基于声呐历程累积图像的弱回波目标检测方法
2022-03-11斯佳成邓红超
斯佳成,邓红超
(上海船舶电子设备研究所,上海 201108)
0 引 言
反蛙人探测声呐是探测蛙人、无人潜航器(Unmanned Underwater Vehicle, UUV)等慢速小目标的主要手段,对于港口警戒、防御具有重要作用[1]。目标检测技术是声呐信号处理中的重要组成部分。然而在浅海近海环境下,主动声呐目标检测不仅受到海面、海底及海洋中大量散射体产生的混响干扰[2],还会受到非平稳的海洋环境噪声[3]的影响。除此以外,蛙人回波强度起伏也是目标检测的一大难点[4],当蛙人回波信噪比较低时,经典的自适应门限检测技术容易丢失目标[5],影响目标检测及后续跟踪、识别处理的稳定性。
为了提高目标检测的稳定性,尤其在低信噪比条件下的目标检测性能,本文借鉴检测前跟踪技术[6]的原理,利用连续多帧声呐图像的历程累积信息,辅助实现对慢速小目标的检测:对单帧声呐图像做背景归一化处理,并更新声呐历程累积图像,对图像各方位的数据进行 Radon恒虚警率(Radon Constant False Alarm Rate, Radon-CFAR)检测提取目标轨迹,辅助实现对运动目标的检测。
背景归一化处理的目的是抑制声呐背景中突发性噪声和静态混响等强回波干扰,以降低干扰信号在变换域的幅值。它主要利用强回波干扰的相关性:突发性噪声(如航船经过的噪声)一般会持续一段时间,它在单帧声呐图像上表现为距离维的亮线特征,即空间相关性;静态混响在海洋中的位置固定,且由于水声信道的慢时变特性,它在相邻多帧声呐图像的相同像素点上表现出时间相关性。本文根据这一特性采用空时背景归一化处理技术,使显示背景均匀平滑,而目标回波以信噪比的形式显示,更有利于后续能量累积处理。
声呐图像经背景归一化处理后,通过多帧累积形成声呐历程累积图像。由于目标运动的连续性,图像上的目标回波亮点形成亮线特征[7],其斜率代表目标的运动速度;而经处理后的“剩余”噪声、混响则表现出随机性。通过 Radon变换将图像做域变换,采用CFAR检测算法检测变换域上目标轨迹对应的亮点,可实现声呐历程累积图像上弱回波目标运动轨迹的检测。
1 算法流程
1.1 空时背景归一化处理
主动声呐接收信号经波束形成、匹配滤波、数据压缩处理后,得到声呐图像 f1,f2,…fn,空时背景归一化处理示意图如图1所示。假设当前帧声呐图像fn距离维上相邻像素单元的幅度服从独立同分布,通过对空域参考单元做平均,如式(1)所示,得到每个检测单元的空域背景估计强度 B1,n(x, y),它能够有效反应突发性噪声干扰的强度。假设相邻多帧声呐图像 f1,f2,…fn在同一像素单元的幅度服从相同的统计分布,对时域参考单元做平均可得到每个检测单元的时域背景估计强度,考虑到水声信道的慢时变特性可转化为递推形式,如式(2)所示[8],它能有效估计静态混响干扰的强度。

图1 空时背景归一化处理示意图Fig.1 Diagram of normalization processing of space-time background

式中:(x , y)表示声呐图像上像素点的坐标;l表示选取的空域参考单元数量;c表示背景学习速率。
空时背景归一化的处理方法是目标回波强度减去背景强度。对空域和时域背景估计值进行比较,当检测单元位于突发性噪声区时,空域背景估计值较大;当检测单元位于静态混响区时,时域背景估计值较大,因此背景强度由空域、时域估计值取大得到,如式(3)所示,g为空时归一化处理后的声呐图像:

1.2 声呐历程累积图像
声呐历程累积图像I集成了最近K帧声呐图像g的信息,每个方位上最左侧的数据对应当前帧声呐图像k个方位数据的最大值,它的数据更新公式为

式中:(x′,y)表示声呐历程累积图像的方位和距离,其中方位总数压缩为单帧声呐图像的1/k。目标回波经多帧能量累积后,与“剩余”噪声、混响的差异性逐渐显著:声呐历程累积图像中的蛙人回波亮点由于运动的连续性,形成亮线特征;而经归一化处理后的“剩余”噪声、混响由于随机性,其经多帧累积后在图像上不具有相关性,不能形成明显的线性轨迹。
1.3 Radon-CFAR检测
本文利用连续多帧声呐图像的历程累积信息,通过Radon变换实现域变换,将图像中目标短时线性运动轨迹变换为亮点信息,在变换域上采用单元平均CFAR检测完成目标轨迹提取,辅助实现对运动目标的检测。
Radon变换[9]是图像领域检测线性特征的有效手段,其处理方法是将单个方位的声呐历程累积图像I沿着投影角为θ的直线x cosθ+y sin θ- p= 0做线积分:

式中:R为Radon域图像;δ为Dirac函数;(θ,p)为变量确定线积分的路径。它反映了图像沿不同角度θ和不同距离p的投影特征,通过域变换将线检测问题转化为点检测问题。对于蛙人等弱回波强度的慢速小目标而言,其在一个历程周期内的运动轨迹呈一条倾斜的线段,通过Radon变换将轨迹上的蛙人回波幅值进行能量累加,将弱回波目标轨迹变换为Radon域的亮点特征。
空时归一化处理后声呐图像g上的像素单元一般符合高斯分布,经多帧累积及Radon变换处理后R(θ,p)的分布可以等效为多个独立同高斯分布的和,即R(θ,p)仍然符合高斯分布,因此采用单元平均CFAR检测算法检测Radon域的亮点特征。
CFAR检测器首先对输入的背景数据进行处理后确定门限,将此门限与输入信号相比,如输入信号超过了此门限则判定为有目标,否则,判定为无目标。单元平均CFAR检测算法的背景数据处理方式与1.1节中空域背景估计方式相同,通过检测单元附近的参考单元做平均可得到背景功率,它在高斯噪声背景下的检测门限Th[10]为

式中:l表示参与背景估计的单元格数量;Pf表示检测设定的虚警概率;α表示CFAR检测门限的系数,由式(7)计算得到。
经单元平均CFAR检测可以得到目标轨迹在变换域上的位置(θ,p),由此可得到目标短时运动的速度v= t an θ /T,T表示声呐脉冲发射周期,目标轨迹所在位置y = p / cosθ。
2 算法性能分析
本文算法利用声呐多帧累积信息,通过检测目标短时运动轨迹辅助完成目标检测,实现弱目标检测,本节研究算法的检测性能。声呐图像经空时背景归一化处理后近似服从高斯分布,单个像素单元的统计分布为

式中:K表示历程图累积的帧数,多帧图像累积后做Radon变换,其本质是对多帧图像的能量进行累加。目标由于运动的连续性形成回波亮线,因此目标在一个历程周期上的回波能够有效累加,而“剩余”混响经归一化处理后,在相邻多帧回波图像间不具有关联性,因此Radon变换的处理增益G为

Radon-CFAR检测算法的性能曲线如下图2所示,声呐历程累积图像共累计10帧回波数据,Pf设为0.01,参考单元数取20。虚线为常规CFAR检测算法的性能,实线为Radon-CFAR检测算法的性能,可以发现经多帧累积后,在相同信噪比条件下目标检测概率大幅提升,尤其在低信噪比的情况下也能达到较高的检测概率。
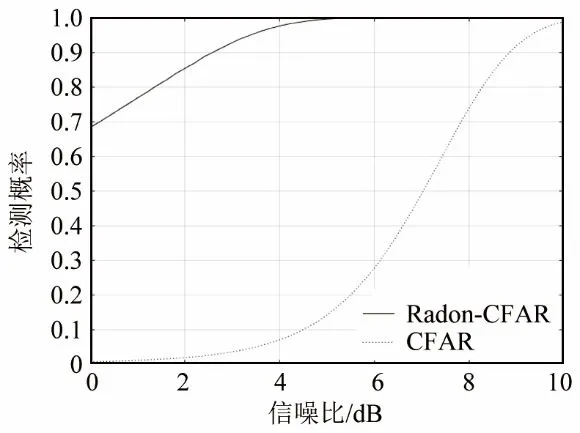
图2 常规CFAR和Radon-CFAR方法的检测性能曲线Fig.2 The detection performance curves of common CFAR and Radon-CFAR methods
3 试验数据验证
3.1 空时背景归一化处理
图3为浅海环境下主动声呐接收数据经波束形成、匹配滤波和数据压缩后的单帧声呐图像。图 4为经空时归一化处理后的单帧声呐图像。对比可以发现经归一化处理后声呐图像以信噪比形式显示,回波强度都被拉回到 0附近,且图像中的静态混响、突发性噪声等强干扰(大片的红色区和黄色区)都得到有效抑制。
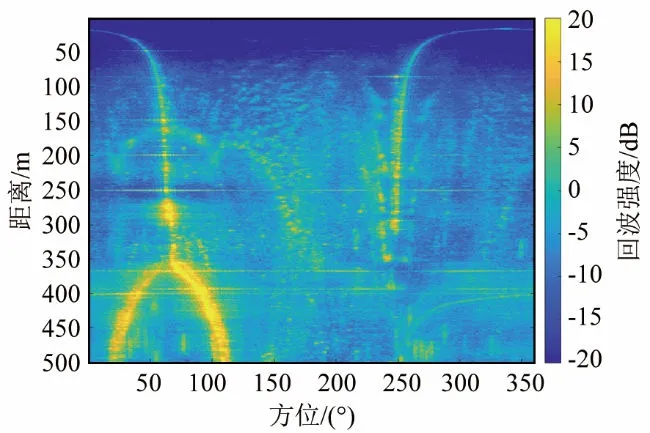
图3 单帧声呐图像Fig.3 A single frame of sonar image

图4 空时归一化处理后的单帧声呐图像Fig.4 A single frame of sonar image after normalization processing of space-time background
为了更直观地考察空时背景归一化的处理性能,图5给出处理前后背景数据的统计分布。可以发现经归一化处理后,背景强度的均值收敛到0附近,方差明显减小,即背景得到有效抑制,且近似符合高斯分布。

图5 声呐图像背景数据的统计分布Fig.5 Statistical distribution of background data on the sonar image
3.2 Radon-CFAR检测性能
图6是水下目标相对声呐由远及近沿直线运动的声呐历程累积图像,共累积 10帧图像,它的最左侧代表最新接收的回波数据,其中原始声呐图像和空时归一化处理后的图像如图 3、4中所示。声呐图像中共出现两个目标,强回波目标在一个历程中的局部信混比(目标回波的强度与参考单元的平均强度之差)为 10.7 dB,弱回波目标在一个历程中的局部信混比为6.2 dB,且部分回波点的信混比强度值低至 3 dB,低于 CFAR的检测门限。经Radon-CFAR检测后的结果如图7所示,可以清晰在图上看到两个目标的运动轨迹,通过检测短时运动轨迹实现弱回波目标的检测。强回波目标位于190°方位上,在一个历程周期中从相对声呐88 m处运动到78 m处。弱回波目标位于308°方位上,在一个历程周期中从相对声呐 102 m处运动到 92 m处。图6中220°方位280 m距离处存在一条由不明干扰物散射产生的较粗的亮斜线,将它变换到Radon域后经CFAR检测,由于局部背景能量较高使得检测门限提高,因此无法通过检测器,在图 7的检测结果中已经被滤除。
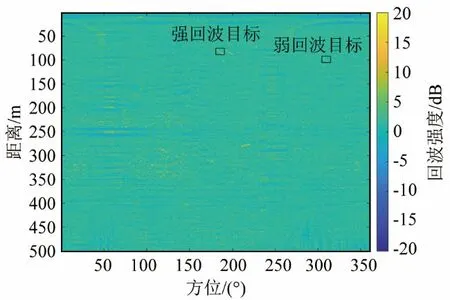
图6 目标的声呐历程累积图像Fig.6 Sonar history accumulative image of target
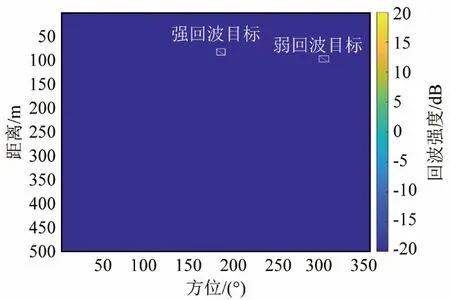
图7 声呐历程累积图像的检测结果Fig.7 Detection results of sonar history accumulative image of target
4 结 论
本文采用了空时背景归一化处理技术抑制了声呐图像中静态混响和突发性噪声等强回波的干扰,经处理后,背景平稳性显著改善,目标回波以相对信噪比的形式显示,有利于Radon变换能量累积。然后通过检测目标的短时运动轨迹实现目标检测,采用Radon-CFAR检测提取声呐历程累积图像中弱回波目标轨迹。
本文通过检测声呐历程累积图像中的短时线性运动轨迹,克服了单帧回波数据检测算法容易丢失弱目标的缺陷,对主动声呐的自动检测具有参考意义。后续将进一步研究多帧回波数据和单帧回波数据组合检测技术。
