形式背景下的技能约简与评估
2022-03-13周银凤李进金
周银凤,李进金
闽南师范大学 数学与统计学院,福建 漳州363000
知识空间理论(knowledge space theory,KST)是由美国数学心理学家Falmagne 和比利时数学心理学家Doignon 于1985 年首先提出的用数学的方法对学习者进行知识评价及学习指导的一种数学心理模型。目前KST 主要运用于辅助学习与自适应测评领域,在RATH(relational adaptive tutoring hypertext)和ALEKS(assessment and learning in knowledge spaces)等学习和评价系统中得到广泛的应用。
形式概念分析(formal concept analysis,FCA)是由德国学者Wille 提出的一种从形式背景建立概念格来进行数据分析和规则提取的强有力工具。目前FCA 已被广泛地研究,并应用到机器学习、软件工程和信息获取等领域。
1996 年Rusch 和Wille对知识空间理论与形式概念分析间的联系进行了研究,提出了由形式背景构造知识空间的方法。这为形式概念分析在教育与心理学等领域的应用奠定了基础。Spoto 等将知识空间理论与形式概念分析相结合,基于技能映射的合取模型,提出了由形式背景构造知识空间的方法。李进金等对形式背景与知识基的联系进行了研究,提出了由形式背景构造知识空间的另一种方法。
知识结构主要运用于评估学习者的知识和指导未来的学习。如何构建学习者准确的知识状态和知识结构是知识空间理论的重点研究问题。Doignon等通过技能映射建立了问题与技能之间的联系,提出了由技能映射诱导知识状态,构建知识结构的方法。知识空间理论中,问题与技能之间常见的关系主要有两种,分别对应着两种不同的模型,即“析取模型”与“合取模型”。技能映射在析取模型下所诱导的知识结构为知识空间,在合取模型下所诱导的知识结构为闭包空间。Spoto 等通过定义一个双射,将给定的知识结构与技能映射联系起来,对给定的知识空间或闭包空间,构建在相应模型下诱导它的技能映射。
Rusch 等将测试者视为对象,将用于测试的问题视为属性,研究知识空间与形式背景间的联系。测试者需要掌握某些技能或具有某项能力才能解决相应的问题。若测试者没有掌握某些技能或不具备某项能力,则无法解决相应的问题。本文视技能为对象,问题为属性。进一步研究知识空间理论与形式概念分析间的联系。
学习者对技能的学习过程是一个特殊的概念认知学习过程。李金海等认为概念认知学习是通过具体的认知模型从给定线索中学习概念,以模拟人脑进行概念学习的行为。在知识空间理论中,技能代表潜在的能力,无法直接由测试得到。可以根据学习者对测试题的回答情况来确定其知识状态,对其技能进行评估,判断其技能掌握情况。不同的技能可能与同一问题的求解相关,于是掌握不同技能的学习者可能具有相同的知识状态,即存在冗余技能。Doignon 在文献[19]中提出了极小技能映射的概念。高纯和Xu 等在文献[20-21]中对极小技能集的概念和生成方法做了进一步的研究。
本文基于技能与问题之间的关系,提出技能背景的概念。首先通过建立技能背景的概念格,快速构建相应技能映射所诱导的知识空间和闭包空间。其次通过寻找所有问题的原子得到知识基,并讨论保持知识基不变的技能约简问题。随后基于知识基,讨论由知识空间和闭包空间得到技能背景的过程。最后基于技能背景,讨论技能评估与学习路径的选择问题。
1 预备知识
1.1 形式概念分析概述
三元组(,,)称为一个形式背景,其中={,,…,x}称为对象集,={,,…,a}称为属性集。任意x∈(=1,2,…,)为一个对象,任意a∈(=1,2,…,)为一个属性。⊆×是与之间的二元关系。若(,)∈,则称对象具有属性;若(,)∉,则称对象不具有属性。
定义2设(,,)为形式背景,在对象集⊆和属性集⊆上分别定义运算:

其中,表示中所有对象共同具有的属性集合,表示具有中所有属性的对象集合。
特别地,记{}=,表示对象所具有的属性集合;记{}=,表示具有属性的对象集合。
若二元组(,)满足=且=,则称(,)为形式背景(,,)的一个形式概念(简称概念)。其中为形式概念的外延,为形式概念的内涵。
用(,,) 表示形式背景(,,) 的全体概念。对于(,),(,)∈(,,),记:

则“≤”是(,,)上的偏序关系。且定义:

则(,,)对运算⋂和⋃是封闭的,从而(,,)是完备格,称之为相应于形式背景(,,)的概念格。
1.2 知识空间理论概述
知识状态是知识空间理论中的核心概念之一。知识状态是指在非空问题集={,,…,q}中,学习者在理想状态下所能正确解决的问题集合,记为。所谓理想状态是指学习者在没有受到外界压力或情绪干扰的情况下,没有由粗心导致的错误和由侥幸猜对的情况。
若K 是由非空问题集的子集构成的知识状态集族,且K 至少包含∅和,则称(,K)为知识结构(knowledge structure)。
在问题集明确的情况下,有时可直接用K 表示知识结构。
若K 满足并封闭,即对∀K,K∈K,有K⋃K∈K,则称(,K)为知识空间(knowledge space);若K 满足交封闭,即对∀L,L∈K,有L⋂L∈K,则称(,K)为闭包空间(closure spaces)。
定义4设G、G分别为两个集族,若G包含G 中所有有限个元素的并组成的集合,则称集族G是G 的张成(span),记为S(G)=G,或称G 张成G。
显然,由G的定义可知G是并封闭的。对知识空间(,K),由知识空间的定义可知K 满足并封闭。若B 是张成K 的最小子集族,则称B 是K 的基(base),且约定∅∉B。
李进金等称知识空间的基为知识基。基张成知识空间,即基包含了知识空间的所有信息,是反映学习者能够掌握的最基本的知识状态的集族。若(,K) 是一个有限的知识空间,则K 有且仅有一个基。本文只讨论知识空间有限的情形。
设F 为非空集族。对∀∈⋃F,F 中含有的极小集合称为的原子(atom)。若对∈⋃F,是的原子,则称∈F 为一个原子。
某个问题的原子可能不唯一,且有限的知识结构中每个问题至少有一个原子。若知识空间K 的基为B,则B 是由K 的所有原子构成的集族。
定义6三元组(,,)称为一个技能映射,其中为非空问题集,是与相对应的非空技能集,是从到2{∅}的映射。对∀∈,()⊆表示与问题的求解相关的技能集合。若∉(),则技能与问题的求解无关。
技能映射具有多种模型,本文主要考察“合取模型”与“析取模型”。“合取模型”表现为“与”的关系,即学习者需要掌握与问题的求解相关的所有技能,才能解决问题。“析取模型”则表现为“或”的关系,即学习者只需掌握与问题的求解相关的某些技能便能解决问题。
对技能子集⊆,在析取模型下确定的知识状态为={∈|()⋂≠∅}。遍历的子集所确定的知识状态构成的集族K 称为由技能映射(,,)通过析取模型诱导的知识结构。在合取模型下确定的知识状态为={∈|()⊆}。遍历的子集所确定的知识状态构成的集族L 称为由技能映射(,,)通过合取模型诱导的知识结构。
经数学心理学家Falmagne 等的研究发现,技能映射通过析取模型诱导的知识结构是一个知识空间,通过合取模型诱导的知识结构是一个闭包空间。对同一技能映射,通过析取模型与合取模型所诱导的知识结构互为对偶结构。
设(,,)为技能映射,若对∀∈,在相同模型下,技能映射(,-{},τ)诱导的知识结构都异于(,,)诱导的知识结构,则称(,,)为极小技能映射,为极小技能集。
定义8设和′是与问题集相对应的且不相等的非空技能集,若存在一一映射:→′,使得对∀∈,有′()=(())={()|∈()},则称技能映射(,,)和(,′,′)同构。
显然,在相同模型下,两个同构的技能映射诱导相同的知识结构,但诱导相同知识结构的技能映射不一定同构。特别地,在相同模型下,诱导相同知识结构的极小技能映射同构。
2 技能映射与技能背景
Rusch 等视被测试者为对象,视问题为属性,研究了知识空间理论和形式概念分析之间的联系,提出了由知识背景构造知识空间的方法。Spoto 等将技能映射的概念运用到心理评估背景上,将内元素视为诊断标准而不是用于解决某一特定问题所需的技能。基于技能映射的合取模型,Spoto 研究了知识空间理论与形式概念分析之间的联系,提出了由形式背景构造知识结构的方法。
问题与技能之间存在着一定的联系。学习者需要掌握一定的技能来解决相应的问题。
三元组(,,)称为一个技能背景,其中为技能(对象)集,为问题(属性)集。∀s∈(=1,2,…,)为一个技能,∀q∈(=1,2,…,)为一个问题。⊆×是与之间的二元关系。若(,)∈,则表示技能与问题的求解无关,若(,)∉,则表示技能与问题的求解相关。
技能背景(,,)是一个特殊的形式背景,可以定义技能概念。
设(,,)为技能背景,在技能集⊆和问题集⊆上分别定义运算:
其中,表示与中所有技能都无关的问题集,表示与中所有问题的求解都无关的技能集。
特别地,记{}=,表示与技能无关的问题集;记{}=,表示与问题的求解无关的技能集。
若二元组(,)满足=且=,则称(,)为技能背景(,,)的一个技能概念(简称概念)。其中是概念的外延,是概念的内涵。
一个技能与哪些问题的求解相关,或者一个问题的求解与哪些技能相关,是由问题与技能之间的关系决定的。对于技能映射(,,),()⊆表示与问题的求解相关的技能集。于是,由关系(,)∈⇔∉()可以确定与技能映射(,,)相对应的技能背景(,,)。相反地,由技能背景可以唯一地确定与之相对应的技能映射。技能背景中,用1 表示(,)∈,用0 表示(,)∉。
给定技能映射(,,),其中={,,,,},={,,,},()={,},()={,,},()={},()={,},()={}。
由(,)∈⇔∉()可以得到相对应的技能背景(,,),如表1所示,其概念格(,,)如图1所示。
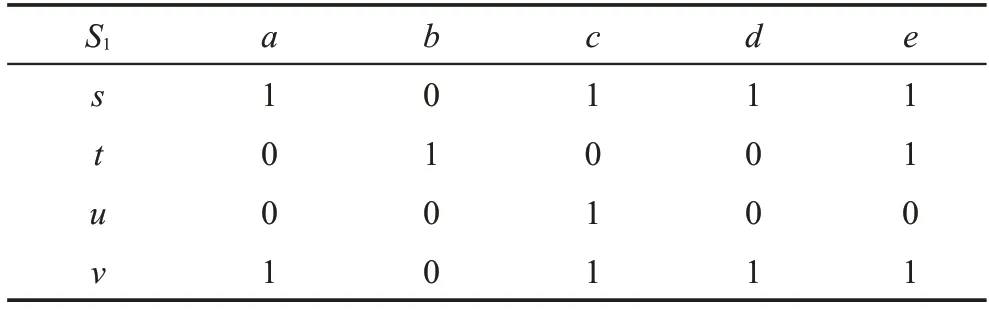
表1 技能背景(S1,Q1,I1)Table 1 Skill context(S1,Q1,I1)
由图1 可以看到,概念格(,,)的内涵有∅,{},{},{,},{,,,},,外延有,{,,},{,,},{,},{},∅。概念({,},{,,,})表示与技能,都无关的问题为,,,;且与问题,,,的求解都无关的技能恰好是,。
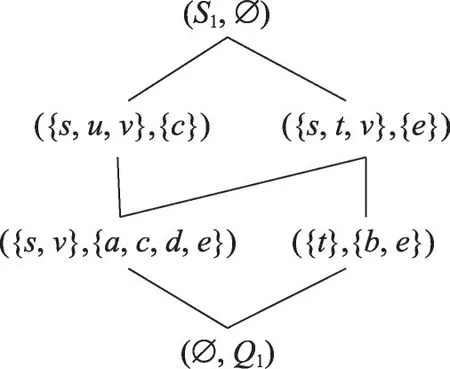
图1 概念格L(S1,Q1,I1)Fig.1 Concept lattice L(S1,Q1,I1)
反过来,若给定技能背景(,,),可根据关系(,)∈⇔∉()得到相对应的技能映射(,,)。
3 技能背景与知识结构
通过关系(,)∈⇔∉()可将技能映射转换成技能背景。通过求解技能背景的概念格可以快速确定相应技能映射诱导的知识结构。不同的技能子集可能诱导相同的知识状态,即存在冗余的技能。下文将在保持知识基不变的前提下,讨论技能约简的问题。另一方面,Falmagne 等指出,一个知识结构至少被一个技能映射所诱导,即对给定的知识结构,可以确定诱导它的技能映射。技能映射与技能背景之间可以相互转换,从而对于给定的知识结构,可以确定相应的技能背景。
3.1 由技能背景构建知识结构
概念(,)中,内涵中问题的求解与中所有的技能都无关。外延中的技能与中所有问题的求解都无关。由于形式背景中所有概念内涵构成的集族是交封闭的,则所有概念内涵的补集构成的集族是并封闭的。于是可得如下结论。
设(,,)为技能背景,(,,)为其概念格。对∀(,)∈(,,),技能子集在合取模型下确定的知识状态为内涵,外延在析取模型下确定的知识状态为。
概念(,)中,外延表示与中所有问题的求解都无关的技能集,对∀∈,∀∈,有(,)∈,即∉()。于是对∀∈(),∈,即对∀∈,有()⊆,故为在合取模型下确定的知识状态。
另一方面,内涵表示与中所有技能都无关的问题集。则表示与中某些技能相关的问题集,即对∀∈,存在∈,使得∈()。于是对∀∈,()⋂≠∅,故即为在析取模型下确定的知识状态。
设(,,)为技能背景,(,,)为其概念格。L 是其所有概念内涵构成的集族,K 是其所有概念内涵的补集构成的集族,即K={|∈L}。则L为闭包空间,K 为知识空间,且L与K 互为对偶结构。
通过关系(,)∈⇔∉()可得到与技能背景相对应的技能映射(,,)。由于形式背景中所有概念内涵满足交封闭,从而所有概念内涵的补集满足并封闭。容易得到,L即为相应技能映射在合取模型下诱导的闭包空间。K 即为相应技能映射在析取模型下诱导的知识空间。
本文分别称L、K 是由技能背景(,,)通过合取模型、析取模型确定的闭包空间和知识空间。
对技能背景(,,),由图1 和定理2 得技能背景(,,)所有概念内涵构成的集族为L={∅,{},{},{,},{,,,},},所有概念内涵补集构成的集族为K={∅,{},{,,},{,,,},{,,,},}。于是技能背景(,,)通过合取模型确定的闭包空间为L,通过析取模型确定的知识空间为K。
知识状态是学习者在理想状态下能够解决的问题子集。特别地,在析取模型下,若学习者仅仅掌握了技能,则该学习者的知识状态即为与技能相关的问题集合。于是可得如下结论。
设(,,)为技能背景。在析取模型下技能子集{}确定的知识状态为=。
设(,,)是与(,,)相对应的技能映射,则在析取模型下,技能子集{}诱导的知识状态为:

即技能子集{}诱导的知识状态为=。
例1 中,根据推论1 可知技能子集{}通过析取模型诱导的知识状态为{}。可以发现技能子集{}通过析取模型诱导的知识状态也是{},即在构建知识结构的过程中存在冗余的技能。下文将讨论技能的约简问题。
3.2 知识基与技能约简
技能背景通过合取模型与析取模型确定的知识结构对偶。下文将基于析取模型讨论技能的约简问题。技能约简是保持知识结构不变的前提下,删除冗余技能的过程。在析取模型下,技能背景确定的知识结构为知识空间。有限的知识空间必有一个基,知识空间可由基唯一确定。于是可以讨论保持知识空间基不变的前提下,技能的约简问题。保持知识空间基不变,从而保持知识结构不变。
本文将技能背景通过析取模型确定的知识空间的基称为技能背景的知识基。保持知识基不变的技能约简,不必求出技能映射诱导的知识结构,从而降低了时间复杂度。
知识空间K 的基是由K 的所有原子构成的集族。问题的原子是指包含问题的极小知识状态,给出如下定义。
设(,,)为技能背景。↙表示是不包含问题的极大集。
由定义11 可知若↙,则是包含问题的极小集,且由推论1 可知是一个知识状态,于是是问题的原子。用()表示问题的所有原子,则可以通过运算“ ↙”由技能背景中找出所有问题的原子,从而得到知识空间的基。于是可得如下结论。

推论2 中知识空间K 的基B 即为技能背景(,,)的知识基。
给定技能映射(,,),其中={1,2,3,4,5},={,,,,,},(1)={,,,},(2)={,,},(3)={,},(4)={,,,},(5)={,} 。其对应的技能背景为(,,),则有:

于是由定义11可以得到技能背景(,,)如表2所示,其中用“×”表示(,)∈。
由表2 和推论2 可得(1)={}={{1}},同理有(2)={{2,3},{1,2,4}},(3)={{2,3}},(4)={{1,2,4},{4,5}},(5)={{4,5}}。于是技能背景(,,) 的知识基为B={{1},{2,3},{4,5},{1,2,4}}。
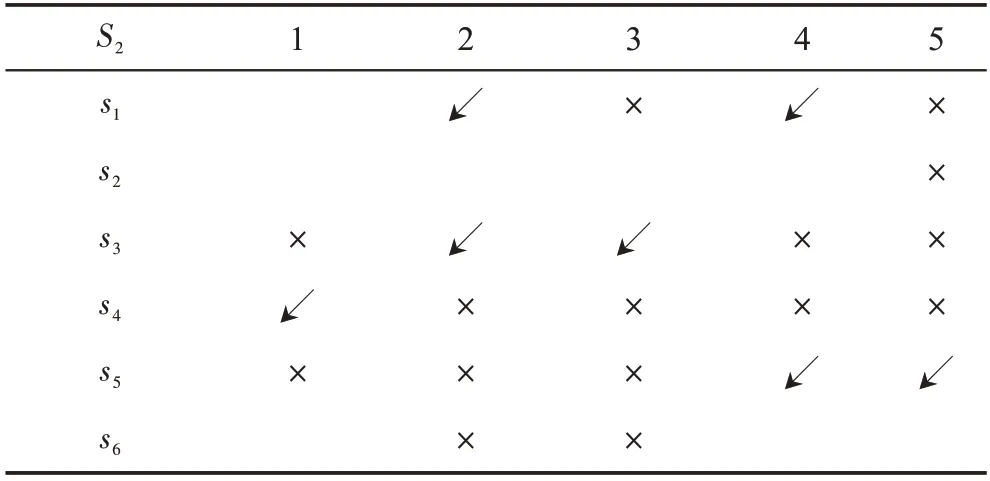
表2 技能背景(S2,Q2,I2)Table 2 Skill context(S2,Q2,I2)
由推论2 可以知道,技能背景(,,)的知识基只需由满足↙(∈,∈)的技能来描述。于是可以对技能背景进行约简,约去不存在“ ↙”的行。此外,若技能背景中存在具有“ ↙”且完全相同的两行,设对应的技能分别为,,则=,说明由这两个技能诱导的知识状态相同,可选择性地约去其中一个技能。
若对∀∈,技能都不满足↙,则称技能为不必要技能。若对技能,∈,存在∈,使得↙,↙且=,则称技能,为相对必要技能。若对技能∈,存在∈,使得↙,且对∀∈-{},都有≠,则称技能为核心技能。
对技能背景进行技能约简,最后得到每行都具有“ ↙”且每行都各不相同的技能背景。约简后与约简前的技能背景具有相同的知识基,从而通过析取模型确定的知识空间相同。此时,所有的行对应的技能构成的集合即为极小技能集。
设(,,I)是由(,,)通过技能约简得到的每行都具有“ ↙”,且每行都各不相同的技能背景,则为极小技能集,(,,)为极小技能映射。其中是从到2{∅}的映射。
由于存在相对必要技能,于是极小技能集和极小技能映射不一定唯一。
对技能背景(,,)进行技能约简,约去不具有“ ↙”的行,得到每行都各不相同的技能背景(,,I),如表3 所示。
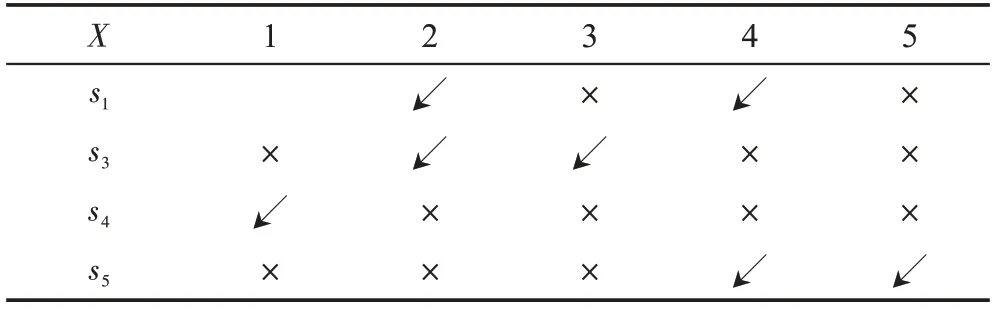
表3 技能背景(X,Q2,IX)Table 3 Skill context(X,Q2,IX)
可以发现=,于是,为相对必要技能,此处将技能约去。由定义11 显然可以知道是不包含问题的极大集,于是有↙。同理有↙,↙,↙,↙,↙,↙。因此可以得到约简后的技能背景(,,I),如表4 所示。
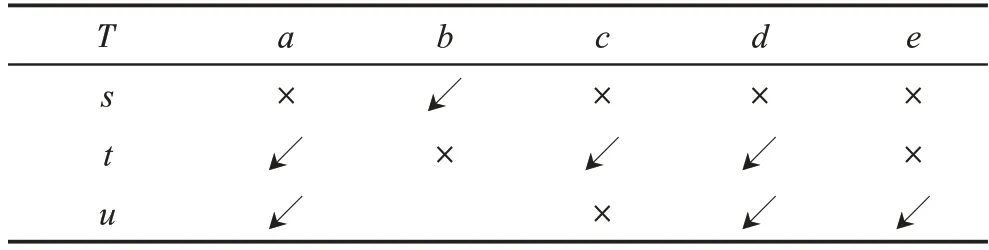
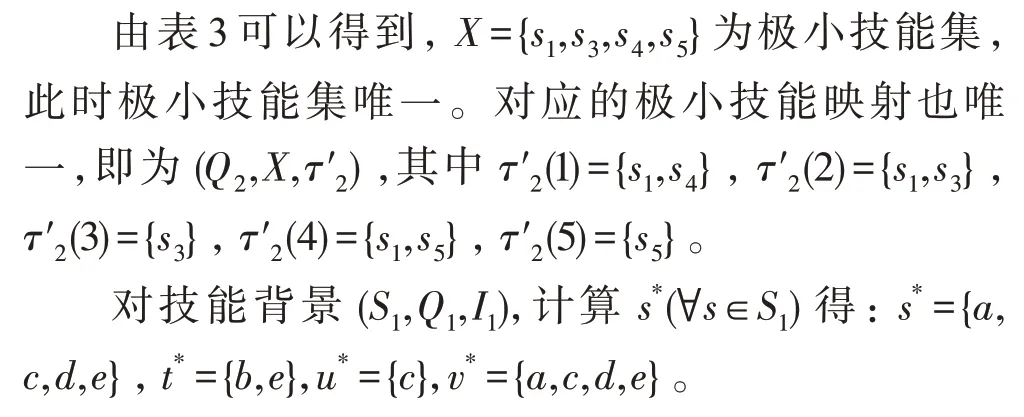
表4 技能背景(T,Q1,IT)Table 4 Skill context(T,Q1,IT)
由表4 可以得到,={,,}为极小技能集,此时极小技能集不唯一,对应的极小技能映射也不唯一。
有限的知识空间中,每个问题至少有一个原子,于是在技能背景(,,)中,对∀∈,存在∈,使↙成立,于是可得如下结论。
设⊆为极小技能集,则技能背景(,,I)和(,,)的知识基相同,且都为B={|∀∈}。
(,,)与(,,I)通过析取模型确定的知识空间相同,设为K 。显然(,,I)和(,,)的知识基相同。对∀∈,存在∈,使↙成立,即是的原子。而对∀∈,存在∈,使↙成立,于是K 的原子都可以表示为(∈) 的形式。故技能背景(,,I)的知识基为B={|∀∈}。
由例4 可知,技能背景(,,)的极小技能集为={,,,}。由推论4 可知,技能背景(,,)的知识基为B={{1},{2,3},{4,5},{1,2,4}}。这与例3 中未进行技能约简时所求结果一致。
3.3 由知识结构构建技能背景
对于给定的知识结构,若其满足并封闭,则为知识空间。有限的知识空间必存在基,而存在基的知识空间必由某极小技能映射所诱导,且极小技能集的基数等于基中元素的个数。于是有限的知识空间必由某极小技能映射所诱导。
对于确定的知识空间,可以通过寻找知识空间的基,进而寻找诱导该知识空间的极小技能映射。
定理3设知识空间K 的基为B,给定集合,使得:→B 为一个双射,则技能映射()={∈|∈()}通过析取模型诱导的空间为K。
设知识空间K 的基为B={{},{,},{,}},且={,,},则必存在诱导知识空间K 的极小技能映射。令={1,2,3},定义双射:→B 使得(1)={},(2)={,},(3)={,}。则()={1,2},()={2,3},()={3}。于是技能映射(,,)通过析取模型诱导的知识空间为K,且(,,)是诱导K 的极小技能映射。
对于给定的知识空间,可以确定诱导它的极小技能映射。技能映射(,,)与技能背景(,,)之间可以互相转换。于是对给定的知识空间K,可以构建通过析取模型确定K 的技能背景。从而有如下结论。
设知识空间K 的基为B,为问题集,令B′={|∈B}。给定集合,使得:→B′是一个双射,⊆×是与之间的二元关系,且(,)∈⇔∈(),则技能背景(,,)所有概念内涵的补集构成K。
令:→B,则()=()(∀∈)。由定理3可得技能映射()={∈|∈()}在析取模型下诱导的知识空间为K,且∈()⇔∈()。在析取模型下,由技能子集⊆诱导的知识状态={∈|()⋂≠∅},当为单点集时,设={},则:

遍历的所有单点集得到基B,即技能背景(,,)的知识基为B 。于是(,,)的所有概念内涵的补集构成的集族即为K。
给定知识空间K={∅,{1,3},{2,4},{3,4},{1,3,4},{2,3,4},},K 的基为B={{1,3},{2,4},{3,4}}。则根据B′={|∈B}得到B′={{2,4},{1,3},{1,2}}。令={,,},定义双射:→B′使得()={2,4},()={1,3},()={1,2}。于是根据(,)∈⇔∈()可以得到通过析取模型确定知识空间K 的技能背景(,,),如表5 所示。
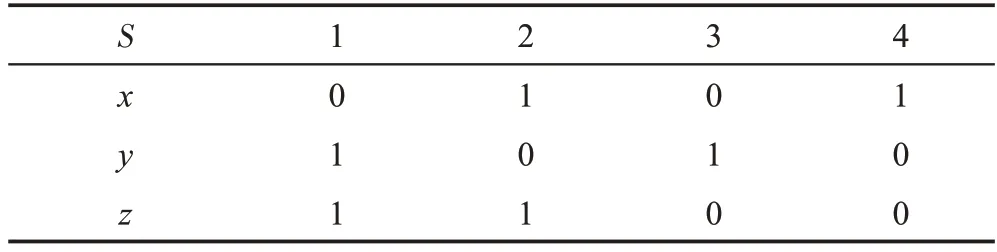
表5 技能背景(S,Q,I)Table 5 Skill context(S,Q,I)
若给定的知识结构L满足交封闭,则其对偶结构K 满足并封闭,即K 为知识空间。于是可以根据定理4 构建通过析取模型确定K 的技能背景。从而得到通过合取模型确定L的技能背景。对给定的闭包空间L,通过合取模型确定L的技能背景的构建过程如下:
(1)计算出闭包空间L的对偶结构K;
(2)求出知识空间K 的基B ;
(3)根据B′={|∈B}计算出B′;
(4)定义技能集,使得:→B′是一个双射;
(5)根据(,)∈⇔∈()得到技能背景(,,)。
对于闭包空间L={∅,{1},{2},{1,2},{1,3},{2,4},},要构建通过合取模型确定L的技能背景。先计算出其对偶结构K={∅,{1,3},{2,4},{3,4},{1,3,4},{2,3,4},},再计算K 的基B。从而根据定理4 构建出技能背景(,,)如表5 所示。
4 技能评估与学习路径选择
李金海等在文献[22]中对概念的渐进式认知理论与方法进行了研究,认为概念的渐进式认知能够实现阶段性认知,并根据阶段性认知来及时指导下一步的行动,从而逐渐实现完全认知。不同的技能可能与相同问题的求解相关,即掌握了不同技能的学习者可能具有相同的知识状态。在已知学习者知识状态的情形下,对学习者进行技能评估,并选择学习可以促使知识状态发生改变的技能显得尤为重要。与概念的渐进式认知理论不同的是下文将在已知学习者知识状态的情形下,通过技能评估得到学习者对技能的掌握情况,并据此指导下一步的技能学习。
由知识结构K 的定义可知,K 必包含∅和。知识状态为∅的学习者需要学习相应的技能才能达到状态。属性拓扑表示法是形式背景的一种新型的可视化表示法。与属性拓扑表示不同的是下文将以知识状态为结点,在析取模型与合取模型下,对学习者的学习过程进行可视化表示,以便选择最佳的学习路径。寻找适合自己的学习路径,可以降低学习中的时间成本和精神成本,提高学习效率,优化学习效果。
4.1 析取模型下的技能评估与学习路径选择
设(,,)为技能背景,,∈,若⊆,即⊆,则与技能相关的问题也与技能相关,记作≺。
当诱导知识状态的技能子集都同时包含有技能,,且,都是核心技能并满足≺时,处于该知识状态的学习者必定掌握了技能,且无法判断其是否掌握了技能。
例如在技能背景(,,) 中,核心技能集为={,,,}。由定义12 得≺,显然技能子集{,,}和{,}在析取模型下确定的知识状态都是{1,2,4,5}。若学习者的知识状态为{1,2,4,5},则其必定掌握的技能为,,而无法判断其是否掌握了技能。
对给定的技能背景(,,),设其概念格为(,,),核心技能集为,所有概念内涵的补集构成的知识空间为K。对任意概念(,)∈(,,),技能集在析取模型下确定的知识状态为∈K。于是有如下结论。
设(,,)为技能背景,为其核心技能集,(,) 为其任一概念。若学习者的知识状态为=,则该学习者需掌握的核心技能有(⋂){|,∈(⋂),≺}。
析取模型下,不必要技能所诱导的知识状态可由其他技能诱导的状态的并来表示,且相对必要技能之间可以相互代替,于是只需判断学习者需掌握的核心技能。对诱导状态的技能集,若存在,∈⋂,使得≺。即与技能相关的问题也与技能相关,故技能,中,学习者需掌握技能,而技能可掌握也可不掌握。故该学习者需掌握的核心技能有(⋂){|,∈(⋂),≺}。
对于给定的技能背景(,,),可以通过计算得到其概念格(,,)。根据概念格上的偏序关系,可以找到由概念(∅,)到概念(,∅)的路径,从而学习者可以选择适合自己的学习路径。若中存在相对必要技能,则学习者可以根据自身情况,选择学习适合自己的相对必要技能。下面分两种情况进行讨论。
第一种情况是不存在相对必要技能时,对于学习路径∅→→→…→。设处于知识状态K的学习者需掌握的核心技能有T,处于知识状态K的学习者需掌握的核心技能有T。则处于状态K的学习者需要学习T中异于T中的技能来达到状态K。
第二种情况是存在相对必要技能时,对于学习路径∅→→→…→。设处于知识状态K的学习者需掌握的核心技能有T,处于知识状态K的学习者需掌握的核心技能有T。若T=T,则处于状态K的学习者可根据自身情况选择相对必要技能进行学习达到状态K。若T≠T,则处于状态K的学习者需学习T中异于T中的技能来达到状态K。
设(,K)为知识结构,K 有条学习路径。其中,由∅到经过的知识状态的个数最少的学习路径称为关键学习路径。
由∅到的关键学习路径可能不唯一,学习者可以根据自身对技能的掌握情况,选择最适合自己的学习路径,以提高学习效率。
表1 的技能背景(,,) 中,={,,,},={,},={},={,,,}。其核心技能集为={,}。概念格(,,)如图1 所示。所有概念内涵的补集构成的集族为K={∅,{},{,,},{,,,},{,,,},}。
对于概念({,,},{})∈(,,),技能子集{,,}在析取模型下确定的知识状态为{}={,,,}。若学习者的知识状态为{,,,},则其需掌握的核心技能为{,,}⋂={},同理可得处于K中状态的学习者的技能掌握情况如表6 所示。
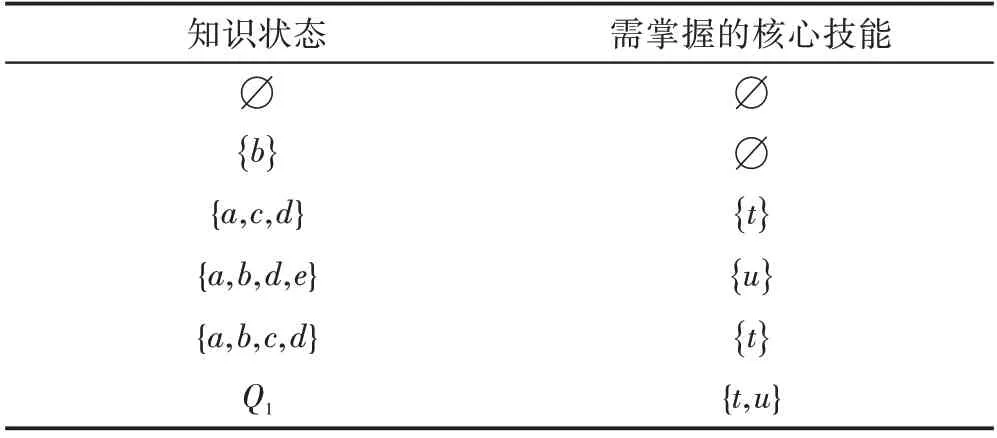
表6 K1 中知识状态的技能掌握情况Table 6 Skill mastery of knowledge state in K1
由图1 可以发现有3 条由概念(∅,) 到概念(,∅)的路径,则在析取模型下,知识状态由∅到的学习路径有3 条。结合表6 可将学习路径以图2 所示形式表示出来。
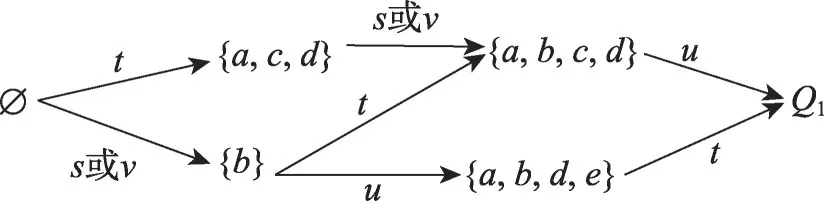
图2 K1 的学习路径Fig.2 Learning path in K1
根据图2,学习者可以根据目前所处的知识状态来选择下一步将要学习的技能,从而提高学习效率。
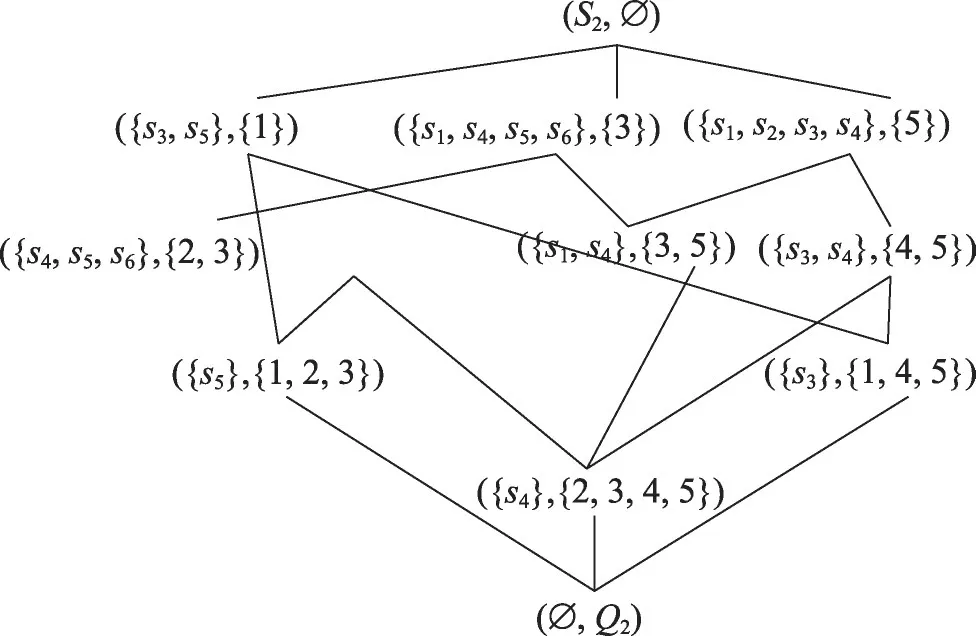
图3 概念格L(S2,Q2,I2)Fig.3 Concept lattice L(S2,Q2,I2)
由图3 可知技能背景(,,)所有概念内涵补集构成的集族为K={∅,,{1},{2,3},{4,5},{1,2,3},{1,2,4},{1,4,5},{1,2,3,4},{1,2,4,5},{2,3,4,5}}。由定理5 可以得到处于K中状态的学习者的技能掌握情况如表7所示。
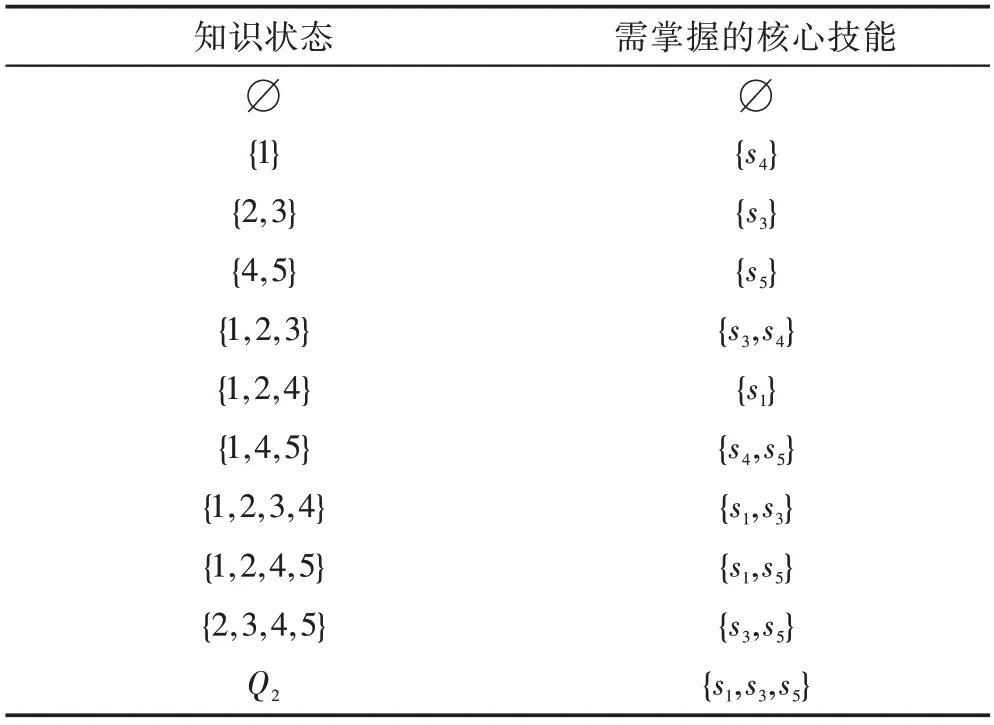
表7 K2 中知识状态的技能掌握情况Table 7 Skill mastery of knowledge state in K2
由图3 可以发现有8 条由概念(∅,) 到概念(,∅)的路径,则在析取模型下,知识状态由∅到的学习路径有8 条。结合表7 可将学习路径以图4所示形式表示出来。
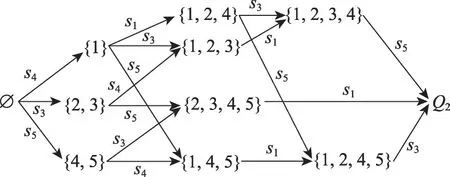
图4 K2 的学习路径Fig.4 Learning path in K2
4.2 合取模型下的技能评估与学习路径选择
对于给定的技能背景(,,),设其概念格为(,,)。所有概念内涵构成的闭包空间为L。对任意概念(,)∈(,,),技能集在合取模型下诱导的知识状态为∈L。于是有如下结论。
设(,,)为技能背景,(,)为其任一概念。若学习者的知识状态为∈L,则该学习者必定掌握的技能为。
学习者的知识状态为=,说明该学习者掌握了与中问题的求解相关的所有技能。因为表示与中所有问题的求解都无关的技能集,于是学习者必定掌握的技能即为。又因为=,所以该学习者必定掌握的技能为。
对于给定的技能背景(,,),可以通过计算得到其概念格(,,),根据概念格的偏序关系,可以找到由概念(,∅)到概念(∅,)的路径,从而学习者可以根据自身情况选择适合自己的学习路径。
对于学习路径∅→→→…→,设处于知识状态K的学习者必定掌握的技能为T,处于知识状态K的学习者必定掌握的技能为T。则处于状态K的学习者需要学习T中异于T中的技能来达到状态K。
技能背景(,,)中,其所有概念内涵构成的闭包空间为L={∅,{},{},{,},{,,,},}。对于概念({,,},{})∈(,,),技能子集{,,}={}在合取模型下诱导的知识状态为{}。若学习者的知识状态为{},则其必定掌握的技能为{},同理可得处于L中状态的学习者的技能掌握情况如表8 所示。
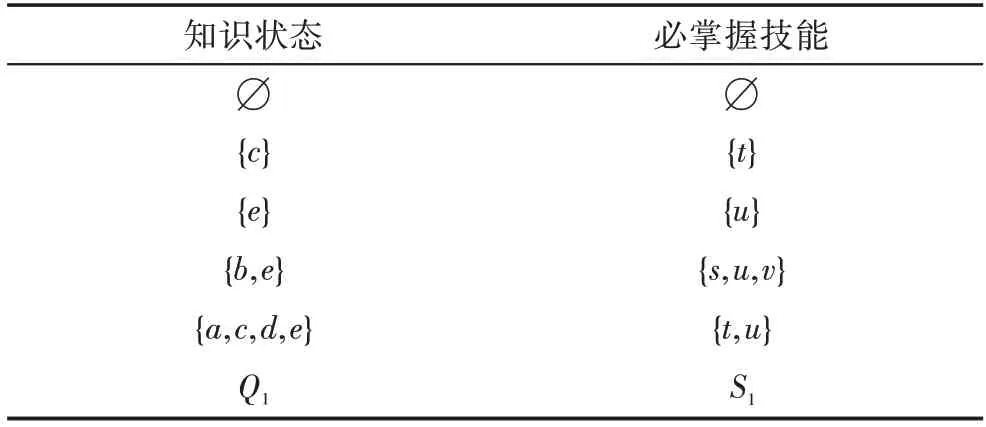
表8 L1 中知识状态的技能掌握情况Table 8 Skill mastery of knowledge state in L1
由图1 可以发现有3 条由概念(,∅)到概念(∅,)的路径,则在合取模型下,知识状态由∅到的学习路径有3 条。结合表8 可将学习路径以图5 所示形式表示出来。
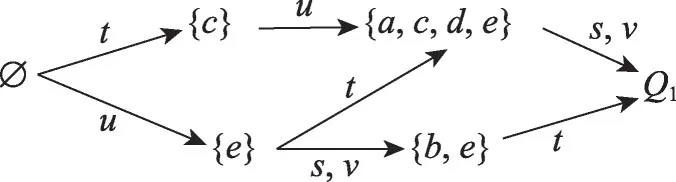
图5 L1 的学习路径Fig.5 Learning path in L1
根据图5,学习者可以根据目前所处的知识状态来选择下一步将要学习的技能,从而提高学习效率。
5 结束语
基于技能与问题间的关系,本文将技能映射与形式概念分析相结合,提出了技能背景的概念。首先对知识结构与技能背景间的联系进行了研究,讨论了知识结构与技能背景的互相转换问题。运用求解概念格的方法可以快速得到由相应技能映射诱导的知识结构。其次讨论了知识基的寻找方法以及保持知识基不变的技能约简问题。最后讨论了技能评估与学习路径的选择问题,学习者可以通过技能评估选择适合自己的学习路径,从而提高学习效率。
通过研究发现,当问题集与技能集较大时,需要借助算法来计算概念格,从而得到学习路径,并对学习路径进行可视化,以便对学习路径的选择。在今后的研究中将进一步考虑大样本情况下,学习路径的选择与可视化问题。此外,本文主要对技能映射的析取模型与合取模型进行研究,且未对概念认知学习过程进行详细的介绍。在今后的研究中,将进一步考虑技能多映射的能力模型与形式概念分析间的联系,并与概念认知学习过程进行结合,进一步考虑技能评估与技能选择过程,且对学习代价以及学习成本等问题进行研究。
