基于多核主动学习和多源数据融合的农田塑料覆被分类
2022-03-14冯权泷牛博文朱德海刘逸铭刘建涛
冯权泷 牛博文 朱德海 刘逸铭 欧 聪 刘建涛
(1.中国农业大学土地科学与技术学院, 北京 100083; 2.自然资源部农用地质量与监控重点实验室, 北京 100193; 3.中国移动通信集团广东有限公司, 广州 510623; 4.山东建筑大学测绘地理信息学院, 济南 250101)
0 引言
农田塑料覆被(如农业塑料大棚、地膜覆盖等)对提升农产品产量及其经济效益起到重要作用,是农业现代化建设的重要部分,是农业形式由粗放型向集约型转变的重要手段[1-3]。其中,地膜对抑制杂草生长、保持土壤水分、调节土壤温度有着积极作用[4];而农业塑料大棚拥有更多的配套设施,能满足更多农产品的生长条件,可以对当地农产品产业结构的建设和调整起到促进作用[5]。因此,实时、高效地监测农田塑料覆被对农业产业发展有着重要意义。遥感技术具有宏观、动态、快速等特点,利用遥感技术手段可以摆脱传统人工方法低效、实时性差等劣势,能够可靠、高效地获取农田塑料覆被地物目标,进而达到实时动态监测的目的[6-7]。
在遥感影像分类领域,支持向量机(SVM)得到了广泛应用[8-13],并被引入到农田塑料覆被制图中[14-15]。具体而言,文献[14]利用WorldView-2卫星影像和SVM分类器,对土耳其的库姆鲁卡地区的农业塑料大棚进行了提取,其总体分类精度为90.28%,精度超过了随机森林以及最大似然分类器[14]。SVM的优异表现,得益于其对最佳分类超平面的定位能力[9],仅需要有限的支持向量即可实现较好的分类效果[16]。同时,考虑到不同核函数对SVM分类性能的差异性,因此通过组合一簇核函数从而构成多核学习模型,即可实现光谱特征、纹理特征等的有效融合,从而提高分类精度[17]。其中,文献[18]提出了一种基于多核SVM的高光谱影像分类方法,结果表明在融合光谱和形态特征的情况下,多核SVM精度超过了单核SVM,前者的最优精度为91.05%。文献[19]基于多核SVM对多源遥感数据进行了分类研究,同样证明了多核SVM的分类性能。
同时,在遥感影像分类研究中,主动学习得到了广泛应用。主动学习可以筛选出不确定性最大以及最具代表性的样本,从而有效降低训练样本的数量,并提升训练效率[20-23]。其中,文献[24]在森林退化遥感监测中,分别提出了基于启发式的主动学习方法,结果表明主动学习方法具有更高的分类精度,并能有效提高模型的收敛速度。文献[25]利用多源Sentinel-1和Sentinel-2影像和主动学习方法进行林木年龄的估算,试验结果验证了主动学习的优势,在达到相同估算精度的情况下,主动学习的训练样本数量可减少50%左右。
综上所述,多核学习、主动学习在遥感影像分类中均取得了优异的性能。然而在农田塑料覆被制图的研究中,上述算法尚未得到深入研究。同时以往的研究并没有很好解决农业塑料大棚和地膜的混淆问题。因此本文研究一种多核主动学习模型,以提高小样本下农田塑料覆被的制图精度。具体而言,本文基于Google Earth Engine(GEE)云计算平台,通过引入多源多时相Sentinel遥感影像,提取光谱特征、纹理特征等构建多维特征空间,并构建多核学习模型对多源多时相特征进行融合,最后构建基于池的主动学习策略,提升分类模型在稀疏样本下的泛化能力。
1 研究区与数据源
1.1 研究区概况
图1所示为本文研究区,位于山东省聊城市与莘县交界地区,东经115°35′~115°51′,北纬36°22′~36°16′,面积约为300 km2,是典型的农业塑料大棚、地膜交错区域。研究区位于华北平原中部,地势平坦,属于温带季风气候,雨热同季,年平均气温为13.4℃,年平均降水量在501.9 mm左右。
1.2 数据源
本文采用Sentinel-1雷达卫星以及Sentinel-2光学卫星影像作为数据源。其中Sentinel-1由两颗极地轨道合成孔径雷达卫星组成,可在多云或缺少光照的条件下进行正常成像。Sentinel-2由两颗多光谱光学卫星组成,具有较高空间分辨率(包含中心波长10、20、60 m的波段),重访周期为5 d,具有较高的实时性,已广泛应用于作物分类、土地管理、灾害监测等领域。在本文中,分别选取2019年5月10日至2019年6月1日以及2019年10月15日至2019年10月31日的Sentinel-1和Sentinel-2的两幅遥感影像,通过GEE中的median()函数计算并输出遥感影像。
所选样本的土地利用类型分为3类:农业塑料大棚、地膜和其他土地利用类型。样本数据划分为初始训练集、验证集、测试集和未标记样本池。在初始训练集(125个样本)中,农业塑料大棚、地膜和其他土地利用类型的数量分别为35、15和75;验证集中,农业塑料大棚、地膜和其他土地利用类型的数量分别为84、36和180;测试集中,农业塑料大棚、地膜和其他土地利用类型的数量分别为300、119和581。
同时,本文基于GEE云计算平台对Sentinel-1和Sentinel-2影像进行预处理。其中对Sentinel-1雷达影像进行辐射定标、斑点噪声去除等操作,对Sentinel-2光学影像进行辐射定标、大气校正、正射校正等操作。此外,还基于GEE进行光谱特征、纹理特征等的计算,从而为分类提供一个多维特征空间。
2 研究方法
2.1 总体技术路线
本文通过引入多源多时相卫星遥感数据,构建多核主动学习模型进行农田塑料覆被制图的研究,总体技术路线如图2所示。
如图2所示,首先通过GEE云计算平台进行遥感数据的选取和预处理;然后计算其光谱、纹理等特征,并与原始遥感数据进行波段叠加,从而得到多维特征空间;下一步构建多核学习模型,对多源多时相数据进行自适应融合,最后通过构建主动学习策略对分类模型进行训练,并利用测试样本对模型精度进行评价,最终输出研究区的农田塑料覆被空间分布结果。
2.2 特征提取
2.2.1光谱特征
通过文献[1-2,7]以及前期分类试验,本文共选择NDVI(归一化植被指数)、EVI(增强植被指数)、MSAVI(改进的土壤调节植被指数)、NDBI(归一化建筑指数)、MNDWI(改进的归一化差异水体指数)等5个光谱指数作为光谱特征。其中NDVI[26]主要反映植被的生长状况,可用于提升植被与塑料覆被之间的差异;EVI[27]和MSAVI[28]都是NDVI的改进指数,可以进一步削弱土壤和大气的影响,以进一步提升植被与塑料覆被之间的区分度;NDBI[29]主要用于提取人工建设用地;MNDWI[30]用于提升水域的区分度。
2.2.2纹理特征
通过目视解译和实地采样发现,农业塑料大棚和地膜的几何、纹理特征较为明显,因此采用以下6个最不相关的纹理特征:均值(MEA)、标准偏差(STD)、同质性(HOM)、相异度(DIS)、熵(ENT)和角度秒矩(ASM)[1],用来进一步提升设施农业目标地区同其他类型地物的分离度。在计算纹理特征时,采用3×3大小的滑动窗口。
2.3 多核主动学习模型
2.3.1多核学习
在SVM的研究中,核函数的提出在一定程度上解决了非线性数据的线性可分问题以及多特征数据中的“维度灾难”问题,然而经典的单核学习方法在学习多维空间的多特征时往往性能不佳[31]。同时在遥感分类中,多特征(如光谱特征、纹理特征等)得到了广泛应用,而多核学习能够根据不同特征的特性构建合适的核方法,从而实现对多维特征的有效学习[18,32-33]。
多核学习的一般表达式为
(1)
多核学习的常见构造形式包括合成核、多尺度核、无限核等,本文采用多尺度核进行多核学习模型的构建,原因在于多尺度核的方法更为灵活,并能提供较为完整的尺度选择机制。具体而言,多尺度核首先采用大尺度核对分类决策面平滑区域的样本进行拟合,再用小尺度核对分类决策面变化相对剧烈的样本进行拟合,同时进行逐级优化,从而得到更为精确的分类结果。在本文中,基于多尺度径向基核函数进行多核学习模型的构建,公式为
(2)
其中
k(x,z,γi)=exp(-γi‖x-z‖2)
(3)
式中αi、γi分别表示权重、径向基核的值。通过上述多核学习模型的构建,可以实现多源、多时相遥感数据的特征级融合,从而提高不同地物之间的类间可分性,改善农田塑料覆被分类的精度。
2.3.2主动学习
在经典的监督学习中,分类问题的解决依赖于大量的训练样本,通过不断增加样本数量进而提升分类精度。然而训练样本的标注往往费时费力,因此设计一种学习策略,在减少人工标注工作量的同时提升模型的学习效率和分类精度,就成为了一个重要问题。在这一背景下,主动学习的算法框架被提出,并成功应用于遥感影像分类等领域。
具体而言,主动学习的主要思想表述如下:通过设计样本查询算法对未被标记的样本进行查询,从而完成样本池中候选样本的排序,并选择最具有代表性的未标记样本交由标注专家或人工定义的专家系统进行类别标注,重复上述过程,直到满足算法停止条件为止[34-36]。由此可见,主动学习的目标就是利用最少的样本标注,得到最优的模型。
在本文中,采用的主动学习策略如下:构建包含125个样本的初始样本集X,利用其对多核学习模型进行训练,之后加入主动学习策略,对未标记样本池U中的样本计算其不确定性(信息熵),选择信息熵最大的样本q,并对其赋予标签,并将其添加到样本集X中,并继续对多核学习模型进行训练,如此往复,直至模型达到目标精度。同时,在试验开始前从训练集中划分300个样本作为验证集,用以在线监测模型的精度。经过500次查询,样本集X中的样本扩充至625个,最终在第410次查询前后得到收敛精度。
2.4 精度评价
在完成多核主动学习模型的训练后,使用测试集(1 000个样本)进行精度计算,并输出混淆矩阵、总体分类精度、Kappa系数以及其他精度评价指标作为定量评价依据。除此之外还将输出农田塑料覆被分类结果,通过目视解译的方法定性评价模型分类性能。
3 结果与分析
3.1 总体结果分析
基于本文的多核主动学习模型,对多源多时相Sentinel卫星影像进行分类,得到的农田塑料覆被分类结果如图3所示。
如图3所示,本文构建的多核主动学习模型可以实现农田塑料覆被的精确提取。其中,农业塑料大棚主要分布在研究区的西部以及东北部地区,在东南部地区和中部地区则呈零星分布;地膜主要分布在研究区的中部以及东南部地区,在西部地区呈零星分布。通过对比原始遥感影像,本文模型的分类结果与农业塑料大棚和地膜的实际分布情况高度一致,具有较好的分类效果。
同时,农业塑料大棚与地膜之间的混分情况较少,分类错误主要集中在农业塑料大棚/地膜与其他地物(尤其是人工建设用地)之间。其原因在于人工建设用地的反射率和后向散射系数均较高,并与农业塑料大棚/地膜存在一定的相似性,最终导致了混分。从图像细节(图3b)可以看出,混分并不是存在于单个地物中,而是存在于不同地物之间的交界处,这主要受限于Sentinel影像的空间分辨率,因为单个像素仅能表示10 m×10 m的空间范围,导致不同地物边缘存在混合像元现象,从而在地物的边缘容易产生分类错误,这样就造成了地物之间的混分。
同时,基于测试集进行模型精度评估,计算混淆矩阵、总体精度、Kappa系数等,结果如表1所示。
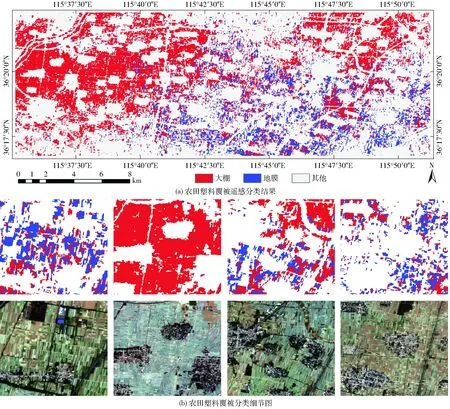
图3 基于多核主动学习的农田塑料覆被制图结果Fig.3 Agricultural plastic cover mapping results based on multi-kernel active learning
由表1可知,农业塑料大棚和地膜的分类效果较好,模型的总体分类精度为95.6%,Kappa系数为0.922,农业塑料大棚的F1值为0.96,地膜的F1值为0.89。
3.2 单源与多源数据的分类精度
为了验证多源数据对农田塑料覆被制图的贡献,设计了对比试验,对单源与多源数据的分类结果和精度做了比较,具体试验设置为:使用Sentinel-1的多时相雷达影像进行分类;仅使用Sentinel-2的多时相光学影像进行分类;同时使用多时相雷达和光学影像进行分类。
上述试验的分类结果如图4所示。图4表明,相比于单源遥感影像分类,多源遥感影像的引入可以提高分类效果。这是由于多源遥感影像包含更多的地物信息,能够更好反映目标地物的相关特征,分类的细致度较单源遥感影像更好。同时,图4a表明,仅使用Sentinel-1雷达影像,其分类效果过于破碎,经目视解译发现,部分裸地和建设用地被错分为农业塑料大棚和地膜,同时农业塑料大棚和地膜之间也多有混分的情况出现。从图4b可以看出,仅用Sentinel-2光学影像,相较于仅用Sentinel-1雷达影像具有更优的分类结果,而联合使用光学和雷达影像取得了最好的分类效果(图4c)。
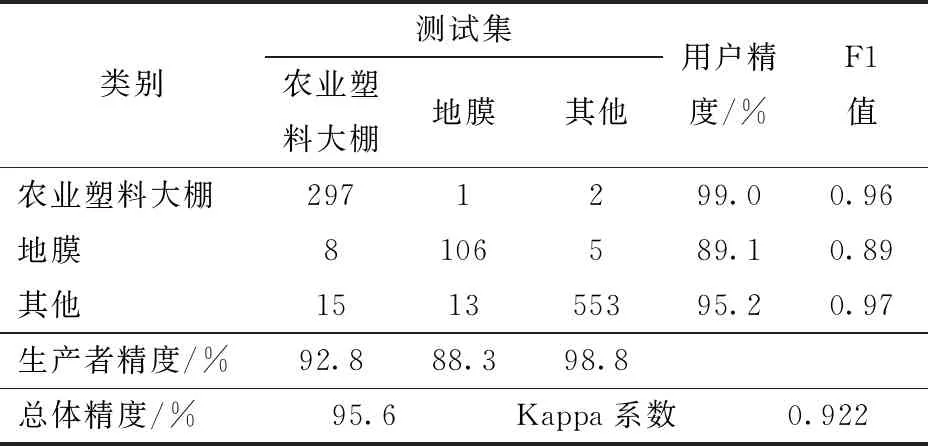
表1 混淆矩阵、总体精度和Kappa系数Tab.1 Confusion matrix, overall accuracy and Kappa coefficient
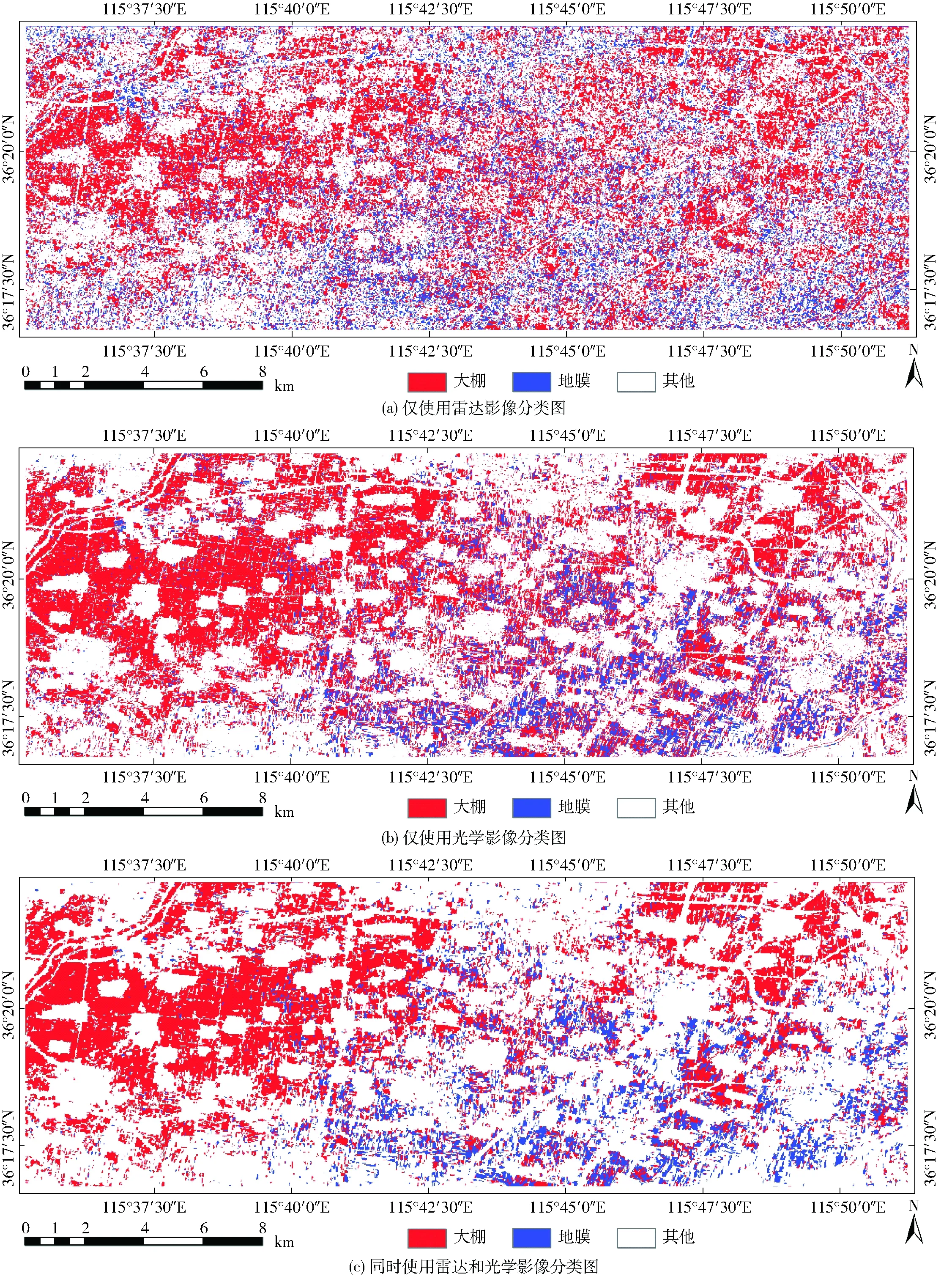
图4 基于不同数据源的农田塑料覆被制图结果Fig.4 Agricultural plastic cover mapping results based on different data sources
表2列出了单源和多源的遥感分类精度,结果表明,仅使用雷达影像进行分类的精度最低,较仅使用光学影像分类的精度下降23.2个百分点。究其原因,在仅使用雷达影像分类时,采用后向散射系数作为分类依据,导致不同地物之间的可分性较差,从而无法获取精确的农田塑料覆被分类结果。同时Sentinel-2可提供地物的多光谱反射信息,相比于雷达影像可有效提高地物的可分性,从而取得更好的分类结果。而通过光学和雷达影像的联合使用可以进一步提升地物之间的可分性,从而提升分类精度,这与文献[37-38]的结论一致。
3.3 单时相与多时相遥感影像分类精度对比
为了验证多时相数据对于农田塑料覆被分类精度的贡献,设计了对比试验,分别使用单时相影像和多时相影像进行分类试验。具体而言,本文选取的单时相影像的成像时间为2019年10月15—31日期间,此时农业塑料大棚和地膜同时存在。结果如图5所示。
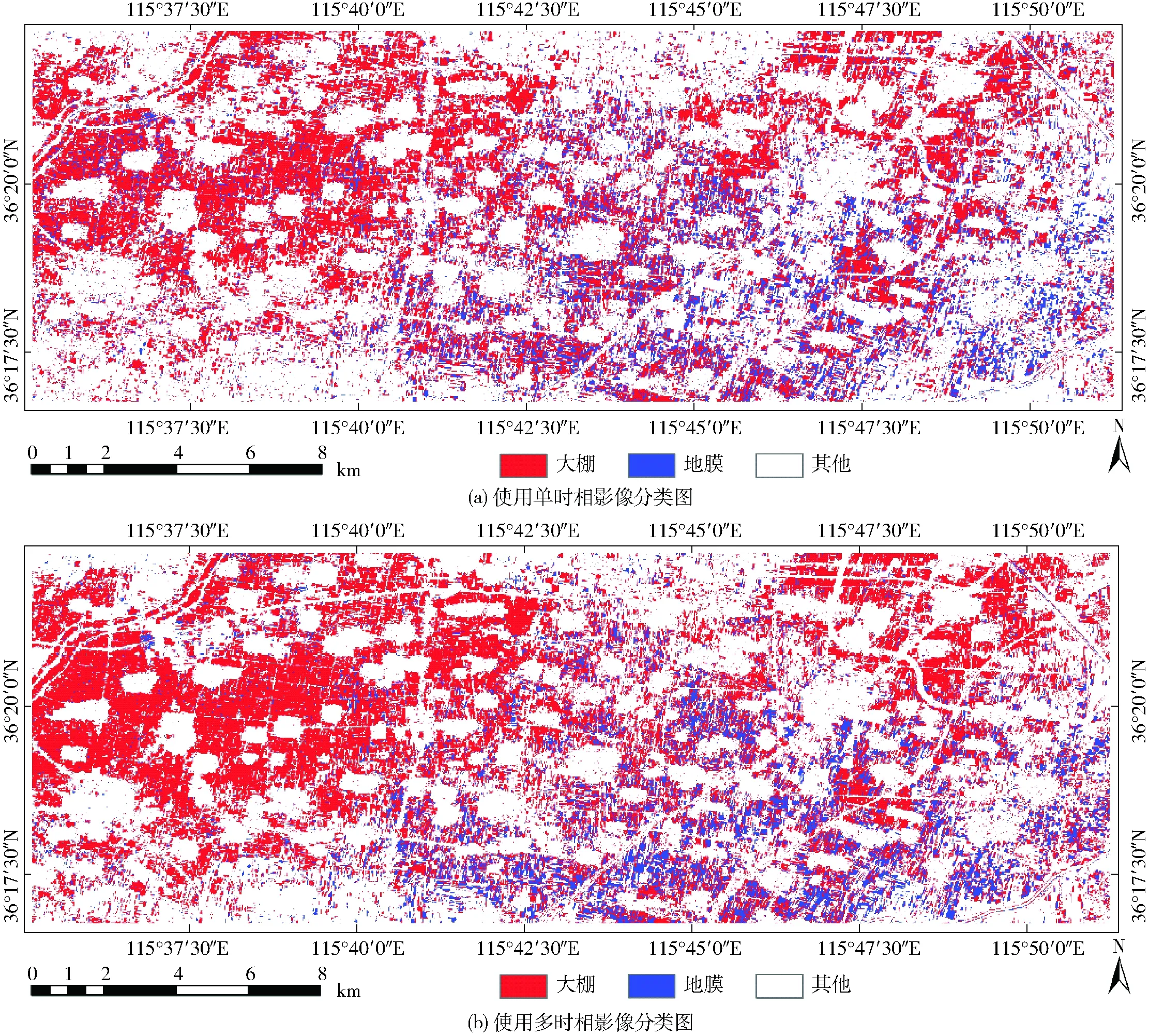
图5 基于不同时相遥感影像农田塑料覆被制图结果Fig.5 Agricultural plastic cover mapping results based on different temporal data
图5表明,仅使用单时相影像进行分类,农业塑料大棚、地膜以及其他地物之间的混分现象较为严重,尤其是农业塑料大棚和地膜之间的混分现象尤为突出。如图5a所示,在农业塑料大棚的连片区域内增加了许多“地膜”,这是由于在仅使用单时相影像进行分类时,塑料大棚和地膜都呈现为白色,其光谱反射和后向散射系数均相近,导致了错分。为了提高农业塑料大棚和地膜之间的可分性,本文引入地膜覆盖之前时相的影像(5月),这是因为在这两个时相内,农业塑料大棚一直存在,而地膜则表现出存在和不存在两个状态,多时相数据的引入可以有效反映地膜存续的时间梯度信息,因此具有更好的分类效果。

表2 不同数据分类精度对比Tab.2 Classification accuracy of different data sources
表3给出了不同时相分类精度的对比结果,可以看出,相比于单时相分类,多时相数据的引入可以将分类精度从91.9%提高到95.6%,这主要因为多时相数据考虑了地膜的存续时间,通过film-on(存在地膜)和film-off(不存在地膜)两个时相影像的引入,可以有效捕捉地膜的物候特征,从而提高其与农业塑料大棚的可分性。
3.4 不同分类模型的精度对比
3.4.1主动学习的精度
为了验证主动学习在农田塑料覆被分类中的性能,本节计算了主动学习与非主动学习(被动学习)在不同标记样本数量下的精度,如图6所示。
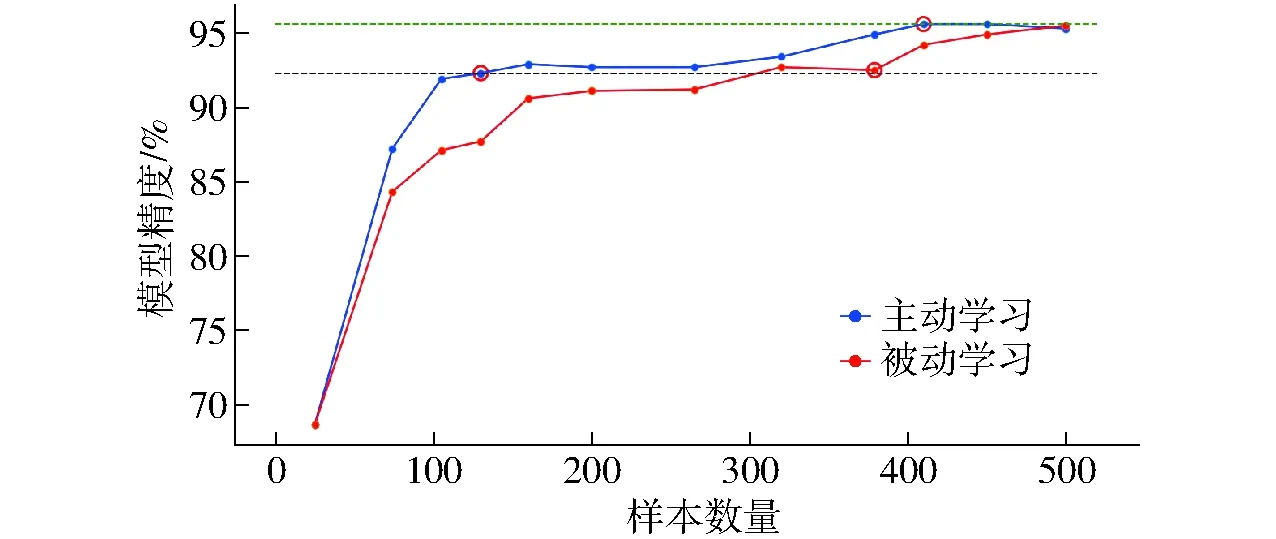
图6 主动学习和被动学习精度变化曲线Fig.6 Active learning model vs passive learning model
由图6可以看出,在多核SVM模型中添加主动学习策略,模型收敛更快。主动学习在样本数量达到410个时,模型趋于收敛,而被动学习在达到500个样本点时,模型才趋于收敛。由此可见主动学习在达到最优精度时,可以减少18%的训练样本数量。
此外,图中黑色虚线y=92.3%表示在相同精度下,主动学习所需要的样本数量比被动学习少得多;图中绿色虚线y=95.6%表示,主动学习较被动学习需要更少的样本数量达到最优精度。同样达到精度92.3%,主动学习仅需130个标记样本,而被动学习则需要265~320个样本,是主动学习的2倍多。因此主动学习策略在样本稀疏条件下更有优势。
3.4.2多核学习和其他分类方法比较
同时为了进一步验证多核学习在农田塑料覆被分类中的优势,设置了对比试验,通过对比单核支持向量机 (SVM)、随机森林 (RF)、K近邻 (KNN)、决策树 (DT)、AdaBoost等模型,为了保证可比性,均选用初始样本集进行训练。同时由于本节主要对比不同分类器的性能,因此在训练过程中并不增加主动学习策略。精度对比如表4所示。
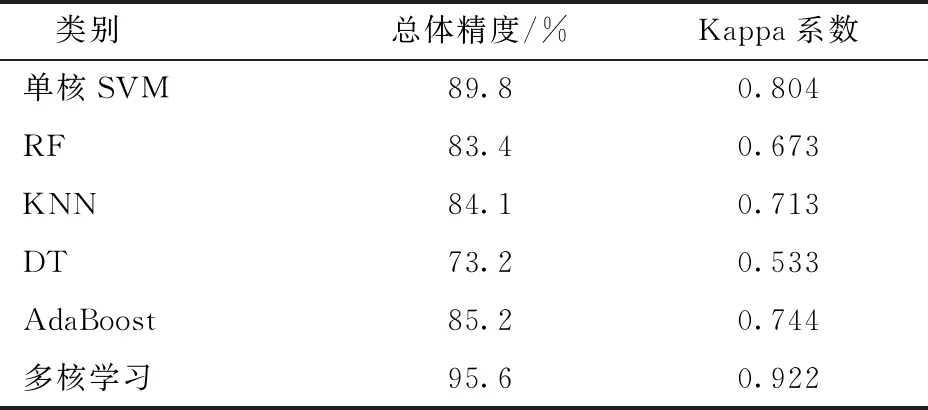
表4 不同分类器的分类精度对比Tab.4 Classification accuracy of different classifiers
由表4可知,本文所构建的多核学习模型的分类精度均高于其他模型。在其他分类器中,单核SVM的分类精度最高(89.8%),然而多核学习的精度较其提高了近6个百分点。究其原因,多核学习采用一簇核函数对多特征数据集进行自适应学习,从而能够结合不同核函数学习的优势,更加适合多源多时相遥感数据的融合,最终达到更优的农田塑料覆被分类效果。
4 结论
(1)将多核SVM和基于池的主动学习策略进行耦合,构建了一种多核主动学习模型以进行农田塑料覆被的遥感分类,总体分类精度为95.6%,Kappa系数为0.922;相比于传统经典机器学习模型:单核支持向量机、随机森林、K近邻、决策树、AdaBoost,多核学习模型精度可较上述模型提高5.7、12.1、11.4、22.3、10.3个百分点;且在相同的分类精度下,主动学习较被动学习可减少标签样本一半以上,更适合小样本条件下的影像分类任务。
(2)通过引入多源多时相遥感影像,提高了不同地物之间的可分性,从而取得了更好的农田塑料覆被制图效果。相比于单源雷达和光学数据,多源数据可平均提升分类精度12.7个百分点;同时多时相数据可提高分类精度3.7个百分点。