草莓采摘机器人的系统研究设计
2022-03-14徐明东邱立涛曲文浩冀年源于杨青
徐明东,邱立涛,曲文浩,冀年源,于杨青
(沈阳航空航天大学 机电工程学院,辽宁 沈阳 110136)
0 引 言
随着草莓栽培技术的突破,国内草莓种植面积急剧增加,并且在一些地区草莓种植已经成为主要的经济来源,由于草莓果实成熟期短暂、果实特殊、草莓采摘必须在早上和晚上,导致工作劳动强度较大,所需经济成本较高,约占草莓种植总生产成本的25%。采摘期,劳动力不足,严重限制了草莓种植产业的发展。通过研究设计相应的机器人来代替人工完成这项费时费力的采摘工作,实现采摘到装盒过程的一体化,不仅可以提高采摘的效率,还可以降低人们的劳动强度,有利于推广更大面积的草莓种植。
目前,我国草莓采摘工作基本依靠人工,采摘效率低,成本占比逐年上升。据调查,近年来草莓的种植面积逐年增加,因此研究采摘草莓机器人具有重要意义。笔者重点通过对国内外采摘机器人的研究和双目立体识别技术的分析,设计出一套草莓采摘机器人结构方案,对于减少传统大棚草莓采摘的人力投入和完成传统转型有着至关重要的意义。
1 国内外草莓采摘机器人研究现状
早在1968年美国的Schertz和Brown[1]首次提出果蔬采摘机器人,但由于受到当时的工业控制水平的制约,美国的果蔬采摘机器人只停留在半自动化阶段。随着计算机图像处理技术的高速发展,提高了果蔬采摘机器人的自动化水平。许多国家开展大量研究,成功研究出仅适用于简单工作环境的果蔬采摘机器人。我国的果蔬采摘机器人发展较晚,于20世纪90年代首次提出果蔬采摘机器人,但在多家院校、学者的共同努力下,我国果蔬采摘机器人的研究取得了许多成果。中国农业大学张铁中[2]提出了基于BP视觉网络的草莓图像分割法,但此方法需要通过大量的样本训练才能将输入图像通过计算机权值获得所期望的输出图像。中国农业大学研发了“采摘童一号”草莓采摘机器人,但该款机器人仅适用于高架草莓的采摘,目前还没有生产出一款能应用于实际农业中的草莓采摘设备。周云山和李强等研究蘑菇采摘机器人,该系统主要由蘑菇传送带、摄像机、采摘机器手、三自由度气动伺服机构、机器手抓取控制系统和计算机等组成。但目前的果蔬采摘机器人还是不成熟的,仍存在果实识别率、定位精度低,果实损伤率较高,果蔬采摘机器人采摘周期长等问题,造成一些果实成熟不及时采摘而腐烂的现象。
2 总体方案结构设计
为解决目前草莓采摘机器人果实识别率低、定位精度低、果实损伤率较高和采摘周期长的问题,在中国农业大学研发的“采摘童一号”草莓采摘机器人的基础上,提出了一套适用于大棚中的草莓采摘机器人机械结构思路,其总体方案布局如图1所示,与以往的采摘机器人相比,此次设计的机械结构通过主轴上的滑块与导轨来带动机械手,让机械手的运动范围更广泛,采摘面积更大。并设计了草莓的运输装置和存储装置,实现采摘、运输、装盒一体化的过程,大大降低了人们的劳动强度。图像识别系统运用了双目立体识别技术能够更好的提高果实的定位精度,控制机械手来实现更准确的采摘。设计的关键点在于:如何正确识别成熟草莓、快速准确和高效率的采摘草莓机械手设计、采摘草莓的中间运输过程和储存问题、采摘装置的准确快速运动和定位。

图1 总体方案布局
2.1 采摘机器手与存储装置
该机构主要是由旋转装置、滑动导轨、伸缩活塞、机械手指等几部分构成,其采摘机械手三维模型如图2所示。该装置主要用于采摘成熟草莓,滑动装置与旋转装置通过过盈配合连接在一起,旋转装置轴承连接主轴上,机械手与伸缩活塞相连接一同固定在滑块上,可跟随滑块在导轨上做滑动。该装置的设计优点在于采摘的范围较大,能够采摘到以主轴为圆心、导轨为半经的圆形面积范围内的草莓。该机械手设计了四根机械手指,深度模仿了人抓取物体时的场景。
用两个CCD摄像机定位装置确定成熟草莓的位置和采摘点,主轴带动机械手旋转、滑块在滑轨上运动带动机械手运动到草莓的正上方,此时活塞伸长,带动机械手下降,气动马达伸长,机械手指张开,切断草莓果茎,成功采摘到草莓后、气动马达缩回,机械手整体缩回并旋转到固定的位置,机械手指松开,把草莓放到存储装置中,存储装置如图3所示,连续重复上述采摘过程30次,将存储装置装满后,然后把已经采摘的草莓从外围支撑板运送到提升装置,提升装置上升,到达存储箱体的空余位置,然后把存储装置运出到存储箱体的固定位置,接着提升装置向下运动到下一次,通过同步带从下一次运出空的草莓盒子,接着把空的存储装置运送到刚才地方,等待下一次的运送。

图2 采摘机械手 图3 存储装置
2.2 草莓运送装置
该结构主要是使用丝杠螺母和皮带的结合,通过皮带摩擦把草莓盒子运送到提升装置上,经过丝杠的旋转带动提升装置把装满的草莓盒子运送到存储箱对应高度的位置,使用旋转装置把装满草莓的草莓盒子转到空的箱体位置,然后再通过皮带把草莓盒子传送到存储箱相对应的位置。此装置是通过电机的带动轴的转动,啮合的齿轮,实现在水平面内的转动,实现将草莓存储盒带到该水平高度想要的位置的功能,此装置再与提升装置相配合就能在水平高度上运动,这样一来,极大的增加了运动的范围,可以更方便的将储存箱送到想要的位置,其草莓运输及相对应的旋转装置如图4所示。

图4 运输装置三维模型
2.3 同步啮合带参数设计
此设计中涉及到同步啮合带来传送草莓盒子和运输空草莓盒子,同步啮合带的具体设计参数如下。
在此次设计当中同步带的工作环境为低速,轻载,所以同步带的型号可以任意选取,现选取周节制,型号为H,查表得节距pb=12.7 mm,齿形角2β=40°,齿根厚s=6.12 mm,齿高ht=2.29 mm,带高hs=4.3 mm,带宽度bs=76.2 mm,齿根圆角半径=齿顶圆角半径rr=ra=1.02 mm。

根据以上公式计算后查表选用规格为260 H的带,节线长度为LP=660.40 mm,则:
2.4 图像识别系统
物体的运动算法大多采用传统的单目识别技术,单目识别技术对于静止的物体很容易实现识别,精度较高。但单目识别技术只具有有限的观测范围,移动的物体很容易超出这个观测范围,并且不能识别出物体的三维坐标,更不能判断出物体的形状和大小。
草莓的种植环境一般位于大棚之中,大棚的环境条件为地垄截面呈等腰梯形,垄顶宽L1=400 mm, 垄底宽L2=600 mm, 垄高L3=250 mm,垄沟宽度L4=150~200 mm,草莓果实长出后伏在垄的侧面,果梗上方与垄壁有 10~20 mm的间隙。
采摘机器人的图像识别系统是基于单目识别的基础上并结合草莓的种植环境提出了改进的双目立体识别技术。双目立体识别技术是一种模拟人眼从两个不同的视野来更加准确的采集物体形状、位置、大小等信息的技术,用两个摄像头在不同位置去观察物理,运动的物体运动出一个摄像头的监控范围,另一个摄像头还可以对物体进行监控,跟单目识别技术相比,双目识别技术监控的范围更广泛,采集信息更准确,也能采集单目识别技术采集不了的深度信息,再通过计算机准确的计算出其三维模型。其原理主要是由两个参数彼此一致的摄像头,其光轴平行且垂直于基线,双目立体识别技术原理如图5所示。

图5 双目立体识别技术原理图
2.5 提升系统
提升装置主要利用运输装置上螺母在丝杠上运动起到提升的作用,其原理图如图6所示。
设计方案利用滚珠丝杠的优点在于:由于滚珠丝杠副的丝杠轴和丝杠螺母之间有许多滚珠滚动,可以获得较高的运动效率。与以往的滑丝杠副相比,驱动力矩小于1/3,即实现相同运动结果所需的功率为滑丝杠副的1/3,又有助于节省电力。并且滚珠丝杠副由于利用滚珠运动,所以启动力矩极小,不会出现滑动运动那样的爬行现象,能保证实现精确的微进给。
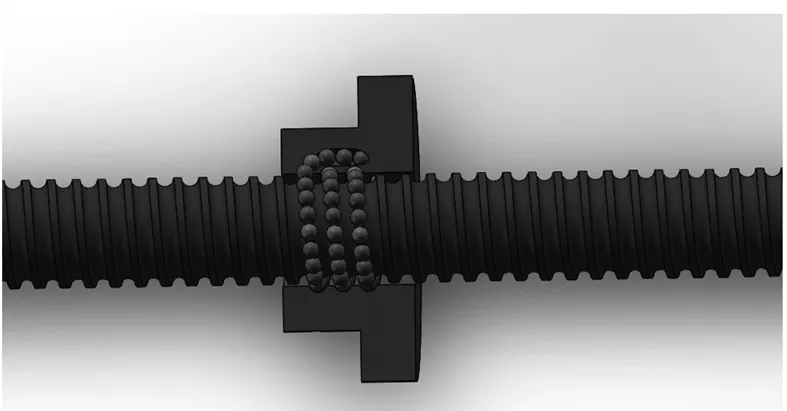
图6 滚珠丝杠三维图
3 设计可行性分析
通过以上设计及对各个部分原理的分析,最后通过三维软件建模进行运动仿真分析,生成完整的动画,所设计的草莓采摘机器人能够完成所预期的采摘、装盒、运输动作,其各个动作如图7~9所示。

图7 采摘动作 图8 装盒动作 图9 运输动作
分别对关键零部件齿轮、轴承等进行了强度校核且均满足要求。此草莓采摘机器人的机械结构设计对后续的实体制作、设备调试具有一定的指导意义。
此次设计的草莓采摘机器人机械系统,相比其他的采摘机器人,结构简单,成本低,易于制造和维护。主要零部件选用均按最优化原则设计,达到消耗最少,污染最少的情况下完成生产,并且可以直接外购。提升系统部分采用丝杠螺母传动的形式,效率较高,能量损失较少,同时传动平稳,使得机械系统在传动过程中的噪声降低到一定程度。草莓采摘机器人的机械系统主要采用电机传动、齿轮、皮带和气缸传动,基本上没有污染物和垃圾排放。其次采摘效率高,机构简单,易于维护,操作简单,制造成本低,在一定程度上最大可能的降低了成本,提高了性价比。
4 结 语
介绍了国内外的采摘机器人研究现状,结合了草
莓种植的环境,对草莓采摘机器人的采摘机械手、存储装置、旋转装置和提升系统部分进行了类比设计,又结合了草莓的种植生长环境提出了改进的双目立体识别技术,完成了有关运输装置的同步啮合带的设计。设计的采摘机器人目前处于研发向推广使用的过渡阶段,对于采摘机器人投入到农民手中使用还有较长的路要走,仍需要大量学者的共同努力,进行深入的研究,不断的改进和完善现有的采摘机器人和开发其新功能,深入到机械本体的优化设计、路径规划、运动控制和机器后期维护与保养方面的研究。相信在诸多学者的共同努力之下,在不久的未来,采摘机器人会从实验室走进农民的田地中,采摘机器人技术也会越来越成熟并最终实现商业化。
