预见控制理论分类及其研究进展
2022-03-17姚明骐刘文盛赵磊米俊锋
姚明骐,刘文盛,赵磊,米俊锋
(辽宁石油化工大学石油天然气工程学院,辽宁抚顺,113001)
0 引言
预见控制在人们的科技发展和生产生活中具有重要的作用,比如飞行控制、自动车辆导航、制造控制、机器人技术以及信号处理等方面。预见控制由一组广泛的方法组成,这些方法用于解决跟踪和拒绝问题,假设要跟踪或拒绝的信号在一定的时间内是可用的。大量的文献表明了预见控制理论的重要性和实用性。预见控制的广泛适用性背后的原因是它利用干扰或参考的未来信息来提高干扰抑制或跟踪的质量。因此,由于在控制器设计中提供了额外的自由度(DOF),预见控制器的性能超出了普通的仅通过反馈控制设计所能达到的水平。参考/干扰信号的感知,在一个特定的时间间隔足够一个双自由度控制器完成几乎所有可能的改进。然而,系统的闭环灵敏度、稳定性和鲁棒性完全取决于控制的反馈部分。实际上,利用被跟踪或拒绝的信号作为预见信息,在理论上定义得很好,但是由于不可避免的卷积轮廓的截断,导致跟踪或拒绝信号的错误,因此在实践中无法实现。另外,预见控制元件仅利用信号的有限预见信息,因此,根据所选的基本函数,可以在保证最小误差的情况下实现。预见控制作用的概念已经在文献中通过不同的控制理论公式进行了讨论,将具有一定时间延伸性的预见控制问题分类为预见控制问题。
众所周知,每个系统都有一定的限制或约束,适当地利用信号的附加信息或预见信息可以避免这些限制或约束。因此,预见控制领域因其在不同领域的应用而吸引了研究人员和科学家。预见控制的历史可以追溯到1966年提出的三种预见控制模型[1],1971-1980年预见控制提出动态程序设计方式[2],1981-1990年提出将最优控制理论应用到预见控制问题中[3],1991-2000年开始将控制理论应用于预见优化问题,即统一的H2−H∞设计和基于线性矩阵不等式(LMI)的设计[4-5]。2000到2010年,学者们通过其他方法改进了最优化方法和鲁棒控制理论在预见控制问题的应用,如基于模糊设计、频域设计、离散线性时不变系统设计等[6-8]。2010年至今提出了新结构,对系统的广义化的最优化和鲁棒控制理论[9-10]。本文描述了预见控制理论的发展进程,并概述了众多学者在预见控制领域所做的贡献,并从理论出发,将学者们的研究成果按照不同方式进行分类。
1 预见控制理论
大量的文献表明了预见控制理论的重要性和实用性。预见控制的广泛适用性背后的原因是它利用干扰或参考的未来信息来提高干扰抑制或跟踪的质量。因此,在控制器设计中进行增广,预见控制的性能超出了通常仅通过反馈控制设计所能达到的水平。现有的研究中离散系统预见控制的设计偏多,这是由于离散时间中的延迟元是有限维的,因此在离散系统中采用预见控制的设计是比较理想的,所以本文提出一个离散系统的预见控制描述。
定义一个离散系统状态空间模型:
其中 x ( t)∈ Rn、y( t)∈ Rp和 u ( t)∈ Rm分别为状态向量、输出向量、控制输入,A, B, C, D为常数矩阵。预见控制问题的目标是在给定参考信号和干扰信号的前提下,找到一个使被控输出功率最小的控制器,使得跟踪误差较小,其中跟踪误差由下式表示:

其中,r( t)表示外生信号(参考信号和/或干扰信号)和当前系统状态的未来值。
将系统模型转换为标准格式,使性能指标成为系统模型的一部分。选择二次性能指标:

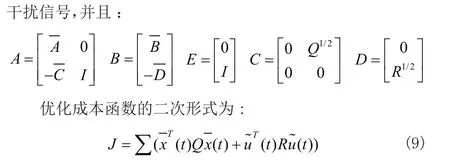
其中Q是一个半正定矩阵。参数Q和R的取值取决于设计偏好和大量的测试实验。预见控制问题第一个解决算法是基于动态规划[2],但是其消耗时间长并且不能够直接包含控制性能参数,因此预见控制的研究方法转向标准控制理论。
2 预见控制的分类
预见控制问题,简而言之,就是一个优化问题,即确定控制器的最优值,这使得预见控制理论转变成一个可解决的标准优化和控制器设计问题。本文根据不同的控制解决方法将预见控制研究分为以下几类。
2.1 根据时间域
根据系统运行的时间域来考虑,分为连续时间系统和离散时间系统的预见控制。连续时间系统控制器是在连续时域中得到的,预见动作在一段时间间隔内出现,因此,预见长度以时间为单位,通常以秒为单位。任祯琴[11]研究了广义连续时间系统预见控制问题,连续时间预见控制在实际应用中也有许多研究,Wong等人[12]还将模糊预见控制用于半车模型的连续域性能优化。连续时间系统预见控制器优点是输出不需要任何中间环节就可以直接输入到实际系统中。
离散时间系统预见控制由于预见动作是以时间步长表示的,因此控制器的设计方法需要离散时域公式,采样时间定义了每个时间步长,预见控制适用于各种应用场合的离散域扰动抑制和跟踪。Liao等人[13]分析了具有多速率设置的线性广义离散系统的预见控制问题。Kristalny等人[14]研究了离散域风力机塔的预见控制设计。由于离散时间中的延迟元是有限维的,在离散域内采用预见控制的设计是比较理想的并且不需要改变问题的框架。因此,与连续时间问题相比,预见控制问题的离散时间公式更简单。
2.2 根据方法域
根据方法域,预见控制器的求解方法分为两类:时域方法和频域方法。本文只介绍了无约束环境下的预见控制设计问题。由于实际设计问题对因变量和自变量都有约束,因此设计过程可以扩展或改进来包含约束。此外,约束可能在不同的领域,例如,时域或频域。考虑到这一点,设计方法可以灵活地同时包含来自不同领域的约束。时域方法介绍了系统的误差信号、峰值超调、稳定时间和控制信号等时域特性,是一种基于时间模型和设计问题来优化控制器的时域特性设计。采用基于时间域的方法的预见控制器设计,是通过设计过程直接针对系统的瞬态响应而制定的。可用信号的预见信息是相对于时间的,而不是相对于频率的。因此,基于时间域的设计方法在不改变可用的预见信息格式的情况下,兼容用于设计目的的信号预见信息的使用。Gershon等人[15]针对连续时不变时滞系统的随机参数不确定性的预见控制进行了研究,Liao等人[13]采用离散时间提升技术解决了广义线性离散时间系统的多速率设置问题。利用该方法的优点在于利用标准信号易于分析,从而获得了瞬态响应。
频域方法是利用频域技术和模型对控制器进行了优化设计,该设计方法能够在频域上呈现出系统的特性。Kristalny等人[14]提出了一种基于频率域的预览控制解决方案,该方案的有点在于所构建的方程不依赖于预见长度。并应用在实际中,将该方法推广到问题的求解中,给出了风力发电机组塔的变形模型。对于频率响应比瞬态响应更需要分析的系统,这种域方法更有用。
3 结论
本文对预见控制进行了全面的文献综述,本文将可用于预见控制的工作分为时间域和方法域两类,介绍了预见控制理论。最后得出结论在经典的设计方法中,基于最优和鲁棒控制理论的设计方法是最受欢迎和研究的领域。由于增广系统与经典的最优和鲁棒控制设计方法兼容,因此大多数研究人员采用经典的最优和鲁棒控制设计方法来设计预见控制。现有的研究中离散系统预见控制的设计偏多,这是由于离散时间中的延迟元是有限维的,因此在离散系统中采用预见控制的设计是比较理想的。此外,离散域的设计方法可以很容易地应用于带有预见信息的系统,而不需要改变问题的框架。并且相比较于连续时间系统的设计方法,离散时间系统的公式更为简单。时域设计方法能够很好的分析并得到瞬态响应,但是对于频率响应比瞬态响应更需要分析的系统,频域方法就更为合适。
