三维激光扫描系统在大型吹填项目的应用
2022-03-12张健良赵宝帅
张健良,赵宝帅
(中交广州航道局有限公司,广东 广州 510290)
0 引言
随着国家的快速发展,基建行业的发展突飞猛进,总体呈现出规模庞大、质量要求高、工期要求紧等特点。而测量工作作为基建项目的“眼睛”,也随着基建行业的发展,不断地进行技术革新。近年来,一些高精度、高效率的测量方法如摄影测量、遥感技术和激光测量等逐步在大型项目中推广应用[1]。
三维激光扫描技术是20 世纪90年代中期开始出现的一项高新技术,是继GPS 空间定位系统之后又一项测绘技术新突破。它通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数据。三维激光扫描技术较大程度地改善了传统单点测量仪器数据采集密度不足、作业效率低,难以满足大型基建项目测量需求的问题。
本文阐述了Riegl VZ-400i 定点三维激光扫描系统在香港国际机场第三跑道填海工程(简称香港三跑工程)外业测量工作中的应用,实现了大范围区域、软弱堆填区域、边坡区域的快速测量与成图,较大程度地提升了测量精度、测量效率及测量的安全性,解决了传统单点测量技术难以满足测量需求的问题,为大型项目的测量组织提供了参考方向,具有较好的借鉴意义[2]。
1 项目概况及特点
香港三跑工程位于香港现有机场北侧,在已有的双跑道北侧增加一条新跑道,计划填海造地约650 hm2,回填施工总工程量约9200 万m3,陆上地基处理工艺包括强夯密实、陆上深层水泥搅拌桩、陆上高压旋喷桩和振冲密实等。项目概况见图1。

图1 香港三跑工程位置概况Fig.1 Location overview of Hong Kong three runway project
本项目工期要求高,陆域面积和回填工程量大,成陆速度快,回填工序与地基处理工序之间相互干扰严重。高峰期每日有7~8 组吹填设备同时进行水力吹填施工,10 个以上的陆推工作面同时进行陆域回填施工,回填量高达15 万m3/d。同时,施工过程中涉及多次回填施工与地基处理施工工作界面转换,每次转换都需要进行场地测量,达到设计标高要求后方可进行工作面交接。
鉴于上述要求,高峰期日测量面积约60 万~70 万m3/d,而传统单点测量仪器如全站仪、手持RTK 等难以满足施工的进度和需求。为提升测量效率、测量精度及对复杂地形的适应性,引进奥地利Riegl 公司生产的Riegl VZ-400i 定点三维激光扫描系统进行外业测量相关工作。
2 系统介绍
2.1 扫描原理
无接触式高速激光测量,以点云形式获取扫描物体表面的三维数据。主要采用脉冲测距法[3],即扫描仪发射一个激光脉冲信号,经物体表面反射后,最终被接收,此过程可计算出扫描仪到目标点的距离S=vt/2(v 为激光在空气中的传播速度,t 为发射激光到接收所需时间);系统同步观测二者的水平方向角α 和垂直方向角度θ,由三角函数关系计算出扫描点P 与站点O 的坐标增量,最后加上站点O 的坐标值(由GNSS 接收机提供),即可求出目标点P 的三维坐标值[4]。坐标计算如图2 所示。
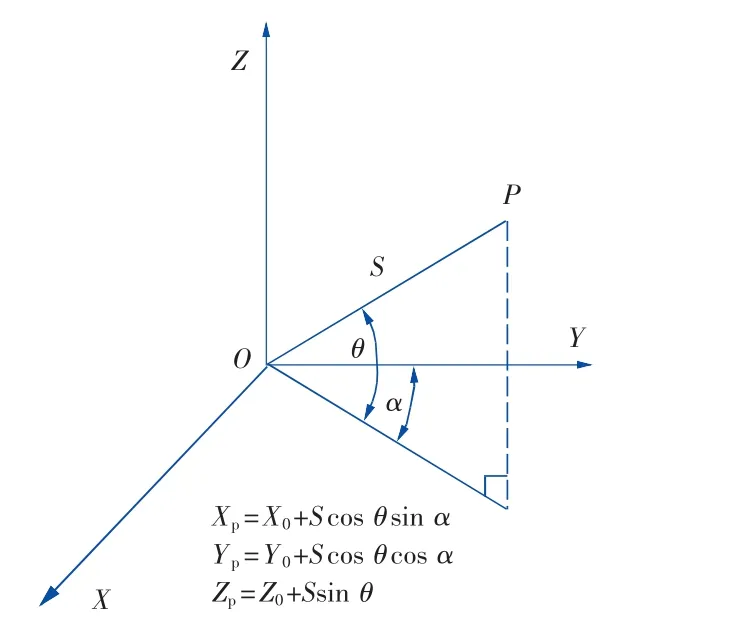
图2 坐标计算Fig.2 Coordinates calculation
2.2 系统组成
Riegl VZ-400i 定点三维激光扫描系统可根据现场需求采用车载或三脚架获取数据,是一款超高性能3D 激光扫描系统,常用工作模式的单站扫描仅需30 s,自动新建站点,工作效率极高。
扫描系统与传统测量中的全站仪相似,不同之处在于扫描系统采集的是一系列高精度的点云数据,实现了由点到面的数据全覆盖,可进行三维建模[5]。系统由GNSS 接收机、照相机、测距和测角单元、IMU(惯导系统)、罗盘和其他构件组成(图3)。其中GNSS 接收机可将当地坐标引入到点云数据成果中,避免相对坐标下的点云模型转换到绝对坐标下模型精度下降的问题;IMU 提供速度、航向和姿态角;罗盘起到定向作用,可自动整平,对数据拼接起到至关重要的作用。

图3 系统组成Fig.3 System composition
2.3 系统特点及技术参数
Riegl VZ-400i 定点三维激光扫描系统具有以下特点[6]:
1) 高精度、高效率、主动性。能快速获取目标物体的三维坐标,扫描角度大(垂直100°/水平360°),最高可测50 万点/s,且数据密度达到0.2 mm/点,大大提高了工作效率;主动发射激光,无需外部光源,可进行夜间作业。
2) 非接触式测量。无需接触被测物体即可快速获取确定目标的三维信息,解决了对危险目标和人员不易到达区域测量等问题,大大保障了人员的安全。
3) 数据信息丰富。除目标物体的三维点云数据外还包括反射信号强度、影像信息等,达到“实景复制”的效果。
4) 机动、灵活。可根据现场地形变化,车载和三脚架切换使用。
设备参数及与传统测量仪器参数的对比见表1[7]和表2。
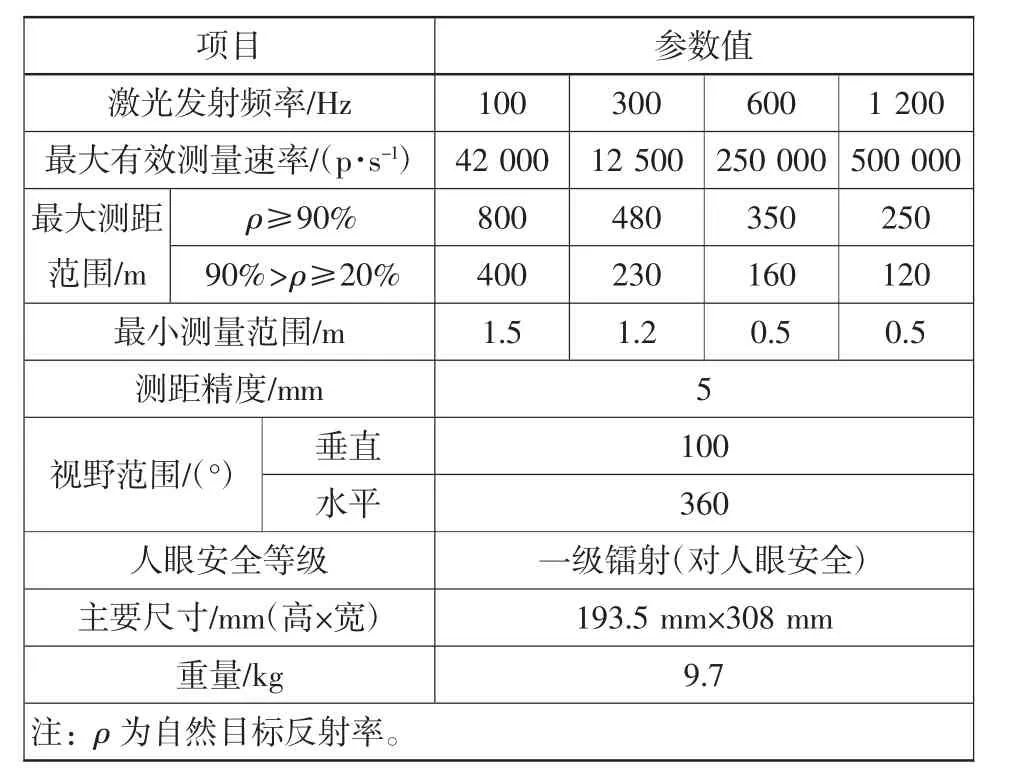
表1 Riegl VZ-400i 技术参数Table 1 Riegl VZ-400i technical parameters

表2 Riegl VZ-400i 与传统测量仪器参数对比Table 2 The comparison of parameters between Riegl VZ-400i and traditional instruments
3 三维激光扫描系统的应用
Riegl VZ-400i 定点三维激光扫描系统在香港三跑工程的应用主要包括:陆域高程测量,搅拌桩地基处理溢出物测量以及边坡监测测量等。三维激光扫描系统在香港三跑工程的应用流程图如图4 所示。

图4 Riegl VZ-400i 应用流程Fig.4 Application flow chart of Riegl VZ-400i
3.1 精度分析
选择在天气晴朗、通视条件良好,平整度较好的一块区域(200 m×200 m)提前进行全站仪地形测量,数据间距8 m/点,作为系统外符合(仪器与全站仪数据进行的精度比对);提前根据现场情况,制定好扫描路线,每50 m 架设Riegl VZ-400i,共3 站,每站达到50%以上重叠度,在此区域均匀放置30 个由特殊材料制作成的圆形反光片,用以Riegl VZ-400i 进行内符合(仪器各测站数据进行的精度比对)[8]。试验现场见图5,内、外符合比对结果见表3 和表4。

表4 外符合比对Table 4 Comparison of outer coincidence
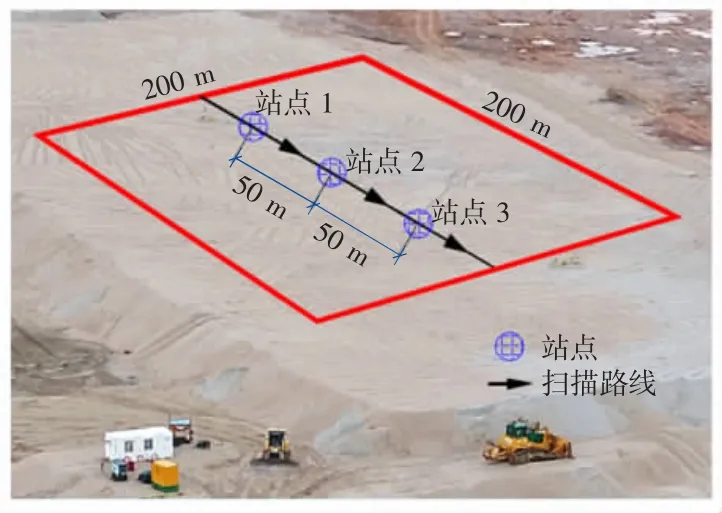
图5 Riegl VZ-400i 扫描站点和路线图Fig.5 Scanning station points and route of Riegl VZ-400i

表3 内符合比对Table 3 Comparison of inner coincidence
根据JTS 181-5—2012《疏浚与吹填工程施工设计规范》,地形点平面互差不应大于0.04 m,高程测量误差不应大于0.05 m。由表3 可知,平面互差和高程互差均满足要求;由表4 可知,Riegl VZ-400i 与全站仪高程值平均互差为0.04 m,合格率96.9%,结果基本满足要求,经统计后发现,互差较大的点(约20 个)基本分布在距离站点较远的边缘位置和重叠度较低的区域。
3.2 陆域高程测量
陆域高程测量包括场地整平区、水力管头吹填作业区和陆域推填施工区测量等,高峰期日测量面积约60 万~70 万m2/d。
Riegl VZ-400i 定点三维激光扫描系统的外业采集数据主要工作内容包括:根据测量区域环境制定扫描路线,对仪器的GNSS 接收机进行比对,将仪器安装在车上并设置扫描参数;测量实施过程中,按照50~100 m 的间距布置扫描站点,相邻扫描站点转换时,行车速度控制在10 km/h;每个站点的扫描时间为5 min,每个站点获取测量数据的有效覆盖范围可达150~200 m。按照上述方法进行外业测量有利于测量数据的拼接,提高数据质量。车载激光安装见图6。

图6 Riegl VZ-400i 车载Fig.6 Riegl VZ-400i vehicle-mounted
以面积约40 万m2(1000 m×400 m)的陆域测量为例,采用Riegl VZ-400i 定点三维激光扫描系统进行数据采集,扫描站点布置和行车路径示意图见图7,测量数据的采集约耗时2 h;若采用传统手持RTK 进行数据采集,则需耗时约5.5 h。Riegl VZ-400i 定点三维激光扫描系统的使用不仅大大提高了工作效率,还降低了外业测量的工作强度。

图7 陆域测量扫描站点和路径图Fig.7 Scanning station points and route of land measurement
3.3 搅拌桩地基处理溢出物测量
本项目的地基处理工艺包括陆上深层水泥搅拌桩、高压旋喷桩、强夯密实、振冲密实等。其中陆上深层水泥搅拌桩和高压旋喷桩在施工过程中会产生溢出物,这些溢出物需与水泥和砂按一定比例混合后再作为填料使用,为便于回填材料管理和提高资源的利用率,需对其进行精确测量。
溢出物因其土质松软湿润,地势高,地形高差变化大等特点,导致传统测量难以实施。采用Riegl VZ-400i 定点三维激光扫描系统进行溢出物测量,利用其垂直方向扫描开角大(仰角40°/俯角60°),可通过调整基座来改变激光在垂直方向上的发射倾斜度等优势,能有效地提高站间数据的重叠度及减少扫描盲区,实现较为完整地获取溢出物的细节数据的目标,为后续回填材料管理提供了准确的数据支撑。溢出物测量扫描站点布置和行车路径示意图见图8。
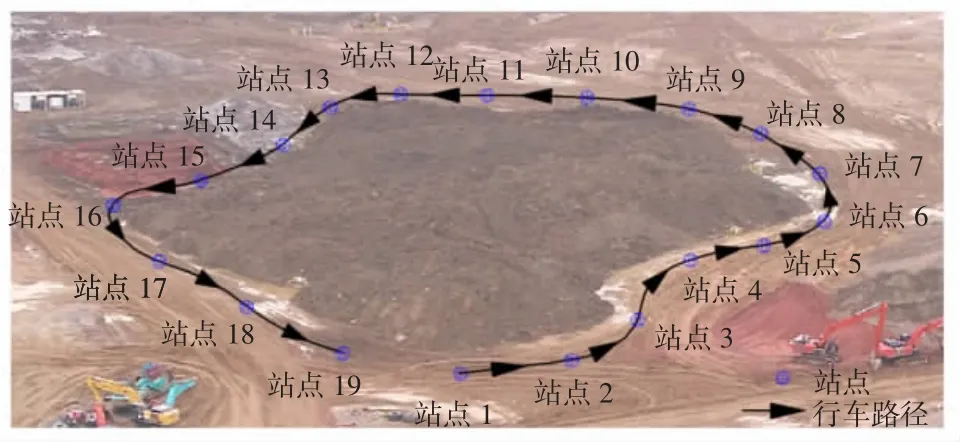
图8 溢出物测量扫描站点和路径图Fig.8 Scanning station points and route of spill measuremeat
3.4 边坡监测测量
为确保回填作业的安全性及提升回填施工计划的可执行性,需尽量准确地获取回填边坡的坡度数据和潮间带高程数据。通过在距坡顶1~2 m的位置架设Riegl VZ-400i 定点三维激光扫描系统,利用其扫描覆盖范围广的优势(可覆盖边坡范围约13~15 m),可实现边坡和潮间带高程数据采集的完整性。特征断面见图9。

图9 特征断面图Fig.9 Typical section drawing
以周长约1.5 km 的边坡区域为例,通过Riegl VZ-400i 定点三维激光扫描系统可覆盖危险测量区域约1.5 万m2。监测实例见图10。

图10 仪器架设位置和覆盖范围线Fig.10 Scanning position and cover scale line
通过Riegl VZ-400i 定点三维激光扫描系统进行边坡监测测量,不仅确保测量数据的准确性,也保障了测量人员的人身安全。
4 结语
Riegl VZ-400i 定点三维激光扫描系统在香港三跑工程上的应用,较大程度地改善了传统单点测量仪器数据密度不足、作业效率低等问题,并凭借其高精度、高效和安全等特点,完成了多种复杂环境下的测量工作,且数据信息丰富,算量更精准,能够及时为施工提供较好的参考。如果对系统进一步改进,如小型沙滩车代替三脚架、基座安装升降平台等,可适应更多不同的测区环境和减少扫描盲区,更好地应用于其他大型基建项目。
随着信息技术、科学技术的日益发展,三维激光扫描技术愈加成熟,其运用的领域也愈加广泛,具有良好的应用前景。