基于改进型蚁群算法和图像识别的变电站机器人路径规划和设备缺陷识别研究
2022-03-12沈映泉黄绪勇肖登宇
唐 标,沈映泉,黄绪勇,肖登宇,张 粥
(1.云南电网有限责任公司电力科学研究院,昆明 650217;2.云南电网有限责任公司红河供电局,蒙自 661100;3.云南电网有限责任公司曲靖供电局,曲靖 655000)
0 引言
变电站智能化巡检对提升电网智能化水平、保证电网安全运行具有重要意义,变电站巡检是保证电网安全运行的传统且重要的工作,其中特高压变电站的巡检尤为重要。这是因为特高压变电站具有空间大、结构复杂、配有多种设备的特点,因此经常使用巡检机器人辅助巡检工作[1~4]。巡检机器人可通过普通照片、紫外、红外影像对变电站设备外绝缘状态进行巡检[5~8]。
机器人巡检过程中最重要的即是机器人的安全运行,智能巡检机器人的安全运行需要服从一下几个条件:1)巡检路径应遍历所有设备,同时避开相临电气设备之间离地1.5m的电场强度峰值位置;2)具有红外、紫外成像功能;3)可自动建立图像数据库、对设备图像进行基本处理,对采集的放电图像和原始图像进行深度学习[9~11];4)通过对图像库的自动匹配和比对,实时监测变电站设备的外绝缘状态。上述智能功能基于巡检机器人本体和测量设备等硬件,需要后台软件的同步操作[12~15]。其中后台软件的主要功能是实现巡检机器人的最短路径计算,以及机器人运行过程中设备运行状态的识别,这两个功能也是巡检机器人的核心功能[9~11]。目前针对巡检机器人路径规划、图像识别,研究人员提出了各种计算和识别方法[5~8],但是现有方法一方面普遍采用二维电场计算的方法,缺乏离地高度的电场分布信息,为机器人的安全运行带来了潜在威胁;另一方面变电站设备众多,路径规划较为复杂,现有算法的计算效率和收敛性有限,需要较多的迭代步数才能得到巡检路径,增加了运维工作的时间成本。
为此本文提出了一种改进型免疫蚁群算法,结合模糊神经网络建立了变电站最优路径选择模型,结合特高压变电站实际尺寸建立变电站的三维有限元模型进行了仿真。将免疫蚁群算法和模糊神经网络应用于变电站巡检机器人的路径规划和视觉图像处理,有效实现了巡检机器人的路径规划和设备故障识别。研究结果对变电站高压电力设备的智能巡检具有一定的理论和工程指导价值。
1 最优巡检路径和模糊神经网络模型
采用免疫蚁群算法计算巡检机器人的最优遍历路径,其目的是提高迭代计算效率。与传统蚁群算法相比(后文称为传统算法),免疫蚁群算法通过引入蚂蚁的免疫抗体基因参数,来降低蚁群重复遍历同一条路径的概率,即蚂蚁走过某条路径后,其他蚂蚁重复选择该路径的概率降低,从而减少迭代计算步数、提高计算效率。
采用模糊神经网络进行设备外绝缘运行状态识别,目的是提高不同拍摄角度下设备的识别能力。传统神经网络中通过调整图像特征阈值,实现不同设备的区分、归类和识别,此时同一设备在不同角度进行拍摄时可能被归类为不同设备,引起识别错误。为此本文利用模糊神经网络,将确定性的阈值转变为概率密度函数,提高图像识别的适应性。
1.1 最优巡检路径模型
最有巡检路径的确定,有以下几个原则:1)路径场强较低,巡检机器人场强较低,保证机器人安全运行;2)遍历所有设备;3)巡检路径最短。本文从传统蚁群算法出发,通过引入蚂蚁的免疫抗体基因参数,来降低蚁群重复遍历同一条路径的概率,提出了改进型免疫蚁群算法,利用该算法计算变电站的巡检路径。其基本原理是充分利用典型特高压变电站的剖分网络,通过设置蚂蚁搜寻变电站内各种电力设备之间电场强度最低的安全路径,同时还要保证巡检机器人能够遍历变电站内的设备。算法按照如下几个步骤确定最优巡检路径的搜寻:
1)输入变电站初始路径信息、变电站平面图,得到初始路径矩阵。
2)根据变电站平面图选择路径的起始点和终点。
3)输入设备信息。
4)基于场强计算得到下一个起点所有可选的位置,通过轮盘赌概率方法计算下一个起点。
该过程通过如下控制方程进行计算:

其中τij(t)是变电站析取图中的一段路劲弧(I,J)上的蚁群信息素浓度;ηij是与路劲弧(I,J)对应的启发式信息;α、β分别为τij(t)、ηij的权重参数。计算时通过式(1)更新路径和路径长度,并迭代计算式(2)和式(3),直到蚂蚁到达目的地或无路径可走为止。共迭代计算M代蚂蚁,每计算一代更新一次信息素矩阵,如果蚂蚁未到达目的地则不更新其信息素矩阵。

迭代计算式(1)~式(3),直到完成第n代蚂蚁的迭代计算为止,蚁群系统全局信息素更新规则如式(4)所示。

在更新过程中,蚁群系统局部信息素更新规则模式按如下方式定义:路径构建过程中,蚂蚁每次经过边缘(I,J),都会立即调用该规则,使用式(6)更新该边缘上的信息素。

其中ξ,τ0为信息素的初始值。经过局部信息素更新后,蚂蚁每经过一条路劲(I,J),边缘τij(t)的信息素就会降低,从而降低其他蚂蚁选择这条路径的概率。假设一定规模蚁群的免疫系统为n,每个抗体基因的长度是m,基因编码大小为s(二进制编码,s=2),输入变量数是l(优化变量的数量),随机产生的新抗体数为p,种群进化规模为40%,截止代数是50。计算时最优路径应当包含有相邻电力设备之间的最短路径,根据此特点设置疫苗,然后根据蚁群免疫适应度等于路径长度倒数的方法计算免疫适应度,最后根据路径长度进行免疫选择,从而保证将较短的路径应用在种群优化中。
1.2 基于模糊神经网络的深度学习模型
自适应模糊神经网络是一种多层前馈网络,其中的第一层是输入变量的隶属度函数,负责定量描述输入信号的模糊程度,按式(7)计算其隶属度函数。

其中节点i具有输入功能,节点i的输入x、y,Ai、Bi为模糊集;Ai和Bi的隶属函数值,表示x和y属于Ai和Bi的程度。
第二层是池化层,层节点的作用是将输入信号相乘,如式(8)所示。

式中每个节点的输出表示规则的可信度。
第三层是归一化层,层节点可计算节点I处归一化可信度。

第四层是模糊规则输出层,该层中的每个节点i都是自适应节点,节点i的输出按如式(10)进行计算。

其中ωi是第三层的输出,fi是节点的参数集,即后续参数。
第五层是总输出层,通过在一个固定节点计算所有输入信号的总输出,如式(11)所示。

自适应模糊神经推理系统的输出可以表示为前一部分参数和后一部分参数的线性组合,如式(12)所示。

本文采用BP算法和最小二乘混合算法进行糊神经网络的学习和训练,从而调整系统前后参数。计算时首先正想计算到第四层,再将计算误差向反方向传递,最后采用BP算法对网络前段参数进行更新。如图1所示是基于模糊神经网络的图像数据库处理流程结构图。
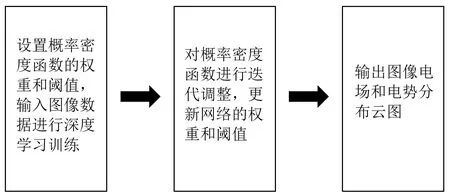
图1 模糊神经网络图像数据库处理
如图1所示,计算时首先设置概率密度函数的权重和阈值,然后输入巡检机器人采集的电气设备图像数据进行深度学习训练,再对概率密度函数进行迭代调整,更新网络的权重和阈值,最后输出图像电场和电势分布云图。
2 联合图像和电场仿真数据的深度学习实验与分析
2.1 变电站电场计算与图像数据库
特高压变电站巡检采用模块化方法,各功能模块配置相应设备,机器人可通过各功能模块之间的路径遍历所有设备。巡检过程中依据规划计算得到的最短路径,获取变电站内各电力设备的红外和紫外图像,构建图像数据库。其中最短路径的规划是对离地1.5m处的电场分布进行分析,避开电强度峰值,得出的相邻设备间场强最低的安全路径。上述优化过程通过第一章介绍的优化算法实现。
本文建立了与实际变电站塔架和电力设备一致的三维有限元仿真模型,其中塔架、每个设备都单独进行建模,再对变电站整体进行数值仿真,通过仿真计算得到地面上方1.5m处的电场强度分布。由于站内设备结构复杂,本文对仿真模型进行了以下简化处理:
1)忽略此套、胶木等绝缘介质对电场分布的影响。
2)变电站母线、进线、出线,设备间相连的导线简化为圆柱形,电压沿线路均匀分布无畸变。其中母线上的电位等于导线对地电压。
3)结合绝缘子、断路器、构架等设备的实际尺寸,将其绝缘结构的细节简化为圆柱体等线性结构的导体。
仿真时带电导体的边界条件设置为体电势,根据设备实际电压进行设置,将地面设置为零电位并且作为无限大平面考虑。计算时不考虑空气湿度和温度对电场分布的影响,为避免电场计算不收敛,取环境空气介质的相对介电常数远小于导体。如图2所示是变电站三维模型的透视效果图和部分金具表面电场分布示意图。图3所示是变电站离地1.5m处电场分布俯视图。

图2 典型金具表面电场分布图
由图3可知,金具表面场强主要集中分布在其外表面上,因此应重点检查均压环的场强集中区域,这些区域中通常可以检测到较为显著的电晕放电现象。

图3 变电站距地面1.5m处电场强度分布
由图3可以看出,变电站距地面1.5m处的电场强度分布不均,在高亮度区域达到峰值。为了保障巡检的安全作业,巡检机器人必须避开高场强区域,选择场强较低的路径。变电站的电力设备的图像数据库如图4所示,由图中可见变变电站图像数据库包含有平波电抗器、套管、避雷器、绝缘子、电容器等电力设备的照片。如图5所示,通过紫外成像仪可直接拍摄电晕的图像,巡检机器人可以对设备的电晕放电情况进行有效识别,建立设备电晕图像数据库,评估电晕放电强度。

图5 变电站电力设备电晕图像数据库
2.2 巡检机器人电场分布计算结果
在计算得到变电站整体电场分布的前提下,最后一步是通过巡检机器人电场分布计算,更新存在有巡检机器人时的电场分布。变电站巡检机器人的计算模型通过采用1:1尺寸参数进行建模,变电站巡检机器人的实物图是仿真模型图如图6所示。
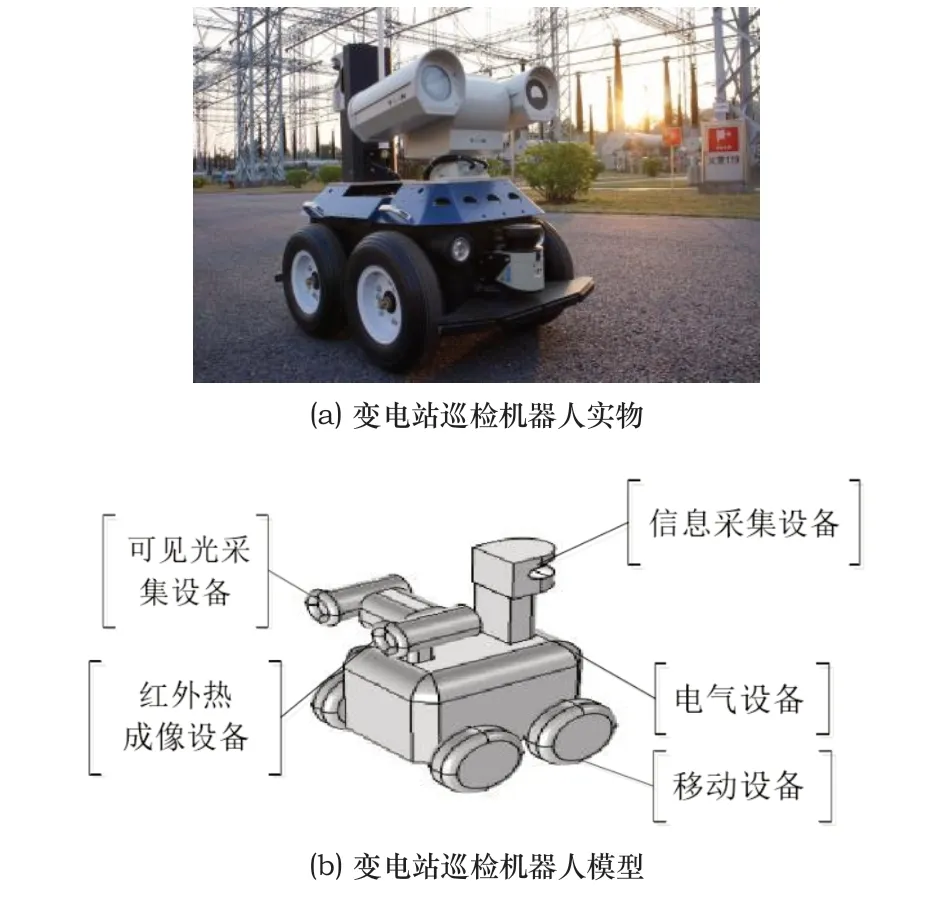
图6 变电站机器人实物和模型图
由图6(b)可见巡检机器人由光采集系统、信息采集系统、红外热成像采集设备、电气、移动设备组成。光采集系统包含一个高清摄像头;信息采集系统由信号传感器构成;红外热成像设备包含热成像仪。建模时为了简化计算,不针对设备和传感器的细节建模,将机器人的组件简化为立方体,尺寸参数如图7所示。
1)光采集系统:半径为6.5cm、长度24cm的圆柱体。
2)信息采集系统:19cm×18cm×16cm的长方体。
3)红外热成像设备:半径为6.5cm、长度12cm的圆柱体。
4)电气设备:56cm×41cm×35cm的长方体。
5)移动设备:四个半径为12cm、长度24cm的圆柱体。
变电站巡检机器人的边界条件设置为接地和不接地两种,得到的电场分布计算结果如图7所示。
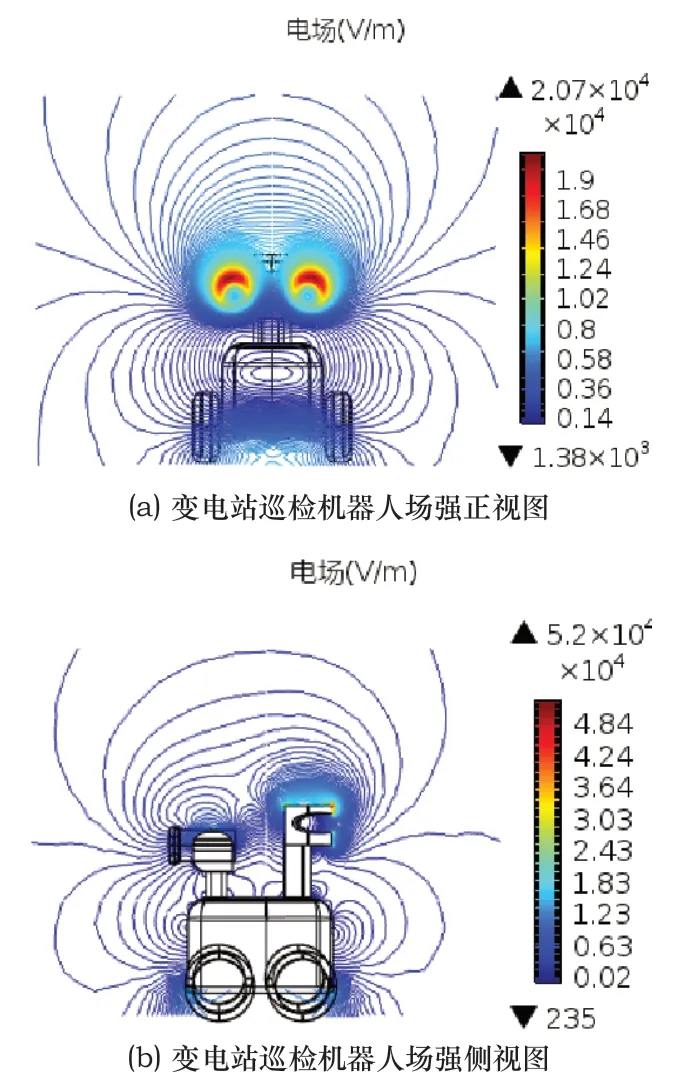
图7 变电站机器人不接地时电场计算结果
由图7可以看出,机器人不接地时巡检机器人各设备周围电场发生不同程度的畸变。地面电场约为4.4kV/m,巡检机器人中电场最大值为52kV/m,电场畸变程度为11.9倍。
由图7可以看出,巡检机器人接地条件下,在巡检机器人电气设备和地面之间的电场分布在0.1~1.5kV/m之间,相较于设备不接地巡检机器人电气设备与地面之间电场明显降低,但巡检机器人本体的电场畸变程度增加,相较于不接地的情况,其最大电场由52kV/m增加至了70.5kV/m,增幅36%。
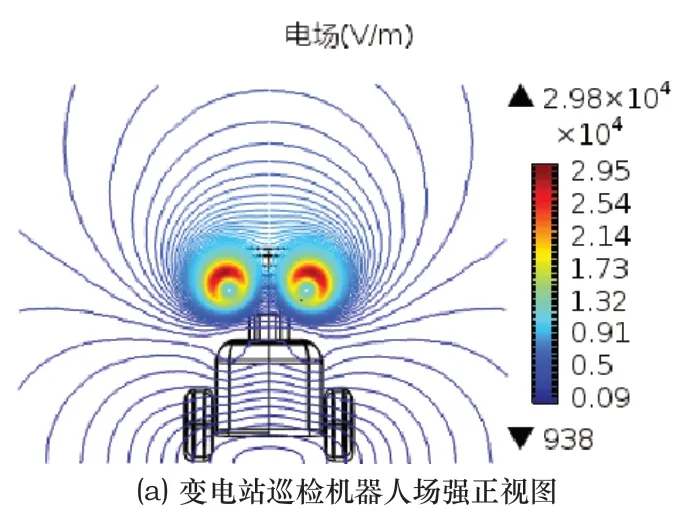
根据如图7和图8的计算结果可知,巡检机器人在接地情况下电场更大,为保证机器人的安全运行,计算时利用机器人接地条件下的最大电场畸变倍数,更新原始无巡检机器人条件下,变电站的电场分布计算结果。

图8 变电站机器人接地时电场计算结果
2.3 免疫蚁群算法路径优化结果与分析
根据典型特高压变电站的功能模块,对变电站内部典型的电力设备区域进行网格化抽象,得到如图9所示的变电站模块化示意图,通过第一章最优路径模型算法得到最佳路径。其中黑色区域表示电力设备占有的区域,白色块区域表示巡检机器人可移动区域。

图9 变电站巡检机器人的最佳路径
如图9所示是变电站最优路径长度收敛曲线图,由图中所示的迭代过程可以看出,免疫遗传算法有效地找到了该机器人在变电站中的最佳行走路径,得到了最小路径长度,巡检机器人检修路径不仅要最短,而且要避开母线区、变压器区、支柱绝缘子区等单独功能区域,此时寻找最佳路径更为复杂。根据如图3所示的变电站地面以上1.5m处的电场强度分布,在图中每个区域随机分配蚂蚁的初始分布位置,结果如图11所示。由图11(a)可见蚁群最初在电场强度峰值附近是随机分布的,经过免疫蚁群算法计算后,蚂蚁最终分布在电场分布的峰值处(如图11(b)所示)。由此即可计算电场峰值间的最优路,结果如图12所示,此时巡检机器人即可按照最优路径进行巡检。
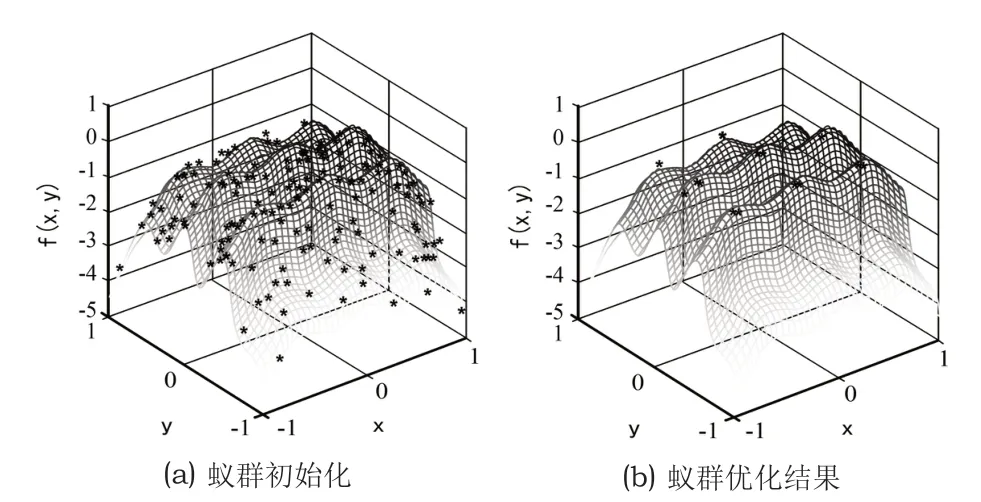
图11 基于免疫蚁群算法的电场峰值优化结果示意图
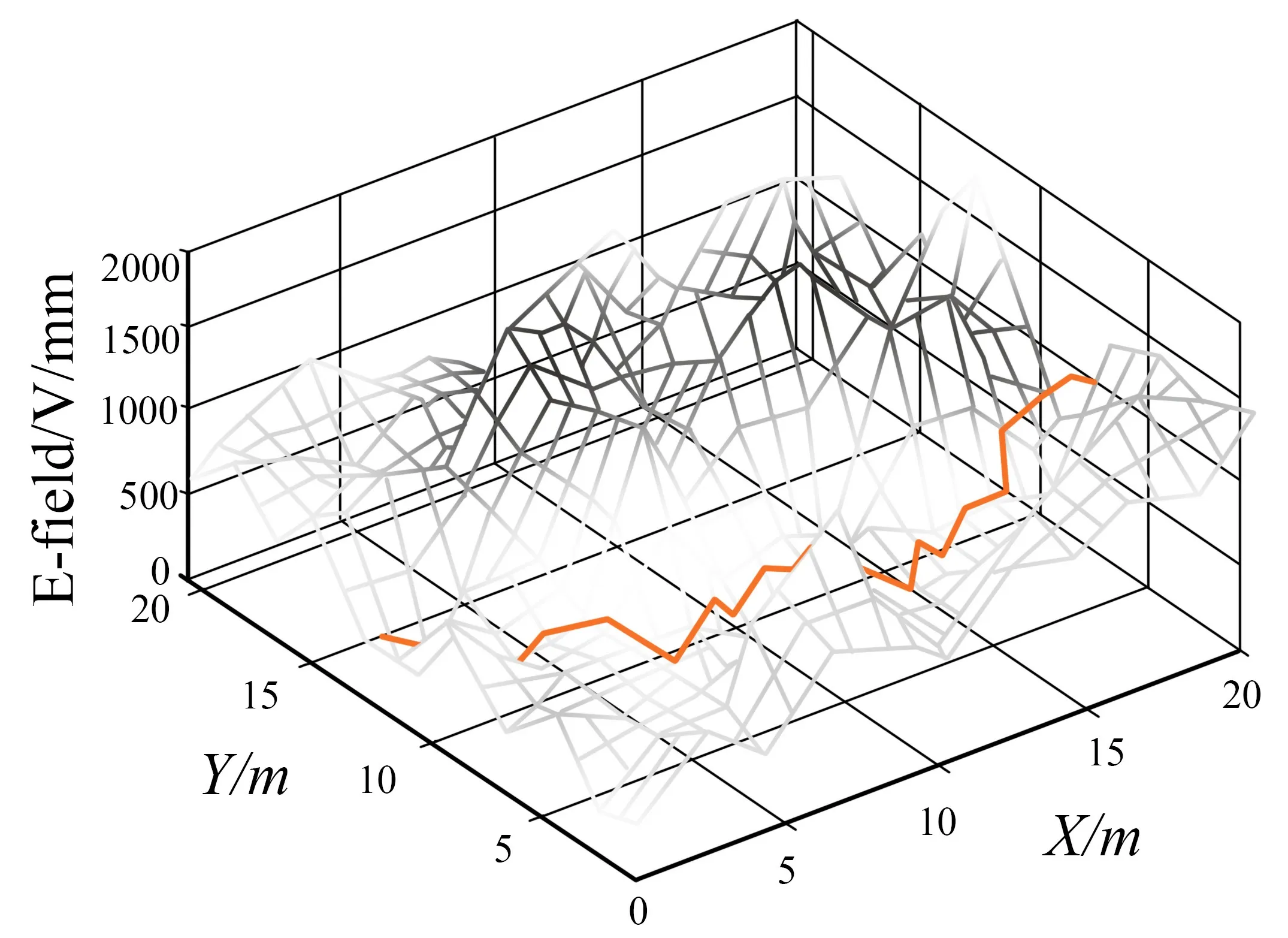
图12 电场峰值间最优路径
如图12是最优路径的三维计算效果,根据图12结果变压器检修人员或巡检机器人可沿最优路径进行巡逻,同时有效避开电场强度的峰值区域。图13为免疫蚁群算法的收敛曲线。

图13 免疫蚁群算法的收敛曲线
由图10的计算表明,本文提出的免疫蚁群算法可以遍历所有电气设备,有效地找到巡视各电气设备的最短路径,结果表明该路径长度为39m。由图13计算结果可以看出,为了避开母线区、变压器区、支柱绝缘子区等单独功能区域,巡检路径长度将大于最短路径,在综合考虑安全性、设备遍历性后,得到的路径距离最长可达850m,通过蚁群算法迭代计算后可得最优路径为460m。同时由图10和图13可以看出,本文的算法具有更加的迭代收敛性(图10中路径结果震荡更小),以及更快的迭代速度(图13中迭代次数更少)。

图10 变电站最优路径长度迭代曲线
2.4 图像深度学习结果与分析
图像深度学习是基于图像数据库中大量紫外、红外设备图像的分割、归类,实现设备状态的智能归类和识别。本文通过遗传算法和模糊神经网络相结合的方法,对绝缘子、均压环等电力设备的图像进行深度学习训练,图像的分割效果如图14所示。

图14 电力设备图像分割效果
由图14可以看出,通过遗传算法和模糊神经网络算可自动对均压环、绝缘子等典型电力设备进行分割以及灰度二值化处理。本文利用模糊神经网络对电力设备图像库进行训练、学习,通过对神经网络的池化层和卷积层权值和阈值的自动迭代计算,使其达到稳定值,完成电力设备图像深度学习。同时通过增加模糊神经网络的中间层数,还可以进一步提高电力设备现场图片识别的准确度。模糊神经网络各神经元之间的权值和阈值的迭代计算过程十分复杂,基于不同方向、不同距离拍摄下的紫外、红外照片,通过计算机迭代计算得到收敛后的稳定权值和阈值,其权值和阈值收敛结果如图14所示。
从图15可以看出,模糊神经网络的学习效果较好,40次迭代后适应度函数趋于稳定。以典型复合支柱式绝缘子伞裙裂纹为例,柱式绝缘子在长时间的机械应力和电应力共同作用下易发生复合材料龟裂。如图16所示是复合绝缘子表面裂纹的定量图像分析结果。


图15 模糊神经网络的学习效果

图16 典型的复合绝缘子表面裂纹
如图16所示为支柱式绝缘子表面的典型裂纹示意图,在巡检机器人巡检过程中,通过模糊神经网络深度学习发现了疑似裂纹区域。对该区域进行放大后,可以得到横向裂纹区域,对该区域进行放大,可见在高机械和电场应力的作用下绝缘子伞裙产生的横向裂纹区域。对区域图像进行灰度二值化处理,分析得到的黑白二值图像,即可实现典型复合绝缘子缺陷问题的识别,证明了图像与电场仿真数据结合的深度学习方法的有效性。
3 结语
特高压变电站巡检机器人的应用正日渐增多,巡检机器人的正常运行一方面要求运行路径最短以提升巡检效率,另一方面要求避开变电站内高场强区域以保证安全运行,为此本文联合免疫蚁群算法、模糊神经网络算法和图像深度学习,建立了巡检机器人最优巡检路径模型,实现了巡检机器人的巡检路径优化和电力设备常见故障识别。得到以下几个主要结论:
1)基于变电站全站模型、巡检机器人模型和免疫蚁群最优路径模型,成功实现了巡检机器人最优路径计算,该路径可以在保证机器人避开高场强区域的同时,具有最短巡检路径。
2)与蚁群寻优算法相比,本文提出的模型在得到相同计算结果的前提下,具有更少的迭代计算次数,表明本文模型具有更高的计算效率。
3)通过对电力设备电场分布仿真,得到了放电频发区域,一次进行巡检机器人重点巡视位置的设置,实例显示本文的方法成功实现了支柱绝缘子裂痕问题的识别,验证了本文模型的有效性。
