葡萄分层旋抛式清土起藤机高效旋抛刀设计与试验
2022-03-11杨启志杨鑫宇赫明胜张若瑜文天拟施爱平
杨启志,杨鑫宇,赫明胜,张若瑜,文天拟,施爱平
葡萄分层旋抛式清土起藤机高效旋抛刀设计与试验
杨启志,杨鑫宇,赫明胜,张若瑜,文天拟,施爱平
(江苏大学农业工程学院,镇江 212013)
针对中国西北地区酿酒葡萄清土作业缺乏与土壤颗粒群相互作用的研究,凭经验设计使得单层旋抛清土方法效率低以及清土部件功耗高的问题,设计了一种分层旋抛式清土起藤机并对旋抛刀与土壤相互作用进行研究。首先,根据中国西北地区酿酒葡萄种植及清土的农艺要求,完成分层旋抛刀的设计,然后对旋抛式清土起藤机的运动进行理论分析,确定影响旋抛刀功耗和抛送距离的主要因素,并通过EDEM—Recurdyn耦合仿真,以旋抛刀不同焊接角度、转速及整机的前进速度为试验因素,以清土率、旋抛刀扭矩为评价指标,分析土壤离散颗粒群与旋抛刀之间的相互作用,得到最优参数组合,进一步基于台架试验对仿真试验进行验证。结果表明,当旋抛刀焊接角度为30°,转速为270 r/min,前进速度为0.4 m/s时,清土率为49.1%,旋抛刀平均扭矩为13.09 N·m,土壤抛送距离集中在1.52~1.75 m之间,与仿真优化结果(清土率为55.9%)相对误差为13.8%,研究结果可为后续研制分层旋抛式清土起藤机提供理论依据及技术参考。
农业机械;试验;仿真;分层旋抛式清土起藤机;旋抛刀;EDEM—Recurdyn
0 引 言
中国宁夏地区的贺兰山东麓是葡萄生长的天然沃土,然而由于该地区特殊的地理环境,冬季气候寒冷干燥,且时常伴有较大的风沙,极易导致葡萄藤蔓风干和冻伤,目前普遍采取冬季覆土埋藤以及春季清土起藤来应对气候变化[1-2],这直接增加了中国西北酿酒葡萄产区葡萄种植的复杂程度,尤其是在春季清土起藤环节,使得酿酒葡萄产业的种植成本直线上升,长久居高不下。目前国内已基本实现冬季覆土环节完全机械化,春季清土作业仍以人工和半机械化作业为主[3],因此发展高效清土起藤的方法与技术是解决当前葡萄酒产业停滞不前的关键。
国外优质葡萄种植园主要集中在温带、亚热带等地区,不需要进行冬季埋土作业及春季清土作业,故未见有相关清土机的研究。近些年国内学者及农机企业对于酿酒葡萄清土机进行了研发,并取得了一些研究成果,如宁夏智源与宁夏大学合作研制了葡萄藤起藤自动除土机,通过前端叶片进行旋转清土,同时借助后方刮板辅助清土[4],但是存在整机功耗大,清土效果一般,实际操作难度大等问题;李法健[5]设计了一种叶片旋转式清土机,通过拖拉机提供动力,清扫叶片旋转清土,对于结实性土壤清除效果较差;马帅等[6]设计了一种组合式葡萄藤单边清除机,通过刮板与叶轮配合清土,但是清土效率低,核心区域剩余覆土过多;王文斌[7]设计了一种螺旋式葡萄防寒土清除机,作业时机器将土壤旋耕打碎并输送到行间,通过液压装置进行避障,但是由于整机的外形尺寸过大,不易操作,易损伤葡萄藤;周伟彬[8]设计了一种组合式葡萄起藤机,通过拖拉机牵引,推土板配合清扫盘清除覆土,清土装置在液压控制下完成避障,但是由于整机外形尺寸过大,需要跨垄作业,实际应用中刮土板与清扫盘作业速度不匹配等问题,作业难度较大,因此,为了加快清土起藤的发展,减少整机的作业功耗,提高清土率,有必要对旋抛刀与防寒土颗粒的相互作用进行分析,形成分层旋抛式清土起藤机的设计理论,为系列化研制分层旋抛式清土起藤机打下基础。
众所周知,西北地区土壤干燥且沙性较大,是典型的农业工程领域的离散颗粒群,其与机械部件的动态相互作用问题一直是当前研究的难点。近些年随着计算机技术的快速发展,国内很多学者对EDEM—Recurdyn耦合做了大量研究,可以更好地分析颗粒与机械部件间的接触作用及颗粒的运动,已广泛应用在农业机械、工业机械等研发过程[9-12],有效地缩短了研发周期。中国农业科学院纪龙龙[13]采用EDEM-Recurdyn耦合的方法模拟马铃薯干式刷拖清土装置的清土过程。马帅等[14]基于EDEM-Recurdyn耦合仿真的方法,模拟了整机的避障和清土作业过程,并设计了一种可以自动躲避障碍并完成清土任务的物理样机。
因此本文根据中国西北地区酿酒葡萄的种植模式,基于EDEM-Recurdyn耦合仿真土壤颗粒与旋抛刀相互作用的研究,拟解决传统旋抛式清土起藤机功耗过大,清土效率低等问题,为分层旋抛式清土起藤机的设计提供参考依据。
1 分层旋抛式清土起藤机整机结构及原理
1.1 农艺要求
通过实地调研发现,宁夏大部分地区冬季埋藤的作业模式为将葡萄藤沿着土垄摆成一条直线,然后通过土垄两侧土壤对其进行掩埋,土垄横截面呈梯形,本文主要研究碎砂石类型土壤,以宁夏贺兰山东麓的青铜峡鸽子山产区土垄为例,其上端宽度为600~700 mm,下底宽度为1 200~1 300 mm,高度为500~600 mm,水泥柱横截面为边长100 mm的正方形,葡萄藤上部埋土高度为250~350 mm,葡萄藤距水泥边缘偏差为50~100 mm,其底层距地面为50~100 mm,如图1所示。
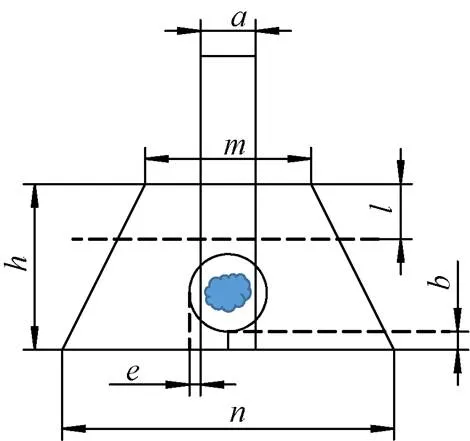
注:m为土垄上端宽度,mm;n为土垄下底宽度,mm;h为土垄高度,mm;a为水泥柱横截面边长,mm;l为上部埋土高度,mm;e为葡萄藤距水泥边缘偏差,mm;b为底层到地面距离,mm。
1.2 整机结构及工作原理
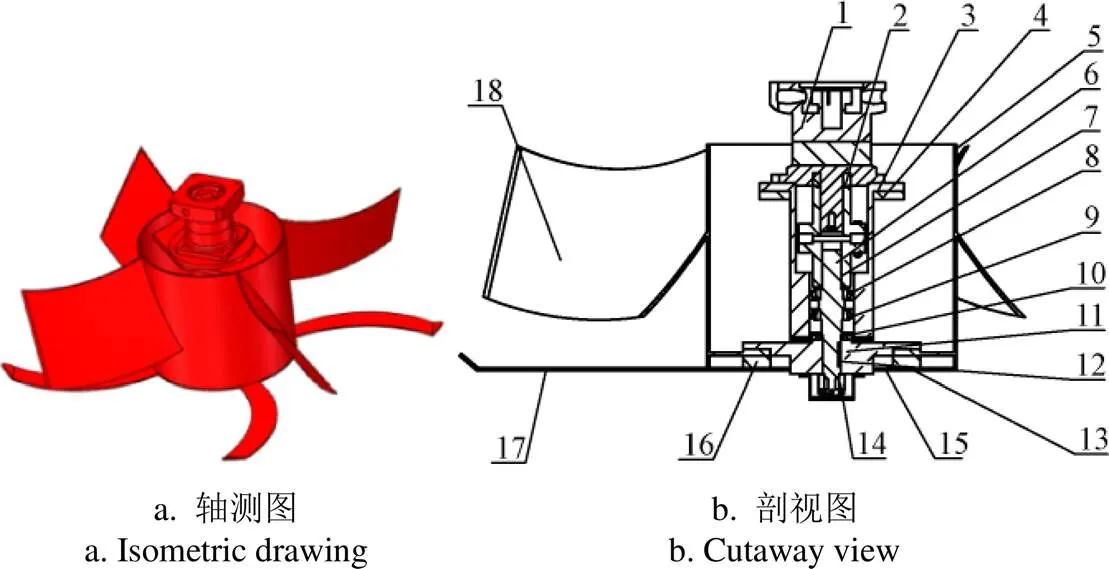
分层旋抛式清土起藤机主要用来清除大量的侧边土壤,其通过液压控制,有上、下两层旋抛刀组成,其中上层旋抛刀可以清除大部分外侧覆土,底层旋抛刀主要对葡萄藤底层的土壤起到松动作用,本文重点将对分层式旋抛清土起藤机旋抛刀进行设计。整机结构如图2所示。

1.三点悬挂架 2.变速箱 3.机架 4.小型液压站 5.柴油机 6.皮带轮 7.轴承座 8.风机 9.风管 10.分层旋抛装置 11.旋抛部件横向伸缩装置 12.旋抛部件纵向伸缩装置
2 旋抛刀结构设计及清土机理
2.1 旋抛刀结构设计
根据春季起藤的农艺要求,旋抛装置不仅可以清除葡萄藤外侧的防寒土,而且对底部土壤起到松动作用。主要包括液压马达、上法兰盘、轴座板、凸缘联轴器、轴、圆锥滚子轴承、下法兰盘、上层旋刀以及下层旋刀等零件,液压马达传递动力,轴与联轴器和下法兰盘通过平键连接,轴带动下法兰盘转动,进而带动整个旋抛部分转动,轴的底部通过开槽锁紧螺母连接,至此完成了整个装置的动力传输过程。因葡萄园内环境较为恶劣,故在轴底部安装尾端盖,在一定程度上起防尘作用,如图3所示。
1.液压马达 2.联轴器 3.上法兰盘 4.轴座板 5.轴 6.旋转辊筒 7.平键Ⅰ 8.轴承Ⅰ 9.轴承Ⅱ 10.末端盖 11.下法兰盘 12.平键Ⅱ 13.尾端盖 14.锁紧螺母 15.马达法兰 16.法兰 17.下层旋抛刀 18.上层旋抛刀
2.1.1 上层旋抛刀设计
上层旋抛刀主要用来清除葡萄藤的上侧覆土,以供冬季埋藤时再次使用,其作业效果和功耗与其自身的形状以及结构参数相关,目前常见的旋抛刀类型有直线、抛物线、圆弧线、螺旋线等形式。抛物线、螺旋线是通过建立无数个孤立点并连接,自身规律很难直接体现出来,曲面的滑切性也无法完整的表达,且加工极为困难,因此选择旋抛刀为偏心圆弧型曲线,其参数如图4所示。根据宁夏地区葡萄藤埋土尺寸设计旋抛刀高度为300 mm,旋抛刀长度为450 mm,旋抛刀厚度为8 mm,旋抛刀刀柄处距离为50 mm,其为刀柄与刀口连线处夹角,通常取10°~20°,本文取15°,为圆弧型曲线弯曲角,根据文献[15]取140°,为旋抛刀刀口切削角,一般取25°~35°,本文取25°。
2.1.2 下层旋抛刀的设计
下层旋抛刀作为松土部件,主要用来清除葡萄藤下方的覆土,并对底部含水率较高的紧实土壤起到松动作用,为后续气吹式清土创造有利的条件,因此下层旋抛刀参考旋耕刀设计,其结构参数如图5所示。其中为下层旋抛刀的长度,因其清除葡萄藤底部土壤,故设计长度为500 mm,为提高刀片的切土性能,减小工作阻力,根据经验,折弯角根据经验一般取100°~130°,本文取130°,旋抛刀前端为40 mm,旋抛刀刀柄为60 mm,为避免损伤葡萄藤,上层旋抛刀与下层旋抛刀间留有200 mm的间距,刀片的厚度为10 mm。
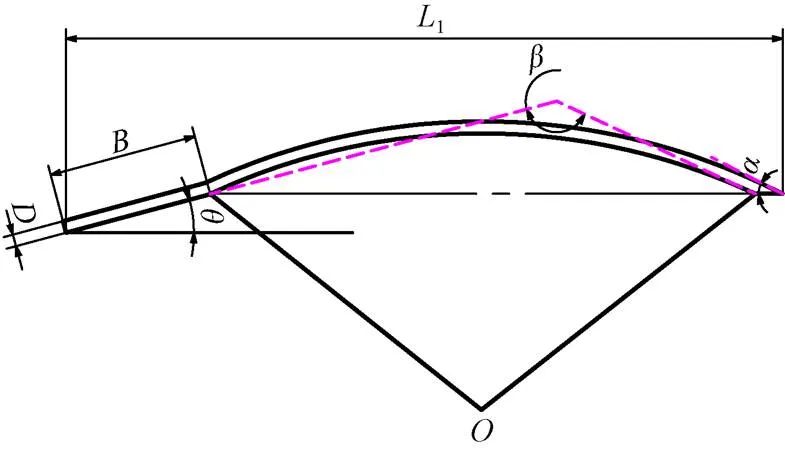
注:L1为旋抛刀长度,mm;D为旋抛刀厚度,mm;B为旋抛刀刀柄处距离,mm;θ1为刀柄与刀口连线处夹角,(°);β为圆弧形曲线弯曲角,(°);α为旋抛刀刀口切削角,(°)。
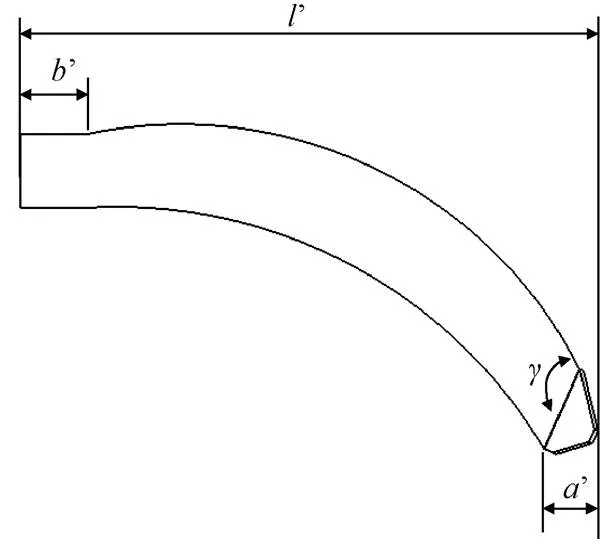
注:l’为旋抛刀长度,mm;γ为旋抛刀折弯角,(°);a’为旋抛刀前端长度,mm;b’为旋抛刀刀柄,mm。
2.2 旋抛刀清土机理分析
2.2.1 旋抛刀的受力分析
旋抛机构在拖拉机牵引下对防寒土进行旋抛,主要受到的作用力为土壤对于旋抛刀的挤压力,切削阻力以及摩擦力等,对土壤颗粒进行受力分析,得到如图6所示旋抛刀在工作时的受力示意图,因宁夏鸽子山地区土壤以沙壤土为主,在实际作业过程中,切削刃处阻力较小,所以在后续分析过程中忽略其阻力带来的影响。
由旋抛刀工作受力分析图6可知:
F=Fcos+Fsin(1)
F=Fsin+Fcos(2)
其中F在土壤切向方向的阻力主要由两部分组成,一部分是土壤与旋抛刀接触的摩擦力F,另一部分为土壤粘结在旋抛刀上方的粘结力F,即:
F=F+F(3)
鸽子山地区葡萄园内土壤本征参数的测量,土壤的含水率极低,因此忽略土壤在旋抛刀上的粘结力,旋抛刀在前进方向及水平方向上的阻力分别为

注:Fx为旋抛刀在前进方向上的作用力,N;Fy为土壤对旋抛刀的水平作用力,N;FN为土壤法向压力,N;Ft为土壤沿旋抛刀的切向阻力,N;β为旋抛刀的弯曲角,(°);θ为旋抛刀与辊筒间焊接的角度,(°)。
F=Fcos+Fsin(4)
F=Fcos+Fsin(5)
旋抛刀在工作时前进方向上所受到的阻力F为来自前进方向土壤的作用力。
2.2.2 旋抛刀的扭矩分析
同一地区土垄的横截面是一定的,所以刀片的半径是确定的,刀片的弯曲角度可根据文献直接选取,土壤对旋抛刀的扭矩大小为
=F·=(F·coscos+Fsincos)(6)
其中


整理得:

式中为刀片所受扭矩,N·m;F为科氏力,N;为土壤质心到辊筒的中心距离,m;为土壤的质量,kg;为角速度,rad/s;d/d为土壤颗粒运动的相对速度,mm/s;为旋抛刀的转速,r/min;为摩擦系数。
由式(7)可得,旋抛装置的转矩[16-17]与其自身的转速、刀片半径、清除土壤的质量、旋抛刀的焊接角度、旋抛刀弯曲角以及土壤与旋抛刀间的摩擦系数有关。
2.2.3 土壤颗粒在空气中的运动分析
在旋抛刀作用下,大量的土壤会在离开刀片边缘后抛向机器前进方向的斜前方[18],以土壤颗粒为坐标原点,机器的前进方向为轴,土壤被抛出的方向为轴,重力的方向为轴。土壤脱离旋抛刀时间后,以速度向斜前方抛出,土壤运动的轨迹方程为

式中v为土壤运动速度,mm/s;v为机器前进速度,mm/s;为作业时间,s;为土壤抛送距离,mm;为旋抛刀回转半径,mm。
由式(9)可知,土壤的抛送距离与机器前进速度、旋抛刀的旋转速度、回转半径以及刀具焊接角度有关,根据农艺要求,刀片的半径是一定的,故其与前进速度、刀具回转速度以及焊接角度有关,在后续仿真及试验中将对这3个因素进一步分析。
3 旋抛清土机理仿真分析
3.1 土垄离散元模型
本研究仿真的土壤主要为宁夏地区葡萄园种植基地碎沙石型土壤,该土壤沙性较大,黏性较小,不同土层的土壤本征参数都不同。通过对于土壤粒径的测量可知,实际葡萄园内土壤的粒径相对较小,如果按照实际测量的土壤粒径在EDEM软件中进行建模,则会导致土垄的颗粒数量太多,增加计算量[19-21]。经过春季返潮,底层土壤的含水率相对于上层土壤更高,土壤间会有粘结现象,所以底层土壤采用块状三球体形状,中间层土壤采用双球体形状,顶层土壤则是由砂粒土和部分碎砂石组成,通过测量碎砂石和砂土的比例,采用单球体和三球体混合建模,其中单球体数量占顶层土壤70%,三球体数量占30%,土壤粒径为5 mm。采用环刀法及土壤直剪试验,利用泊松比公式及剪切模量公式,获得不同层土壤的本征参数,并导入EDEM软件材料数据库模块,以此获得土壤颗粒间接触参数的取值范围,最终确定的不同层土壤仿真参数如表1所示。
表1 不同土壤层离散元仿真参数
经过实地调研,葡萄藤外侧防寒土横截面呈梯形,在Solidworks中创建一个梯形土垄,其横截面为1 000 mm×600 mm×300 mm×300 mm(长×下底×上底×高),先在EDEM中创建一个基本尺寸为5 000 mm× 5 000 mm(长×宽)的平面作为仿真平面,将创建的土垄模型导入到EDEM中,在纵向对其进行分层处理,逐次建立3层不同土壤层,土壤粒径为5 mm,颗粒倍径为0.8~1.2随机生成,最终生成200 000个土壤颗粒,生成的仿真示意图如图7所示。设置相应参数后,在Recurdyn软件[22-23]中运行耦合仿真,仿真过程如图8所示。在EDEM后处理设置质量检测区域,旋抛刀具前方的土壤均属于未成功清除的土壤,对其进行称量,土壤的质量90.791 kg。

图7 土垄仿真模型
图8 仿真过程
3.2 单因素分析
3.2.1 试验设计
根据上文旋抛刀清土机理的理论分析,分层旋抛式清土起藤机对清土率产生主要影响有旋抛刀焊接角度、机器前进速度以及刀具转速。因此选取这3个主要因素研究对清土量,抛送距离及刀具转矩的影响。
刀具焊接角度是影响旋抛刀清土的重要因素。据调研及实地试验,旋抛刀焊接角过大对覆土的清除质量较差,选取旋抛刀焊接角分别为0°、30°、45°及60°进行试验。根据项目清土要求,机器前进速度低于0.4 m/s无法完成清土任务,因此前进速度设置为0.4、0.7 、1.0、1.3 m/s。根据参考文献[24],设定刀具转速为50 、100、200、300、400、500 r/min。单因素试验时,设定前进速度为0.7 m/s,刀具转速为240 r/min,刀具焊接角为30°时对于清土量,抛送距离以及所需扭矩的影响。
清土量为土壤总质量减去未清除的土壤质量。清土率为清土量除以土壤总质量。
3.2.2 试验结果
仿真结果如表2所示。由表中焊接角度数据可知,旋抛刀焊接角为30°清土量最多,其次是45°和60°,0°清土量最少,刀具扭矩随着焊接角度的增加先减小后增加,抛送距离随着焊接角度的增加逐渐变大,其中鸽子山地区葡萄园行间距为3~3.5 m,所以全部焊接类型刀具抛送距离均在可接受范围内。
表2 单因素试验结果
由表2中可以看到清土量不断减少,土壤抛送距离、刀具扭矩随着前进速度的增加不断增加。故选取机器前进速度为0.4~0.7 m/s进行正交试验。
随着刀具转速的增加,清土量越多,土壤抛送的距离越远,刀具扭矩随着刀具转速的增加先减小后增大,当转速为50~100 r/min时,由于土壤的抛送距离较小,抛出的土壤又被二次清除,导致刀具扭矩较大,考虑刀具功耗及清土率,选择刀具转速为200~300 r/min进行正交试验。
3.3 分层旋抛式清土起藤机正交试验设计
3.3.1 正交仿真试验方案设计
为找到旋抛刀最佳工作参数组合,以旋抛刀焊接角度()、转速()及前进速度()为影响因素,以扭矩、清土率为评价指标,进行正交试验设计,根据前文的单因素仿真及理论分析,旋抛刀焊接角度在0°~60°取值,转速在200~300 r/min取值,前进速度在0.4~0.7 m/s取值。将上述三因素分别取4个水平,试验因素水平如表3所示。试验采用三因素四水平,并添加一列空白列作为误差列,选用L16(44)正交表。在EDEM后处理模块设置质量检测区域,测量在旋抛刀具作业后未清除土壤质量。
3.3.2 正交试验结果分析
通过EDEM导出旋抛刀所受的扭矩,由表4对于清土量的极差分析可知,影响旋抛刀清土效果的主次因素依次为旋抛刀的焊接角、前进速度、转速,其最优搭配为当旋抛刀焊接角为30°,刀具转速为300 r/min,前进速度为0.4 m/s。对刀具扭矩的极差分析可知,影响旋抛刀扭矩的主次因素依次为旋抛刀的焊接角,前进速度,刀具的转速,其最优搭配为当旋抛刀焊接角为30°,刀具转速为270 r/min,前进速度为0.4 m/s。因配合风力吹送式清土复式作业,故速度需保持一致,考虑整机的工作效率,最终选取旋抛刀焊接角为30°,刀具转速为270 r/min,前进速度为0.4 m/s。

表3 因素水平表

表4 正交试验结果极差分析
注:K(=1, 2, 3, 4)表示水平所对应试验指标的数值之和。
Note:K(=1, 2, 3, 4) represents the sum of the values of the test indicators corresponding to thelevel.
通过SPSS软件对两种评价指标进行方差分析,如表 5所示,以清土率为评价指标,刀具焊接角度影响极显著,前进速度影响显著,决定系数2=0.952,调整决定系数2adj=0.879;以扭矩为评价指标,焊接角度影响极显著,前进速度影响显著,决定系数2=0.949,调整决定系数2adj=0.873,表明模型可信,与极差分析结果一致。
选取旋抛刀焊接角度为30°,刀具转速为270 r/min,前进速度为0.4 m/s再次进行仿真试验,如图9所示,其中未清除土壤质量为40.028 kg,清土率为55.91%,其需要的平均扭矩为8.92 N·m,土壤抛送距离集中在1.44~1.67 m内。
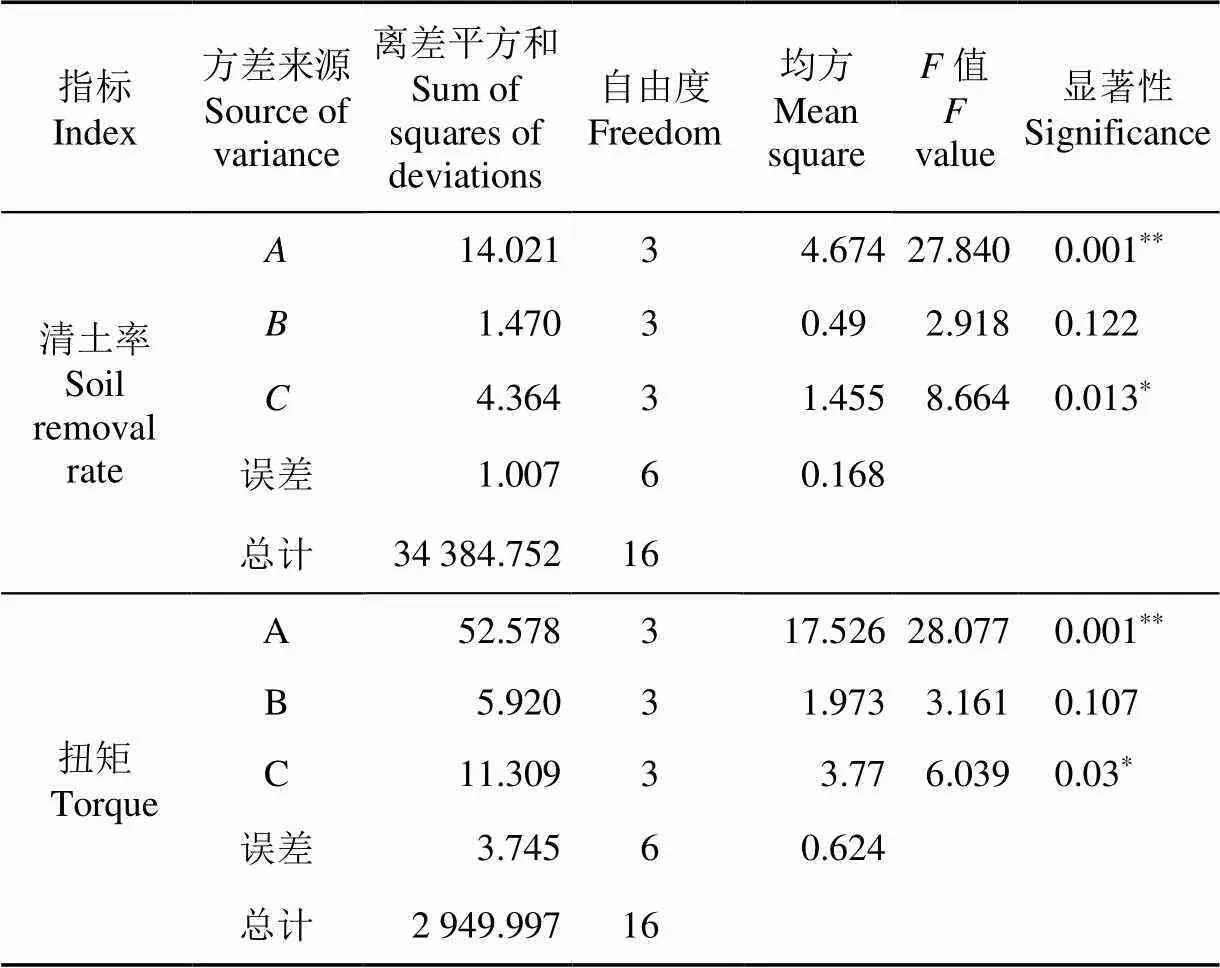
表5 清土率与扭矩方差分析
注:**表示极显著(<0.01);*表示显著(0.01<<0.05)。
Note: ** means highly significant (<0.01); * means significant (0.01<<0.05).
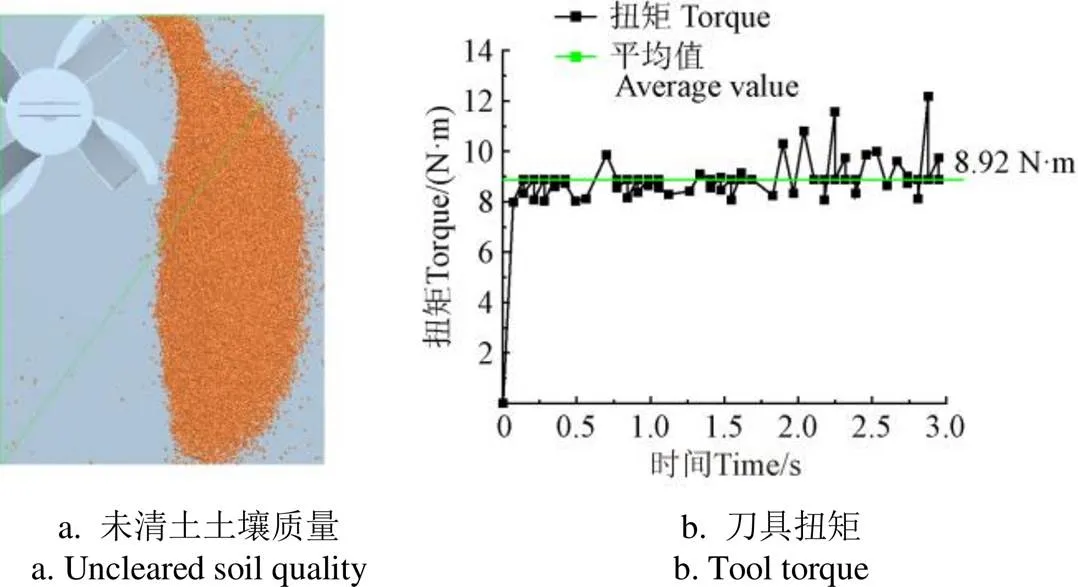
图9 最优组合试验结果
4 分层旋抛式清土起藤机旋抛台架试验
4.1 试验材料
试验地点选在江苏大学农业工程学院土槽试验室内,在室内搭建长为3 m,上底为600 mm,下底为600 mm,高为100 mm的地基,确保底部旋抛刀在工作过程中不会与水泥地面接触,并验证其对于葡萄藤底层土壤是否起到松动作用,然后在地基上继续搭建长为3 m,上底为300 mm,下底为600 mm,高为300 mm的梯形土垄,土壤采用宁夏鸽子山葡萄园土壤。每次试验前通过旋耕、压实、浇水以及松土等方式对土垄进行预处理,试验前测量每层的含水率,使得每层的土垄与宁夏鸽子山地区葡萄园内的本征参数基本保持一致,通过设置尺寸线确保每次试验土垄尺寸一致,最后对土壤称量,为313 kg,确保每次试验时土壤的质量基本一致。土壤中埋入假藤,确保每次试土垄土壤参数与葡萄园内土壤一致,故采用台架试验是可行的。台架车通过电动车牵引,借助电动车的调速把手改变前进速度,根据伺服电机驱动器的速度控制模式进行转速的设置,通过相机的慢速功能,观察旋抛刀与土壤的相互作用,图10所示为台架试验的布置情况,研究不同因素对于清土效果的影响。

1.电动车 2.试验土垄 3.试验台架车 4.旋抛刀具
4.2 不同因素对清土过程的影响
1)不同转速对清土过程的影响
旋抛刀在不同转速下进行清土试验,台架车的前进速度为0.5 m/s,测量工作过程中所需要的扭矩、土壤抛送距离以及清土率。通过测量大量土壤集中抛散区域估算其抛送距离,通过称重未清除土壤质量计算清土率。刀具扭矩随着转速的增加先减小后增大,在200~300 r/min时最佳,抛送距离随着转速的增加逐渐变大,综上在200~300 r/min时刀具转矩最小,清土效果最佳且抛送距离适中,与仿真试验相符。
2)不同前进速度对清土过程的影响
保持旋抛刀倾角为30°,刀具转速为240 r/min时,研究整机速度在0.4、0.7、1.0、1.3 m/s时未清除土壤质量、土壤抛送距离、刀具扭矩随着前进速度的增加不断增加。
3)不同刀具焊接角度对清土过程的影响
试验时保证台架车的前进速度为0.7 m/s,刀具转速为240 r/min,通过更换不同焊接角度的刀具,测量每次试验后未清除土壤质量、土壤抛送距离及刀具扭矩。其中0°焊接刀具清土效果最差,其次是60°、45°,焊接角度30°清土效果最好。刀具扭矩随着焊接角度的增加先增加后减小,土壤抛送距离随着焊接角度的增加逐渐增加,与仿真结果一致。
4.3 最优试验结果
选取旋抛刀焊接角度30°,刀具转速为270 r/min,前进速度为0.4 m/s时进行台架试验,重复3次取平均值,清土率为49.1%,旋抛刀平均扭矩为13.09 N·m,土壤抛送距离集中在1.52~1.75 m之间,与仿真结果的相对误差为13.8%。
5 结 论
1)基于当前葡萄园内试用的单层旋抛式清土起藤机缺乏旋抛刀具与土壤相互作用的动态理论研究,清土率低等问题,对分层旋抛式清土起藤机旋抛刀与土壤相互作用的研究,并对旋抛清土作业进行理论分析,确定影响整机功耗、抛送距离的主要因素为刀具焊接角度、刀具转速、机器前进速度。
2)分层旋抛式清土起藤机的仿真分析。通过EDEM-Recurdyn耦合,对不同焊接角的刀具、转速以及前进速度进行仿真分析,以清土率和扭矩为评价指标,通过正交试验获得分层式旋抛的最佳作业参数,当旋抛刀焊接角为30°,刀具转速为270 r/min,前进速度为0.4 m/s,得出清土率为55.9%,平均扭矩为8.92 N·m。
3)基于旋抛清土台架试验,对设计的分层旋抛式清土起藤机旋抛刀仿真结果进行验证,得出最优参数下旋抛刀具的清土率为49.1%,旋抛刀平均扭矩为13.09 N·m,仿真优化结果(清土率为55.9%)与台架试验结果的相对误差为13.8%,验证得出台架试验结果与仿真结果基本一致。
[1] 袁全春,徐丽明,马帅,等. 我国北方葡萄冬季埋土和春季清土作业的机械化现状与思考[J]. 中外葡萄与葡萄酒,2017(6):66-67.
[2] 张娟,李剑萍,王誉陶,等. 西北干旱地区气候变化及其对草地生产潜力的影响[J]. 生态科学,2020,39(3):182-192.
Zhang Juan, Li Jianping, Wang Yutao, et al. Climate change in arid regions of northwest China and its impact on potential grassland productivity[J]. Ecological Science, 2020, 39(3): 182-192. (in Chinese with English abstract)
[3] 赵慧,韩颖娟,张承明,等. 宁夏植被变化特征及其与气候、人类活动的关系[J]. 江苏农业科学,2021,49(14):220-226.
Zhao Hui, Han Yingjuan, Zhang Chengming, et al. Characteristics of vegetation change and its relationships with climate and human activities in Ningxia[J]. Jiangsu Agricultural Sciences, 2021, 49(14): 220-226. (in Chinese with English abstract)
[4] 陈智,万平,杨术明,等. 葡萄藤起藤自动除土机: 205755312U[P]. 2016-12-07.
[5] 李法键. 葡萄园防寒土清除机关键部件设计与分析[D]. 秦皇岛:河北科技师范学院,2019.
Li Fajian. Design and Analysis on Key Components of Vineyard Cold Soil Removal Machine[D]. Qinhuangdao: Hebei Normal University of Science and Technology, 2019. (in Chinese with English abstract)
[6] 马帅,徐丽明,邢洁洁,等. 叶轮旋转式葡萄藤埋土单边清除机研制[J]. 农业工程学报,2018,34(23):1-10.
Ma Shuai, Xu Liming, Xing Jiejie, et al. Development of unilateral cleaning machine for grapevine buried by soil with rotary impeller[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(23): 1-10. (in Chinese with English abstract)
[7] 王文斌. 葡萄清土开沟机设计研究[D]. 北京:中国农业大学,2015.
Wang Wenbin. Research and Design of Grape Vines Gigger[D]. Beijing: China Agricultural University, 2015. (in Chinese with English abstract)
[8] 周伟彬. 葡萄起藤机的设计[D]. 银川:宁夏大学,2017.
Zhou Weibin. Design of Grape Vine Digging Machine[D]. Yinchuan: Ningxia University, 2017. (in Chinese with English abstract)
[9] 刘彩玲,黎艳妮,宋建农,等.基于EDEM的离心甩盘撒肥器性能分析与试验[J].农业工程学报,2017,33(14):32-39.
Liu Cailing, Li Yanni, Song Jiannong, et al. Performance analysis and experiment on fertilizer spreader with centrifugal swing disk based on EDEM[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(14): 32-39. (in Chinese with English abstract)
[10] Zhu X Q, Pan L Y, Huang Y J. Dynamic analysis of DH17 bulldozer by using RecurDyn and EDEM[C]. 上海:第八届国际振动工程会议,2021.
[11] 陶芸,谢方平,肖名涛. 偏心弹射式排肥器设计与仿真试验[J]. 中国农机化学报,2020,41(11):26-32.
Tao Yun, Xie Fangping, Xiao Mingtao. Design and simulation test of an eccentric ejection fertilizer apparatus[J]. Journal of Chinese Agricultural Mechanization, 2020, 41(11): 26-32. (in Chinese with English abstract)
[12] 王万章,刘婉茹,袁玲合,等. 基于EDEM的收获期小麦植株离散元参数标定[J]. 河南农业大学学报,2021,55(1):64-72.
Wang Wanzhang, Liu Wanru, Yuan Linghe, et al. Calibration of discrete element parameters of wheat plants at harvest period based on EDEM[J]. Journal of Henan Agricultural University, 2021, 55(1): 64-72. (in Chinese with English abstract)
[13] 纪龙龙. 马铃薯干式刷脱清土装置试验与优化[D]. 北京:中国农业科学院,2021.
Ji Longlong. Experiment and Optimization of Potato Dry-type Brush Roller Cleaning Device[D]. Beijing: Chinese Academy of Agricultural Sciences, 2021. (in Chinese with English abstract)
[14] 马帅,徐丽明,袁全春,等. 自动避障式葡萄藤防寒土清土机研制[J]. 农业工程学报,2020,36(7):1-10.
Ma Shuai, Xu Liming, Yuan Quanchun, et al. Development of an automatic obstacle-avoidance-type vine anti-cold soil cleaner[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(7): 1-10. (in Chinese with English abstract)
[15] 赵淑红,王加一,陈君执,等. 保护性耕作拟合曲线型深松铲设计与试验[J]. 农业机械学报,2018,49(2):82-92.
Zhao Shuhong, Wang Jiayi, Chen Junzhi, et al. Design and experiment of fitting curve subsoiler of conservation tillage[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 82-92. (in Chinese with English abstract)
[16] 吕金庆,尚琴琴,杨颖,等. 锥盘式撒肥装置的性能分析与试验[J]. 农业工程学报,2016,32(11):16-24.
Lv Jinqing, Shang Qinqin, Yang Ying, et al. Performance analysis and experiment on granular fertilizer spreader with cone disc[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(11): 16-24. (in Chinese with English abstract)
[17] 胡东彬. 锥盘式撒肥装置的参数优化与试验研究[D]. 石河子:石河子大学,2021.
Hu Dongbin. Parameter Optimization and Experimental Research of Cone-disc Fertilizer Spreading Device[D]. Shihezi: Shihezi University, 2021. (in Chinese with English abstract)
[18] 白威涛. 槽式翻抛机工作部件的研究与设计[D]. 杭州:浙江理工大学,2012.
Bai Weitao. Study and Design of Working Parts of Troughed Compost Turner[D]. Hangzhou: Zhejiang University of Technology, 2012. (in Chinese with English abstract)
[19] 石林榕,赵武云,孙伟. 基于离散元的西北旱区农田土壤颗粒接触模型和参数标定[J]. 农业工程学报,2017,33(21):181-187.
Shi Linrong, Zhao Wuyun, Sun Wei. Parameter calibration of soil particles contact model of farmland soil in northwest arid region based on discrete element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(21): 181-187. (in Chinese with English abstract)
[20] 向伟,吴明亮,吕江南,等. 基于堆积试验的黏壤土仿真物理参数标定[J]. 农业工程学报,2019,35(12):116-123.
Xiang Wei, Wu Mingliang, Lv Jiangnan, et al. Calibration of simulation physical parameters of clay loam based on soil accumulation test[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(12): 116-123. (in Chinese with English abstract)
[21] 戴飞,宋学锋,赵武云,等. 全膜双垄沟覆膜土壤离散元接触参数仿真标定[J]. 农业机械学报,2019,50(2):49-56, 77.
Dai Fei, Song Xuefeng, Zhao Wuyun, et al. Simulative calibration on contact parameters of discrete elements for covering soil on whole plastic film mulching on double ridges[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(2): 49-56, 77. (in Chinese with English abstract)
[22] 王少杰,殷月,余圣锋,等. 基于RecurDyn-EDEM的装载机耦合动力学仿真分析[J]. 机械设计,2021,38(11):1-6.
Wang Shaojie, Yin Yue, Yu Shengfeng, et al. Dynamic analysis on loader coupling RecurDyn-EDEM[J]. Machine Design, 2021, 38(11): 1-6. (in Chinese with English based on abstract)
[23] 方会敏,姬长英,Chandio F A,等. 基于离散元法的旋耕过程土壤运动行为分析[J]. 农业机械学报,2016,47(3):22-28.
Fang Huiming, Ji Changying, Chandio F A, et al. Analysis of soil dynamic behavior during rotary tillage based on distinct element method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 22-28. (in Chinese with English abstract)
[24] 马帅,徐丽明,许述财,等.刮刷组合式葡萄藤防寒土清土机设计与试验[J/OL].吉林大学学报(工学版):1-17[2023-01-31]. https://kns.cnki.net/kcms/detail/22.1341. T.20220531.1620.001.html.
Ma Shuai, Xu Liming, Xu Shucai, et al. Design and experiment of grapevine cold-proof soil cleaner with combined scraping and brushing[J/OL]. Journal of Jilin University (Engineering and Technology Edition): 1-17[2023-01-31].https://kns.cnki.net/kcms/detail/22.1341.T.20220531.1620.001.html.
Design and experiment of the rotary throwing knife of wine grape cleaning machine
Yang Qizhi, Yang Xinyu, He Mingsheng, Zhang Ruoyu, Wen Tianni, Shi Aiping
(,,212013,)
Soil clearing operation can be one of the most challenging steps in the wine industry in recent years. The low efficiency can often be found in the single-layer rotary throwing during the soil cleaning operation of wine grapes in northwest China. It is still lacking in the interaction with the soil particles in cold soil, due to empirical design. In this study, a layered rotary throwing soil remover was designed to clarify the interaction between the soil and the rotary throwing knife. The rotary throwing cutter was then realized to balance the different functions of the upper and lower rotary throwing cutters. A dynamic analysis was carried out to determine the overall size of rotary throwing knives using RecurDyn software. Among them, the RecurDyn was a new generation of simulation software for multi-body system dynamics. The movement of the rotary throwing soil cleaning machine was theoretically analyzed to determine the main factors affecting the power consumption and throwing distance of rotary throwing knives. Specifically, the trapezoidal soil ridges in the cross section of 1 000 mm× 600 mm×300 mm ×300 mm (Length × Bottom bottom × Upper bottom × height) were established in the EDEM, according to the agronomic requirements of wine grape planting and soil cleaning. The coupled EDEM and RecurDyn simulation was conducted to analyze the interaction between the discrete particle group of cold-proof soil and the rotary throwing knife. Among them, the test factors were taken as the rotating speed of the rotary throwing knives with the different welding angles, and the forward speed of the whole machine. The evaluation indexes were set as the influence of the soil removal amount and the torque of the rotary throwing knife. An optimal combination of parameters was then obtained after optimization. Then, a three-factor four-level orthogonal experiment was designed to verify the reliability of the model using the analysis of variance. Further verification was also made using a bench test. A series of parameters were also selected in the bench test, including the cleaning rate of the machine, and the torque during operation under the conditions of different welding angles, the rotating and forward speeds, as well as the optimal combination under the conditions of various parameters. The results show that an optimal combination was achieved, where the the soil removal rate was 49.1%, the torque of the rotary throwing knife was 13.09 N·m, and the soil throwing distance was concentrated between 1.52-1.75 m, particularly when the welding angle of the rotary throwing knife was 30°, the rotating speed of the knife was 270 r/min, and the forward speed was 0.4 m/s. Excellent consistency was also obtained with the simulation and experimental. The findings can also provide the theoretical basis and technical reference for the subsequent development of grapevine soil cleaning and vine lifting machine.
agricultural machinery; test; simulation; layered rotary throwing soil remover; rotary throwing knife; EDEM-Recurdyn
10.11975/j.issn.1002-6819.2022.24.005
S220.1
A
1002-6819(2022)-24-0044-08
杨启志,杨鑫宇,赫明胜,等. 葡萄分层旋抛式清土起藤机高效旋抛刀设计与试验[J]. 农业工程学报,2022,38(24):44-51.doi:10.11975/j.issn.1002-6819.2022.24.005 http://www.tcsae.org
Yang Qizhi, Yang Xinyu, He Mingsheng, et al. Design and experiment of the rotary throwing knife of wine grape cleaning machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(24): 44-51. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2022.24.005 http://www.tcsae.org
2022-09-06
2022-11-22
国家科技重大专项子课题(2019YFD1002502、2019YFD1002505);宁夏重点研发计划重大项目(2018BBF02020);江苏省高校自然基金重点项目(19KJA430018);镇江市重点研发计划(现代农业)(NY2019015)
杨启志,教授,博导,工学博士,研究方向:机械动力学、移栽种植、田间管理机械等。Email:yangqz@ujs.edu.cn
