A-SMGCS V 级系统中机载场面告警算法
2022-03-17陈柯帆汤新民胡钰明陈强超
陈柯帆,汤新民*,胡钰明,陈强超
(1.南京航空航天大学民航学院,江苏南京 211106;2.中南民航空管通信网络科技有限公司,广东广州 510080;3.中国民用航空中南地区空中交通管理局,广东广州 510080)
机场场面滑行是飞行活动中最具挑战性的阶段之一,特别在地面滑行道布局结构复杂、航班量大、低能见度天气运行、雨雪天气机场道面标志被覆盖等情况下,地面滑行难度和管制员的压力会大大增加。
机载自动化系统作为当前大型客机航空电子系统的重要组成部分,主要应用于低能见度的场面运行,具有增强态势感知、提高滑行性能、增加滑行安全性和减轻飞行员工作负担的特点,是近年来国外场面机载系统的主要研究方向。例如,美国Jeppesen 公司开发的电子飞行包(electronic flight bag,EFB)可提供空中和地面的综合信息管理,大大提高飞机的运行效率[1]。EFB 在场面导引时可快速更新信息,并呈现在EFB 面板上。
我国依然保持传统的滑行引导方式,即通过管制员指引和引导车引导,但是随着近年来机场资源逐渐饱和,地面滑行热点区域不断增多,传统滑行引导方法过分依赖引导员职业素质的局限性展露无遗。因此,为降低安全风险,提高运行效率,Aero MACS(aeronautical mobile airport communications system)场面滑行引导系统现已应用于某些机场航空器地面引导[2]。AeroMACS 系统采用高精度地图,能够精准识别飞机所在位置、目标位置及周遭环境。
国际民航组织发布了ICAO Doc9830,提出先进机场场面引导与控制系统(advanced surface movement guidance and control system,A-SMGCS)
实施方案[3]。其目标是实现在任何密度、能见度和复杂条件下,支持航空器安全、有序、迅速地移动。当前对A-SMGCS 系统的功能开发以及研究主要集中在系统架构设计[4−6]、路由引导[7]等方面。为了满足航空运输量进一步增长的需求,现有A-SMGCS 系统需要通过新程序、新技术、新方法全面升级到V 级,在不降低安全水平的前提下,提升系统容量、提高运行效率。与传统Ⅳ级ASMGCS 主要通过机场管制员对场面车辆和飞机活动进行监视和引导相比,V 级系统中的告警组件更加注重飞行机组人员对跑道环境的掌控,利用信息化技术对场面进行自动化监控与告警,这样可以大大减轻飞行员及管制员工作负担,对于提高机场运行管理效率,提升机场容量等方面具有十分重要的现实意义。文献[8]通过估计各航空器到达联络道的时间,并与固定阈值比较进行冲突判断,且介绍了该方法在国内机场的应用。文献[9−10]通过Petri 网对滑行道建模进行冲突预测以及提供冲突解脱策略。
在A-SMGCS V 级系统的项目开发过程中,根据软件设计要求,告警组件需应对的告警场景主要包括距离偏离路径、航向偏离路径、超速、翼展超出限制、滑行道冲突、起降跑道错误、起降跑道长度不足,共计7 种。本文对滑行道冲突、跑道长度不足2 种场景的告警算法进行了设计,并接入仿真环境进行测试验证。
1 告警场景分析
1.1 告警场景概述
1.1.1 冲突告警
2 架或2 架以上的航空器按各自当前滑行速度和方向在滑行道上滑行时,将同时经过一个点或进入一个区域,导致航空器在场面无法正常、有序滑行,这样的情形即为滑行道冲突。滑行道冲突可分为追赶冲突、交叉冲突、对头冲突。当模型探测到潜在的冲突时,应发出告警,提示飞行员提前采取规避措施避免冲突。
1.1.2 起降跑道长度不足告警
飞机在跑道滑跑的过程中,根据飞机实时速度、场面风速、风向、气压以及跑道摩擦因数建立运动学模型,推算当前飞机需要的滑跑长度,同时根据飞机与跑道端点的距离推算飞机实际剩余跑道长度。如图1 所示,飞机所需跑道长度大于实际剩余跑道长度,此时应发出告警,提示飞行员根据情况调整。

图1 跑道长度不足示意图
1.2 算法原理
1.2.1 冲突告警
首先读取AMDB(airport mapping database)获取机场设施的位置坐标、形状类型以及跑道保护区坐标,从空管获取其他飞机位置、速度信息;然后根据飞机自身的位置及速度计算潜在的碰撞时间,根据告警的时间阈值判断是否输出告警。算法原理如图2 所示。
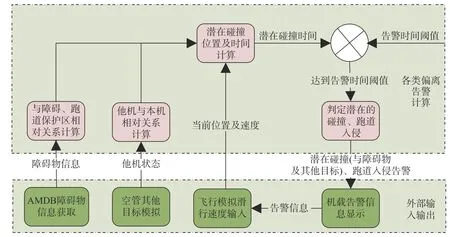
图2 碰撞告警算法原理图
1.2.2 起降跑道长度不足告警
起飞降落时根据飞机自身参数信息(包括位置、速度、起飞和慢车推力、刹车阻力)、空管运行仿真软件发送的机场场面参数(包括温度、道面摩擦因数、风速方向、气压)计算所需剩余跑道长度,根据航空器当前位置和跑道两端位置信息计算判断实际剩余跑道长度是否符合要求,若跑道长度不足则进行告警。算法原理如图3 所示。

图3 起降跑道长度不足告警算法原理图
1.3 机场基站坐标系
1.3.1 AMDB 数据库文件读取与解析
通过对AMDB 数据库中shp 坐标与dbf 属性文件的头文件与实体数据读取,解析获得坐标、属性以及匹配对应信息,以实现机场所有元素信息的获取,如图4 所示。
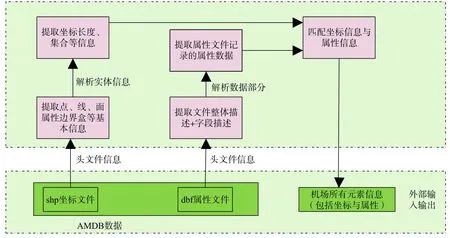
图4 AMDB 数据库文件读取与解析
1.3.2 基于坐标转换模型的机场地图元素坐标信息解算
机场地图元素坐标为WGS-84 坐标。为便于系统显示和坐标计算,需要将其转换为以机场基准点为原点的机场参考点直角坐标,包括将WGS-84 坐标转换成球心直角坐标和将地心直角坐标转换成机场参考点直角坐标。WGS-84 坐标系是一个协议地球坐标系,其坐标系原点是地球的质心,X轴指向BIH1040的零度子午面和协议地球极赤道的交点,Z轴指向BIH1040定义的协议地球极方向,Y轴构成右手坐标系。WGS-84 椭球的几何中心和地球质心重合,椭球的旋转轴和Z轴一致。
WGS-84 椭球采用国际大地测量与地球物理联合会第17 届大会大地测量常数推荐值。图5 为WGS-84 坐标转换成直角坐标示意图。图5 中L、B分别为点P的经度、纬度。

图5 WGS-84 坐标转换成直角坐标
将球心直角坐标转换为机场参考点直角坐标是在2 个直角坐标系之间的转换,将球心直角坐标做2 次旋转:绕Z轴旋转(90◦+L),绕X轴旋转(90◦−B),其中L和B为WGS-84 坐标中的经度和纬度。至此完成WGS-84 坐标向机场基站直角坐标的转换,为场面告警计算提供基础。
2 冲突告警算法设计
2.1 对头冲突
1)2 机之间有交叉口。如图6 所示,假设有航空器A、航空器C,dA、dC分别为A、C2 机到交叉口的距离,R为 交叉口半径,rp为飞机保护区半径。若2 机与交叉口的距离满足条件:

则2 机都没有足够距离通过转弯解脱冲突,即发生对头冲突。为及时发出告警提示,根据运动趋势计算得到他机将先到达交叉口时,提示本机进行等待,直到他机转弯解脱冲突。当满足条件dA/vA>dC/vC时,可认为他机将先进入交叉口,此时发出告警提示。其中:vA为航空器A 当前速度;vC为航空器C 当前速度。
2)2 机之间没有交叉口。若2 机处于同一滑行道段并且相向而行,由于2 机之间没有交叉口供解脱,则直接发出告警。
2.2 交叉冲突
如图6 所示,假设有航空器A、航空器B,2 机都将进入交叉口,若同一时间不只有一架航空器在使用交叉口,则发生交叉冲突。为此,需要确定此情形下2 机最小水平间隔dmin1,为
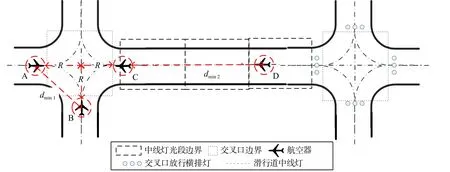
图6 滑行道冲突示意图

式中 φ1为交叉口张角。根据最小水平间隔dmin1,通过相对速度矢量判断冲突趋势,其具体方法如下。
设航空器地速为vGS,航向角为 φ,在地面滑行的条件下,其运动学方程为

假设航空器 a初始状态xa(0)=[xa,ya,ϕa]T,地速=[vGS,acos φa,vGS,asinφa]T,航空器 b初始状态xb(0)=[xb,yb,ϕb]T,地 速=[vbcosφb,vbsinφb]T。在地面惯性参考坐标系中,航空器 b相对于航空器a的相对位置可以表述为:
不同情形下航空器具有不同水平间隔dmin,用式(5)判断2 架航空器之间是否存在冲突:当∆>0时,2 架航空器之间当前不存在冲突,反之则存在冲突。

为便于根据航空器当前状态判断航空器之间未来的冲突趋势,本文采用相对运动法。为便于计算,2 机保护区半径取dmin/2,图7 中2 条与航空器b保 护区相切并且平行于−的直线之间形成区域称为航空器 b沿航空器 a运动方向的滑行走廊。若航空器 b的 滑行走廊和航空器 a的保护区之间有交集,就说明存在潜在的冲突。

图7 航空器潜在滑行冲突的检测
在惯性坐标系中,2 航空器相对方位矢量与航空器 a运动方向的夹角,2 航空器相对速度矢量与航空器a 的运动方向的夹角α,为

显然,当航空器 b的 滑行走廊与航空器 a的飞行方向的夹角大于β+δ,或者小于β−δ时,航空器 a的保护区与航空器 b的滑行走廊就不会有交集,即不存在潜在飞行冲突。因此,避免飞行冲突发生的条件为

2.3 追尾冲突
如图6 所示,假设有航空器C、航空器D,2 机使用同一滑行路段同向滑行,若2 机距离小于水平间隔dmin2,则产生追尾冲突,dmin2取值根据尾流间隔标准,为

根据最小水平间隔dmin2,通过相对速度矢量判断冲突趋势。该方法已在交叉冲突中介绍,此处不再赘述。
3 起降跑道长度不足告警算法设计
3.1 起飞跑道长度计算
在飞机起飞滑跑时,根据飞机的性能参数、跑道的地理信息以及飞机的当前速度,实时计算跑道长度是否满足起飞要求。若不满足起飞需要的长度,将发出警报,提示机组加速或减速。为此,建立起飞所需跑道长度Sq关于飞机当前地速v的函数表达式,为

式中:Kq代表起飞滑跑长度的综合修正系数(IMC);vqw为满足飞机起飞升力要求的实际地面速度;a为飞机起飞时所受的合加速度。
1)飞机起飞时地速vqw计算。在标准大气压下,临界状态时飞机升力等于重力,由伯努利定理可得等式(11)。

式中:G0为标准起飞重力;ρ0为标准大气压下的空气密度;v0为标准大气压下的飞机起飞空速;C为飞机升力系数,受飞机迎角影响;S为机翼投影面积。相同机型起飞时,后2 个参数都可视为定值。
同理可得,相对空气密度为d时的飞机实际起飞重力满足等式(12)。

式(11)与式(12)相比,得

考虑地面风速vw影响,得到的实际地速为

2)飞机起飞时加速度a计算。飞机发动机以最大功率运行时,以飞机运动方向为正的加速度为

式中:g为重力加速度;Pb为发动机最大功率运行时作用在飞机上的平均推力;kd为空气密度对推力的影响系数;Gq为飞机的实际重力;µq为跑道对飞机的综合阻力系数;i为跑道纵向坡度。
3)飞机起飞所需跑道长度。将式(14),式(15)代入式(10)可得

式中:Kq代表起飞滑跑长度的综合修正系数(IMC);Vq0是标准大气压下相对于起飞重力G0的起飞速度,m/s;Gq是飞机实际起飞重力,N;d是空气相对密度,此密度可通过式(17)算出;vw是跑道方向上的风速,m/s;g是重力加速度;Pb为发动机的平均推力,N;kd是空气相对密度d对推力Pb的影响系数;Gq是飞机起飞重力;µq是综合阻力系数;i是跑道的平均纵向坡度。
空气相对密度公式为

式中:P是大气压强,Pa;t是空气温度,℃。
3.2 着陆跑道长度计算
利用计算起飞所需跑道长度的方法,将制动减速度代入式(10),同理可得,着陆所需跑道长度St关于飞机当前地速v的表达式为

式中:Kl是着陆滑跑长度的IMC;Vl0是飞机着陆时需要下降到的符合滑行道速度限制的地速,m/s;Pm是发动机的平均慢车推力,N;Gl是飞机着陆重力,N;µl是综合阻力系数。
3.3 告警条件
计算飞机距跑道终点的实时距离时,跑道终点的位置坐标可由读取AMDB 获取。这个实时距离即为剩余跑道长度。将起降所需跑道长度与剩余跑道长度比较,若剩余长度不足,则发出告警。
4 仿真验证
4.1 仿真环境数据源说明
模型进行告警计算需要的外部数据源主要包括本机状态信息、他机状态信息以及机场地图数据。其中机场地图数据属于静态预读数据,接入方式已在1.3 节中提及。本机及他机定位信息属于动态实时数据,需要搭建网络通信环境。
本文采用UDP 协议进行数据通信,发送方对指定端口进行全网段广播,该网段内所有主机通过监听该端口获取实时数据。
他机信号来源为某机场真实的飞机运行数据,实验室主机已接入来自该地的ADS-B 雷达数据,并以SBS 报文格式发送至告警组件。
本机信号来源为飞行模拟软件,用户以第一视角操控虚拟飞机在某机场进行滑跑,实时的本机状态信息按照GPRMC 报文格式发送至告警组件。
4.2 基于FlightGear 的飞行模拟
通过对开源飞行软件Flightgear 进行功能拓展,用户操作飞机时,本机的实时位置、速度信息能够被记录并向外界发送。图8 是仿真软件中在某机场07 跑道准备起飞时的驾驶员视角。

图8 Flightgear 机舱视角图
4.3 空管运行仿真软件
空管仿真软件主要作为仿真的显示端,可以将本机、他机飞机位置以及机场地图进行实时显示。同时,该软件也是他机目标信息的传输中介。它接收某机场的雷达信号,解析后传送至告警组件。图9 是某机场飞机目标的显示效果。
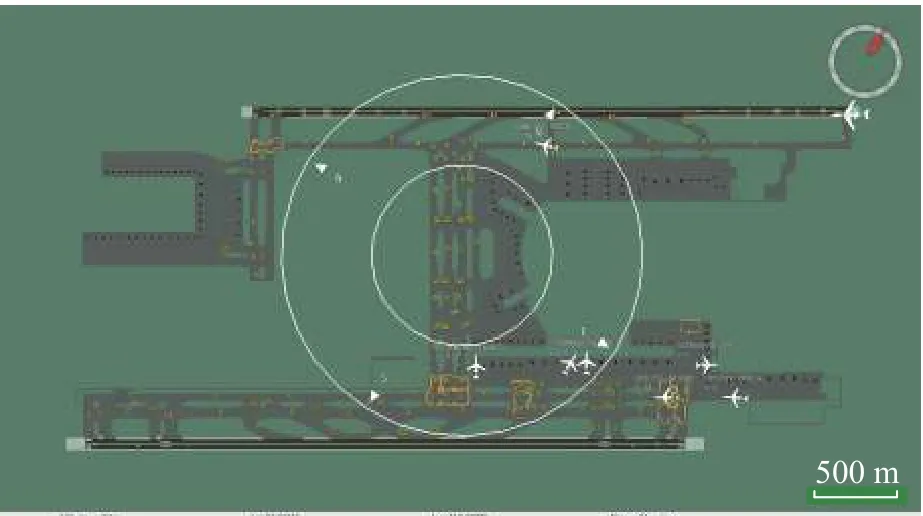
图9 空管仿真组件界面
4.4 仿真结果说明
为便于直观地观察告警结果,将相关数据汇总在CSV 文件中,并通过MATLAB 计时器以0.5s为周期读取、刷新数据进行动态曲线绘制。告警曲线以接收方空管端为准,后台参数曲线以发送方告警端为准。
通过比对参数与告警曲线的时间轴,可以直观地判断告警计算是否正确、消息收发是否及时。因篇幅有限,两类告警各取一例进行展示。
1)冲突告警仿真结果。本机目标(白色),他机目标(黄色)位置关系如图10 所示。
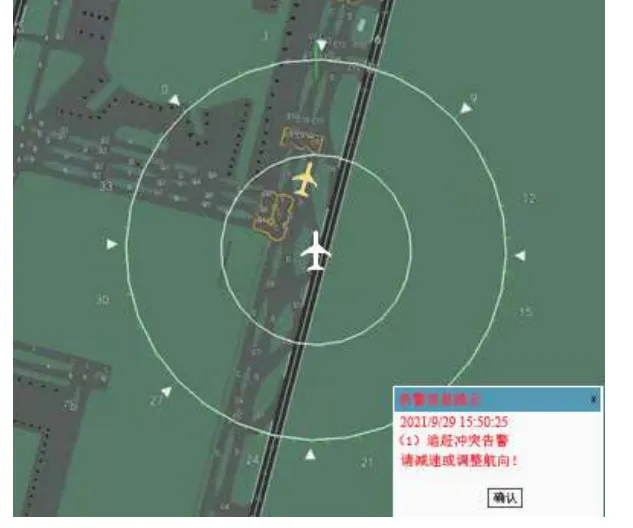
图10 追赶冲突告警视图
可以看出,若本机速度较大,且2 机运动趋势保持不变时,将发生追赶冲突,此时飞行员应收到告警提示,并根据情况选择减速或者调整航向。相关数据曲线如图11 所示。其中:横坐标为自仿真开始经过的时间;追赶状态表示他机是否与本机处于同一滑行道段构成追赶关系(0 为否;1 为是);告警状态表示空管端是否收到告警(0 为否;1 为是)。
从图11 可以看出,告警端后台参数满足告警条件时空管端正确收到告警信息,且无明显延迟。

图11 追赶冲突告警曲线图
2)起飞跑道不足告警仿真结果。飞机起飞滑跑时,若因加速度不足,无法利用剩余跑道加速至起飞速度,将提示告警,如图12 所示。相关数据曲线如图13 所示。其中告警状态表示空管端是否收到告警(0 为否;1 为是)。

图12 起飞跑道不足告警视图
从图13 可以看出,告警端后台参数满足告警条件时空管端正确收到告警信息,且无明显延迟。

图13 起飞跑道不足告警曲线图
5 结束语
目前,对自动化告警算法的研究大都停留在理论阶段,考虑情形较为简单,避开了处理多源输入数据、应对复杂告警场景等难点,缺少实践验证,离投入实际的场面运行仍有相当长的距离。
本文基于高级场面活动引导与控制系统(ASMGCS),对滑行道冲突、起降跑道不足2 种情形进行算法设计以及程序开发,并搭建仿真环境提供监视源数据进行验证。通过仿真结果可以看出:算法逻辑合理可行,能够给出符合预期的告警结果;程序的内存使用及计算效率较高,运行在普通配置的个人电脑上,仍能保证在0.5s 的探测周期内完成所需的告警计算。
但是模型仍存在一定的局限性,告警的及时性仅能在仿真环境中得到保证。仿真环境中,系统的模块间通信均在同一局域网内进行,几乎不存在数据丢失、延迟等问题,而在场面的实际运行的过程中,因雷达设备、气象条件及流量高峰等原因,可能会导致通信质量下降,这些因素是在实验室环境中难以模拟并应对的。因此算法在投入到实际的工程项目前,还需要考虑引入相应的异常数据处理、负载均衡等技术。