磁耦合谐振式无线电能传输技术在电力系统中的应用
2022-03-17江炳蔚魏斌何浩蒋成吴晓康
江炳蔚,魏斌,何浩,蒋成,吴晓康
(中国电力科学研究院有限公司,北京市 海淀区 100192)
0 引言
无线电能传输(wireless power transfer,WPT)技术指的是利用磁场、电场、微波、激光等媒介,采用非接触的方式进行电能传输的一种技术。无线电能传输技术无需在供电端与受电端之间连接电缆,提升了设备的灵活性与安全性,在矿井、水下等场景下有着广阔的应用前景。在这些无线电能传输技术中,磁耦合谐振式无线电能传输技术发展较为成熟,应用较为广泛。
为应对互联大电网的发展方向,当前电力系统正趋向无人化、智能化发展[1-5]。其中明显变化是智能电力巡检设备的使用,例如变电站巡检机器人[6]、电力线路巡检无人机[7]等。受限于目前电池与储能技术,续航问题一直是限制智能化设备发展的瓶颈。传统“有线供电+蓄电池”的供电方式不仅限制了设备的使用半径,且充电时容易产生接触火花,易引起安全事故。因此考虑将磁耦合谐振式无线电能传输技术应用于电力系统中,解决电力系统智能化设备的无线供电问题。
从交流电之父特斯拉开始,人类对于无线电能传输的研究从未停止,吸引了来自新西兰奥克兰大学、美国麻省理工学院、韩国科学技术研究院等国外研学者,以及重庆大学、哈尔滨工业大学、东南大学、西南交通大学、中国科学院大学、中国电力科学研究院等国内研究团队对磁耦合谐振式无线电能传输技术的进一步研究[8]。
在国内外的相关文献中,磁耦合谐振式无线电能传输技术也被称为感应式无线电能传输技术。该技术利用高频电磁场进行电能传输,具有传输距离远,抗偏移性能好、环境适应性强等特点,在电动汽车、巡检机器人、巡检无人机等电力系统智能化设备中应用场景广泛。经过近几年的发展,磁耦合谐振式无线电能传输技术从短距离(几十毫米级)、小功率(百瓦级)开始,已经发展到中距离(几百毫米级)、中功率(10 kW级)阶段,在传输距离和传输功率上已经能满足多种无线电能传输应用的需求。
本文对磁耦合谐振式无线电能传输技术在电力系统中的应用进行简要介绍,在对比归纳总结现阶段的研究成果的基础上,分析技术的发展趋势,并对今后的研究方向提出建议。
1 磁耦合谐振式无线电能传输技术概述
磁耦合谐振式无线电能传输依据电磁感应原理,其电能传输具有一定的导向性,且能够穿过非铁磁性物体传播[9]。磁耦合谐振式无线电能传输系统主要包括发射端整流电路、逆变电路、发射端谐振补偿电路、磁耦合线圈、接收端补偿电路、接收端整流电路、负载和控制电路等。
1.1 磁耦合线圈
在线圈的传输过程中,由于漏磁的存在,会导致传输效率的下降。通常在线圈中加入铁氧体材料,来约束传输线圈之间的磁路路径,提高线圈之间的耦合系数。常见的线圈有圆形、矩形、双D形,如图1所示。
圆形与矩形线圈由于结构简单,制造较为容易,是常见且应用较为广泛的线圈形状。线圈的形状决定了其应用场景,一般来说,圆形线圈用于接收端,矩形线圈用于发射端[10-11]。而双D形线圈空间中的磁感应强度整体较大,有利于能量的传输,一般应用于发射端。双D 形线圈漏磁要比圆形和矩形线圈小,文献[12]中介绍了一种DDQ线圈,如图2 所示,与双D 形线圈相比,漏磁更小,对系统效率提升具有重要的意义,但相较其他类型线圈而言,结构稍显复杂,制作成本较高。

图2 DDQ线圈结构图Fig.2 Structure of DDQ coil
1.2 谐振网络
谐振电路是磁耦合谐振式无线电能传输系统中控制谐振频率的部分,磁耦合谐振式无线电能传输系统的发射端和接收端都设置有谐振电路,处于磁耦合状态发射端和接收端的谐振电路在同一特定频率下都发生谐振。谐振电路拓扑多种多样,4 种基本形式分别为串-串(S-S)型、串-并(SP)型、并-串(P-S)型、并-并(P-P)型[13-14]。不同谐振拓扑输出电压电流特性如表1 所示,其中U为WPT系统输入电压,M为原副边磁耦合机构的互感,ω为系统谐振角频率,L2为接收端磁耦合机构自感,RL为等效负载。
从表1 可以看出,接收端的谐振电路拓扑决定了无线电能传输系统的输出特性。接收端谐振拓扑为串联型,输出特性为恒流源特性;谐振拓扑为并联型,输出特性为恒压源。

表1 不同谐振拓扑输出电压电流特性Tab.1 Output voltage and current characteristics of different resonant topologies
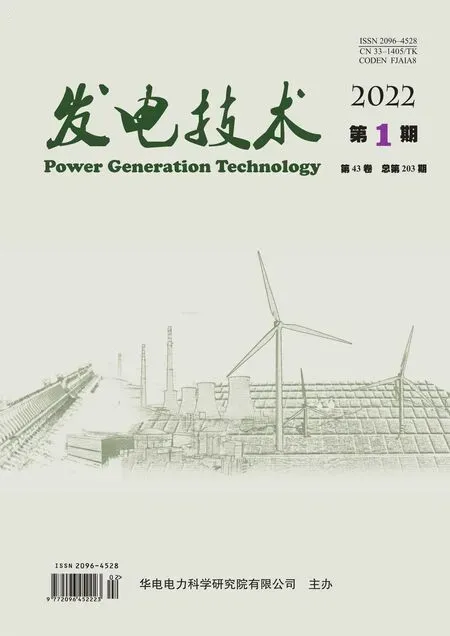
除了4种基本拓扑外,还存在LCL型、LCC型等复合型拓扑,如图3 所示。LCL 型拓扑能实现输出电流与负载的解耦,同时避免二次侧发生短路故障时对一次侧造成的过电流问题。LCC 型拓扑可以隔离电源侧的直流分量,避免传输线圈的直流磁化[15-16]。
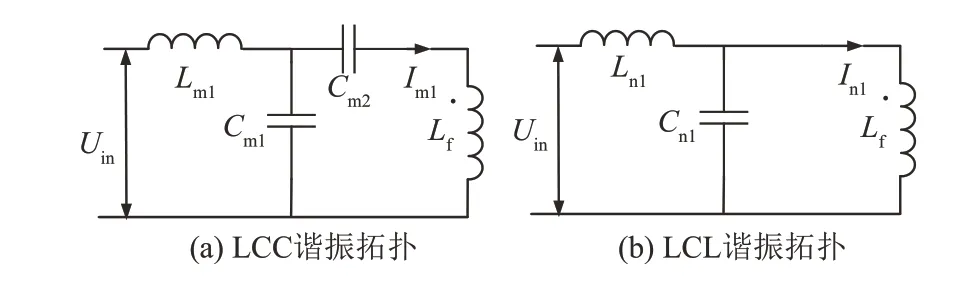
图3 谐振拓扑Fig.3 Resonant topology of WPT
在选择补偿电路拓扑时,要综合考虑系统的实际需求,选择适合的补偿电路。
2 电动汽车无线充电技术
2.1 电动汽车无线充电模型
近几年,电动汽车(electric vehicle,EV)迅速发展,其与电网之间的互动越发密切。目前电动汽车充电时与电网之间大多采用有线连接方式,充电枪的频繁拔插容易引起接触火花和拉弧,导致事故。为解决这一问题,研究出电动汽车无线充电技术(electric vehicle wireless charging technology,EVWCT),如图4所示。

图4 电动汽车无线充电模型Fig.4 Model of EVWCT
2.2 系统基本结构
总体上看,EVWCT 的电路拓扑与基本的磁耦合谐振式无线电能传输拓扑相差不大,但在某些细节方面尚未形成统一标准。
在谐振电路的选择上,文献[17]根据电池的充电曲线对车载端谐振拓扑改进,在充电的不同时间采用不同的谐振拓扑。该方法符合电池充电规律,保护电池寿命。
系统的控制方式分为单边控制和双边控制[18]。文献[19-20]给出一种双边控制的方案,车载端实现对输出电流的控制,地面端实现对线圈电流的控制。文献[21]建立EVWCT动态解耦控制系统数学模型,通过计算因子实现解耦占空比对充电功率的控制。这2 种控制方案从电路模型和数学模型2 个角度实现对充电功率的控制,双边控制方案为双向无线电能传输提供了一定的理论基础,成为V2G的理论依据。
为保证EVWCT 的安全运行,减少对生物与环境的影响,系统中应该包含4 项辅助功能:金属异物检测、生物体检测[22]、引导入位以及偏移检测[23]。文献[24-27]对辅助功能进行深入研究,主要依靠热释电传感器、红外传感器、温度传感器等器件的有效配合,构成EVWCT 的辅助检测系统。
2.3 电磁辐射
WPT产生的高频磁场会对周围的环境产生一定量的电磁辐射,作为一项民用技术,必须解决电动汽车无线充电电磁辐射对使用者的影响。
文献[28]在仿真软件COMSOL 中对人体进行建模,分析人体各部分遭受电磁辐射的影响程度,如图5 所示,研究表明电磁辐射对肺部的影响最大。研究[29-31]发现,电动汽车在进行无线充电时,车内的电磁辐射水平均在国际标准规定的辐射值以下,符合国际标准。
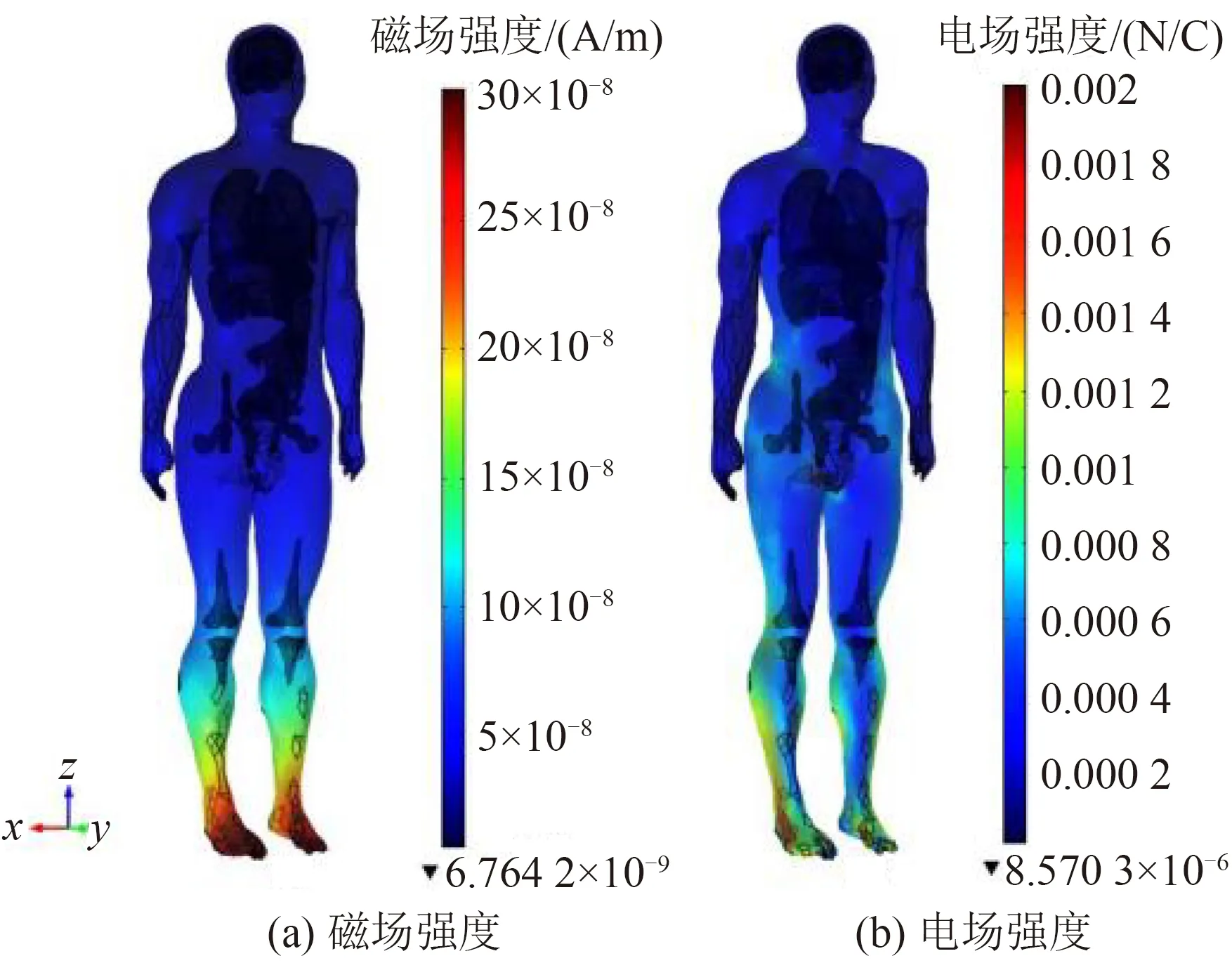
图5 无线充电车内人体器官磁场与电场强度图Fig.5 Intensity diagram of magnetic field and electric field of human organs in wireless charging vehicle
2.4 无线充电效率
无线充电效率是影响电动汽车无线充电表现的一个重要参数。在电动汽车无线充电系统中,电力电子装置的损耗、线圈内阻以及线圈之间的传输损耗是影响充电效率的重要原因。
在国家标准中,规定电动汽车无线充电的效率不低于85%,目前在实验室的条件下,电动汽车无线充电的效率最高可达94%。文献[27]采用数学模型变换,探讨了系统电能传输效率关系,通过改变接收线圈之间的距离,减少动态无线充电系统中的漏磁,提升了电动汽车无线充电系统的效率。文献[32]中设计了高效率E 类逆变电源,E 类逆变器结构中具有谐振电路,使开关管易实现零电压导通,能够实现较高的充电效率。
因此,通过控制电力电子装置的损耗,增加传输线圈之间的耦合程度,能够进一步提升无线充电系统的充电效率,实现高效率的电动汽车无线充电。
2.5 无线V2G技术
普通的EVWCT 中能量由电网单向传输到EV,但随着智能配电网相关技术的发展,EV 与电网之间可实现功率的互动。车到网(vehicle to grid,V2G)利用电网调控技术将EV并入电网,可在低用电负荷时,将电能传输给闲置电动汽车;在高用电负荷时,把电能从电动汽车回馈到电网,提升电网供配电系统的灵活性和电能的有效利用[33-35]。典型无线V2G电路拓扑如图6所示。
图6 无线V2G电路拓扑图Fig.6 Circuit topology of wireless V2G
文献[36-37]提出了基于模糊控制的改进比例谐振控制技术,提高V2G 系统的静态和动态性能。文献[38-39]从实际电网结构出发,建立微电网模型,研究V2G电动汽车并网后的使用场景和对电网的影响。
EVWCT 与无线V2G 技术实现了电网与电动汽车之间的良好交互。EVWCT 的研究主要集中于提升无线充电的效率和功率,无线V2G的研究集中于双边逆变器的控制,例如多电平逆变装置。
2.6 工程化应用
中国电力科学研究院在国家电网科技项目的支持下,在河北省张北县建设了电动汽车无线充电系统试验段。试验段全长数百米,包括直道、弯道、特殊路段等共7段移动式无线供电导轨,2段静态充电位、电力变换单元和监控设备,如图7所示。该系统以工程化、模块化为设计主导思想,设计了新型“工”字型导轨线圈,提高系统的抗偏移特性与充电效率的稳定性。系统在受电端为规避单相受电端结构存在的功率传输零点问题,设计了双相DQ 结构,采用上下堆叠结构,保证移动式无线充电系统中能量传输的稳定性。
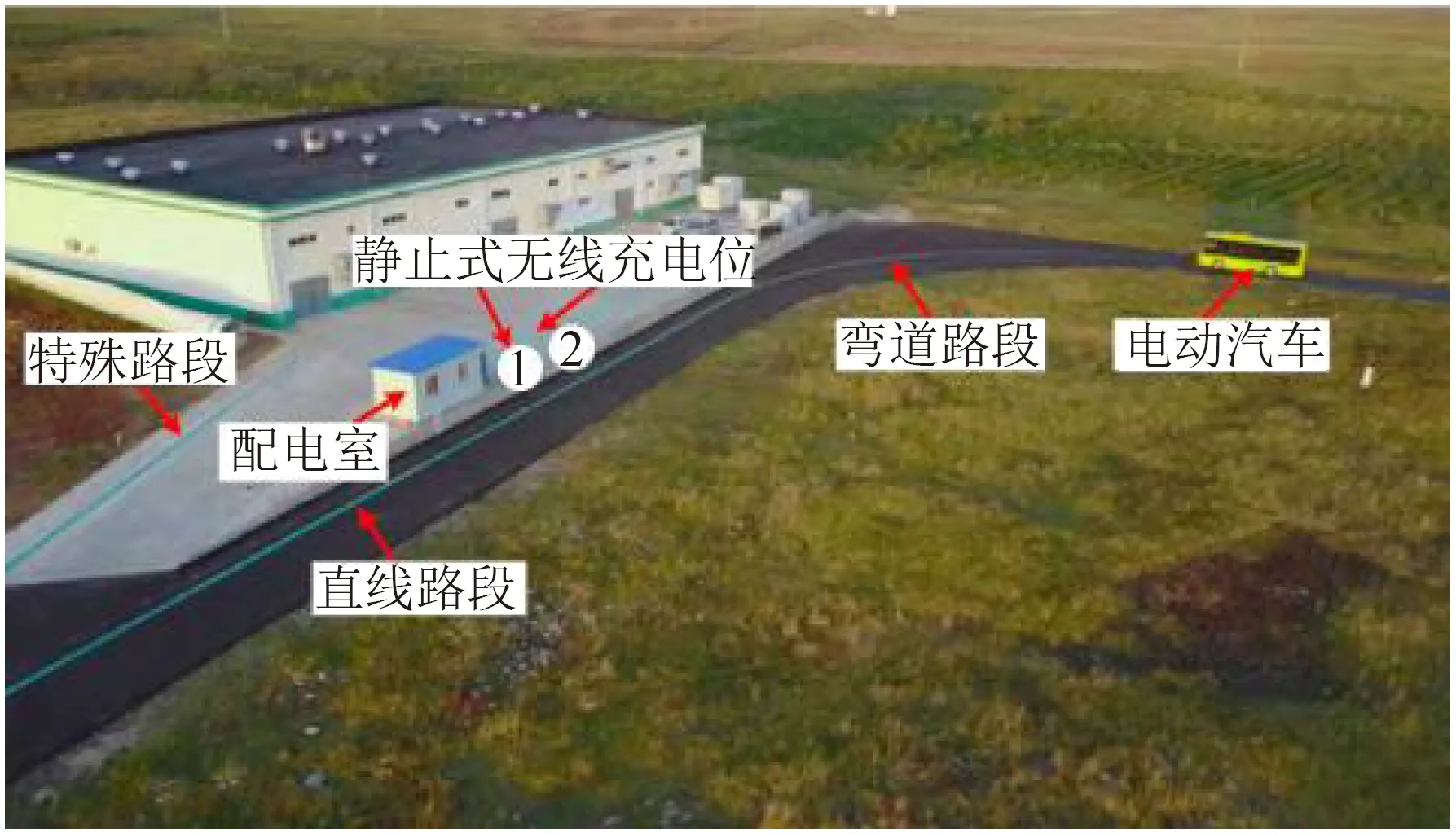
图7 无线充电系统试验段鸟瞰图Fig.7 Aerial view of wireless charging system
试验段包括了一段常规移动式无线充电路段、一段移动式无线充电特殊路段以及2 个静止式无线充电车位。车辆改装自宇通6805客车,无线充电额定功率为20 kW,无线充电频率为20 kHz,移动式无线充电最高速度为60 km/h.
经过测试得出,在车辆行驶速度为40 km/h的情况下,系统总体效率维持在76%,车辆的行驶速度每增加10 km/h,系统效率下降约1%。经测量,车内磁场强度为0.55 A/m,远小于国际标准限值。
3 变电站巡检机器人无线充电系统
随着变电站规模的逐渐扩大以及变电站无人值班制度的实行,变电站巡检机器人投入使用。变电站巡检机器人按照预先设定的轨迹自动对变电站进行巡检,辅助运维人员掌握变电站的工作状况。
变电站巡检机器人充电方式大多为接触式充电。接触式充电方式需要较高的精确性来完成对接,频繁地对接、脱离容易造成插头磨损,导致接触不良。变电站巡检机器人在工作6 h后,需返回充电,充电时间达8 h[40]。在巡检期间需要对机器人进行多次充电,严重占用巡检机器人工作时间[41-42]。
3.1 系统基本结构
电力巡检机器人无线充电系统采用动态无线充电方式,其中的一种结构是将传统的两线圈式改造为四线圈式,即在发射线圈和接收线圈之间加入了2 个中继线圈,增加传输距离,如图8所示。
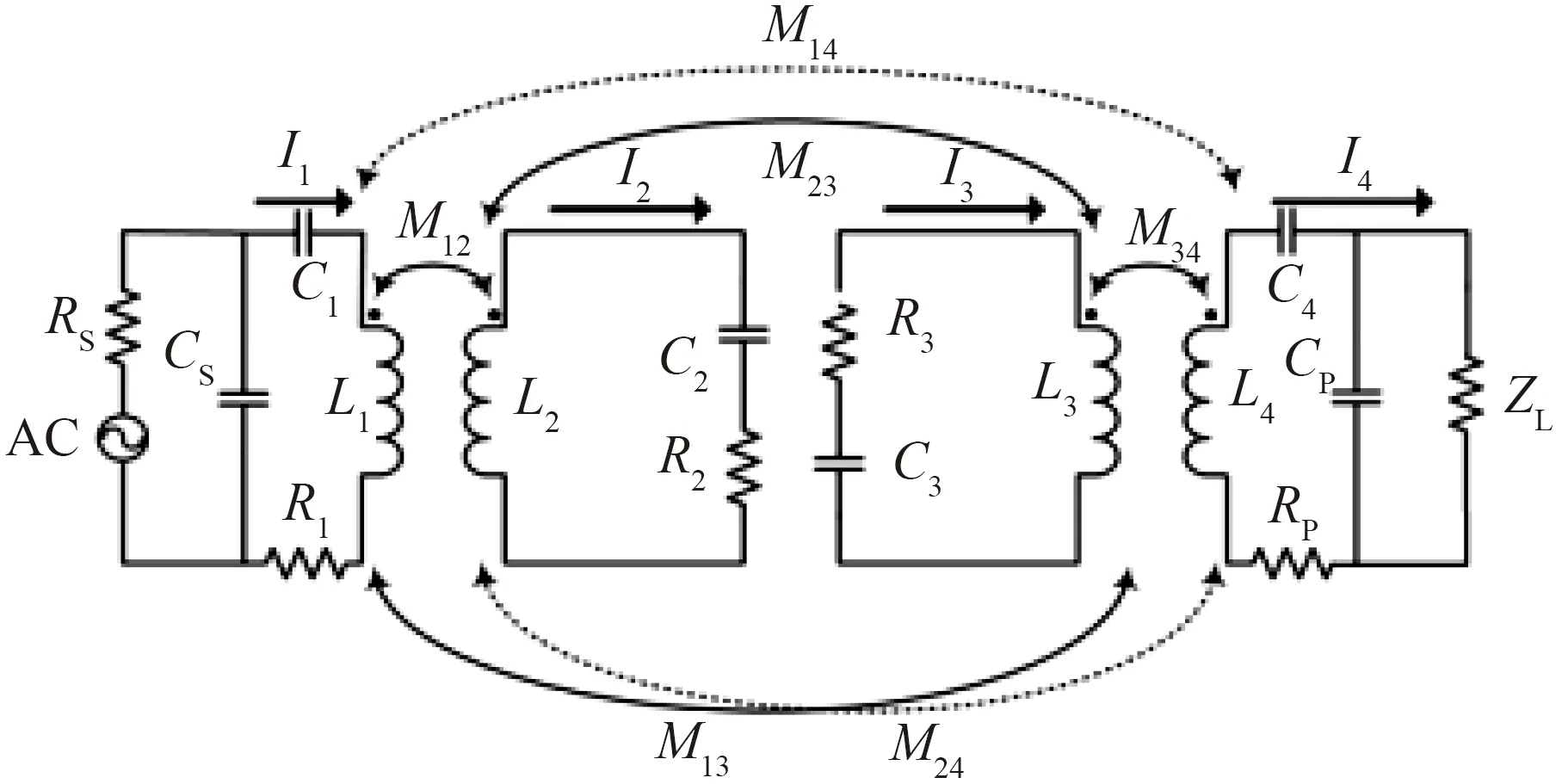
图8 电力巡检机器人无线充电系统电路拓扑Fig.8 Circuit topology of wireless charging system for electric inspection robot
在无线电能传输系统中,要求原边与副边线圈尽量对准,但对于电力巡检机器人来说精度并不能满足要求。文献[40]设计了双层矩阵式线圈供电阵列,矩阵式线圈提升了系统的抗偏移特性,双层设计避免了磁场分布不均的情况,使得功率传输更加稳定,如图9所示。

图9 双层矩阵式线圈Fig.9 Double layer matrix coil
除了保证发射线圈与接收线圈之间的耦合外,针对电力巡检机器人的强磁场工作环境,需要减少设备之间的电磁干扰。文献[28]采用主动屏蔽的方式,设置一个与发射线圈和接收线圈同时耦合的无功线圈,如图10所示。当漏磁通穿过谐振式无功线圈时,产生的反向磁通将漏磁通削弱至较小值。
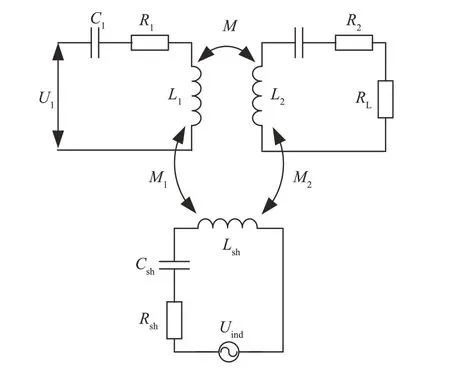
图10 谐振式无功屏蔽线圈电路拓扑Fig.10 Circuit topology of resonant reactive shielding coil
3.2 系统控制方案
变电站巡检机器人无线充电系统主要是对逆变器和发射线圈的切换进行精确控制。
逆变器控制的核心在于零电压开关(zero voltage switch,ZVS)的控制。文献[43]改变谐振电路的参数,使其略呈感性,保证ZVS的顺利进行。但略呈感性的谐振电路会使得开关损耗变大,增加系统的无功功率。文献[44]在逆变电路中采用GaN 器件并设计对称分裂电感电容支路,如图11所示,在提高系统频率的同时也能够保证ZVS的进行。但是GaN器件成本较高,经济性不好。以上方案均在低电磁干扰的环境下适用,而在强电磁干扰环境下的逆变器可靠控制方案还有待进一步研究。

图11 对称分裂电感电容电路拓扑Fig.11 Topology of symmetrical split inductor capacitor circuit
为了满足变电站巡检机器人“不停站”充电的要求,必须采用动态无线电能传输技术,因此需要研究线圈之间的切换问题。文献[27]采用双激励单元,依据算法计算出接收线圈位置,开通相应位置的发射线圈。文献[45]将多个发射线圈连接到同一个逆变器上,减少了逆变器的重复布置,但对逆变器的性能要求较高。文献[46]在机器人前部、后部各安装了接收线圈,保证切换过程中平滑供电,如图12所示,此方案对线圈安装位置的精确度要求较高。
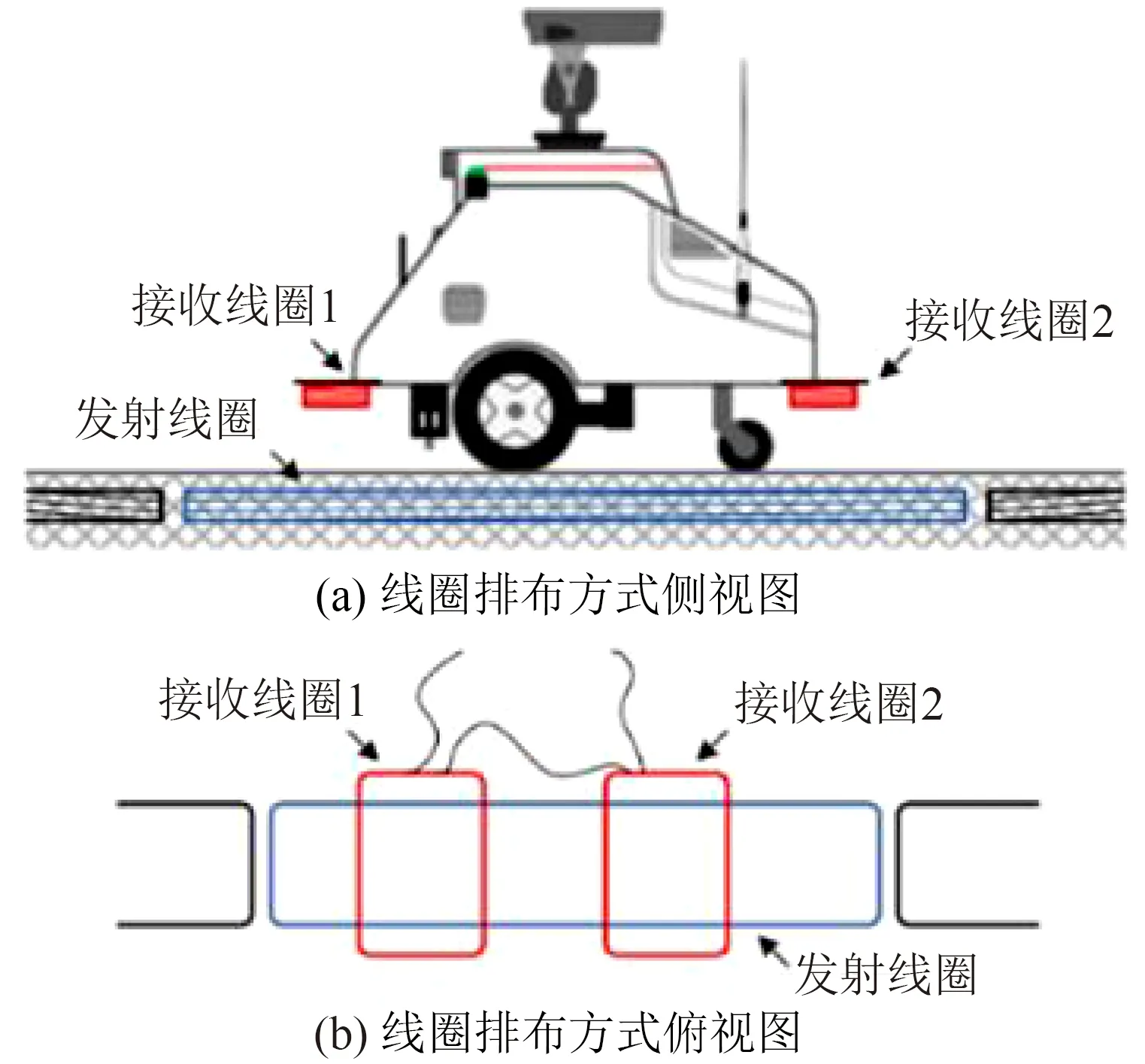
图12 安装双接收线圈的变电站巡检机器人Fig.12 Substation inspection robot with double receiving coils
以上控制方案通过采用GaN 电力电子器件,调整接收线圈与发射线圈之间的位置关系,能够提升巡检机器人无线充电系统的效率。
3.3 工程化应用
中国电力科学研究院牵头国家电网科技项目《适用于变电站巡检机器人的非对称耦合谐振系统研究》,项目中考虑到110 kV 及以上变电站的工频高压电场,模拟了样机所在变电站中强电磁环境,分析搭载无线充电系统的变电站巡检机器人在强磁场情况下的适应性。
项目设计了基于多线圈矩阵网络分布的无线充电系统,采用交错双层式矩阵线圈叠加的方式,使得发射平面具有较为均匀的磁场强度分布。无论巡检机器人以何种方向停在充电区域的何处位置,都能进行高效率的无线充电,如图13所示。

图13 变电站巡检机器人无线充电系统示意图Fig.13 Schematic diagram of wireless charging system for substation inspection robot
项目研究了非对称条件下耦合线圈的传输情况,测量不同供电端矩阵排布线圈与受电线圈的能量传输性能,如平行矩阵式排布与交错矩阵式排布等。设计匹配供电端供电线圈阵列的巡检机器人充电线圈的结构、尺寸等参数,选取的供电线圈阵列为4×4圆角方形螺旋线圈阵列,供电线圈尺寸选为60 mm×60 mm,线匝宽度为20 mm,线圈间间距为10 mm。分别选择与供电线圈完全相同的圆角方形螺旋线圈,以及外径为125 mm(单个供电线圈尺寸的2倍,正好覆盖4 个小的供电线圈),线匝宽度为30 mm 的圆角方形螺旋线圈作为巡检机器人受电线圈。研究采用了高阶谐振补偿网络一般模型、非对称耦合结构网络补偿方式等关键参数对无线充电系统能效特性影响关系,最终优化谐振补偿网络参数。实际现场运行如图14所示。

图14 变电站巡检机器人无线充电系统现场图Fig.14 Field diagram of wireless charging system of substation patrol robot
4 线路巡检无人机无线充电技术
电网需要定期对电力线路进行巡视检查,在线路长、地理环境复杂时,一般采用无人机(unmanned aerial vehicle,UAV)对线路进行巡检工作。线路巡检无人机的蓄电池并不大,导致无人机单次巡检距离较短[47-49],这样的巡检距离难以满足远距离输电线路巡检需求[48]。
线路巡检无人机无线充电系统将充电平台安装在输电杆塔上,在巡检过程中对巡检无人机及时进行电能补充。
4.1 系统基本结构
相比于普通无线充电的耦合装置来说,无人机对接收端耦合装置的体积与重量有严格要求,文献[49]中将耦合装置放置在无人机起落架底端,如图15 所示,但小的气隙容易引起耦合装置对非对准情况的过度敏感。因此,文献[49]中也提出了适用于无人机的双极性耦合装置,如图16 所示。相反的电流走向使得发射线圈内部磁场有2 个方向,磁场具有双极性特性,提高了耦合能力,降低了漏磁。
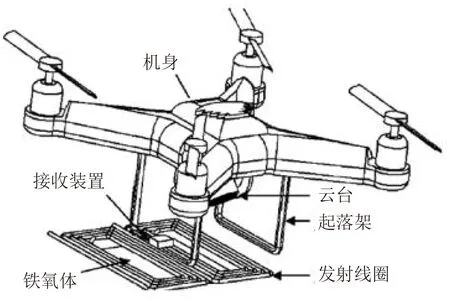
图15 巡检无人机线圈布置示意图Fig.15 Coils layout of UAV
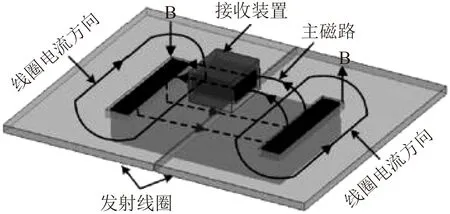
图16 无线充电平台耦合装置磁路Fig.16 Magnetic circuit of coupling device of wireless charging platform
为了确保无人机平稳准确地停在无线充电平台上,需要在无人机和充电平台之间建立识别机制,辅助无人机准确停靠在充电区域。文献[47]提出的解决方案是利用Zigbee无线通信辅助无人机定位,这种方案可行性较高,但易受干扰。文献[50-51]将无人机路径规划与无线充电平台结合,通过机器学习的方式辅助定位,但方案灵活性不高。
4.2 系统稳定性分析
无人机无线充电平台布置在高压输电杆塔的顶部,高压输电线周围会产生强磁场和强电场,很容易对无线充电平台内部器件产生干扰。
典型110 kV 和220 kV 输电线路杆塔包括单回酒杯塔、单回猫头塔、单回耐张塔以及双回羊角塔等。针对不同结构的杆塔,无人机充电平台的布置方式、输电线磁场对充电平台的影响,需要进一步细化研究。文献[50]中平台置身于杆塔顶部,如图17 所示,需要对塔身载荷进行杆塔力学的重新校核与计算,获取不同载荷条件下杆塔的受力情况,并分析杆塔有可能产生的形变。

图17 布置于杆塔顶端的巡检无人机无线充电平台Fig.17 Wireless charging platform for UAV arranged at the top of tower
无人机无线充电平台需要长期暴露在室外,且充电平台一般布置在输电杆塔顶端,在恶劣天气下极易受影响。室外充电平台会遇到低温、高湿、高温等恶劣环境[51-52]。目前所做的实验均是在实验室理想条件下,一旦环境变化,无线充电的表现如何,还需要进一步研究。在户外的无人机无线充电系统中,无线充电的系统效率将会比实验室条件下的效率低,因此需要考虑提升无线充电效率的方案。考虑到无人机无线充电系统受体积与重量的限制,可以通过增加线圈之间的耦合程度,改善电力电子器件的控制方案,减小无线充电的损耗。此外,高空的充电平台易受雷击,需要对无线充电平台在雷雨天气下的可靠性进行研究,同时设计相应的防雷保护方案。
4.3 工程化应用
中国电力科学研究院参与的国家电网科技项目《基于光伏储能和无线充电的线路巡检无人机智能续航技术研究》,其预期目标是研制出无人机无线充电平台样机,初步确定巡检无人机无线充电输出电压为12 V,充电平台布置在输电杆塔顶端。项目需要解决无线充电平台稳定工作电磁环境判据,给出抑制高压电磁干扰措施,实现高压线路工频与无线充电高频的电磁兼容,保证无线充电平台的长期安全稳定运行。
同时,考虑到输电线路走向与当地地形,需要对巡检无人机充电平台的布置进行有效的规划布局。该项目建立无人机能量需求特性、无线充电平台能量供给特性与外界环境之间的耦合分析模型,提出无线充电平台强时空耦合下的容量、数量及空间距离的优化布局方案。
项目目标:充电平台整体效率达80%以上,研制出基于磁共振无线输电技术的塔上供电模块,传输距离≥2 m,发射端转换功率≥200 W。
5 无线电能传输的发展与改进
经过多年的研究与发展,WPT的性能和稳定性有了长足的进步。目前,WPT在电力系统中的应用愈加广泛,江苏同里建设了一条“三合一”电子公路,其中包含了动态无线充电;中国电力科学研究院与鲁能智能技术有限公司合作研发的第六代无线供电式变电站电力巡检机器人投入使用;由中国电力科学研究院与国网江西省电力公司合作的基于光伏储能与无线充电的线路巡检无人机研发成功,即将投入使用。
然而,磁耦合谐振式无线电能传输技术仍然存在着改进的空间。提升磁耦合谐振式无线电能传输效率一直是研究领域的热点问题,可以通过改进无线充电系统的电路拓扑、磁耦合机构、耦合线圈以及控制方式来提升效率。例如对逆变电路拓扑进行改进,采用E 类逆变器,显著提升了充电效率。
在一些特定的应用场合,对WPT的传输功率有一定的要求。大功率WPT可通过提高输入功率的方法实现。第一,采用模块化并联的方案。但是模块化的结构对控制电路的要求较高,要求保证各模块触发脉冲的一致性,否则将会在电路中产生巨大环流,影响设备安全。第二,采用多拾取线圈的方案。但是难以保证多个拾取线圈都能够以最大效率向发射线圈拾取功率,可能会导致系统效率下降。
与普通应用场景不同,电力系统中的电磁环境比较复杂。首先,电力系统的许多设备(如变压器、线路等)周围磁场较强,容易对磁耦合谐振式无线电能传输系统产生影响,造成传输功率和传输效率的下降。其中一种方案是采用自适应频率跟踪WPT系统,通过粒子群优化算法,保证传输的平稳性。再者,磁耦合谐振式无线电能传输系统依靠高频磁场传输电能,在传输线圈中存在漏磁,可能会对电力系统中的其他设备,特别是通信设备产生干扰。
双向无线电能传输技术为无线充电设备参与到电网调度,实现与分布式微电网的友好融合提供了极大的便利。双向无线电能传输技术可与新能源发电技术、微电网技术结合,将会成为新的研究热点。
6 结论
磁耦合谐振式无线电能传输技术在近几年的研究中取得了较大的突破,与电力系统的联系越来越紧密,应用愈发广泛。简要介绍了WPT的部分应用案例,分析了应用方案中的优势、挑战与不足。作为一项新兴技术,它拥有广阔的应用前景,但是目前在充电效率、充电功率、系统稳定性、电磁屏蔽等方面具有广阔的研究空间。充电效率与充电功率的提升对于无线电能传输技术的发展具有重要的意义,提高系统稳定性与电磁屏蔽能力有助于无线电能传输技术的进一步推广。