水稻机插硬盘育秧自动叠盘装置研究现状及展望
2022-03-16靖谢方平符志勇刘大为王修善李
杨 靖谢方平符志勇刘大为*王修善李 旭
水稻机插硬盘育秧自动叠盘装置研究现状及展望
杨靖1,谢方平1,2,符志勇1,刘大为1,2*,王修善1,2,李旭1,2
(1.湖南农业大学机电工程学院,湖南 长沙 410128;2.智能农机装备湖南省重点实验室,湖南 长沙 410128)
育秧是制约水稻机械化种植发展的关键因素,当前我国有关水稻工厂化育秧设备技术的研究相对较薄弱,现有水稻育秧播种流水线中覆土作业后的秧盘主要是由人工进行逐个叠放,工作效率低,劳动强度大,且直接影响着工厂化育秧的生产效率。通过概括国内外水稻育秧播种流水线自动叠盘装置的研究现状,深入分析了现有自动叠盘装置的结构特点及其工作原理,针对其存在的不足和缺陷,对未来水稻育秧播种流水线自动叠盘装置的发展趋势进行了展望,以期为叠盘设备的研究提供一定参考。
水稻育秧;播种流水线;自动叠盘;智能化
我国人多地少,粮食安全一直是国家的头等大事。水稻是我国主要的粮食作物,年种植面积约3000万hm2,约占全国粮食种植总面积的30%,占世界水稻种植面积的20%。我国年产稻谷约2亿余吨,接近粮食总产量的一半,是我国单产最高的粮食作物,因此水稻在我国粮食生产中占有十分重要的地位[1-3]。目前,我国水稻种植环节机械化水平较低,育秧是制约水稻机械化种植发展的关键因素[4]。我国水稻机械化育秧技术主要为秧盘育秧,有水稻工厂化育秧和田间育秧两种形式[5],育秧质量的好坏将直接影响机插秧质量和增产效果,水稻工厂化育秧相较于传统育秧可以满足机插秧的要求,且具有秧苗品质好、育秧周期短、人工劳动强度低等优势[6, 7]。
在工厂化育秧中,目前基本采用育秧播种流水线进行水稻播种作业,可一次性完成秧盘的自动摆放、铺底土、压实、播种、淋水、覆表土和叠盘等工序[8]。在叠盘阶段,叠盘装置在机械或气动等原理的作用下,可将完成覆土作业后的单个秧盘整齐叠放在一起,以便于人工搬运或机械手码垛。目前,在叠盘阶段大多是通过人工完成逐个取盘,工作效率低,劳动强度大(人工取盘最高效率500盘/h),因此研究出适合于秧盘叠放的设备对提高水稻工厂化育秧效率、降低生产成本投入和提高水稻机械化种植率极其重要[9]。
1 国外研究现状
目前水稻种植主要分为直播和育秧移栽两种方式[10]。欧美和澳大利亚等国家的水稻种植模式以直播为主,用于水稻育秧播种作业的机具设备较少,主要用于蔬菜、花卉等作物育苗播种作业,被广泛应用的流水线机型有B1ackmore System、Marksman、Speed1ing System、Hamilton等,自动化程度高,作业效果好[11, 12]。
日本和韩国育秧播种设备的技术水平在亚洲较为领先。日本于20世纪70年代在蔬菜、花卉等育苗设备的基础上,研发出了适用于水稻工厂化育秧的播种设备,在80年代育秧和插秧机械就已基本实现系列化和标准化。目前,日本的久保田、井关、洋马和三菱等株式会社都研发出了相应的育秧播种设备[13-15],均具有产品成熟,智能化程度高,引进价格昂贵,设备成套存在等特点。久保田公司研制的S-ST系列自动叠盘装置和矢崎公司生产的自动叠盘机,具有自动化程度高、工作效率快等优势。韩国的水稻机械化技术起步较晚,但在引进国外先进技术和创新的基础上,已有跟日本齐驱并驾的趋势[16]。日本和韩国典型自动叠盘装置的型号和特点,如表1所示。
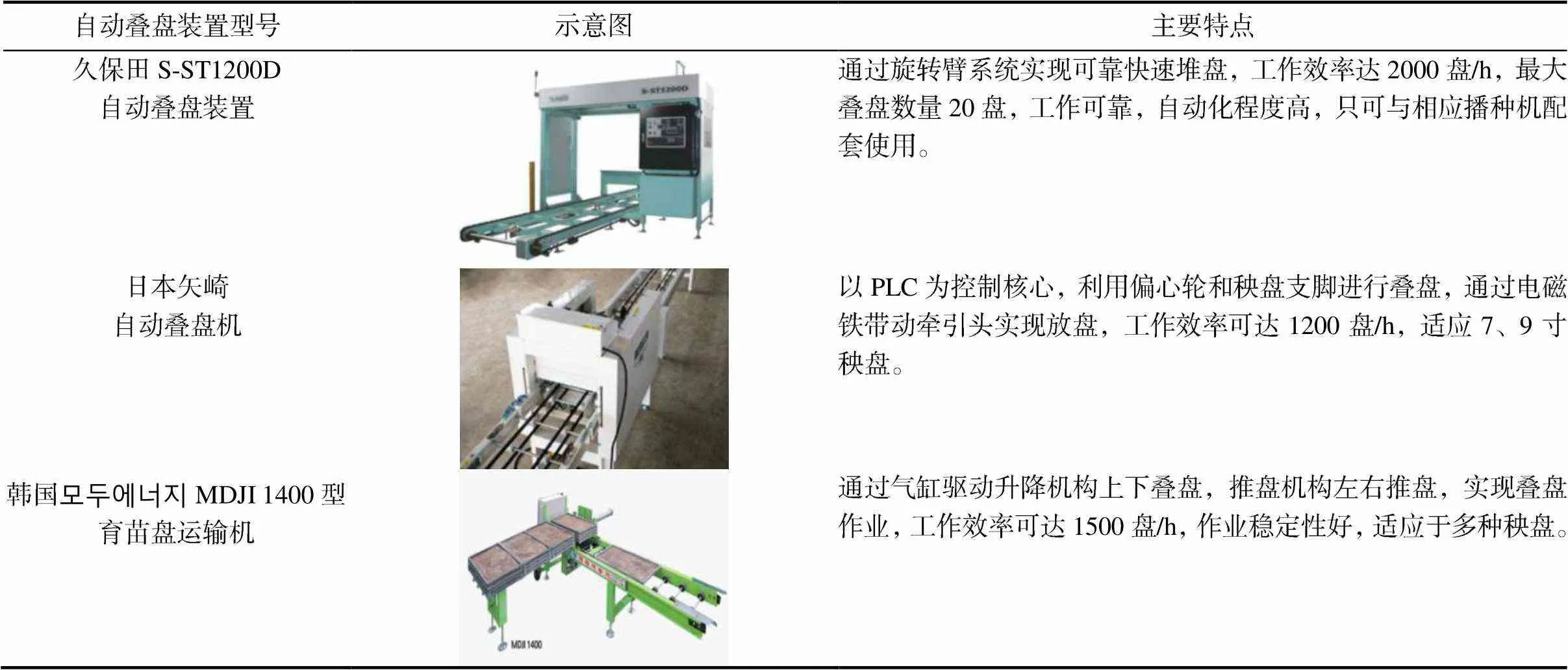
表1 国外典型自动叠盘装置
由此可见,虽然欧美等发达国家对流水线设备的研究主要集中在蔬菜、花卉等园艺植物,但其相关设备的制造也为水稻育秧播种设备的研制提供了一定技术参考。日本和韩国的水稻育秧播种设备自动化程度高,作业性能好,其自动叠盘装置技术水平较为先进,成套设备适合于大规模水稻种植作业,但引入成本较高,并不适应于我国低成本、轻简化的育秧作业。
2 国内研究现状
我国的水稻种植模式主要以育秧移栽为主[17],与国外成熟机型相比存在成本较高、推广困难等问题。我国有关育秧设备的研制起步于20世纪80年代,在吸收国外先进机型的基础上,也逐步研发出了自己的育秧播种设备[18]。近年来,国内多所高校、科研单位和农机企业对水稻育秧播种设备进行了多项究,在取得丰富经验的同时也研制出了多种适用于水稻工厂化育秧的新型设备。
目前,根据工作原理自动叠盘装置可分为机械式和气动机械组合式,这两类叠盘装置的工作原理相似,差别在于如何实现叠盘动作。机械式叠盘装置是指采用电动机作为动力来源,由电动机驱使曲柄滑杆、拉杆等机械部件将电机输出的旋转运动转变为上下直线运动来实现秧盘的堆叠,采用机械式工作原理的叠盘装置具有低成本、调节方便和稳定性强等优点,适合于高速作业。气动机械组合式叠盘装置是利用气缸拉动顶盘机构来实现叠盘,用空气机提供气源,通过传感器发送信号给电磁阀,由电磁阀来控制气缸动作,其特点是动作迅速、控制方便,但容易受到外部气源和电子设备的影响,速度快时会产生较大冲击,且速度难以控制。
2.1 机械式叠盘装置
国内很多水稻育秧播种设备生产企业都有自主研发的机械式工作原理的叠盘装置产品。台州市一鸣机械设备有限公司研发的自动叠盘机构,主要由机架、升降机构、秧盘持顶装置和秧盘位置感应装置等组成,如图1所示。升降机构采用X式的升降架,秧盘持顶装置由铰接在机架上的活动顶刀组成。通过尾部感应装置检测秧盘信号并控制升降机构的动力装置,驱动电机使升降机构完成上下运动,升降机构将秧盘推送至活动顶刀上方。该装置结构简单,设计合理,能满足硬秧盘的叠盘作业,但不能设置叠盘数量,高速作业时需要及时搬运[19]。
1 机架;2 动力装置;3 拉杆;4 升降架;5 盘架;6 活动顶刀;7 秧盘;8 防撞片。
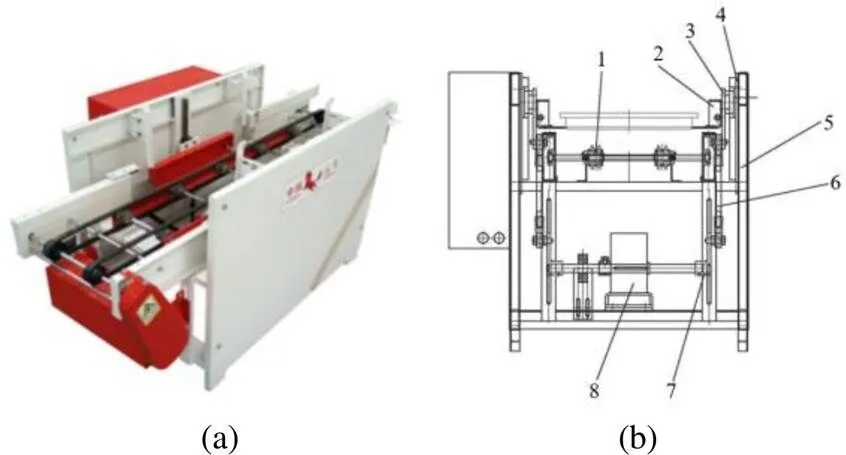
杭州赛得林智能装备有限公司针对其“播种机育苗盘叠盘机构”专利中存在叠盘气缸数量多、成本高,动作可靠性较差等问题,设计了一种机械式的播种机自动叠盘机构,主要由机架、输送装置、顶出装置和支撑装置组成,如图2所示。该机构工作时,由电机输出动力,利用传动盘和连杆带动可绕导杆上下滑动的顶出装置进行叠盘作业,结构简单,叠盘动作稳定,但不适用于软盘作业[20]。

1 机架;2 顶出装置;3 动力电机;4 挡板;5 感应头;6 限位板;7 顶出架;8 支撑块;9 输送装置。
江苏云马农机制造有限公司生产的垒盘机主要通过可上下滑动的滑块与一端只可向上翻转的翻转板实现叠盘作业,如图3所示。该机构由行程开关检测秧盘信号,电机驱动连接曲轴旋转,使连接杆带动滑块向下运动,翻转板触碰到秧盘顶部时向上翻转,待滑块到达最底端时,翻转板处于水平状态,并托起秧盘底部。该机构结构新颖,可设置叠盘数量,但目前只能配套该公司秧盘使用,工作效率有待加强[21]。
1传送带; 2支撑挡板; 3滑块; 4滑块导轨;5固定挡板; 6连接杆; 7连接曲柄; 8电机。
图3 江苏云马垒盘机
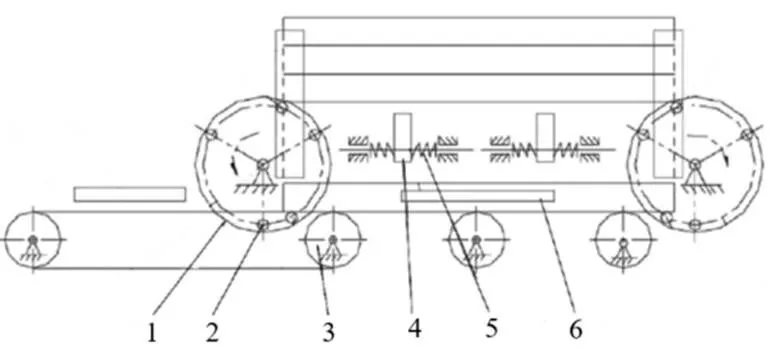
重庆市农业科学院高立洪等[22]人设计的秧盘叠盘机主要由机架、秧盘导向立架、光电传感器、电磁离合器和凸轮等组成,其中秧盘导向立架包括可绕转动轴旋转的秧盘支撑杆,如图4所示。进行叠盘作业时,由光电传感器检测秧盘信号,利用凸轮的旋转顶起秧盘底部,将秧盘支撑于秧盘支撑杆上。该装置采用机械零部件相互配合进行叠盘,平稳可靠,但凸轮会对秧盘底面造成较大冲击,容易导致秧盘内均匀分布的种子发生错位,适合于低速作业。
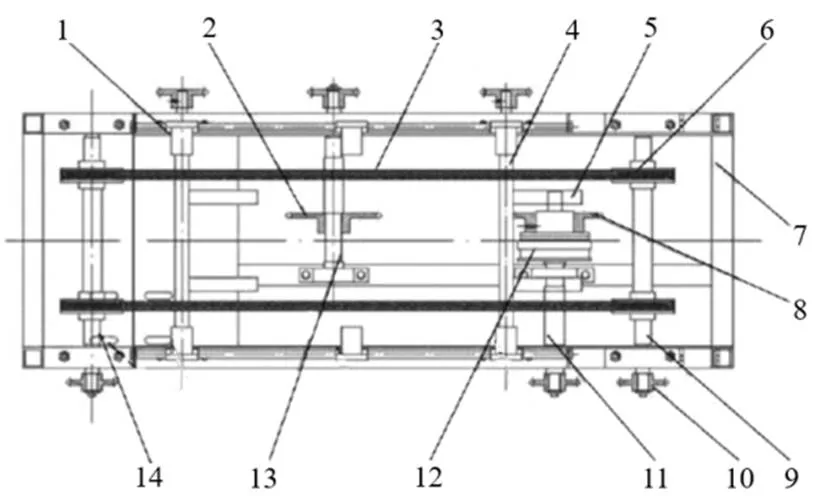
1 秧盘导向立架;2 从动传动连链轮;3 输送皮带;4 凸轮轴;5 凸轮;6 皮带轮;7 机架;8 从动链轮;9 从动皮带轮轴;10 链轮;11 电磁离合器轴;12 电磁离合器;13 凸轮主轴;14 主动皮带轮轴。
浙江理工大学李革等[23]研制的拨轮式秧盘叠盘机的前后拨轮可实现同步转动,拨轮上有伸出的边轴,如图5所示。该装置结构简单,作业时通过拨轮的转动,使边轴抬起秧盘至摆动顶盘架上,由于叠盘间隙较短,对秧盘的冲击小,可以保证秧盘内种子分布的均匀性,但未见投入应用。
1 拨轮;2 边轴;3 主动轮;4 顶盘架;5 弹簧;6 限位板。
2.2 气动机械组合式叠盘装置
台湾亦祥企业有限公司研发了多款水稻育苗播种机与穴盘自动堆叠机,图6为三大牌气动式叠盘机。该装置通过皮带输送秧盘,利用气缸提供动力进行叠盘作业,通过行程开关、升降气缸、搁板和控制阀门等装置进行秧盘的堆叠。叠盘作业反应迅速,工作效率高,但气缸冲击大,速度较快时叠盘整齐度不够理想,且只适用于传统毯状硬秧盘的叠盘作业[24]。

图6 台湾亦祥三大牌气动式叠盘机
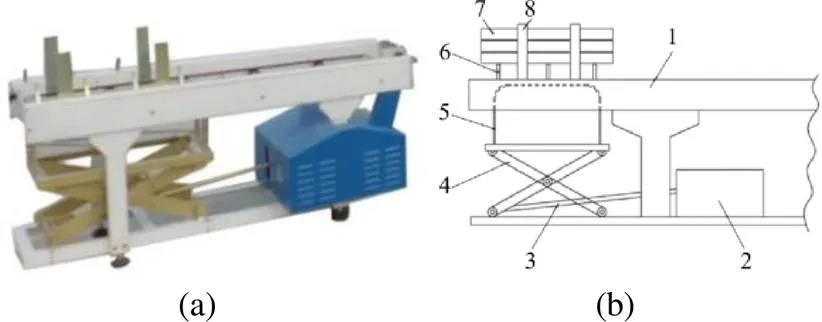
华南农业大学马旭等[25]针对现有叠盘装置只适用于硬盘作业且存在冲击过大,导致秧盘内土壤发生侧漏使得种子外露的问题,研制了一种水稻秧盘自动叠放装置,主要由空气压缩机、秧盘输送机构、秧盘升降机构、土壤防漏机构、电控箱、机架、和电动机等组成,如图7所示。工作时通过接近开关检测秧盘信号,利用PLC控制秧盘升降机构升降实现硬、软秧盘的快速自动叠放,由土壤防漏机构的气动移动盖板来防止秧盘内土壤在叠盘过程中发生侧漏而导致表土不足,避免种子外露。秧盘升降机构和土壤防漏机构的动力来源皆来自于气缸,土壤防漏机构作业时贴合在最上层秧盘顶部,可保证秧盘内种子均匀分布,叠盘过程反应迅速,但软、硬盘嵌套工序未能实现自动化,人工装盘容易造成疲劳。

1 导向板;2 橡胶辊轮;3 盖板;4 土壤防漏机构;5 盖板升降气缸;6 盖板电磁阀;7 秧盘升降机构;8 滑轨;9 接触板;10 机架;11 空气压缩机;12 接近开关;13 气源处理件;14 秧盘升降气缸;15 叠盘电磁阀;16 电动机M1;17 电控箱;18 电动机M2。
中国水稻研究所徐一成等[26]研发了一种气动式水稻育秧盘叠盘装置,主要由机架、对称分布的秧盘升降机构、皮带传送装置、光电感应器和气动控制装置组成,如图8所示。作业时通过光电感应器检测秧盘信号,利用气动元件控制升降单元和秧盘限位挡板的上下运动实现自动叠盘作业。该装置将动力、运动部件和托盘部件组合一体,通过调节两侧安装架的间距,可满足对不同尺寸规格的育秧盘进行叠盘操作的要求,但未见投入应用。
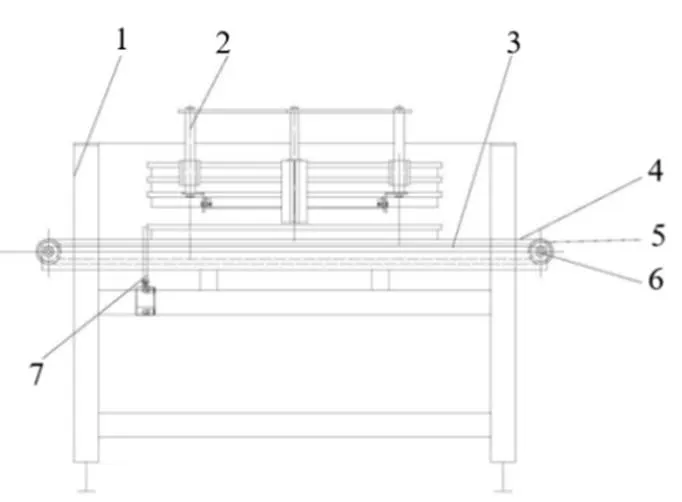
1 机架;2 秧盘升降机构;3 皮带传送装置;4 皮带;5 皮带轮;6 皮带轮轴;7 秧盘限位挡板
浙江大学王永维等[27]设计的一种水稻育秧播种苗盘自动叠放装置,主要由苗盘输送总成、苗盘叠放总成、气动总成和控制器组成,如图9所示。该装置通过电机驱动平移支架往复取盘和放盘,利用气缸伸缩实现升降支架与夹持器的夹盘运动,整机规模较大,叠盘过程稳定可靠,但工作效率较慢,且设备制造成本高。
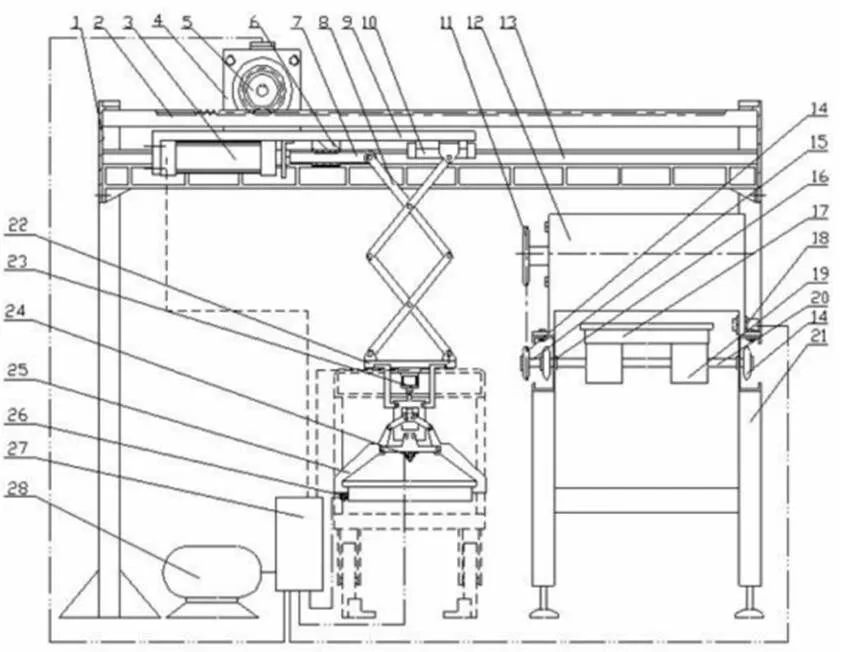
1 机架;2 齿条;3 升降气缸;4 步进电动机;5 齿轮;6 直线轴承;7 推杆;8 伸缩架;9 平移支架;10 滑块;11 主动链轮;12 减速电动机;13 导轨;14 从动链轮;15 主动轴;16 尼龙轴承;17 苗盘;18 光电传感器;19 滚轮;20 从动轴;21 输送架;22 升降支架;23 取放气缸;24 取盘接近开关;25 夹持器;26 放盘接近开关;27 控制器;28 空气压缩机。
综上所述,采用机械式和气动机械组合式均能实现叠盘作业[28-30],现有自动叠盘装备的叠盘方式几乎都是通过气缸或电机驱使顶盘升降机构顶起秧盘进行上下运动,利用秧盘两侧凸起的翻边,使秧盘被夹持在支撑块上,再通过人工搬运或机械手进行码垛。虽然不同叠盘装置对不同结构的秧盘适应性不同,但基本能实现硬秧盘的自动叠盘作业。
3 存在的问题
近年来,水稻工厂化育秧技术发展迅速,采用水稻育秧播种流水线解决了传统人工育秧播种过程中存在的耗时耗力等缺点,其配备的自动叠盘装置为秧盘的搬运提供了更为简便、快捷的方式。国外针对育秧播种设备的研究开展较早,设备较为先进,自动化程度和生产率高,但结构复杂,价格昂贵,目前我国只有少数大规模育秧公司引进。我国水稻育秧播种设备的研发是以国外成熟的育秧播种装置为原型,针对机体结构,叠盘机理,运动参数匹配等方面进行分析和研究,通过优化研制出了多种水稻育秧播种装置,但实际作业效果仍与国外先进设备存在一定差距,部分机型还处于试制阶段。
我国现有自动叠盘装置还存在以下问题:一是不能同时满足软秧盘与硬秧盘的叠盘作业,大多只能适应特定类型或尺寸的秧盘;二是对变形秧盘的适应性差,易出现叠盘整齐度低、卡盘和翻盘等问题;三是叠盘作业冲击较大,影响秧盘内稻种和土壤均匀分布甚至造成物料洒出;四是工作效率不高,增加了育秧设备的工作时间。
4 展望
近年来,随着我国城镇化和农业现代化的不断推进,农业机械已经能有效代替人工从事农业工作,工厂化育秧已成为了现代农业生产中的关键环节。现阶段我国有关水稻工厂化育秧的设备及技术依旧薄弱,自动叠盘装置的关键技术有待突破,需要进一步学习和借鉴国外先进机械设备,结合国情完成自主科技攻关,实现水稻育秧规范化、标准化生产。
(1)研究出对软、硬秧盘具有通用性的自动叠盘装置。当前,国内工厂化育秧朝着轻简化栽培种植技术方向前进,主要趋于使用低成本的软秧盘(硬秧盘的价格是软秧盘的10多倍)和育秧基质[31, 32]。现有自动叠盘装置主要应用于硬秧盘,进行软盘作业时需要在其底下人工套入特定的托盘,且容易造成脱落,秧盘数量多时人工劳动强度大,因此研究出对软、硬秧盘具有通用性的自动叠盘装置,是今后实现低成本、轻简化育秧作业的重点方向之一。
(2)设计出适应性强、叠盘冲击小且速度快的自动叠盘装置。现有自动叠盘装置在高速作业时会对秧盘产生较大冲击,容易破坏秧盘内土壤和稻种的均匀分布,甚至对秧盘造成损伤。其次是对秧盘的适应性差,秧盘经过反复使用产生变形或结构损伤后,无法进行叠盘作业,且往往一种叠盘设备只能适用特定的秧盘进行作业,因此急需改进叠盘机构结构或优化工作原理,以降低对秧盘的冲击,提高秧盘的适应性和工作效率。
(3)研发出作业性能完善的水稻育秧播种流水线辅助装置。目前与工厂化育秧设备配套的辅助装置应用较少,针对种子漏播、秧盘回收等方面的研发还处于空白,没有实现全自动化作业[33],研发出可实时检测稻种情况并补种的设备、秧盘收回和清洁设备、可自动输送秧盘的运输车和可剔除破损秧盘的设备等,对于提高工厂化育秧自动化和效率意义重大。
[1] 吴媛媛.我国水稻生产现状及发展趋势[J].新农业,2018,(7):27-28.
[2] 徐春春,纪龙,陈中督,等.中国水稻生产发展的绿色趋势[J].生命科学,2018,30(10):1146-1154.
[3] 湛小梅,孙志强,周玉华,等.我国育秧机研究进展与发展方向[J].中国农机化,2012,(6):62-66.
[4] 农业农村部:推进南方水稻机械种植[J].农业机械,2022,(4):53-54.
[5] 马旭,李泽华,梁仲维,等.我国水稻栽植机械化研究现状与发展趋势[J].现代农业装备,2014,(1):30-36,40.
[6] 孙锡斌.水稻工厂化育秧是提高产量节约成本的最佳途径[J].农民致富之友,2017(19):54.
[7] 杨东照.水稻工厂化育秧技术应用研究[J].农业科技与装备,2017,(3):68-69,72.
[8] 马旭,谭永炘,齐龙,等.水稻秧盘育秧播种机气动式自动供盘装置设计与试验[J].农业工程学报,2016,32(22): 63-69.
[9] 李中彦.水稻育秧秧盘自动叠放装置研究进展[J].农业科技与装备,2019(5):58-59.
[10] 周海波.水稻秧盘育秧精密播种机的关键技术研究与应用[D].长春:吉林大学,2009.
[11] 李洪昌,高芳,赵湛,等.国内外精密排种器研究现状与发展趋势[J].中国农机化学报,2014,35(2):12-16,56.
[12] 周海波,马旭,姚亚利.水稻秧盘育秧播种技术与装备的研究现状及发展趋势[J].农业工程学报,2008,24(4):301- 306.
[13] 株式会社クボタ.育苗箱積重ね機構:日本,2003246450 [P].2003—09—02.[J].
[14] 井關農機株式會社.苗箱の段積裝置:日本,200347343 [P].2003-02-18.[J].
[15] ヤンマ一農機株式會社.箱体積載裝置:日本,1056884 [P].1998-03-03.[J].
[16] 王亚梁,朱德峰,张玉屏,等.韩国稻作技术创新与转型[J].中国稻米,2017,23(1):57-59,64.
[17] 刘柱,由莉莉,王淑兰,等.浅谈我国水稻育秧设备的现状及发展趋势[J].农业开发与装备,2020,(11):26-27.
[18] 杨家豪,房欣,马浏轩,等.水稻育秧机械的研究和进展[J].农机化研究,2023,45(6):264-268.
[19] 余继琅.一种叠盘机构:CN202374771U[P].2012-08-15.
[20] 陈佳峰,尤匡标.播种机的自动叠盘机构:CN213485672 U[P].2021-06-22.
[21] 李群,孙亦嵘,陈松慧.一种垒盘机:CN107352277A[P].
[22] 高立洪,李萍,史有强,等.秧盘叠盘机:CN204416588U [P].2015-06-24.
[23] 李革,李明杰,王益君,等.拨轮式秧盘叠盘机:CN1030861 58A [P].2013-05-08.
[24] 陈林涛,马旭,齐龙,等.水稻秧盘育秧流水线自动叠盘装备现状与展望[J].农机化研究,2017,39(6):260-264,8.
[25] 马旭,谭永炘,齐龙,等.水稻秧盘育秧精密播种流水线软硬秧盘自动叠放装置[J].农业机械学报,2016,47(3): 29-36.
[26] 徐一成,朱德峰,陈惠哲,等.一种气动式水稻育秧盘叠盘装置:CN208716411U[P].2019-04-09.
[27] 王永维,曹林,王俊,等. 一种水稻育秧播种苗盘自动叠放装置: CN202594411U[P].
[28] 杜小强, 许鑫祺, 俞亚新, 等. 钵盘自动叠盘机: CN208666536U[P]. 2019-03-29.
[29] 姜志永. 一种水稻育秧盘叠盘装置: CN214155347U[P]. 2021-09-10.
[30] 刘海亮. 秧盘叠盘机: CN210480208U[P]. 2020-05-08.
[31] 唐兴隆, 任桂英, 李英奎, 等. 优质水稻工厂化育秧关键技术研究 [J]. 中国农机化学报, 2019, 40(6): 35-38.
[32] 杨德文,刘桂飞.水稻轻简化栽培主要技术[J].农业与技术, 2016, 36(12): 108.
[33] 庞莲香. 水稻工厂化育秧生产中辅助设备的重要性研究[J].广西农业机械化, 2019(3): 28-29.
Research status and prospect of automatic tray stacking device for rice seedling cultivation with machine insert hard disk
YANG Jing1, XIE Fangping1,2, FU Zhiyong1, LIU Dawei1,2*, WANG Xiushan1,2, LI Xu1,2
(1. College of Mechanical and Electrical Engineering, Hunan Agricultural University, Changsha, Hunan 410128, China; 2. Hunan Key Laboratory of Intelligent Agricultural Machinery Equipment, Changsha, Hunan 410128, China)
Seedling raising is the key factor restricting the development of mechanized rice planting. At present, the research on the equipment and technology of rice factory seedling cultivation in China is relatively weak. The rice trays of the existing rice seedling cultivation and seeding line after the middle soil covering operation are mainly stacked manually one by one. Manual operation has low efficiency and high labor intensity, and directly affects the production efficiency of factory seedling cultivation. This paper summarizes the research status of the automatic disc stacking device in the rice seedling cultivation and seeding assembly line at home and abroad analyzes the structural characteristics and working principle of the existing automatic disc stacking device. In view of its shortcomings and defects, the future development trend of automatic tray stacking device for rice seedling and sowing line was prospected. The research results of this paper are expected to provide some reference for the research of disk stacking device.
rice seedling cultivation; sowing line; automatic stack; intelligence
S223
A
2096–8736(2022)06–0001–06
杨靖(1999—),男,湖南衡山人,硕士研究生,主要从事农业机械技术及智能装备研究。
刘大为(1983—),男,湖南益阳人,博士研究生,副教授,主要研究方向为水稻生产全程机械化技术与装备。
责任编辑:阳湘晖
英文编辑:唐琦军
