双重键合结构石墨烯压力传感器的设计与仿真*
2022-03-17陈绪文王俊强
陈绪文 王俊强,2
(1.中北大学仪器与电子学院 太原 030051)(2.中北大学前沿交叉学科研究院 太原 030051)
1 引言
单层石墨烯是一种厚度仅为0.335nm的新型二维材料,特殊的碳原子蜂窝状晶格结构自问世起就成为各方研究的热点内容[1]。英国曼彻斯特大学的诺沃肖洛夫和海姆教授通过探索研究在2004年通过微机械剥离法成功的从石墨中剥离出了石墨烯[2]。从此,这种全新的二维材料开始出现在大众的视野内,它具备卓越的电学、力学性能和半导体工艺加工兼容性,在压力测试、光电传感、生物医学、能量存储和散热等领域都表现出了不菲的应用前景[3~7]。尤其是在压力测试领域,其特征参数比表面(2630m2/g)、电子迁移率200000cm2/V·s、1 TPa杨氏模量较传统的硅压阻材料更加优异,这也使得应用石墨烯作为核心敏感单元的压力传感器具有广阔的应用前景[8]。按照目前石墨烯MEMS压力传感器的器件结构可以将其分为悬浮式、电容式、隧穿式以及柔性应变式等,石墨烯的力敏机理本质上是力学信号使石墨烯发生形变,然后石墨烯的带隙打开引起石墨烯的电阻发生改变[9]。近年来研制出了一些基于石墨烯压阻效应的压力传感器,比如Sorkin和Zhang进行了原子模拟,研究了石墨烯基压力传感器的失效行为,该传感器由悬浮在碳化硅衬底上的石墨烯纳米膜组成[10]。Smith等从石墨烯紧束缚模型理论作为切入点进行了石墨烯压力传感器研究,开创性的研发了首款较为完整的悬浮式石墨烯压力传感器[11]。Jiang等针对石墨烯压力传感器进行了力学建模仿真,结果表明矩形结构相比圆形结构性能更加优良[12]。虽然石墨烯压力传感器已经取得了许多成就,但仍然存在着许多问题,裸露的石墨烯暴露在空气中的时候会与空气中的污染物发生吸附或者掺杂效应,导致石墨烯稳定性差或者变性失效,并且目前研究的石墨烯压力传感器大多量程较小、封装形式传统、体积较大,无法满足压力传感器在复杂环境下的测量要求[13~14]。
文中为了将石墨烯压力传感器应用到大量程压力测量,提出了一种新型的硅膜承压、双重键合式石墨烯压力传感器结构,通过仿真研究传感器的力敏特性,并且反馈到结构模型上进一步优化传感器的灵敏度,具体工作是通过受压形式简化压力传感器结构模型,利用仿真软件进行建模分析,从形状和厚度进行了仿真优化。这些工作得到了一种新型大量程石墨烯压力传感器,对石墨烯在理论上和实际化应用具有一定的指导意义。
2 石墨烯压力传感器结构设计
传统的石墨烯压力传感器通常采用石墨烯直接承受压力,这导致传感器的量程都普遍偏小,而且裸露的石墨烯也更容易受到污染。本文提出了一种利用承压硅膜传递位移,采用双重键合完成封装的石墨烯压力传感器,结构示意图如图1所示,压力传感器芯片主要由承压硅膜、敏感芯片和基板3部分组成,最后承压硅膜和敏感芯片以及基板在氮气范围下通过金属互连形成无氧气密环境,石墨烯与外界完全隔离,实现对石墨烯的防护。

图1 整体结构示意图
3 传感器建模与仿真
3.1 模型与参数
结合设计的压力传感器结构受压情况,建立有限元仿真模型,由于石墨烯的形变受到承压硅膜的直接影响,可以将整个传感器的受压情况视为承压硅膜中弹性膜片在受压,因此仿真的核心在于弹性膜片的尺寸和形状设计,设计的目标为在硅的许用应力范围内时,石墨烯要尽可能达到最大的限度,以此来达到提高灵敏度的目的。石墨烯的应变与承压芯片中的弹性膜片的应变有关,对于这种承压硅膜+十字梁结构的压力传感器,由于承压硅膜在上面承受了大部分的压力,故当传感器芯片受到压力时,下方的十字梁上基本不受力或只受到很小的一部分力,十字梁上产生的应力、应变等参数,与承压硅膜的向下位移有直接关系,为了便于仿真建模,将传感器结构简化为硅弹性膜片加下方十字梁的形式,要确定的参数就是膜片的大小以及厚度,要求硅弹性膜片达到最大应力和应变的同时要在硅材料性能范围内。本次仿真设计传感器的量程在100MPa,在保证量程的同时要使石墨烯达到尽可能大的应变,通过调研硅的材料参数取弹性模量为130GPa,泊松比为0.278。在建模完成后,约束条件选择在四周施加固定约束,并选择极细化网格以提高仿真结果的准确性。对于弹性膜片的形状,比较常见的形状有矩形、方形和圆形,由于十字梁对硅弹性膜片有支撑作用,因此建模分为上下两部分,上面的承压硅膜和下面的十字梁芯片,承压硅膜大小为5.2×5.2mm2,十字梁所在的敏感芯片为6.5×6.5mm2,按照工艺加工的可能性将膜片的初始厚度设定为200μm,同时在保障面积相同的情况下将矩形、方形、圆形膜片的大小尺寸分别设定为800μm×1250μm,边长1000μm,半径564.2μm。
3.2 不同形状的膜片仿真
为了选择最优形状的膜片,在矩形、圆形和方形膜片上施加0~100MPa的压力,并且每5MPa选取一个观测点,通过仿真得到了三种形状下膜片应力、应变随压力递增的变化情况,结果如图2所示。从图中可以看出,在三种形状面积相同的前提下,圆形膜片的应力最高,方形膜片次之,矩形膜片最小,但整体上圆形膜片和方形膜片的最大应力差距不大,最大应变也是同样的情况,圆形膜片最高,方形膜片略低,而矩形膜片最低。从数据中可以得出的是方形弹性膜片和圆形弹性膜片基本差不多,而考虑实际的加工过程,方形的膜片比圆形的膜片更容易加工,并且在石墨烯的布置位置选取上可以更加的灵活,因此本文中的压力传感器膜片选择方形。
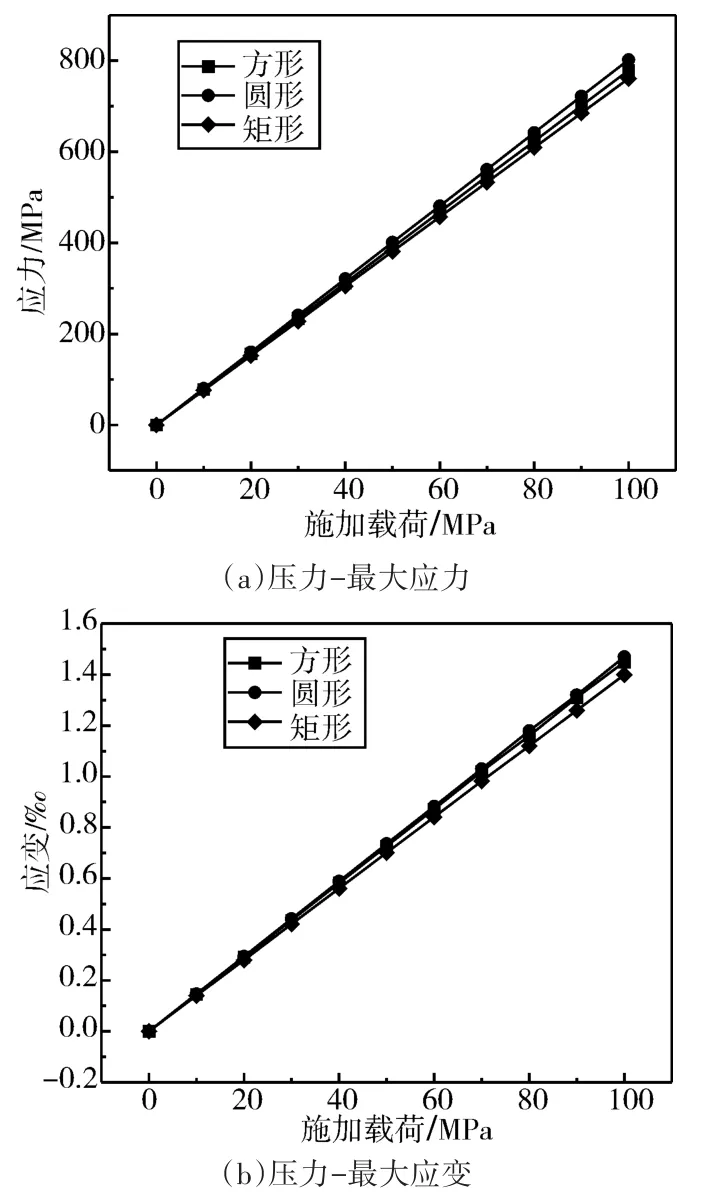
图2 不同形状膜片仿真结果
3.3 不同尺寸膜片仿真
在确定了承压硅膜中的弹性膜片采用方膜后,进一步需要确定的是膜片的尺寸,也就是膜片的厚度和边长,因此本小节重点对比膜片的厚度和边长参数改变的仿真结果。
3.3.1 不同边长膜片仿真
首先固定膜片的厚度为200μm,改变边长的范围为800μm~1300μm,步长为100μm,然后在膜片上施加0~100MPa的压力,同样每5MPa选取一个观测点,通过仿真得到了方膜形状下不同边长膜片应力、应变随压力递增的变化情况,结果如图3所示。从图中可以看出,膜片的最大应力和最大应变随着边长的增加而变大,也即膜片的边长越大,传感器的灵敏度越高,随着边长的逐渐增大,应力和应变的增长也开始逐渐变缓,在膜片边长达到1200μm的时候最大应力到达了890MPa,当边长超过1000μm后,增大边长以提高灵敏度的作用也在逐渐减小,因此最终本文选择了1000μm的方形膜片。
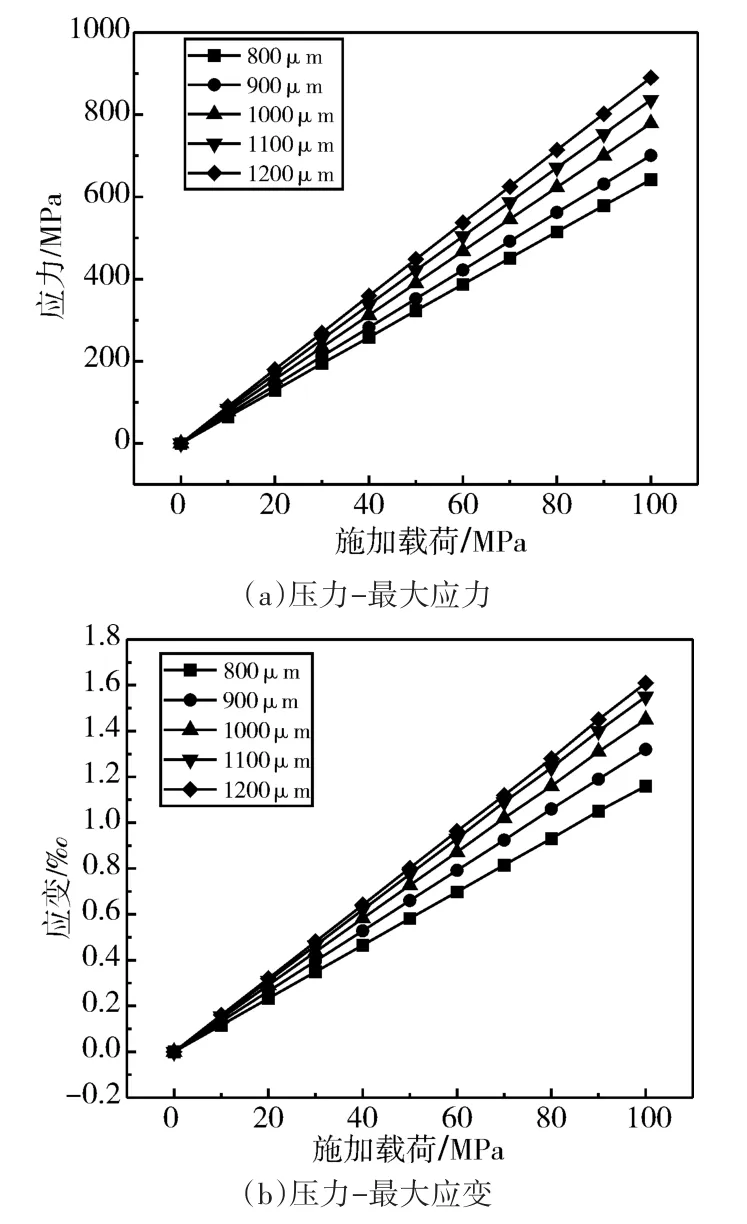
图3 不同边长方形膜片仿真结果
3.3.2 不同厚度膜片仿真
首先固定膜片的边长为1000μm,改变厚度的范围为170μm~220μm,步长为10μm,然后在膜片上施加0~100MPa的压力,同样每5MPa选取一个观测点,通过仿真得到了方膜形状下不同厚度膜片应力、应变随压力递增的变化情况,结果如图4所示。从图中可以看出,膜片的最大应力和最大应变随着厚度的增加而减小,也即膜片的厚度越大,传感器的灵敏度越低,但随着厚度的逐渐减小,应力和应变的增长也开始逐渐变快。根据文献调研,硅材料的弯曲强度为7GPa,一般许用应力选择在弯曲强度的10%左右,考虑工艺加工取900MPa作为硅的最大许用应力,如图当膜片厚度为170μm时,膜片的最大应力为880MPa,最大应变为1.85‰,因此最终确定选择边长为1000μm、厚度170nm的方形膜片。
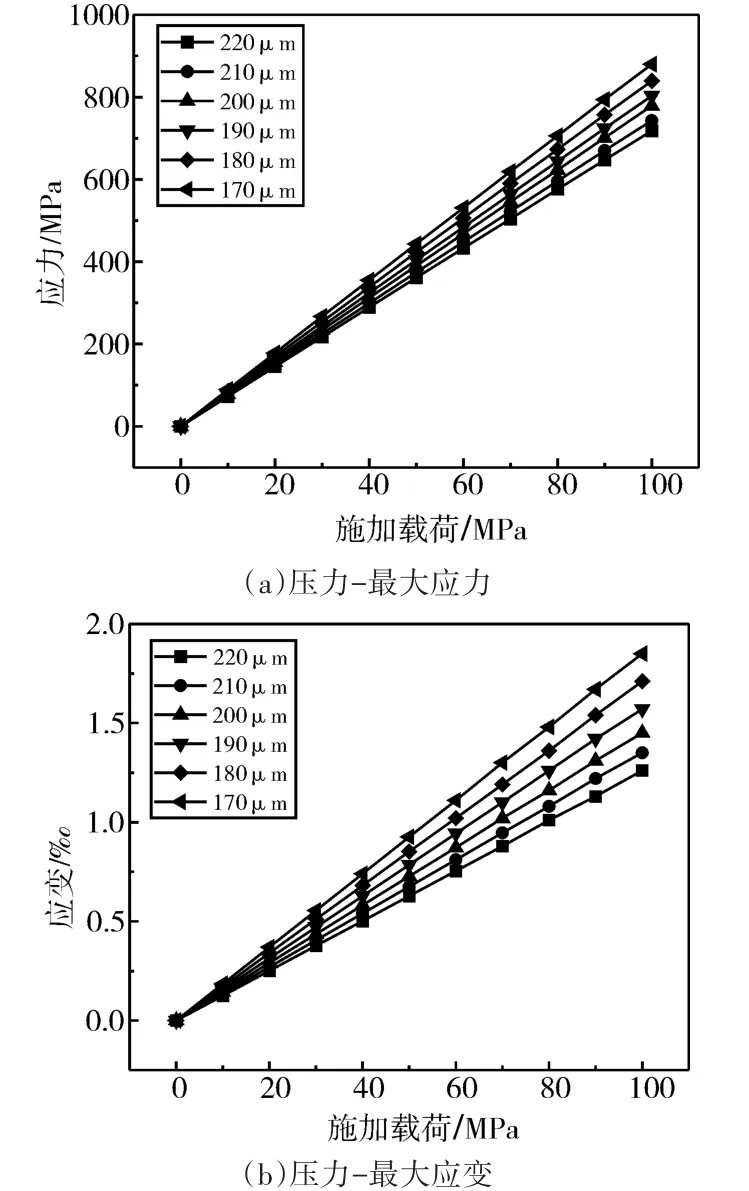
图4 不同厚度方形膜片仿真结果
4 结语
本文设计了一种硅膜承压、双重键合结构的石墨烯压力传感器,利用COMSOL有限元仿真元件对设计的传感器结构进行了简化建模分析,结果表明,在相同面积下,方形和圆形膜片的应变相差无几,但圆形膜片的应力较方形膜片更大。在选取方膜情况下,边长越大,灵敏度越高,但灵敏度增加趋势会逐渐降低,同样的厚度越小,灵敏度越高,且灵敏度增加趋势会逐渐提高。在0~100MPa的压力量程下,最终设计了最优膜片为边长1000μm、厚度170μm的方形膜片,石墨烯应变为1.85‰。硅膜承压、双重键合结构的石墨烯压力传感器的设计与仿真对石墨烯压力传感器工作的延申具有一定的指导作用。
