干线信号协调背景下的网联公交实时优先控制方法
2022-03-18欧诗琪俞春辉马万经
欧诗琪,俞春辉,马万经
(同济大学道路与交通工程教育部重点实验室,上海 201804)
近年来城市地面交通拥堵问题突出,发展公交能引导人们减少私家车出行而缓解这一问题。而公交优先则能提升公交系统的效率和可靠性。“公交优先”于20世纪60年代初,率先在法国巴黎实施[1];1967年美国洛杉矶公路局Wilbur等人提出公交信号优先,从时间层面给予公交优先路权[2]。公交信号优先控制也因其调控灵活度高被广泛应用。现有公交信号优先研究按照不同控制策略可以分成被动优先[3]、主动优先[4-5]和实时优先[6-8]。但以往的研究考虑范围局限在交叉口,少有考虑公交信号优先对已有的干线信号协调的影响。近年来众多研究也指出这一问题,认为公交优先和信号协调问题应一起考虑[9-11]。
但公交优先和信号协调的控制目标不完全一致,甚至相互冲突。公交信号优先类型包括相位延长、早断、相位插入等[12],需调整交叉口信号控制方案;而信号协调方案考虑周期和相位差,以设计出协调相位的绿波带[13],因此信号优先可能会影响协调相位绿灯开始或结束时间而破坏已有干线信号协调,影响社会车辆的通行效率。此外,缺乏考虑公交干线信号协调还可能造成公交无效优先,即公交在某一个交叉口获得信号优先减少的延误可能在下游交叉口遇到红灯而抵消[14]。例如,在背景信号协调方案中公交原本需在下游交叉口停车(子区断开),则本交叉口不必进行无效的信号优先,公交将在同一时刻离开下游交叉口。因此,如何配合已有干线信号协调,同时考虑社会车辆实时状态、公交车停站等特性,充分利用时空资源进行有效的公交信号优先等问题亟待解决。网联技术的发展,使实时准确的公交状态信息可获取,实时控制策略(如驻站控制时长、速度引导)可下发至公交车[15-16],如何利用这些技术在实现公交优先提升效率的同时,改善社会车辆的总体运行效益,仍需探索。
本文提出了干线信号协调背景下的网联公交实时优先控制方法。在路段上,根据公交实时位置预测到达停车线的时间,并以公交能在绿灯期间到达交叉口停车线为目标进行速度引导;在交叉口范围内,考虑已有信号协调方案,以公交不停车通过协调子区内多个交叉口为目标,生成信号优先申请,并建立协同的公交速度引导和驻站控制实时计算方法;最后,在满足信号优先需求的情况下以社会车辆延误最小为目标进行信号优化,最大程度地利用已有干线协调实现公交优先通行,并保障其余相位社会车辆行驶的效益。案例分析表明,该方法在提升信号优先效率和改善社会车辆通行效益方面具有显著效果。
1 问题描述
如图1所示干道,东西向设有路中式公交专用道和信号协调方案(社会车辆绿波带和公交绿波带)。公交车具有网联功能,其实时位置信息、行驶速度等状态信息可获取,且可接收实时的控制策略。交叉口进口道设有公交专用车道,设有线圈可检测社会车辆实时流量信息。基于此,本文研究的问题可以归结为:在干线协调控制背景下,如何实时优化随机到达的公交车的速度引导策略、驻站控制策略和交叉口信号优先方案,尽可能降低公交不停车次数,同时最大化社会车辆效益。信号控制使用双环结构,每个相位都可早启或延长。相位的绿灯早启,等同于优先相位的红灯早断。便于建模,把路口的上行、下行协调相位分别置于顶部、底部的环,称为上行环和下行环,图1中j指相位号码。周期开始和结束的时刻不变,公交通行相位为2、3、6、7;允许上下行双向行驶的公交在同一个交叉口提出优先申请,但优先申请不冲突。
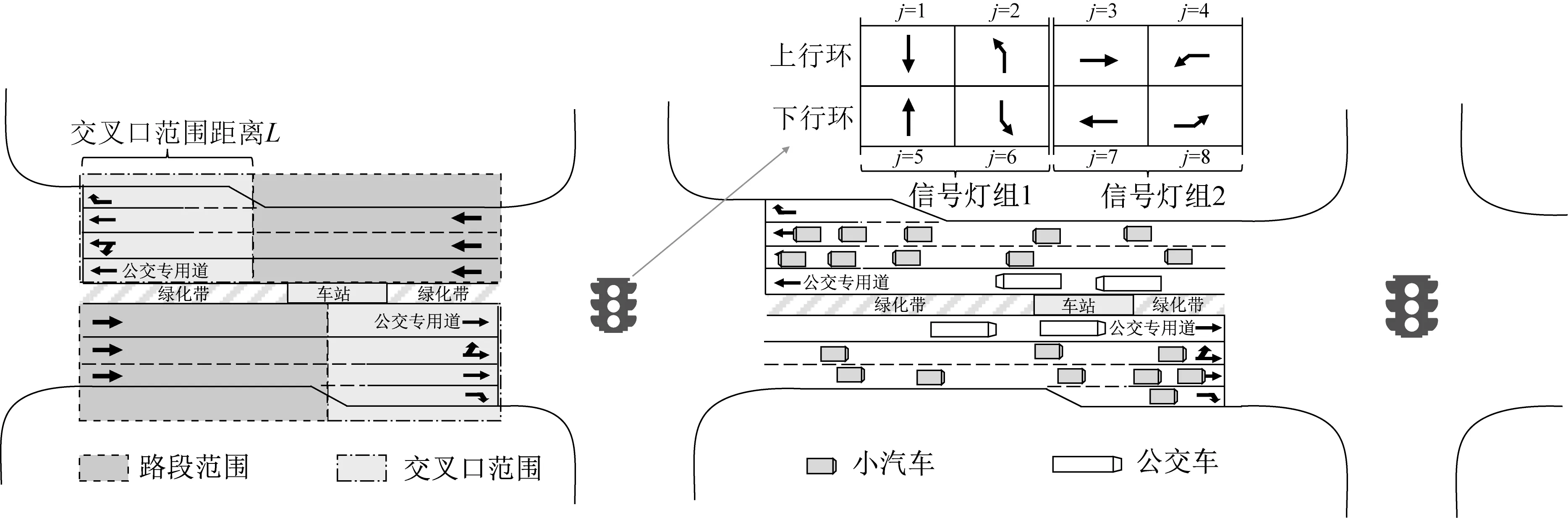
图1 问题场景Fig.1 Problem scenario
2 优化模型与方法
2.1 总体控制逻辑
根据前述分析,为不失一般性,针对干线中任意一个交叉口及其上游路段,建立总体逻辑流程如图2所示。基本逻辑为:当公交仍在路段上行驶未到达交叉口范围且路段无车站时,基于路段速度引导算法对车辆的速度进行控制;当公交到达交叉口范围内时,根据是否设有公交站台,考虑已有干线信号协调的影响,基于路口公交优先申请生成算法,生成公交优先申请、引导车速、驻站控制时长;最后在交叉口,以公交优先申请为约束求解考虑社会车辆的信号优先优化模型,并根据求解结果生成最终的控制策略,包括车速、驻站时间、信号优先方案,以解决如何在信号协调背景下进行有效的公交优先控制问题。其中交叉口范围和路段范围如图1所示。

图2 网联公交实时优先方法总体控制逻辑流程Fig.2 Flowchart of connected bus real-time priority control
2.2 路段速度引导算法
在路段无车站时以及最下游车站在交叉口范围外时,进行实时公交速度引导。通过速度搜索方法,确定公交能在绿灯期间通过的最大速度。步骤如图3所示。

图3 公交路段速度引导算法流程Fig.3 Flowchart of bus speed advisory
步骤1:初始化目标车速为公交运行的最大车速vtry=。
步骤2:当前公交速度大于目标车速时(vc>vtry),则公交匀减速到目标车速后再匀速行驶至停车线;否则(vc≤vtry),公交匀加速到目标车速后再匀速行驶至停车线,用时ta如公式(1)所示。进而计算公交到达停车线的时刻TA(在周期中的第几秒),如公式(2)所示。
式(1)、(2)中:am为公交加减速时的加速度;d为公交与交叉口停车线的距离;TC为当前在周期中的时刻;C为交叉口信号控制周期。
步骤3:若公交到达停车线时刻位于进行了最大绿灯早启和最大绿灯延长控制后的绿灯时段(TG-其中TG和TR分别为绿灯启亮时刻和红灯启亮时刻分别为最大早启时长和最大延长时长),则引导速度为当前目标车速vadv=vtry,结束算法;否则进行步骤4。

步骤4:若当前目标车速小于路段最小速度(vtry<),则没有合适的引导速度,令引导速度为路段允许的最大车速vadv=;否则,令vtry=vtry-1后,返回步骤2。
2.3 路口公交优先申请生成算法
首先需要计算公交优先相位绿灯最大早启时间和最大延长时间。绿灯最大早启、延长时长考虑两个因素:①公交相位绿灯按照最大早启、延长时长优先后周期剩余时间应能满足其余相位的最小绿灯时长;②优先有效性,即公交在最大早启、延长时刻通过当前交叉口后也能不停车通过子区内的下游交叉口,如公式(3)和(4)所示。其中相位j的最短绿灯时间fˇj考虑可接受最大相位饱和度s^下的绿灯时长与信号机中的最短绿灯时长gˇj,如公式(5)所示。
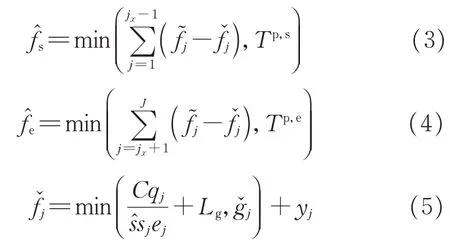
式(3)~(5)中:f~j为相位j原始的相位时长;Tp,s和Tp,e分别为考虑优先有效性的最大早启和延长时长;jx为公交优先相位号码;J为公交优先相位所在环的最后一个相位的相位号码;qj为相位j对应车流量;sj为相位j的车道饱和流量;ej为相位j对应的车道数;Lg为绿灯损失时间;yj为相位j的清空时间。
进一步计算考虑优先有效性的最大早启和延长时长。不失一般性,要使公交通过当前交叉口后能不停车通过子区内任意下游交叉口i,则需保证公交离开当前交叉口时在(已有信号协调方案的)绿波带内。由于交叉口都允许绿灯早启和延长,绿波带可拓宽,如图4所示。进一步根据路段行程时间、停站时间、相位差,计算公交到达下游交叉口i的绿波带最早开始时刻和绿波带最晚结束时刻对应的离开本交叉口的时刻,如公式(6)和(7)所示。
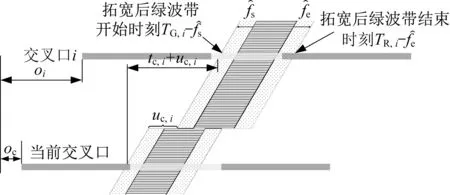
图4 交叉口间拓宽绿波带关系Fig.4 Expanded green wave between intersections

式(6)、(7)中:TG,i为下游交叉口i的绿波带开始时刻;TR,i为下游交叉口i的绿波带结束时刻;tc,i为当前交叉口行驶到下游交叉口i的行程时间;uc,i为当前交叉口行驶到下游交叉口i的停站时长;oi为下游交叉口i的绝对相位差;oc为当前交叉口的绝对相位差。
考虑子区内所有下游交叉口拓宽后绿波带开始和结束时刻,取所有下游交叉口拓宽绿波带在本交叉口映射的交集,可得考虑优先有效性的相位最大早启时长Tp,s和最大延长时长Tp,e,如公式(8)和(9)所示。
建立路口公交优先申请生成算法,输出公交所需绿灯早启、延长时长、建议车速、驻站时间。具体步骤如图5所示,粗线框为不同条件下计算出来的最终结果。
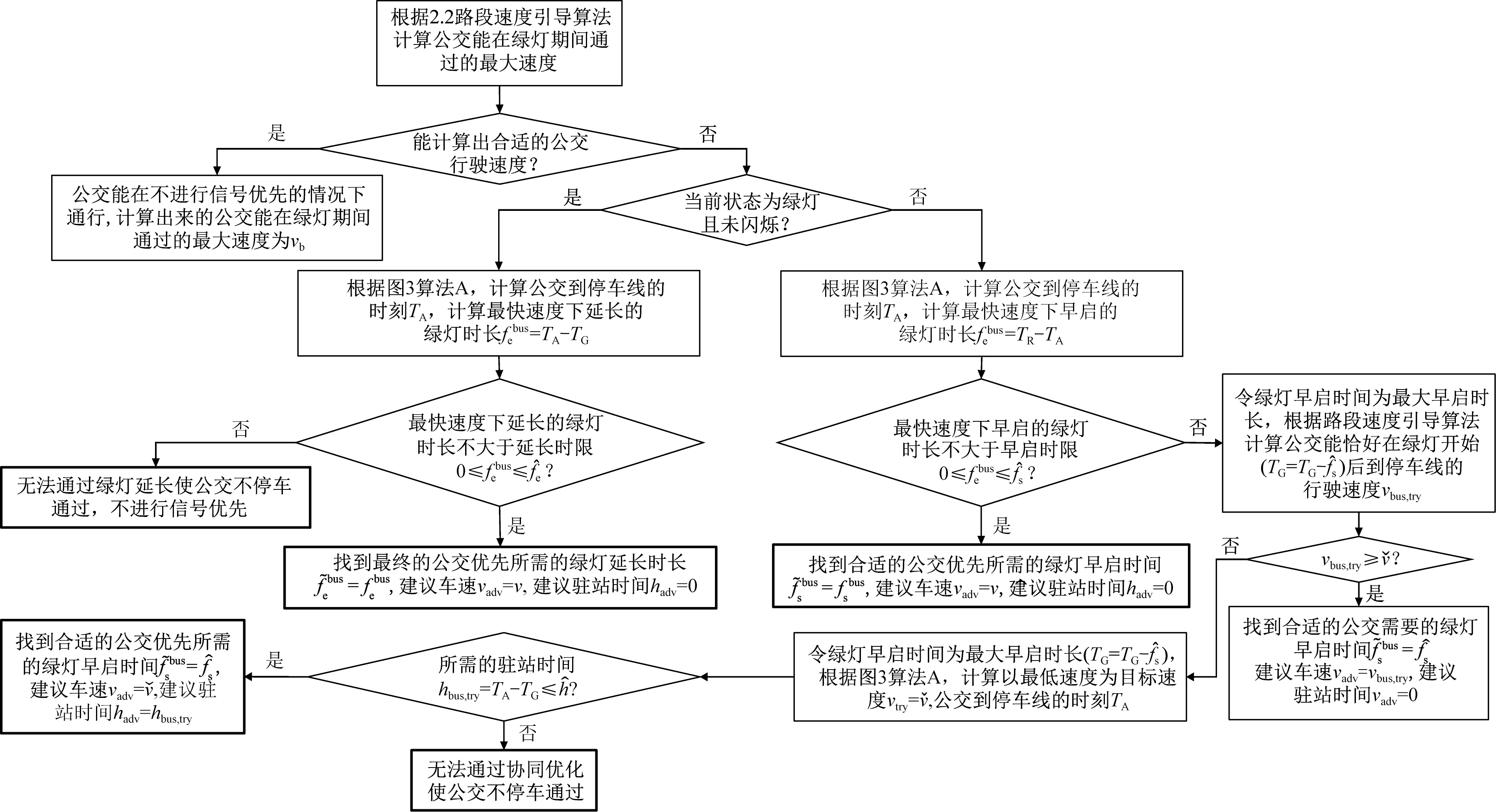
图5 路口公交优先申请生成算法流程Fig.5 Flowchart of bus priority request generation
步骤1:若路段速度引导算法能计算得到公交引导速度vb,则该公交能在不进行信号优先的情况下不停车通过当前交叉口,建议车速vadv=vb,公交优先需求建议和驻站时间都为零,;若无法计算得到引导速度,则判断交叉口当前状态是否为绿灯且未闪烁(若有),若是,则进行步骤2;若否,则进行步骤3。
步骤2:根据图3算法A计算公交以最快速度行驶到达停车线的时刻TA,得到公交所需的绿灯延长时长fbuse=TA-TG,TG为公交优先相位绿灯开始的时刻。若此时绿灯延长时长不大于最大延长时间,则公交优先所需的绿灯延长时间=fbuse,建议车速vadv=v^,建议驻站时间hadv=0;否则表示无法通过绿灯延长使公交不停车通过,不进行


考虑到干线设有双向绿波带,若上行方向进口道和下行方向进口道都有公交提出申请,则分别计算它们所需的公交优先时长。由于双向的公交行驶方向所处的相位是同时放行的,因此这些公交优先申请不会冲突,在下一步考虑社会车辆的信号优先优化模型中,约束满足所有公交的优先申请进行求解。
2.4 考虑社会车辆的信号优先优化模型
根据上述计算得到公交所需的绿灯早启和延长时长作为约束,进一步建立以最小化社会车辆延误为目标的信号优先方案优化模型,求得考虑社会车辆行驶效益的信号优化方案。优化模型的变量为各相位早启、延长时间。
2.4.1 目标函数
模型的目标是最小化社会车辆延误。研究表明在非饱和情况下基于确定式排队模型的延误计算方法与考虑车辆到达随机性的延误计算模型差异小于6%[17],因此社会车辆延误基于确定式排队模型进行近似计算。在红灯期间,社会车辆到达交叉口形成队列,此时该进口道该流向流量q为到达率;绿灯启亮后,队列开始消散,消散率为总饱和流率,即该流向对应的车道数e乘上一条车道的饱和流率s。因此,社会车辆在一个周期内的延误为排队的车辆乘以其等待的时间(即由到达率、消散率和横坐标轴围成图形的面积)再乘上每辆社会车辆的平均乘客数。按照不同进口道不同转向,总社会车辆延误计算如公式(10)和(11)所示。

式中:Dcar为社会车辆总延误;D acar为进口道a对应的社会车辆延误;qat、qal、qar分别为进口道a的直行、左转、右转社会车辆实时流量;ws为汽车饱和流率的天气折减系数;eat、eal、ear分别为进口道a的直行、左转、右转车道数;st、sl、sr分别为一条直行、左转、右转专用道的饱和流率;tra,t、tra,l、tra,r分别为进口道a直行、左转、右转的优化后红灯时长;t~ra,t、t~ra,l、t~ra,r分别为进口道a直行、左转、右转的初始红灯时长;bacr为进口道a右转车辆是否受控,是则为1,否则为0;P为包含司机在内的社会车辆平均载客数。
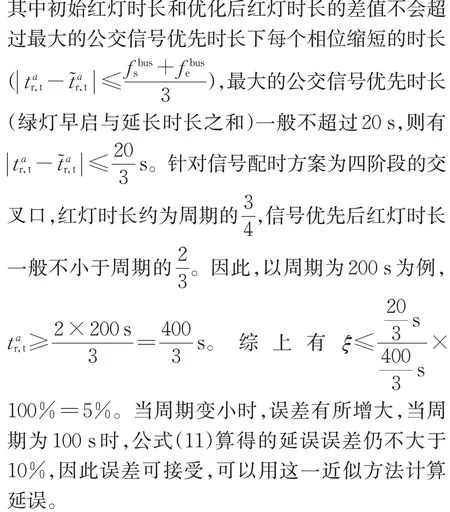
公式(11)中,分母中的3 600是因为其中一个与流量相乘的红灯时长单位应化为小时;三项的分子原本应是优化后红灯时长的平方,为了便于求解将模型简化为线性优化,其中一个优化后红灯时长以初始红灯时长这一参数代替。以直行车辆为例,计算社会车辆延误的误差为精确值与近似值的差异Δt,即

2.4.2 约束
约束C1:公交所需的信号优先约束。根据路口公交优先申请生成算法计算得出的公交所需信号优先时长,约束相位变化必须满足公交所需绿灯早启时长fsbus和绿灯延长时长febus,则有

引入0-1变量φjs和φje对约束进行线性化处理,则有
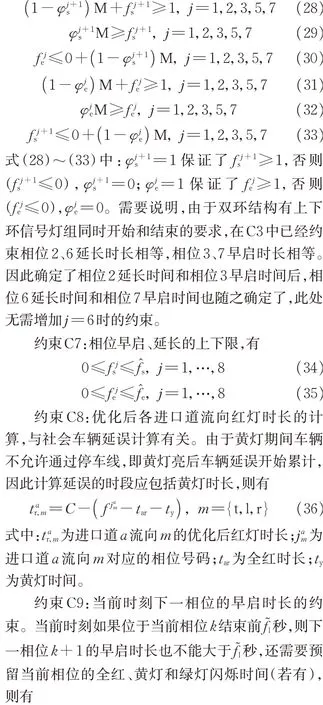
式中:tb为绿灯闪烁时间(无绿灯闪烁时tb=0)。条件判断只涉及参数,因此不需要线性化处理。
约束C10:当前相位即将结束不能延长的约束。如果当前时刻处在当前相位k的末尾,已经开始绿灯闪烁,则当前相位k不允许延长,下一相位k+1不允许早启,则有
3 案例分析
3.1 实验设计
为了测试本文提出的模型效果,以郑州南三环沿线5个路口(图6a)为例进行验证。在VISSIM上搭建仿真模型,根据实际流量(表1)标定仿真路网,如图6b所示。公交发车间隔为300 s,只有在干线上行驶的公交申请优先。当公交到达交叉口范围,激活路口公交优先申请生成算法和考虑社会车辆的信号优先优化模型。为验证本文方法对干线信号协调的配合效果,对比不优化、仅协调控制(基于PMBAND模型[13])及本文方法(以PM-BAND模型[13]为背景信号协调方案)的效果,采用不同随机种子运行10次。
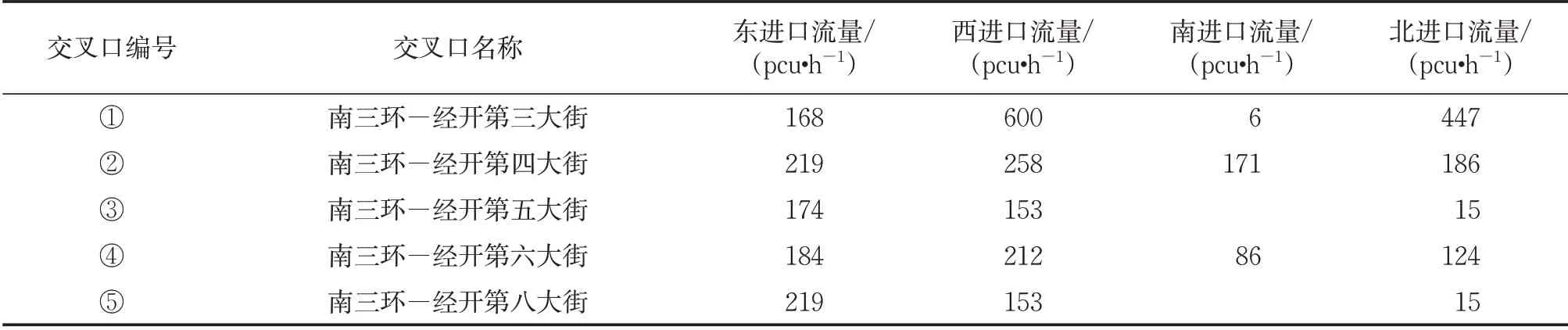
表1 仿真交叉口流量数据Tab.1 Intersection volume data in simulations

图6 郑州南三环沿线交叉口Fig.6 Intersections along the South Third Ring Road in Zhengzhou
进一步分析模型取得效果的内在原因,分别对路段速度引导算法、路口公交优先申请算法、考虑社会车辆的信号优先优化模型进行数值仿真测试。案例涉及一个十字交叉口的控制,公交在相位3通行,公交在路段上的最大和最小速度分别为40和10 km·h-1,加减速时的加速度为1.05 m·s-2。公交在进入路段时马上激活算法开始进行速度引导,此时距离交叉口停车线350 m,公交车速20 km·h-1。交叉口信号控制周期为190 s。上行环和下行环四相位对应时长相同,从相位1至相位4时长分别为58、38、58、36 s。所有相位时间都包含位末尾的黄灯时间3 s,相位2、4、6、8还包含全红时间3 s。
在上述案例设置基础上进一步测试路口公交优先申请生成算法。当前公交恰好在停靠站完成服务,距离停车线150 m,当前车速0 km·h-1。根据公式(3)~(9)计算公交优先相位的最大早启时长和最大延长时长,计算得最大早启时长和最大延长时长皆为10 s。在考虑社会车辆的信号优先优化模型测试中,为测试不同公交优先申请策略的影响,选择绿灯早启、延长两组需求场景进行测试。此外为了分析社会车辆流量的影响,确保交叉口不饱和情况下设置高中低3组流量参数(见表2),而中、低流量分别是对应高流量数据的60%、30%。对比在不控制(执行原有信号配时方案)、仅优先(满足公交优先申请但不进行信号优先优化)、优先且优化(本文)3种情况下公交延误和社会车辆延误,并进一步分析高流量下不同交叉口范围(50、100、150、200、250、300 m)对模型效果的影响,令公交在周期内每一秒到达交叉口,对比社会车辆平均延误、公交平均延误和公交停车次数优化前后降低率。

表2 交叉口流量数据Tab.2 Intersection volume data
3.2 仿真测试结果
如图7所示,在本文提出的方法控制下干线上社会车辆平均延误和公交平均延误均最低,低于仅进行协调控制的情况;而仅进行协调控制优于不优化的情况。由此可见,在协调控制已经能提升整体干线交通流运行效率的同时,本文提出的动态公交优先控制方法还能进一步降低延误(比不优化降低公交平均延误43%,比仅协调控制降低公交平均延误15%),提升干线系统中公交车辆的运行效率。此外,本文方法下社会车辆延误最低,这是因为本文提出的方法中包括了基于实时流量以社会车辆延误最小为目标的信号优先优化,因此同时兼顾了社会车辆行驶效益。
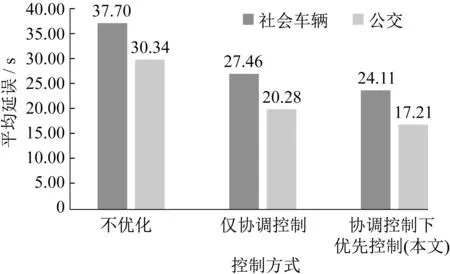
图7 不同控制方法下公交与社会车辆平均延误对比Fig.7 Comparison of average private vehicle delay and average bus delay in different control methods
3.3 路段速度引导算法效果
图8 展示了速度引导下和无引导下公交在不同时刻从350 m位置出发行驶到停车线的轨迹。速度引导下,根据公交通行情况不同可以把一个周期划分成4部分,分别是①公交在绿灯前的主动优先期间通行、②公交在绿灯期间通行、③公交在绿灯后的主动优先期间通行、④公交在红灯期间到达等待。在时段①,公交在速度引导算法下降低行驶速度使得其能在绿灯早启期间通过;在时段②、③,公交按允许最高速度行驶能不停车通过;在时段④,公交被引导以最快速度行驶,因为无法不停车通过,最快驶到路口排队被认为最有利。此外,在时段①,公交轨迹有相互重叠的现象,早出发的公交可能更晚到达停车线。因为车速引导值为整数,距离较长导致改变一单位车速会对公交到达停车线时刻影响较大。引导车速恰好增加一单位的公交,可能比其早出发1 s的车辆(引导车速少一单位)早到。对比图8a和图8b,速度引导下公交的不停车率为比无引导下公交的不停车率因此,本文提出的路段速度引导算法可显著提升公交的不停车率。

图8 路段速度引导算法效果Fig.8 Effects of speed advisory algorithm
3.4 路口公交优先申请生成算法效果
表3展示了在一周期内10个关键触发时刻的计算结果,证明了公交优先申请算法能成功算出公交优先申请需求和速度引导及驻站控制。表3展示了一周期内不同阶段的分界点。一周期可分成5个阶段,其优先效果分别是①无法不停车通过、②需驻站控制和绿灯早启、③仅需绿灯早启、④不需任何优先、⑤仅需绿灯延长。这说明公交优先申请算法能生成协同的车速引导、驻站控制和优先申请策略,利用网联技术实时下发指令优势,相比无法进行驻站控制的算法能提升公交享受优先的时间范围,实现不停车通过。

表3 路口公交优先申请生成算法案例计算结果Tab.3 Results of bus priority request generation algorithm
3.5 考虑社会车辆的信号优先优化模型效果
图9 为表3案例4、9在3种流量水平和不同控制方法下的社会车辆延误。针对所有流量水平,社会车辆延误在不控制情况下的延误是最高的,进行了公交优先和信号优化后延误最低,降幅约6%。仅优先控制下延误水平中等,但仍低于不控制的情况。因为公交优先申请的相位是干线直行相位,流量较大,对公交相位进行主动优先能提升该大流量相位的社会车辆通行效益,降低整体社会车辆延误。而流量水平的变化仅对延误的绝对值有影响,模型效果对流量不敏感。公交延误方面,因3种流量水平下公交延误一致,本文仅展示高流量情况下的公交延误。如图10所示,进行公交优先能明显降低公交延误,但是否进行信号优化对公交的影响不大。案例9在不控制情况下的公交延误特别高,因为案例中公交只能在绿灯延长后才能不停车通过,而不控制时公交在红灯初期到达导致公交需要等待较长的红灯造成很长的延误。
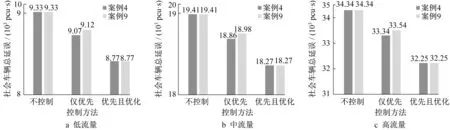
图9 不同控制方法下社会车辆总延误Fig.9 Private vehicle delays in different control methods
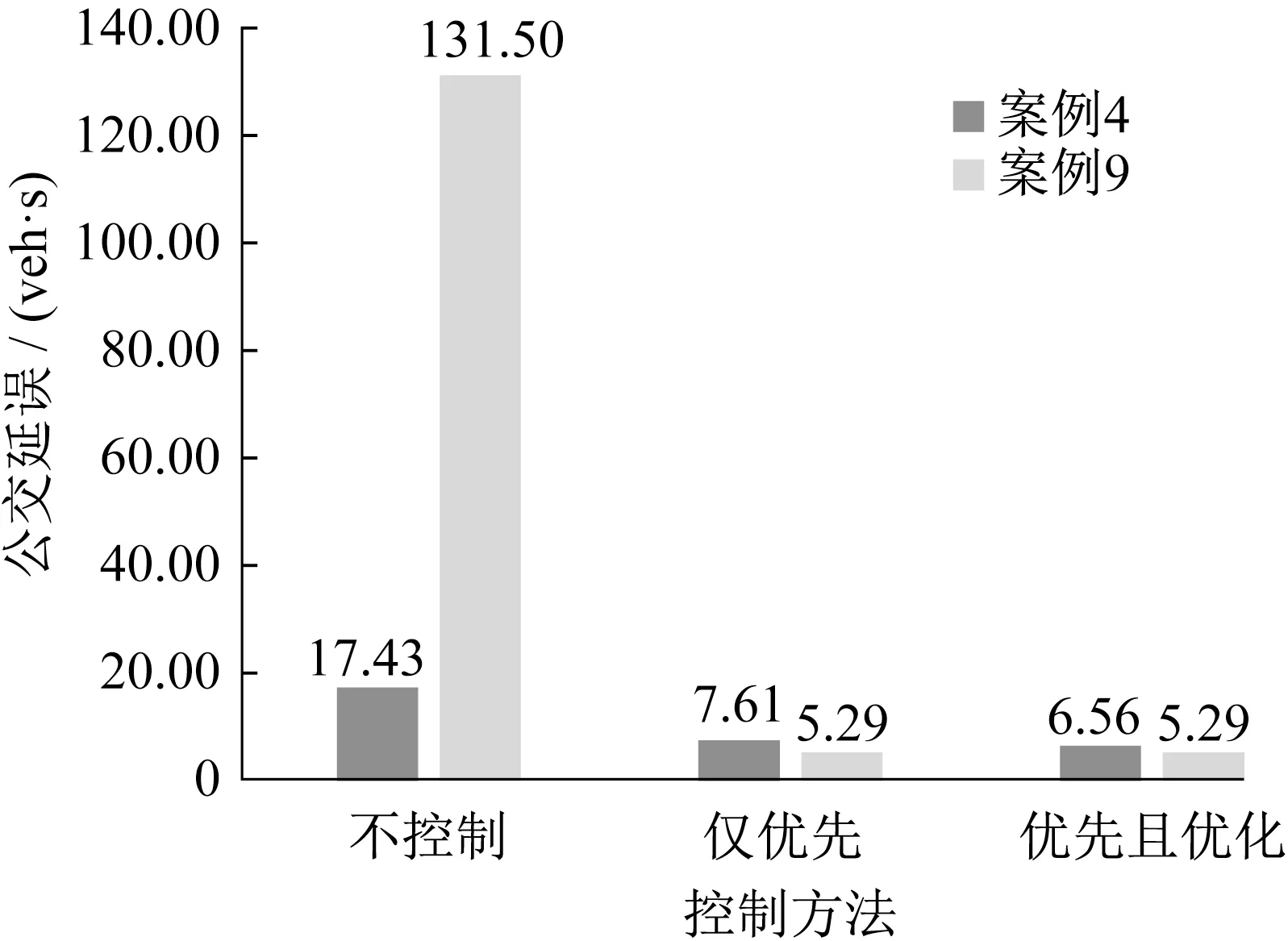
图10 高流量不同控制方法下的公交延误Fig.10 Bus delays of different control methods in a high volume scenario
图11 为高流量情况下,不同交叉口范围社会车辆和公交的延误降低率以及公交停车次数降低率。其中降低率是指本文控制方法下延误或停车次数比不控制情况下延误或停车次数降低的百分比。随着交叉口控制距离的增加,公交停车次数降低越来越显著,公交延误降低率也随之增加,但上升速度在距离大于100 m后放缓。因为更长的控制距离给予了公交更大的控制空间,公交能通过速度引导更灵活地调整其到达停车线时刻从而实现不停车通过。但速度引导不能减少公交在到达停车线前的延误,只能影响停车次数,因此当距离足够大,交叉口控制距离增加带来的延误降低放缓。另一方面,模型降低的社会车辆延误对交叉口控制距离不敏感。社会车辆延误降低率缓慢增加是因为距离更长,更多场景下公交能享受公交优先,而公交优先申请了流量较大的干线直行相位使得社会车辆延误略微降低。
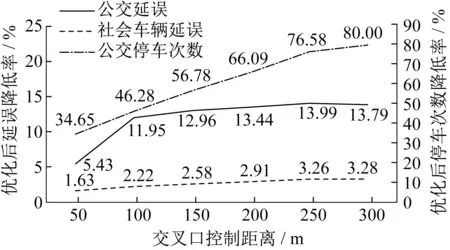
图11 不同交叉口控制距离下延误及公交停车次数Fig.11 Private vehicle delays and bus stop times in different intersection control distances
4 结语
本文提出了干线信号协调背景下的网联公交实时优先控制方法。与传统研究不同,该方法配合已有的信号协调,为公交提供一体化的速度引导、驻站控制、信号优先服务。这一方法既能提升公交运行效益,又保证了社会车辆的行驶效益。案例分析验证了本文方法的有效性。
本文提出的方法能保障已有干线协调的效益,优于仅进行信号协调控制;本文提出的路段速度引导算法和路口公交优先申请算法充分利用网联技术的优势,使在更大时间范围内到达控制点的公交能享受优先,提升公交不停车率;本文提出的考虑社会车辆的信号优先优化模型能在满足公交通行需求的情况下保证社会车辆的通行效率;更大的交叉口范围有利于降低公交延误。
但本文未考虑交叉口多冲突优先申请的处理,以及路段上多辆公交之间行驶轨迹的相互影响,也没有考虑公交与社会车辆混行场景下的公交的运行特点。日后将把公交轨迹点规划作为控制手段之一,并把多冲突优先申请以及交叉口排队对公交的影响考虑在内,提升控制方法的适用性。
作者贡献声明:
欧诗琪:建模,测试分析,论文撰写。
俞春辉:论文修改。
马万经:提出想法,论文修改。