基于物联网与GIS的城市地下空间内涝监测预警系统研究
2022-03-09张晓彬赵巍平曹伟伟黄俊博李馨茹
张晓彬,赵巍平,曹伟伟,黄俊博 ,李馨茹
(1.唐山工业职业技术学院,河北 唐山 063299;2.唐山市滨海软土工程技术研究中心,河北 唐山 063299)
当今,城市地下空间的内涝监测与报警系统大多数选用传统水位传感器的监测方法,对数据不能实时进行监测和预警,一般都需借助人工来实现数据的记录、管理和分析,人工工作量巨大[1-3]。水位时刻在变化,极容易出现监测不及时,导致数据错误,从而引发更大的内涝风险及失控。为了提高水位测量的精确性,该系统是采用分布在城市地下空间内的电极式液位传感器、光电式水位传感器和超声波液位传感器对城市地下空间的水位进行实施的监测,多种传感器并用,提高精度,并将监测的数据利用物联网与GIS实时传输至控制端[4-6],预防城市地下空间内涝灾害的发生。超声波传感器具有频率高、波长短、绕射现象小和方向性好等特点;光电式水位传感器构造简单、高精度、机械运动部件、可靠性高、耐腐蚀、耗电少、体积小等特点;电极式液位传感器具有响应时间短,液位精度高,可多方位安装等特点[7]。因此设计一种智能化、低成本、可靠性高、抗恶劣工作环境的多参数的城市地下空间内涝监测报警系统,对加强对城市地下空间的内涝防范安全监测具有重要意义[8-10]。本文基于物联网与GIS技术,选用电极式液位传感器、光电式水位传感器和超声波液位传感器相结合,对城市地下空间内涝灾害进行实时监测预警,并进行风险分析评估,从城市地下空间安全统筹考虑,统一规划部署,建立较为完善的监测系统。
1 需求分析
2021年7 月下旬,河南省郑州市遭遇特大暴雨袭击,郑州地铁5号线列车在海滩寺街站和沙口路站隧道列车停运,暴雨雨水倒灌入地下隧道和5号线列车内,造成重大人员伤亡和财产损失,因此建立有用的城市地下空间内涝监测预警系统显得尤为必要。建设在城市地下空间内的电极式液位传感器、光电式水位传感器和超声波液位传感器对城市地下空间的水位进行实施的监测,并及时报警,将危险源消除在萌芽中,保障城市地下空间的安全,进而保障人民的生命财产安全。
物联网是一种能在任何时间、任何地点实现物体之间相互联系的动态网络,其实质是在互联网的基础上,利用传感设备(如射频识别、传感器、定位系统等)、智能处理、无线通信等技术实现相关物品的识别控制和网络化互联与共享。GIS是一门综合性学科,融合了地理学、地图学、遥感以及计算机,已经在不同的领域广泛应用,专门用于信息采集、信息储存、信息管理、信息分析和信息空间表达的系统。文献[11-12]通过物联网与GIS进行综合处理和分析,利用物联网和空间信息可视化技术进行三维模型展示,以及电极式液位传感器、光电式水位传感器和超声波液位传感器模块发出的信息,实现城市地下空间内涝灾害的监测与预警。
2 系统设计
2.1 整体架构
基于物联网与GIS 的城市地下空间内涝监测报警系统,是以城市地下空间为中心,在各个地下空间建立内涝监测报警系统。根据物联网理论和物联网原理的工作流程,城市地下空间内涝监测预警系统在设计上主要以感知、传输、分析、控制等4个层级组成。感知层主要负责采集传感器监测数据;传输层主要负责数据的传输;分析层主要负责监测数据的分析以及评估;控制层是整个系统的核心,主要负责各个层次以及接口之间的管理、连接、运维、计算和智能处理,为整套监测报警系统提供全面的支撑。由散布在城市地下空间内的多个电极式液位传感器、光电式水位传感器和超声波液位传感器组成的感知层,经检测得到的数据经传输层传输到分析层,再由分析层对监测数据进行分析处理。当检测数据高于给系统设置的阈值时产生报警信号,并将报警信号传送至控制中心,由控制中心对报警信息进行再次处理,进而达到对城市地下空间内涝情况的实时数据监控与报警。
1)采集感知系统。采集端感知系统主要负责数据的采集工作,是整个物联网系统的末端。主要包括散布在城市地下空间内的多个电极式液位传感器、光电式水位传感器和超声波液位传感器组成的感知系统,不间断对城市地下空间的水位进行监测。
2)网络传输系统。网络数据传输系统是整个物联网系统的承载网络,主要是将感知系统采集的数据传输至分析系统,实现数据的交会,作为连接采集感知系统盒分析系统的链接网络,是整个物联网系统中最重要的保障支撑系统。
3)数据分析系统。数据分析系统是将采集端采集的城市地下空间内涝水位数据进行处理分析,识别报警信号,发送报警信息,并将报警信息传输至应用系统,进而实现对城市地下空间内涝的监测与预警。
4)控制中心系统。控制中心主要包括与采集感知系统、网络传输系统和数据分析系统形成闭环管理系统,负责各个层次以及接口之间的管理、连接、运维、计算和智能处理,为城市地下空间安全管理提供强有力的支持。
依照GIS技术将城市地下空间建立三维空间模型,并采用空间模型分析方法,精准定位,迅速找出并评估内涝发生位置,进行报警,从而降低危害。
2.2 总体流程
系统首先对城市地下空间进行内涝风险评估,确定各个城市地下空间的风险等级,从而对不同风险等级的城市地下空间进行分级监测,并在此基础上进行各类传感器网络的优化布设。监测方式主要利用散布在城市地下空间内的多个电极式液位传感器、光电式水位传感器和超声波液位传感器相结合组成的传感器网络对水位进行实时监测。依据监测传输进来的数据,进行分析处理并得到结果,从而对城市地下空间发生内涝灾害的风险进行划分,并通过计算结果和空间位置迅速找出发生内涝的地点,发出报警信号。内涝报警信号主要依靠节点水位、节点水位变化率、校准参数等进行判断,内涝水位节点传感器报警信号具体发生流程图如图1所示。
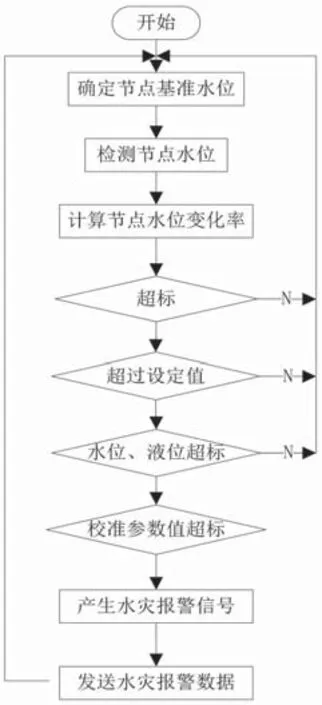
图1 水灾节点传感器报警信号具体发出流程
当某一传感器接收到报警信号,并将报警信号传输到数据分析系统,并检查相邻点位传感器的数据,进行比较,若该异常传感器相邻检测参数为正常值,经数据分析系统处理,不发出报警信号。若传感器有两个或者两个以上发出水灾报警信号,则数据分析系统立即发出报警,并将数据传输至控制中心。内涝系统报警主控程序流程如图2所示。
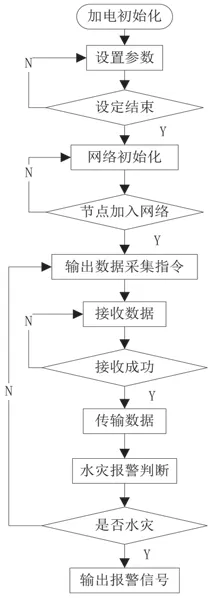
图2 水灾系统报警主控程序流程
2.3 方法比较
采用基于物联网与GIS的城市地下空间内涝监测报警系统,与广泛使用的传统水位传感器人工监测城市地下空间相比较,在监测数据上,从单一种类的水位传感器扩充到多类型水位传感器组网共同测量,以应对恶劣环境数据的监测,检查范围更广、自组织能力以及抗毁性更高;本系统的数据处理能力、精度等方面均优于水位传感器水灾监测系统。基于物联网与GIS的城市地下空间内涝监测报警系统在传输距离略逊于传统方法,其余参数均优于传统监测方法。两种方法(系统)的性能比较详见表1。

表1 传统方法与本系统的性能比较
2.4 系统构成
基于物联网与GIS的城市地下空间内涝监测报警系统的监测网络结构如图3所示。此系统由控制中心系统、采集感知系统、网络传输系统、数据分析系统以及分布在城市地下空间内部的传感器组成。路由节点可以实现数据传输,控制中心可以实现数据的处理分析、识别报警信号、发送报警信息,以及实现对于城市地下空间内涝数据的监测、监测数据的转换、数据传输、内涝报警处理等。
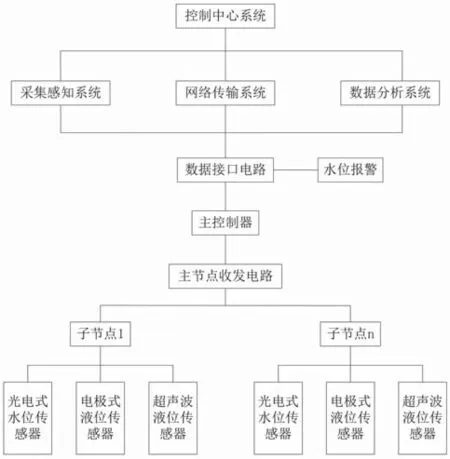
图3 城市地下空间内涝监测报警系统的网络结构图
系统中传感器节点与相邻节点之间的距离为0.1m,呈网格状分布,安装于城市地下空间的两侧。控制中心的处理器及传感器均采用高性能低功率控制芯片,每个节点为固定IP。
2.5 传感器选择
城市地下空间的内涝监测功能由液位传感器、光电式水位传感器和超声波液位传感器实现,工作温度-25~105℃,寿命50 000h,测量最高精度可以控制在±1mm以内。当传感器超过和低于临界液位的信号输出电压、真值、总电流及功率消耗详见表2。
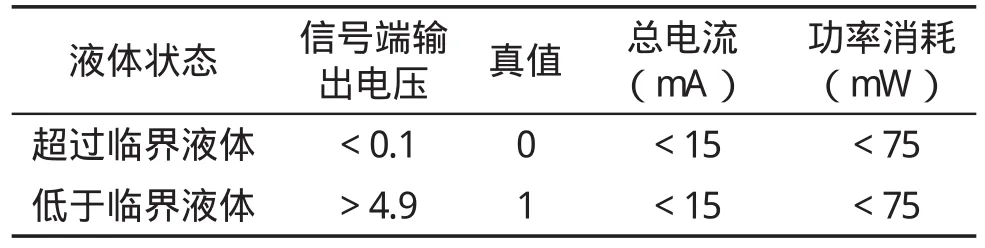
表2 工作参数
2.6 传感器节点设计
图4为传感器节点电路分布示意图。若传感器产生报警信号,控制中心会分别对水位、温度、湿度等参数进行监测并记录在数据中心,系统会按照一定的算法算出监测参数的平均值,并计算出参数变化的情况;与设定的阈值进行比较,若平均值超出设定的阀值或单位时间内参数起伏值超过标准值,将发出水灾报警信号。经一系列程序处理后的水灾报警信号,数据被传送到控制中心。

图4 传感器节点电路分布示意图
2.7 功能模块
为了合理地利用和开发,并根据系统功能的需要以及设计原则,控制中心主要分为数据采集、数据分析、风险识别、监测报警、综合统计、数据管理等6个模块。如图5所示。
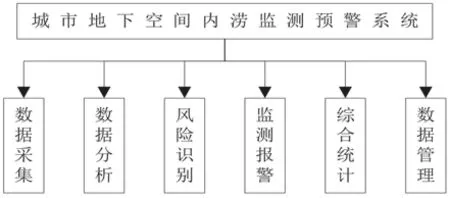
图5 内涝监测预警系统
3 系统实现
应用层系统是整套系统的核心功能,具体如图6,也是体现系统价值的地方。共分为三个层级,依次为数据采集层、数据交互层和数据扩展层。数据采集层通过现场检测设备现场采集预警信号传输到终端,并经过数据处理形成数据报表。一方面数据采集终端收集的数据传输给云数据服务器,并指导数据传输层测BIM 建模,另一方面可以进行监测数据的协同管理。数据交互层可以实现将云端服务器传输给远程交互平台,并实现检测数据的协同管理。数据扩展层,分为GIS场景展示、BIM建模融合分析、移动端综合展示及施工管理平台整理四部分,可以实现四个方面的屏显示融合展示。
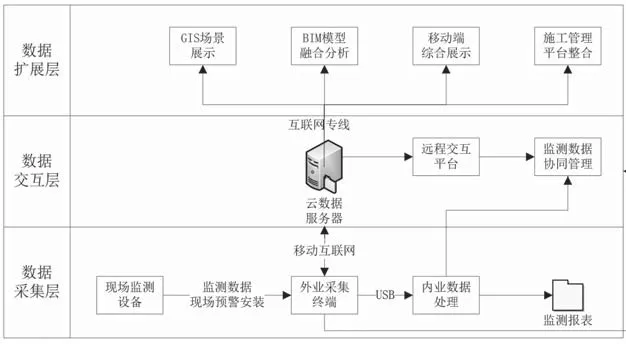
图6 应用层系统层
4 结论
1)将物联网与GIS技术相结合,可以实现对城市地下空间内涝灾害的实时监测与报警。
2)该技术可以对已经发生的内涝灾害进行定位,或对即将发生内涝灾害位置进行预测。
3)该城市地下空间内涝监测报警系统,硬件结构简单,水位测量精确,运行稳定,功能可靠,误报率低,后续可以进一步系统优化与功能扩展,能够有效降低城市地下空间内涝灾害事故造成的经济损失,大幅度提升城市地下空间公共安全管理能力和应急处置能力。该系统具有很强的社会效益和经济效益。
