A capture probability analytic model for the electromagnetic launched anti-torpedo torpedo
2022-03-10BoqiWuXiocunGunShohuGunJingbinShi
Bo-qi Wu , Xio-cun Gun , Sho-hu Gun , Jing-bin Shi
a National Key Laboratory of Science and Technology on Vessel Integrated Power System, Naval University of Engineering, Wuhan, 430033, China
b Jiangsu Automation Research Institute Lianyungang, 222006, China
Keywords:Electromagnetic launch Anti-torpedo torpedo Analytic model Dispersion variance Integral boundary
ABSTRACTWith the unique characteristics, electromagnetic launch technology is applicable to launch shipborne anti-torpedo torpedo(ATT).This paper aims to establish an analytic model to pre-evaluate the capture probability of the electromagnetic launched ATT.The mathematics model of the multi-stage coilgun and the trajectory of the ATT is established for analysis.The influence factors of the capture probability are analyzed respectively, including the entry point dispersion of the ATT and the position dispersion of the incoming torpedo.Adopting the advanced angle interception mode, the ATT search model is obtained according to the positional relationship,and the course error is synthetically calculated according to the differentiation of implicit function.A geometric method to calculate the integral boundaries of the probability density function is proposed, based on the relative motion of the ATT and the incoming target.To verify the proposed integral model, the digital simulation and comparison is conducted.The results reveal that the variation trends and the calculation value of the proposed analytic model are coincident with the statistic results from Monte Carlo method.And implications of the results regarding the analytic model are discussed.
1.Introduction
Storing the electric energy from the platform in the power supply, the EML technology, as a kind of new launch technology,converts the electric energy into the kinetic energy of the launched projectile[1].Different from the traditional methods of launch,EML has the characteristics of a high energy conversion efficiency and adjustability,and EML will not generate impurities such as after jet to the platform during emission[2].Inductive coil launch is one of the branches of EML methods.The coilgun has the advantages of modularization and being cuttable[3].A typical multistage coilgun is composed of multistage inductive coil circuits, gun body, and supporting follow-up equipment, etc.Each coil circuit is powered by an independent power supply [4].The principle of inductive coilgun is similar to the linear motor.Each stage discharges orderly and the armature will generate an inductive ring current in the changing magnetic field.The produced Lorentz force propels the projectile till to the muzzle [5].
Based on the advantages,the electromagnetic inductive coilgun can be applied to launch the shipborne ATT to expand the defense range and improve the defense capability of the platform against incoming torpedoes [6].Capture probability is an important index to evaluate a weapon system[7].The common calculation methods include the Monte Carlo method and the analytic calculation method.The Monte Carlo method is a statistical method based on simulation results or experiment data.The more times the simulation experiment repeats,the closer the result is to the true value of the capture probability [8].However, result is affected by the simulation times and it requires a large amount of simulation calculation.Thus the results are used to analyze in retrospect generally [9,10].The analytical calculation method can directly calculate the capture probability by establishing a mathematical analytic model,and the results can be calculated in advance when the combat background, equipment performance index, and battlefield situation are defined, which is applicable to the evaluation and decision of weapon operation [11].
No study to date has investigate the analytic model of the electromagnetic launched ATT.Analytic model studies of the torpedo weapon capture probability,according to the types of ATT can be divided into the rocket-assisted, acoustic homing, and wake homing torpedo,etc.The research focused on solving the problem of target capture conditions and the establishment of capture probability density function[12,13].Established capture probability analytic model for an advanced point and current point launching mode respectively,and an artificial scatter method is proposed,but the dynamic position change between the torpedo and the target is not considered [14,15].Based on the torpedo underwater search process [16], proposed a quadruple integral probability analytic model with the conventional launch method.For the acoustic homing torpedo, using a one-time turning-angle attack mode, the motion error and angle error can be converted to the torpedo course, and an analytic model is established [17].In the integral probability analytic models,the dichotomy method is often applied to calculate the integral boundaries, however the calculation is complicated and difficult to get an accurate integral boundary[18].
To launch ATT,an EML coilgun system should consist of torpedo detection sonar,navigation equipment,fire control device,and the coilgun.The system composition and the arrangement of this study are shown in Fig.1.The platform detects the incoming torpedo at pointand launches ATT after response time.The EML ATT starts to search for the incoming torpedo in advanced angle mode after entering the water.The launching position of the platform is defined as the origin of coordinates, and the course of the platform is the positive direction of theaxis.The distance between the torpedo and the platform is,and the bearing of the target isat the moment.Assuming the torpedo speed isand the course isrelative to the current, which can be obtained by the sensors.ATT entry into the water at pointafter flight time,and turns to the underwater searching section.ATT searches for the target at speed of, and the heading ofbased on the shooting parameters command.To take full advantage of the range extension effect of the EML, the launcher azimuth should be the same as the search heading, and the launcher should be at the maximum horizontal range.From the combat process, it can be informed that the capture probability of ATT is affected by the detection accuracy of the sonar, accuracy of the launcher, the accuracy of the fire control system, and the accuracy of the ATT’s navigation accuracy,etc.And all the reasons are reflected in the position dispersion of the incoming torpedo, the entry point dispersion, and tracking performance of the ATT.
This paper aims to establish the analytic model of EML ATT capture probability.The main influence factors of ATT capture probability are analyzed.The entry point dispersion of ATT is derived, by calculating the dispersion variance with a coordinate transform.The position dispersion variance of the incoming target is calculated according to the platform detection error.According to the position of torpedo and platform in advanced angle interception mode, the search model is given.And the course error is calculated according to the differentiation of implicit function on basis of the search model.The integral boundaries of the analytic model, are calculated with a proposed geometric method.By comparing the calculation results of the analytic model with the Monte Carlo simulation,the validity of the model is illustrated.The proposed analytic model will help in the pre-evaluate the EML ATT capture probability and adjust the ATT shooting parameters in real time to improve the survival probability of the platform.
2.Mathematical model
2.1.Multistage induction coilgun launching model
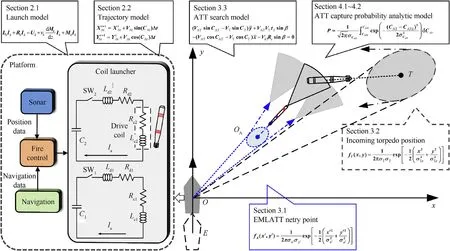
Fig.1.Functional block diagram of EM coil ATT system.
The induction coilgun is a special linear motor essentially with ATT as the armature.Multistage induction coilgun is composed of gun body,power supply,drive coils and control circuits.When the power supply discharges,the drive coil instantaneous flow through large current, and mutation of current generates a changing magnetic field.The armature in the magnetic field induces eddy current,and the armature with induced eddy current is affected by Lorentz force [1].Under the force, the armature is accelerated to muzzle direction.In multistage drive coils, the armature accelerated constantly, till out of the tube [2].The distribution of the induced current in the armature along the axial direction of the launcher is not uniform.The armature is divided intopieces along the axial direction.Whenis big enough, the induced current distribution in each section can be considered to be uniform.The launching mathematical model of multistage coilgun consists of the circuit equation of coil and armature and the motion equation of armature, and the equivalent circuit of the coilgun is shown as Fig.2.
The circuit equation of theth stage synchronous induction coilgun can be described as

The meaning of each matrix and variable is given.
L=diag(L+L,L,…,L);Lis the circuit self-inductance of theth coil; Lis the self-inductance of theth coil; Lis the self-induction of the armature of theth piece,= 1,2,…n;
R=diag(R+R,R,…,R);Ris the circuit resistance of theth coil;Ris theth coil resistance;Ris the resistance of the armature of theth piece,= 1,2,…n;
I=[I,I,…,I];Iis the coil current of theth coil;Iis the current in the armature of theth piece;


Mis the mutual inductance between theth coil and theth piece of armature; dM/dis the mutual inductance gradient between theth coil and theth piece,= 1,2,…n; n is the equivalent number of armature pieces.
During the launch process, ATT motion equation can be expressed as



where vrepresents the muzzle velocity of the armature.Under certain environmental conditions, the ATT outer trajectory is only decided by v.The ATT horizontal launch range can be changed by adjusting the launching pitch angle
Thus, when the coilgun launches ATT, the launching range is controlled jointly by the charging voltage and launching pitch angle.In the application, the charging voltage is maximized to increase the initial speed of the ATT by default, and to reduce the flight time in the air.The voltage can be controlled more precisely than the launching pitch angle.Thus the horizontal launching range of the ATT is mainly determined by θ.
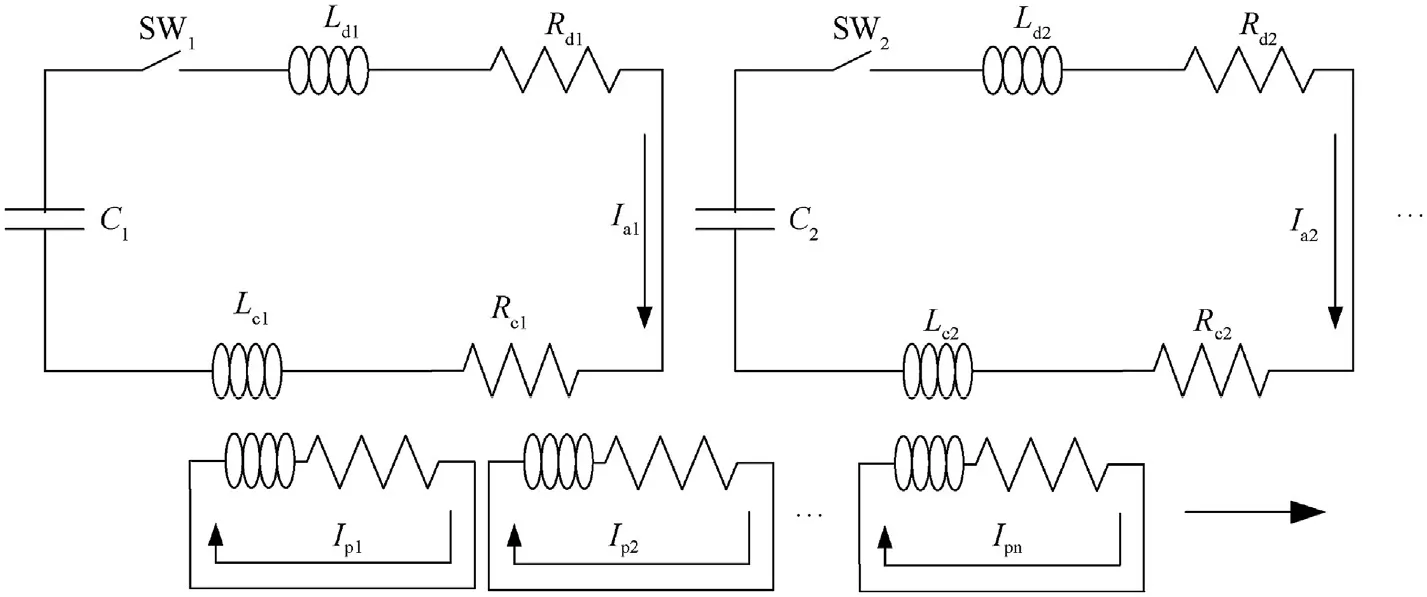
Fig.2.Equivalent circuit of the coilgun.
2.2.ATT trajectory
Considering the motion of ATT on the horizontal plane, the trajectory can be described as [4].


The motion of the ATT may be affected by the environment,and current is the main disturbance source to the underwater vehicle.However,the speed of the current is small compared to the ATT,and the current speed is compensated by the fire control device when calculating the ATT’s tracking parameters.Thus, the impact on the motion from the current is ignored in the analytic model.
ATT trajectory can be divided into search segment trajectory and pursuit trajectory [7].The formula can describe the trajectories of both stages, but for different segments, theis different.The major difference of the ATT trajectory under the three interception modes is the trajectory prior to capture the target,thus the key is to calculate the heading.
When the ATT is in the straight search segment underwater,is constant, and when ATT is turning a corner,is given [19].

Where ωis the angular velocity of rotation.
When the ATT pursuits the current point of the target, the heading is

3.Influence factors of ATT capture probability
3.1.Entry point of EML ATT
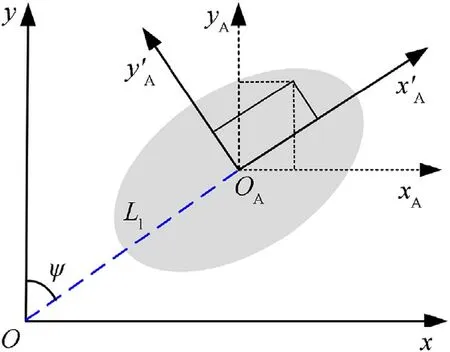
Fig.3.Dispersion of the entry position and coordinate transformation.
The application of EML technology to launch ATT can significantly improve the muzzle speed of ATT.Through the air flight segment, ATT can get close to the target quickly and the defense range is extended.The air horizontal range can be controlled by the power supply voltage and launching pitch angle.In the flight segment, without additional control, the placement accuracy is influenced by the wind.The speed and heading of the wind can be detected by the sensors, and the information is transferred to the fire control device.The wind can be compensated when solving the ballistic trajectory equation, to eliminate the error caused by the wind.Due to the launching process,the entry point is influenced by the air condition, servo control device and other random factors,and turns out to be dispersed.According to the central-limit theorem, the probability density of the horizontal launch range and cornering comply with the normal distribution [20].Taking the theoretical entry pointas the origin,and the theoretical launch direction as the’axis positive direction, a Cartesian coordinate system is established as shown in Fig.3.Thus the probability density function of ATT’s entry point can be expressed as

where σand σrepresent the dispersion mean square error of ATT entry points in’and’direction respectively.
Assume the launch azimuth as ψ, and the range aswith the maximum energy.In the launch coordinate system,the entry point dispersion error from the centercan be expressed as
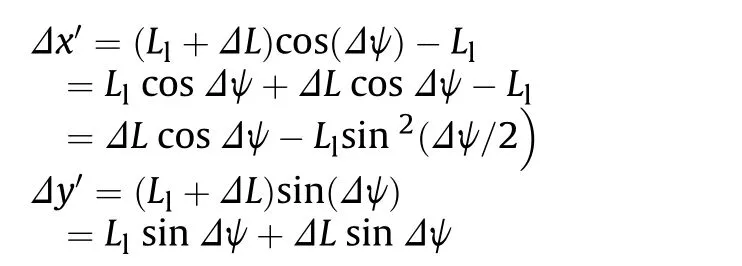
where Δand Δψ is the small error of the launch range and the azimuth angle respectively.As Δand Δψ are small, the second order small variate is ignored, and the error in the launch coordinate system is given as

From Eq.(6), it can be seen that the entry point dispersion of EML ATT is mainly caused by launch range error and azimuth error.σand σare determined by the performance of the coilgun and servo device.According to the distribution law of random variate,the dispersion variance of the entry point is
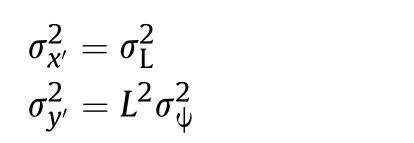
By rotation transform the coordinate, the entry point error in the geodetic coordinate system can be given as
Using Eq.(6), the entry point error can be expressed as

Therefore, it can be derived that the dispersion variance of the entry point is

3.2.Position of the incoming torpedo
The platform calculates launch parameters according to the position of the detected attacking target.The detection errors of the target are the main influence factors of the position error.The target position obeys a normal distribution, and the probability density function can be expressed as

where σand σrepresent the position mean square error alongandaxis respectively.The ideal target position is described byanddetected by the platform.

where’is the abscissa, and’is the ordinate.
As informed in Eq.(9), the target position is derived by the detection.Considering the detection error, the target position can be expressed as

Δand Δrepresent the error along the-axis and-axis in the geodetic coordinate system respectively.Ignoring the second-order small variate in Eq.(10), it is derived

Therefore,the target dispersion error can be obtained with Eqs.(9) and (11).

It can be seen from Eq.(12), the dispersion error of the target point is mainly affected by the detection accuracy of the sonar.According to the distribution law of random variate,the dispersion variance of target position is

where σis the detection range variance of the platform,and σis the bearing variance.
3.3.Search model of ATT
Affected by the motion control system performance, standardization level of the ATT,and other factors,the errors between actual track speed and the nominal speed exits.The speed variance of the ATT is mainly determined by its own factors.
After attitude adjustment when diving into the water,ATT starts the underwater search segment.The position of its head extending a forward distancecan be expressed as

whereis the underwater course.Generally, there exits= 0.7, andis the self-guided distance of the ATT.(,)represents the entry position,which can be expressed as

The position of the incoming torpedo can be expressed as

where=+,andrepresents flight time in the air,represents the tracking time underwater.(,) represents the target position at the launch moment.
Using Eqs.(14) and(15)to eliminate,the geometric model of the ATT capturing attacking target is derived.

4.Analytic model of the ATT capture probability
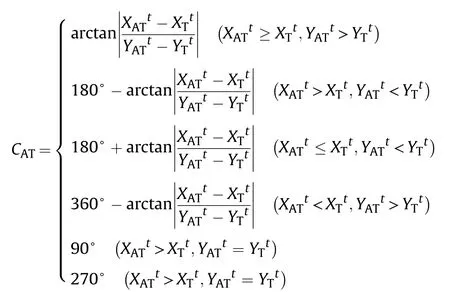
According to the previous analysis,the main influence factors of ATT capture probability contain the ATT entry position dispersion,target position dispersion, and ATT tracking speed and heading deviation.ATT entry position dispersion and target position dispersion can be converted to the heading according to the geometric model of capture.Regard the heading as the variate, the probability of ATT capturing target can be expressed as

To calculate the capture probability through the model, according to Eq.(17), the expected heading, mean square error σ,the lower and upper boundary of integralandneed to be calculated first.
4.1.Expectation and variance of the course
Regarding the variates in Eq.(16) with no errors, the expected headingcan be calculated directly according to the search model.
Consider the influences of the ATT’s track speed,entry position dispersion, position dispersion, and motion error of the target on the ATT heading comprehensively.According to Eq.(16), let=(,,,,,,,), thus the variance of the heading can be calculated[16,17].

In Eq.(18),σand σare affected by the observation error and the calculation error of the fire control system.σand σand are affected by the launch energy control, servo device, the ATT aerodynamic characteristics, and other factors.These factors can be obtained from the corresponding equipment performance indicators.Assume functionas the left side of Eq.(16)

Thus the partial derivatives in Eq.(18) can be calculated

4.2.Relative heading boundaries
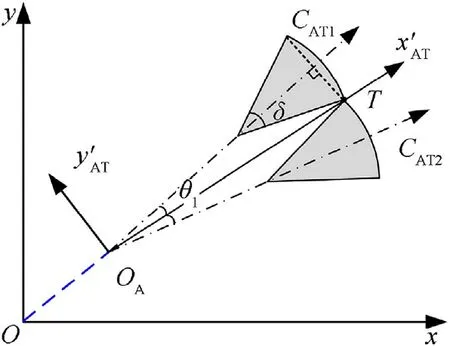
Fig.4.Relative heading boundaries for ATT to capture the target.

According to the geometric relationship,θ is given as

where δ is the central angle of the homing sector.
andcan be calculated respectively according to θ,and the relative heading range of ATT to capture the incoming torpedo’∈[,].
The ATT searches target at the maximum speedby default.Takeas the center and || as the radius, and a virtual navigation circle of ATT is built,as shown in Fig.5.⊙can be described as



is the slope of, which satisfies= tan(π2-).

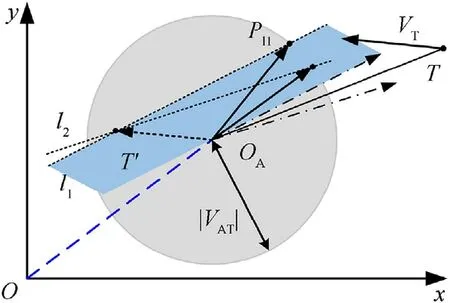
Fig.5.Search heading boundaries with ATT maximum speed.
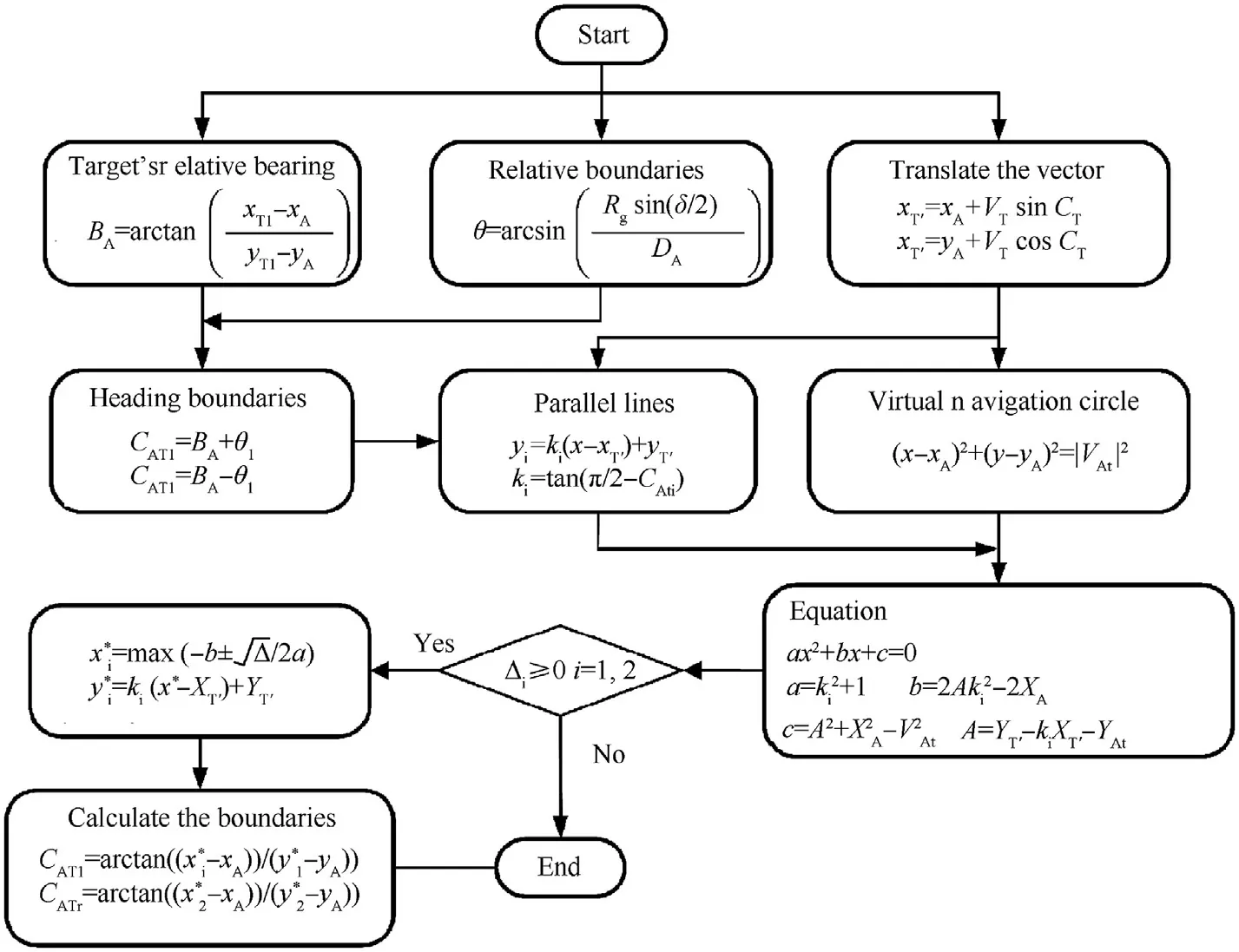
Fig.6.ATT search boundaries calculation flow.
Fig.7.Capture probability changes with the initial distance and the bearing of the target.

ATT search heading boundaries can be calculated with the process shown in Fig.6.
5.Numerical simulation and results
To verify the analytic model, the typical anti-torpedo combat scenario is set.The calculation results of the model are investigated,and the variation trend and influence factors of capture probability are analyzed.The results are also compared with the statistical results of the Monte Carlo method, to illustrate the validity of the model.In the Monte Carlo simulation, the ATT and the incoming torpedo adopt the advanced angle method, and the underwater trajectory mainly refers to the straight search trajectory.The simulation parameter setting mainly includes three parts:incoming torpedo, launching platform, and ATT, as shown in Table 1.

Table 1Simulation parameter settings.
5.1.Analytic model calculation results
In the simulation,the advanced angle is influenced by the speed of the platform, and the search model of the ATT is shown as Eq.(16).
Fig.8.Analytic model results and simulation results are compared with each other in different situations.
The capture probability calculated by the analytic model is shown in Fig.7.Each curve represents the results of the target of a certain attacking bearing from 30to 150,with an interval of 30.The result of each curve ranges from 0.85 to 0.46,0.43,0.41,0.39,0.38, respectively.
It is well known that the result curves vary with the initial target distance and bearing regularly and this is reflected in the data.The capture probability decreases when the target distance increases.As shown in detail,when the initial target distance is 3 km,the ATT capture probability reaches about 0.85 at any attacked directions.And the capture probability decreases to less than 0.5 when the initial distance increases to 8 km.At the same time, the capture probability varies with the target attacking directions.The probability to capture the target from the bow and the stern is larger than the target from the board.As shown in detail, at any distance, the capture probability is the largest when the target bearing is 30,and target with a 150bearing is rather large.While the probability comes to the least with the bearing of 90.With a same distance,the maximum difference of the capture probability to the target with a 30and 90bearing, reaches 0.85.
5.2.Comparison with the Monte Carlo simulation
The simulation is carried out using the Monte Carlo method based on settings in Table 1.The target bearing was also set at 30-150, with an interval of 30, and a distance of 3 km-8 km,with an interval of 0.1 km respectively.And the simulation was repeated 2000 times under each situation to calculate the capture probability.The results are compared with the analytic model method,as shown in Fig.8.The capture probability deviation of the two methods is summarized, as shown in Table 2.
As the deviation between the simulation and calculation results shown, in different situations, the variation trends of the capture probability obtained by the two methods are consistent, and it is clear that the value has a small deviation.The curve of the analytic model is smoother.As shown in detail, to the target from any attacking direction, the Monte Carlo method result is smaller than the analytic model calculation result when 3 km<<4 km.While the results have no obvious numerical value regularity when4 km<<8 km.The curves of the analytic model calculation results are continuously differentiable, while the curves of the simulation results are not.Saltuses exit in small ranges,such as the situation of(7.6 km,30),(7.5 km,60),and(5.5 km,120).As shown in Table 2,the maximum deviation of all situations was 10.7% from the situation of (5.2 km,120).The results account for about 87.8% with a deviation of less than 5%, while the results with a deviation of 5%<Δ≤10.7%account for about 12.2%,mostly from the situations of(= 4.7 km-5.4 km,= 90) and (> 7 km,= 90).
Table 2Error between analytic model and Monte Carlo method.
6.Discussion

The comparison shows that the calculation results of the analytic model is consistent with the simulation results of the Monte Carlo method.It is important to note the deviation of the two results.Since no specific quantitative error of the target motion is analyzed when establishing the analytic mode, only the reference values of σand σare given.And due to the ignored second-order small quantities in the calculation of ATT entry position dispersion and the incoming torpedo position dispersion, minor deviation could be induced.Theoretically, the capture probability should change continuously under the continuously changed situation,however, the simulation results of the Monte Carlo method are limited by the simulation times and have a certain random deviation,resulting in the uneven curves.Thus the results comparison of the two methods is also affected.Monte Carlo method is adopted in previous studies [21,22,24], but there is no available data as a contrast, for the new electromagnetic launch method.

7.Conclusions
The mathematical model of the multistage coilgun and the ATT trajectory in advanced angle interception mode is established respectively.By analyzing the distribution of ATT entry position and the distribution of incoming torpedo positions, the variances are mainly affected by the detection capabilities of the platform and EML control accuracy.For the ATT with advanced angle search method, and a capture model is established.The expected search course of ATT is calculated, and its course variance is calculated synthetically according to the differentiation of implicit function.The search course boundaries are determined by a relative motion geometric method based one the maximum speed of ATT.According to the proposed analytic model, the capture probability is calculated and compared with the simulation results of the Monte Carlo method.The results show that.
a) The calculation results of the analytic model vary with the target distance and bearing, and the trend is consistent with the regularity of the ATT.The results variation trend is due to a combination of the factors: the error of the heading σand the boundariesandof the analytic model,which vary with the target distance and bearings.
b) The capture probability obtained from the analytic model and Monte Carlo are consistent.The results with a deviation of less than 5% account for about 87.8%.The reason of the deviation is due to the simplification in the modelling and the random deviation of the Monte Carlo method.
c) The results of the proposed analytic model are smooth and definite,making the model reasonable to pre-estimate and realtime evaluate the capture probability of the EML ATT in the changing combat situation, and support the combat decisionmaking and optimal weapon parameters.
There are no conflicts of interest with other reports or authors.
The authors would like to acknowledge National Natural Science Foundation of China (Grant No.51777212).
杂志排行

Defence Technology的其它文章
- A fast and accurate model for the creation of explosion fragments with improved fragment shape and dimensions
- External blast load factors for dome structures based on reliability
- A comparative study of four nonlinear dynamic methods and their applications in classification of ship-radiated noise
- Ignition of nanothermites by a laser diode pulse
- Improving the energy release characteristics of PTFE/Al by doping magnesium hydride
- Buckling analysis of shear deformable composite conical shells reinforced by CNTs subjected to combined loading on the two-parameter elastic foundation