对接Revit平台的古建点云快速分类研究
2022-03-18刘永吉李佳恩
刘永吉,李佳恩,吴 翔
(1.吉林建筑大学,吉林 长春 130118;2.吉林大学地球探测科学与技术学院,吉林 长春 130026)
1 引 言
近年来,随着信息化技术深入到社会各个领域,利用三维激光扫描技术进行建筑复原成为可能,国内外大多数研究主要集中于运用三维激光扫描仪对古建筑进行扫描后逆向建模,如 Siwei C 等[1]对建筑体进行了激光扫描。Bouzakis等[2]通过三维激光扫描技术复建了帕台农神庙西部带状雕塑。蔺小虎等[3]对大雁塔进行点云逆向建模。周曦冰等[4]通过点云特征提取,应用于古文物本体图制作。随着三维激光技术应用越来越广泛,通过对点云数据的分类处理能够有效提高数据成果的准确性和高效性[5-7]。通过对点云分类处理,结合BIM技术实现古建筑Revit参数化建模,进而实现基于信息化平台统一管理,对古建筑进行数字化保护与传承正逐渐成为研究热点。
针对城市复杂环境点云数据中建筑物和植被较难分离的问题,利用二者高度、面积、坡度等信息先将建筑物分离,再利用建筑物结果作为约束,较为准确地将二者进行分离[8]。以矿区的彩色三维激光点云数据为研究对象,提出了矿区点云快速自动分类及目标提取的方法[9]。Nourzad等提出基于Bagging和AdaBoost组合分类器将机载激光点云分为植被,地面,房屋三类[10]。点云分类方法大多是建立在物体三维表面模型上,根据其高程、回波强度和表面变化率等信息进行分类,相较于在二维平面上的地物分类,基于三维信息的分类费时、费力,同时对硬件设施提出更高要求,这无疑制约了分类算法在现实中的应用。因此,本文首先对点云数据进行栅格化,将三维问题转为二维;然后提出一种基于PSO_MLP算法的机载激光点云数据分类方法,在减少时间成本和计算机性能要求的基础上,提高了分类精度。
以某古建为试验区,通过Z+F5010C三维激光扫描仪对建筑群点云数据进行数据处理,证明了本文算法的准确性和实用性,在数据精简等方面,实现了对接Revit平台模型创建,为使用点云数据进行历史保护建筑三维数字档案创建打下了基础。
2 方 法
2.1 多层感知机
多层感知机(Multilayer Perceptron,MLP)是一种网络结构,由多层分布的节点组成,各节点在相邻层由不同权重相连接,包含输入层,隐藏层和输出层[11]。MLP网络模型结构图如图1所示。

图1 MLP网络模型结构图
MLP的输出计算步骤如下:首先计算得到输入的加权和:
(1)
其中,n是总输入节点个数;Wij是连接权重;θj是第j个隐含节点的偏置;Xi表示第i个输入信息。
计算输入节点的输出为:
(2)
计算隐藏节点的输出为:
(3)
最终的输出信息为:
(4)

2.2 粒子群优化算法
粒子群优化算法(Particle Swarm Optimization,PSO)是由Kennedy和Eberhart于1995年提出的一种优化算法[12]。最近几年来,在对神经网络参数优化的研究中PSO算法是一个热点。PSO算法的基本思想是利用在神经网络中的微粒对信息的共享性,使得在整个神经网络的运动问题中对于由无序问题对有序问题进行求解成为可能,从而获取最优解。该算法首先初始化一组随机粒子,在迭代过程中计算每个微粒i的适应度,通过跟踪个体极值Pi和全局极值Pg来更新自己。微粒i分别根据公式(5)和(6)来更新自己的速度和位置值:
Vi(t+1)=ω·Vi(t)+c1·r1·[Pi(t)-Xi(t)]+
c2·r2·[Pg(t)-Xi(t)]
(5)
Xi(t+1)=Xi(t)+Vi(t+1)
(6)
其中,Vi(t)是微粒i在t时刻的速度;w是惯性权重;Xi(t)是粒子在t时刻的位置;r1和r2是介于(0,1)之间的随机数;c1,c2是学习因子,通常c1=c2=2。
3 应用案例
3.1 测区概况及预处理
以云南某古建群为试验区,测区测绘面积0.186 km2,测绘单体共计6个,采用德国Z+F5010C三维激光扫描仪获取试验区的彩色三维激光扫描数据。总站点数为81站,密度适中,完成了整个测区的站点覆盖,通过JRC 3D进行交互处理,完成试验区点云数据的拼接、去噪与赋色,如图2所示。该测区点云数据需对接Revit平台进行三维档案创建主要包括高植被、建筑物、建筑物附属、地形及其他等信息。由于测区范围较大,点云数据庞大,首先进行数据分割,对测区范围内6个建筑单体进行分割,分割后的区域均包含地面,建筑,高植等部分,从数据量上考虑仍然较大,另外植被遮挡细部亦影响建模表达,下面以其中一个区域为例进行数据处理。
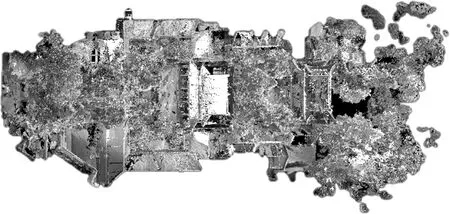
图2 测区鸟瞰图
3.2 数据处理
3.2.1 点云栅格化
由于大多分类算法在二维遥感图像的应用要比三维点云应用更为成熟,且在二维平面中分类所消耗的时间会更短。项目采取降维处理,对于三维数据转换二维处理,使得处理速度大大加快。根据点云数据的原始记录中空间点的坐标、反射率和RGB值进行提取,利用点云数据生成点云图,找到全部栅格点中投影在XOY投影面中反射强度值最大的点,得到与该区域空间点云相对应的栅格化点云。点云与栅格图像如图3、4所示。

图3 点云数据

图4 栅格数据
3.2.2 点云特征提取
由于利用点云的反射强度信息进行分类,具有分类特征单一、对地物反射强度接近、地物复杂处分类效果不理想等特点[11-12]。首先,将栅格数据二值化如图5(a)所示,在此基础上,提取纹理信息以及形状信息,让分类特征更加丰富,可在一定程度上提高分类精度。本文采用统计方法中的灰度共生矩阵方式进行分析,其主要是通过统计分析图像灰度的空间相关特性来实现图像的纹理计算[13]。本文选用了Variance和Mean两种方法进行图像纹理特征的提取,提取结果如图5(b)、(c)所示。

图5 特征提取图
3.3 分类算法建模过程
利用PSO-MLP算法可以对多类别数据分类的优势,应用到站式三维激光扫描点云数据中,构建基于PSO-MLP遥感影像快速分类方法,同时为体现PSO-MLP算法的优越性引入PSO-SVPM算法进行寻优适用度比较,具体建模过程如下:
(1)特征信息提取,训练集(xi,yi),其中xi为特征信息,yi为对应的地物类别,取值为0~3;
(2)利用Python-GDAL函数库和sklearn模块中的MLP代码集成到遥感影像MLP算法中,构建MLP算法分类模型;
(3)PSO算法对MLP与SVM参数对比。本文在应用PSO算法时,最大迭代次数设为50,并作为算法终止条件,选择模型预测结果的平均精度作为适应度函数,将粒子群大小设置为100,学习因子c1设为2.0,c2设为2.0,经过50次迭代计算后,搜索得到MLP算法的隐藏层个数(hidden_layer_sizes)为10,激活函数(activation function)为logistic,SVM算法的惩罚系数c为1.95,核参数gamma为0.27。最优粒子的适应度值变化如图6所示,可以看出,MLP的最优粒子适应度值达到0.9257,SVM的最优粒子适应度值达到0.9240,PSO优化算法对MLP和SVM的优化效果都比较好。

图6 PSO_MLP与PSO_SVM参数适应度
3.4 分类结果
为了验证PSO_MLP算法在点云数据分类中的适用性,作为对比,本文还加入了PSO_SVM算法对研究区内的典型地物进行分类[14],分别利用PSO_MLP和PSO_SVM对测区内的典型地物进行分类,分类结果如图7、8所示。对比两幅分类结果图可以看出,PSO_SVM算法在部分区域存在着明显的“椒盐现象”,且部分地物出现错分现象,尤其是在建筑物和高植被、地物复杂处的边缘等尤为明显。而PSO_MLP算法表现的比PSO_SVM更加优越,克服噪点的能力更好,对于特征信息比较接近的地物也实现了高效的识别。

图7 PSO_MLP分类结果
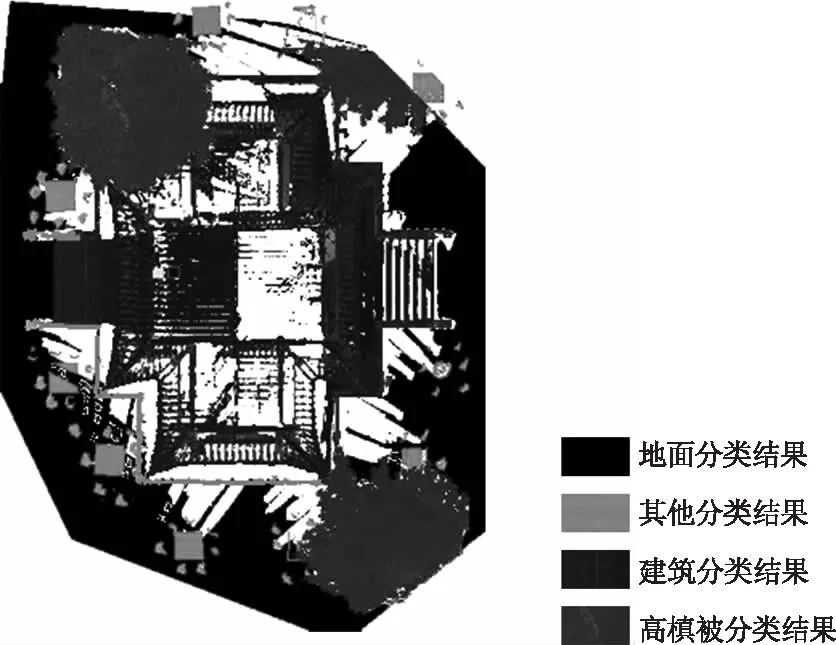
图8 PSO_SVM分类结果
4 精度分析
4.1 混淆矩阵
混淆矩阵能够对分类模型进行性能评价,在图像精度评价中,主要用于比较分类结果和实际测量值,是精度评价的一种格式。本项目采用混淆矩阵来进行分类结果精度评价,统计其分类图像的分类精度、总体分类精度和Kappa系数等指标。
从表1可以看出,由PSO-MLP算法和PSO-SVM算法对图像分类的总体分类精度分别为94.16 %和85.12 %,Kappa系数分别为0.9219和0.8004。 由此可见在本项目中PSO_MLP能够对点云数据分类效果较好。
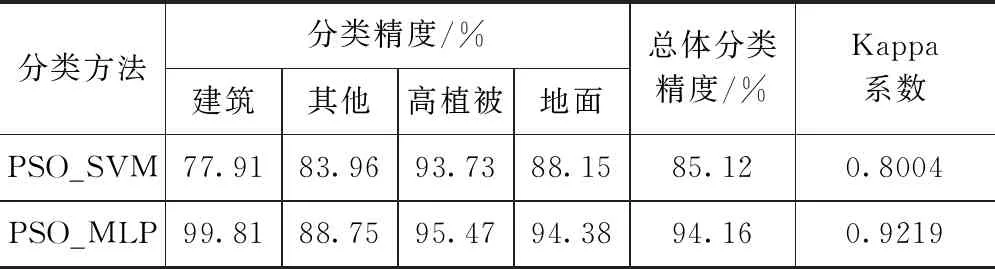
表1 混淆矩阵分类精度指标对比
4.2 ROC曲线
近年来,ROC曲线分析技术越来越多的应用到机器学习领域[15],因其具有对类别分布和代价不敏感,能够成为评价分类器效果的手段之一。AUC表示为:
(7)
(8)
曲线面积AUC的标准偏差的计算公式为:
(9)

试验区采用ROC曲线来进行分类结果精度分析,PSO_MLP算法和PSO_SVM算法对实验区内的地物分类结果如表2所示,ROC曲线分别如图9、10所示。PSO_MLP算法的各地物AUC面积比PSO_SVM算法大,且ROC曲线的TP曲线形态更好,分类器的分类效果更好。

表2 ROC曲线分类精度指标对比
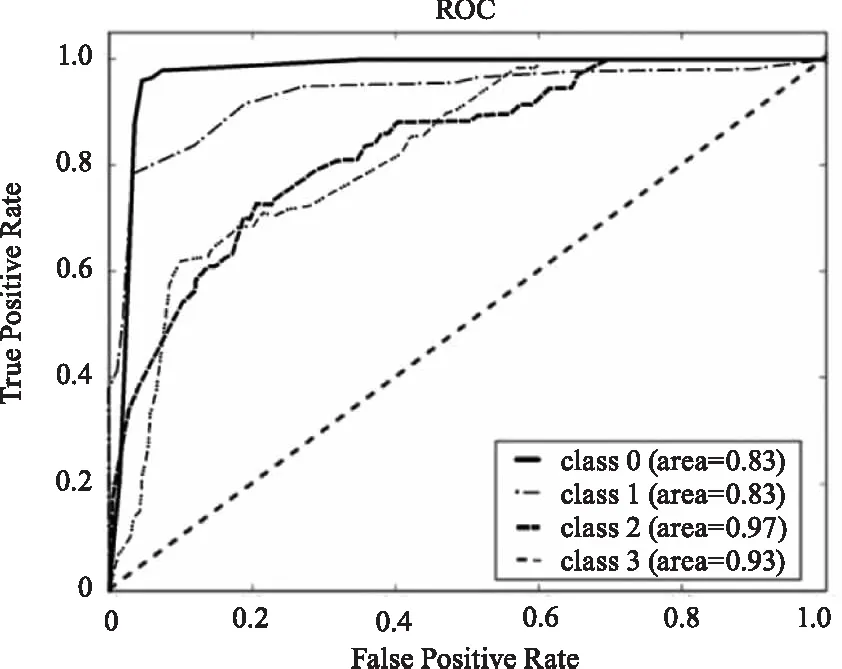
图9 PSO_MLP算法ROC曲线
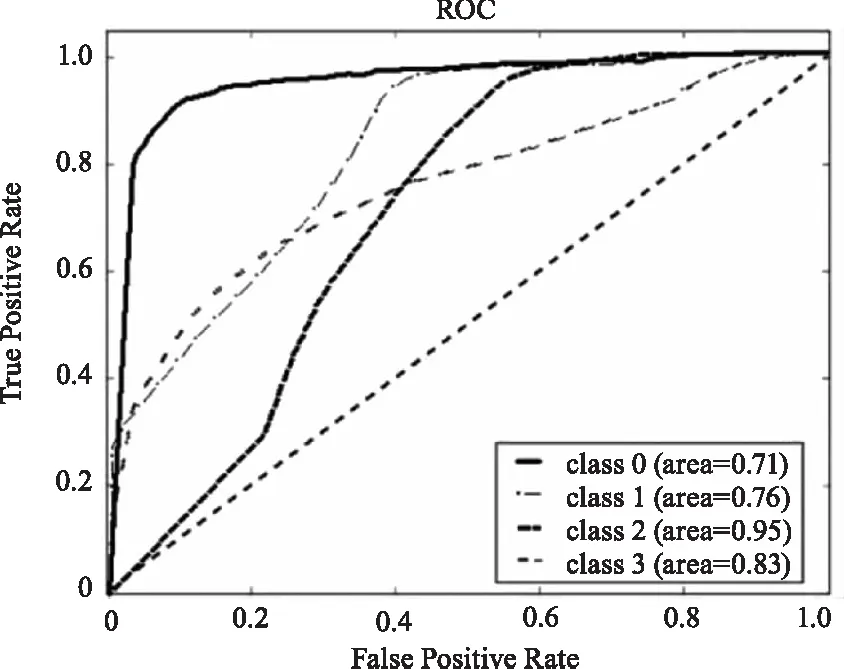
图10 PSO_SVM算法ROC曲线
5 成果应用
将测区点云进行拼接质检后,根据统一密度进行抽稀后,按照建模区域不同进行点云分割,应用算法将测区分割后的区块进行逐一分类,分类后点云类别为地面,其他分类,建筑,高植(见图11),将点云数据保存为Autodesk ReCap数据格式,生成ReCap文件,导入Revit平台进行参数化建模,Revit平台建模成果如图12所示。

图11 点云细分图
图12 Revit模型
6 结 论
本文首先对测区建筑单体进行数据分割,通过PSO_MLP算法对点云数据进行栅格化,并结合纹理信息和形状信息后,利用粒子群优化算法对MLP的参数进行寻优,实现了测区的典型地物的快速分类。结果表明:(1)基于PSO_MLP分类方法的分类在本项目中精度高于PSO_SVM的分类精度;(2)对于分类精度指标,与传统的混淆矩阵相比,将ROC曲线应用于遥感图像分类,结果更为直观,可以清晰地判别各地类的分类情况。分类后的点云特征明显,数据得到精简能够更好对接Revit平台进行参数建模,进而为实现基于信息化平台统一管理奠定基础。
