机械手抓取条件下苹果果肉应力情况研究
2022-03-17徐鑫哲
徐鑫哲
(长春工业大学,吉林 长春 130012)
0 前言
我国是世界第一大水果生产国,也是世界第一大水果消费国[1],其中苹果的生产量居世界首位[2]。据统计,2021年我国苹果种植面积超过3 000万亩,产量4 100万t[3]。国内苹果采摘大多数为人工采摘,在苹果的盛产期,需每日进行采摘,采摘周期长,果农需仰头采摘,劳动强度大。并且在采摘过程中,易导致苹果被损伤,而损伤的苹果是不易保存的,所以能否有效避免水果在采摘过程中受到损伤直接关系到后期水果贮存成败,也直接关系到水果的经济价值。
近年来,部分学者对如何在机械采摘的过程中避免水果受到损伤进行了研究。例如,设计一款带有剪切功能的水果采摘机械装置将果实连着其枝条一同切断。在程伟等[4]的研究中,设计了一款仿生鹈鹕水果采摘机器人,主要的执行装置是R88R机械手,执行装置末端设置了一个控制嘴巴张合机构和一个收紧剪刀,通过剪刀作用将果实连同枝条一起采集,一定程度上避免了果实在正常采摘时受到拉压力作用而导致的损伤;在Zheng L等[5]的研究中,设计了一款便携式可伸缩高枝球状水果(柑橘、苹果等)采摘装置,通过伸缩机构来对柑橘、苹果等进行定位,然后通过控制器向致动器发出控制命令,致动器切断果茎,使果实落入采集机构,实现果实的采摘,在一定程度上避免了果实在人工采摘过程中所受到的拉拽损伤;王顺沩等[6]研究设计了一种便携式的水果采摘装置,主要执行过程是根据目视情况,按动控制电门,打开翻盖,将水果对准放置采摘机构当中。再按动控制电门,使得翻盖上的刀口剪断水果枝。水果剪落后,掉入剪切机构下方的长网兜当中,顺着长网兜滑落到收集篮中,这种设计不仅减少了果实在正常采摘时受到拉压力作用而导致的损伤,而且考虑到了果实的收集问题。以上针对如何保持水果在采摘过程中的完好性,都是通过设计一款将果实连同枝条一起切断的机械装置,在一定程度上避免了水果受到损伤,但是却没有考虑到结果枝条被切断后影响树形、树势,这很可能导致下一次果实产量受到极大的消极影响。
一些学者选择设计一款带有夹持抓取功能的水果采摘器。在庞国友[7]对手动背负夹爪式水果(梨)采摘器设计与试验研究中,通过水果采摘器样机对悬挂的梨进行定位夹持,然后将其采摘,通过对采摘对象的物理力学分析,得到采摘器的设计要求,极大程度上保证了果实在采摘过程中的完好性;在凌轩等[8]的研究中,主要描述了智能草莓采摘机器人设计及试验,该机器人通过机器视觉技术识别成熟草莓的位置然后对其进行定位,将其夹取,最后通过扭转将其采摘下来。该设计不仅可以识别出草莓成熟度,并且采摘过程中草莓的完整性保持较好。以上针对如何保持水果在采摘过程中的完好性都是通过设计一款带有夹持抓取功能的机械装置,在一定程度上避免了水果受到损伤。在庞国友的设计中其研究对象太过单一,仅对梨进行了物理力学分析,使用局限性太大;而在凌轩等的研究中仅仅针对如何识别草莓成熟度进行了较为详细的分析,而对在扭转时的扭转力并未进行详细分析,在一定程度上,草莓在采摘过程中受到损伤的可能性较大。
还有一些学者利用振动、吸摘的方法来设计机械装置;在Spann T M[9]的研究中,设计了一台由拖拉机牵引的树干振动器,并在各种柑橘上进行了试验,大大提高了采摘效率,一定程度上减少了果实在采摘过程中受到的损伤;在孙启民等[10]的研究中,设计了一款吸摘式水果采摘包装一体机,运用气泵设计齿轮组实现旋转吸摘器柔性摘取水果,大大降低损果率,提高采摘速度。以上针对如何避免水果在采摘过程中受到损伤,都是利用振动、吸摘的方法设计机械装置。在Spann T M的研究中,其试验对象在振动过程中大量树叶掉落并且树皮也有损伤;在孙启民等的研究中,利用吸摘虽然可以保证果实在采摘过程中的完好性,但是却未考虑到其吸嘴边缘锋利程度对水果表皮的损伤,并且未分析吸力。当下学者们针对如何保持果实在采摘过程中的完好性这一问题的研究尚有不足,因此有必要继续研究。
而针对如何保持果实在采摘过程中的完好性,利用机器手臂抓取的方法不失为一个好的采摘方法。利用抓取的方法采摘果实,尽量避免其表皮损伤,并且在保证一定完好性的前提下大大提高采摘效率。王红军等[11]采用抓取的方法设计出一款香蕉采摘机械手,并且对机构进行仿真,验证了此抓取机构的可行性。不仅在一定程度上避免了香蕉在采摘过程中的损伤,还大大提高了香蕉的采摘效率;王宜磊等[12]采用抓取的方法针对猕猴桃的采摘设计出一款四指抓取采摘机械手,并且对在采摘过程中的猕猴桃进行有限元分析,验证了采摘机械手的可行性。采用四指抓取减少了果实在采摘过程中的磨损带来的损伤。高国华等[13]基于黄瓜表皮的损伤对黄瓜采摘机械臂结构参数进行优化,在对黄瓜特性分析的过程中得到关键结构参数的最优取值,设计出一款无损黄瓜采摘机械臂,避免了黄瓜在采摘过程中受损的可能性。以上三位学者利用抓取采摘原理设计的机械装置或者是对采摘机构的进一步优化,都保证了果实在采摘过程中的完好性。而本文的研究对象苹果与香蕉、猕猴桃、黄瓜之间存在明显差异:首先,在形状上苹果是一个上下两头向里凹、中间稍鼓的类球形果实,而香蕉与黄瓜是长条状,猕猴桃与苹果形状类似但是其上下不向里凹;其次,在果实结构上,香蕉和猕猴桃与苹果相比较软,而黄瓜与苹果的果实结构大不相同;最后,在物理特性上,苹果果肉的密度、弹性模量、泊松比等力学指标与香蕉、猕猴桃、黄瓜之间大不相同。因此,将前面学者的研究方法直接用在本研究对象中,尚有不足。
本文设计了一款两指抓取苹果采摘机构,利用有限元方法分析机构末端夹持器接触时的苹果果实内部的应力变化,得到在达到果实破坏应力之前的抓取力范围,目的是为苹果采摘机构的设计及控制提供可以参考的数据。
1 材料与方法
1.1 研究材料
1.1.1 苹果各项参数
苹果的种类繁多,形状各不相同,但大多是类球形。常见的苹果种类有红富士、嘎拉、桑萨、红玉、蛇果、金冠、国光、乔纳金、青苹等,在国内的苹果主要是红富士。本文的研究对象就采用红富士苹果,红富士苹果高度一般在55 mm~80 mm之间,直径一般在55 mm~100 mm之间,质量通常为0.12 kg~0.24 kg[14]。苹果的物理参数如表1所示[15]。

表1 苹果的物理参数
1.1.2 两指抓取苹果采摘器末端手指尺寸
两指抓取苹果采摘器末端的抓取手指是弧口直径为90 mm,深度为20 mm的椭球面,其指面轮廓曲率半径为63 mm。
1.2 实验设计
1.2.1 苹果几何模型
在研究苹果的有限元模型时,虽然苹果果实主要由果皮、果肉和果核3部分组成,但是为了简化,本文将苹果果实假设为仅由果肉组织构成的均一模型[16],研究果实中的果肉部分受到抓取力时的应力状态。
根据已知苹果尺寸,利用SOLIDWORKS 2019软件建立苹果的3D模型,如图1所示,之后生成Ansys软件可以读取的IGS文件。
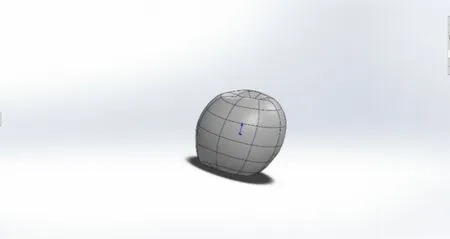
图1 苹果3D模型
1.2.2 抓取力分析
通过Ansys软件采用有限元方法模拟苹果在被抓取过程中的应力状态,两指抓取机构以不同的抓取力F沿接触面法线方向垂直作用。由于苹果赤道面轮廓曲率半径均小于指面轮廓曲率半径,所以两指与苹果面之间的接触为点接触。
红富士苹果的质量为0.12 kg~0.24 kg,苹果面与两指之间的摩擦系数为0.6。根据公式(1)[17],可以得到两指能够稳定抓取苹果的力至少在1 N~2 N之间。
本设计研制的两指抓取采摘器采用切断果梗的方式使果实分离,果梗处切断力如表2[14]所示。

表2 果梗处切断力
从表2中可得直径50 mm~100 mm的苹果切断需要的力大约在30 N左右,为保证抓取的稳定性,所以将抓取力F分别设置为5 N、10 N、20 N、30 N、40 N和50 N进行分析。
1.3 建立苹果有限元模型
建立苹果有限元模型时,作如下的简化假设:将苹果模型简化为仅由果肉组织构成的单一模型,将苹果组织简化为线性弹性材料。
1.3.1 苹果三维实体模型物理参数设置
将建立的苹果三维实体模型导入Ansys Workbench中,如图2所示。进入Model-mechanical界面,对苹果三维实体模型进行材料特性设置,如图3所示。

图2 Ansys Workbench中苹果三维实体模型
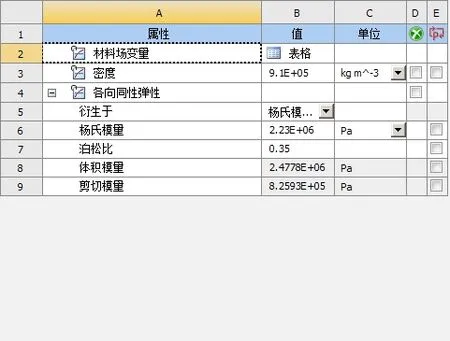
图3 苹果三维实体模型物理参数设置
1.3.2 苹果三维实体模型网格划分
由于建立的苹果三维实体模型是类球形,形状较为复杂,因此选择六面体主导法和面网格剖分的网格划分方式对苹果三维实体模型进行网格划分。根据苹果结构和材料的特点,设定苹果网格单元尺寸为3.5 mm。如图4所示。

图4 苹果三维实体模型网格划分
1.3.3 苹果三维实体模型边界条件设置
分析抓取力对苹果的应力状态时,定义苹果上部分为固定约束,如图5所示。
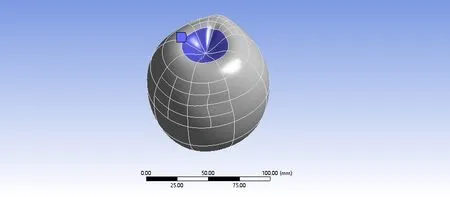
图5 边界条件设置
1.3.4 苹果三维实体模型所受抓取力设置
苹果所受抓取力的位置设在苹果赤道面两对称处,方向沿接触面法线方向垂直作用,如图6所示。
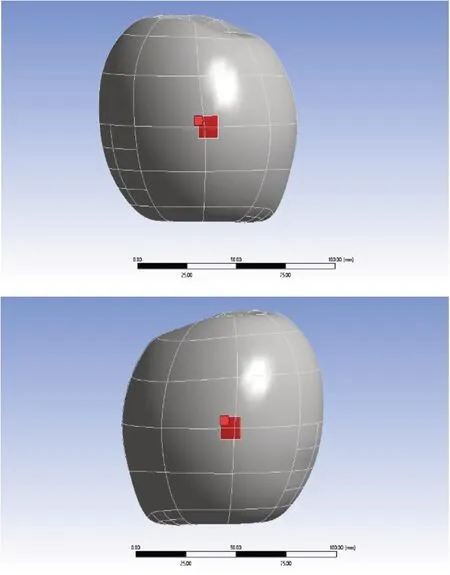
图6 苹果三维实体模型所受抓取力设置
2 结果与讨论
2.1 结果
对苹果施加6种沿苹果与手指接触面法线方向垂直作用的抓取力,分别得到苹果内部组织的应力云图,如图7所示。从图中可以看出,随着抓取力的增大,苹果的最大、最小应力也随之增大。同时,苹果与手指的接触点处的应力最大,而四周的组织离接触点越远的位置应力越小,说明苹果与手指的接触点处最容易受到损伤。
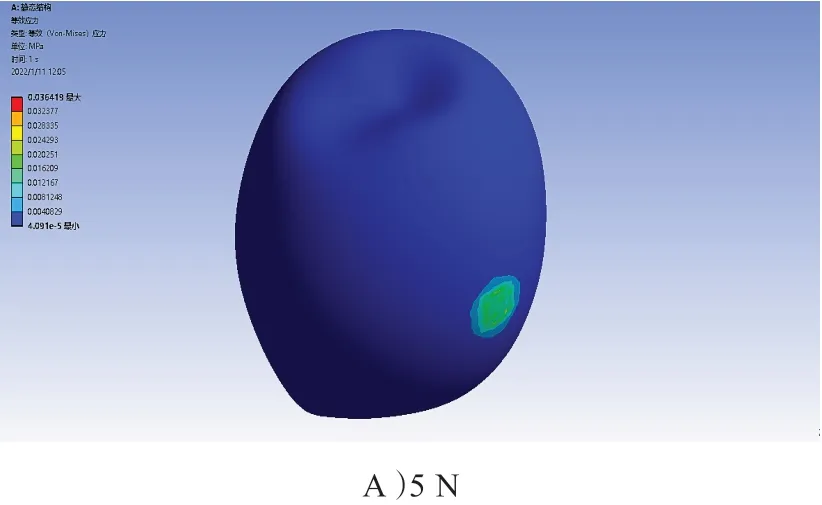
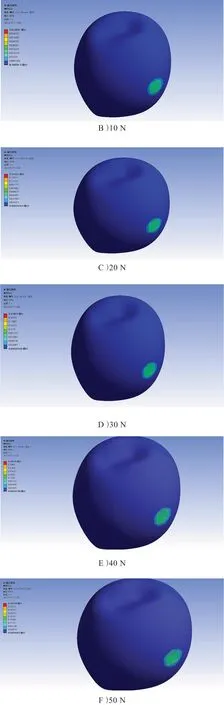
图7 苹果所受抓取力大小及应力云图
根据应力云图得到苹果受到不同抓取力时的最大应力,如表3所示。当抓取力为5 N、10 N、20 N、30 N时,苹果所受的最大应力为0.036 419 MPa、0.072 837 MPa、0.145 67 MPa和0.218 51 MPa,而苹果果肉组织的破坏应力为0.31 MPa,此时苹果所受的最大应力都小于苹果的破坏应力,不会对苹果造成机械损伤;当抓取力为40 N时,苹果所受的最大应力为0.291 35 MPa,此时也不会对苹果造成机械损伤;但当抓取力为50 N时,此时苹果所受的最大应力为0.361 49 MPa,此时的最大应力已经超过苹果自身的破坏应力,果肉受到机械损伤。说明使得苹果达到破坏应力的抓取力应在40 N~50 N之间,为此设置在40 N~50 N之间的不同抓取力进行进一步的研究。
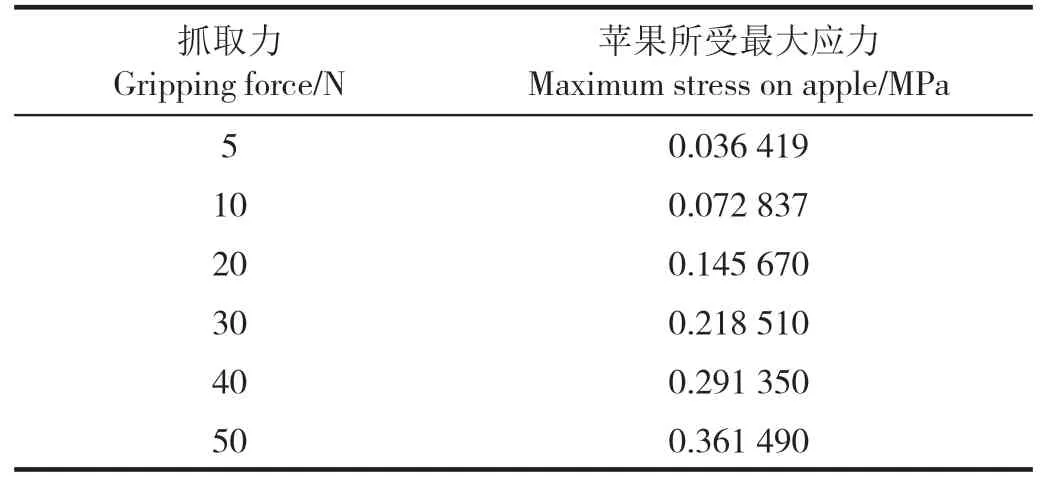
表3 苹果受到不同抓取力时的最大应力
将抓取力的大小改为45 N得到的应力云图如图8所示,此时苹果所受的最大应力为0.327 77 MPa,大于苹果的破坏应力0.31 MPa,苹果会受到机械损伤。
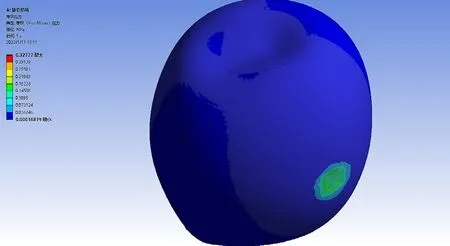
图8 苹果所受抓取力为45 N时的应力云图
将抓取力的大小改为43 N得到的应力云图如图9所示,此时苹果所受的最大应力为0.313 2 MPa,略大于苹果的破坏应力0.31 MPa,苹果会受到机械损伤。

图9 苹果所受抓取力为43 N时的应力云图
将抓取力的大小改为42 N得到的应力云图如图10所示,此时苹果所受的最大应力为0.305 92 MPa,接近苹果的破坏应力0.31 MPa,苹果并未受到机械损伤但是极易受到损伤。

图10 苹果所受抓取力为42 N时的应力云图
2.2 讨论
对两指抓取苹果采摘器与苹果接触过程的有限元分析研究,可以为采摘收获装置的设计和抓取方法的制定提供一定的参考依据。但研究过程中,由于将黏弹性的苹果组织简化为线性弹性材料,以及将苹果果实假设为仅由果肉组织构成的均一模型,可能导致性能参数和建模存在误差,使得仿真分析中存在一定不足,同时,两指抓取苹果采摘器的抓取性能也有待于通过试验来进一步比较验证。
3 结论
本文对苹果与两指抓取苹果采摘器末端夹持器接触时的果实内部组织应力变化进行研究。采用Ansys软件建立了由果肉组织构成的苹果有限元模型,通过苹果与手指的加载接触试验,设置5 N ~50 N共6组不同大小的抓取力得到苹果相对应的应力云图。最后又设置45 N、43 N和42 N三组不同抓取力,从而得到苹果所受的最大应力接近其破坏应力时的抓取力大小。
1)苹果与手指接触处的应力最大,当抓取力小于42 N时,两指作用于苹果的应力都小于苹果果肉组织的破坏应力,不会对苹果造成损伤;
2)当抓取力等于42 N时,苹果所受到的最大应力已非常接近其破坏应力,此时苹果极易受到机械损伤。
