基于曲线反射面快速扫描光学延迟线设计
2022-03-07程爽李全勇蒋锐辛胤杰王奇书
程爽,李全勇,蒋锐,辛胤杰,王奇书
(长春理工大学 光电工程学院,长春 130022)
扫描光学延迟装置是可精确控制系统中光脉冲之间时间差值的一种技术手段,是时间分辨光学系统的关键技术,常应用于光学相干层析成像(OCT)技术[1]、光泵浦-探测技术[2]和太赫兹时域光谱(THz-TDS)技术[3]中,通过改变系统相干光脉冲之间的光程进行太赫兹脉冲的探测。
最常用的光学延迟线是由步进驱动电机和平面光学反射镜组构成,利用步进驱动电机操控位移平台进行来回往复运动,此类光学延迟线具有较长延迟且平稳度良好的优点,但由于存在机械惯性导致不能进行快速扫描运动[4]。其他类型的光学延迟线,如棱镜或对式反射镜旋转延迟线[5-6]、基于全反射透镜构成的光学延迟线[7]、旋转阵列式反射镜光学延迟线[8]、基圆渐开线反射面式延迟线[9-10]等不断被发明,多用于OCT成像系统和时间延迟范围要求不大的光学分辨系统中。为了让延迟线有更好的应用,研制了相对上述内容可提供较长时间的延迟线,如Geun Ju Kim等人[11-12]研制了双爪和六爪式基圆渐开线反射面构成的快速旋转光学延迟线,应用在了实时显示THz-TDS系统当中,实现了140 ps的扫描延迟时间窗口;王月宾等人[13]利用回转螺旋面反射镜实现了周期性反射式扫描光学延迟线,延迟距离相比传统抛物线型回转螺旋面反射镜增大了一倍,可以供约50 ps的时间延迟;刘洋等人[14]利用渐开线原理和反射镜组成延迟装置,此装置具有较稳定的重复频率,可实现约133 ps的延迟时间。
本文基于上述延迟线的优点,设计了曲面反射面快速扫描光学延迟线,该装置由驱动电机和曲线反射面构成,有4个曲线面,通过LIGHT‐OOLS进行光学仿真体现工作特性,结果表明在空间上可以有效地分开光线,且有较好的重复性,计算得知可提供更大的延迟时间,适用于快速探测太赫兹信号。
1 基本原理
1.1 太赫兹时域光谱系统工作原理
太赫兹时域光谱系统(THz-TDS)是基于太赫兹(THz)技术研发,在0.1~10 THz进行光谱分析的相干探测系统,可以获得太赫兹脉冲的相位信息和振幅信息,通过对时域波形进行Fourier变换得到频域波形,可获得样品的折射率和吸收系数、透射率等光学参数[15]。目前在医疗检查、无损检测和国防安检等领域都有着广泛的应用。
典型的THz-TDS系统主要由超快脉冲激光器、太赫兹信号激发装置、太赫兹信号探测装置、时间延迟控制系统、信号分析处理系统五部分组成。基本原理[16]是:超快脉冲激光器输出一束飞秒激光脉冲,经过分束器后光束分为两路(根据实际需求选择合适的分光比),光功率较强的一路光作为泵浦脉冲,另一路光功率较弱的光作为探测脉冲。泵浦脉冲分别经过准直透镜、时间延迟控制系统和光纤色散补偿模块,最后由聚焦透镜将全部光能量汇聚入太赫兹辐射源,经过光电的能量转换,太赫兹辐射源向自由空间辐射太赫兹电磁波,太赫兹信号通过样品,携带样品信息的太赫兹信号再进入太赫兹探测器,与此同时,探测脉冲经过一系列反射镜和光纤色散补偿模块,最后也由聚焦透镜聚焦到太赫兹探测器上,当探测脉冲和同时到达的太赫兹脉冲重合时,在偏置电场的作用下使得探测光的偏振状态发生改变,此现象可以反映出太赫兹电场的大小以及相应变化。经过调制的探测信号被送入锁相放大器,通过控制光学时间延迟系统,可以实现对太赫兹脉冲信号的等效时间采样,从而得出太赫兹电场的时域信号,对太赫兹电场的时域信号进行快速傅里叶变换即可得到太赫兹频域信号。原理如图1所示。

图1 THz-TDS系统工作原理
脉冲式太赫兹波的周期一般为ps量级,而一般的探测电子元器件,其响应时间往往为纳秒或亚纳秒,往往无法满足对太赫兹时域脉冲的实时测量,对于随时间变化的太赫兹电场信号进行数据采集,一般采用等效时间采样原理[17]进行处理,获取完整的太赫兹时域脉冲,基本原理如图2所示。

图2 等效时间采样原理图
由图2可知,THz-TDS系统中探测激光脉冲为飞秒脉冲序列,相对于太赫兹脉冲其持续时间非常小,此时需控制光学时间延迟装置,改变光束之间光程距离,把快速高频率信号转变为慢速低频率信号,这样可以在重复信号的每个周期或相隔几个周期取一样点,即在每个输入信号波形不同的位置上选取对应样点,对应取样点可以组成对应原信号周期的类似波形,即可获得等同于原信号的太赫兹波形。
1.2 曲线反射面延迟线工作原理
由等效时间采样原理可知,想要得到一个完整的太赫兹时域脉冲波形,需要改变取样冲击序列取样间隔中的时间延迟。这里通过光学延迟线的移动来调整太赫兹脉冲与探测脉冲的相对延迟,如图3所示。由飞秒激光分出的探测光束入射到可移动的两面互相垂直的平面反射镜,当反射镜移动距离ΔL时,相应光程差为2ΔL,相应延迟时间 Δt=2nΔL/c[18],其中,n为延迟线所处环境的折射率,c为光速。这里通过改变光学延迟线的位置就可以得到相应太赫兹脉冲不同位置的强度,从而可探测到整个太赫兹时域波形。

图3 时间延迟原理
如图4所示,基于曲线反射面的光学延迟线基本原理是在不同位置上使入射光线和出射光线平行,在空间上把光线有效地分开。光线沿着基圆1∶Ri的切线方向(平行于x轴)入射到第一个子叶片反射器,反射光线入射到第二个子叶片反射器后沿着基圆2:Ro的切线方向出射。

图4 曲线反射面延迟线原理图
可以看出曲线反射器时间延迟线具有两个子反射器,这两个子反射器由坐标(xi(θ),Ri)和(xo(θ),Ro)光反射点来进行定义,用反射点(xi(θ),Ri)定义反射入射光束的子叶片,用反射点(xo(θ),Ro)定义将光束发送出延迟线的子叶片。从原理图中可以看出,刀片相对于ox轴的倾斜角度为αi(θ)和αo(θ),为了使入射光束和出射光束遵循两条平行路径,必须要求对于θ取任何角度,两个叶片的倾斜角度都为αi(θ)-αo(θ)=π/2。
2 延迟线的数学分析及光学模拟
2.1 光学延迟线数学分析
为了具体分析,对曲线反射器进行数学模型分析,已知某点A(x,y)绕原点(0,0)顺时针旋转角度α得到点B(x′,y′),表示情况如下:

假设考虑夹角θ和θ+Δθ这两个值的叶片位置,对于叶片夹角θ,光反射点的位置由坐标(xi(θ),Ri)给出。叶片旋转Δδ后,该反射点将具有新的坐标(x1,y1),由下式给出:

此时新的反射点坐标为(x2,y2)=(xi(θ+Δθ),Ri),这时能够找到叶片相对于ox轴的倾斜度,即当Δθ→ 0时:

根据公式(3)分析可得到关于倾角的微分方程:

再根据两个光反射点的几何关系和三角恒等式得到倾斜角αo(θ)的正切公式:


值得注意的是,具有两个子叶片并提供入射光束和出射光束共线路径的旋转延迟线显示出线性延迟特性,其基于单个延迟线的计算方式,延迟时间如下:

其中,L(θ)是两个光反射点之间的距离。
求公式(6)的一阶导数,即取延迟时间相对于旋转角度导数,可表示光学延迟线的线性特性。
已知条件设置基圆1:Ri=12mm;基圆2:Ro=36mm和外圆Rdl=50mm,则初始角度为0°时,xi(0)=33.941mm,xo(0)=0mm。建立的曲线反射器延迟线如图5所示,曲线部分即为延迟线形状。

图5 延迟线二维形状示意图
2.2 经延迟线的光学模拟
为了更好地体现光学延迟线的工作原理,基于LIGHTOOLS软件进行了光线经曲线反射器延迟线的光学模拟。模拟时,光源设置束腰半径为0.5 mm的准直高斯光束,探测器尺寸设置为5 mm×5 mm,模拟追迹总光线为25 000条。如图6所示给出了光线经光学延迟线的传播路径图、光线质心及光斑变化。

图6 光学模拟及不同角度照度光斑变化
如图6(a)所示,可以看出设计延迟线基本符合工作原理。模拟结果显示出射光线在探测器上的光斑有明显变化,图6(b)为光源大小,图6(c)—图 6(f)为在不同旋转角度下,出射光线在探测器上形成的照度光斑。由图6(c)—图6(f)可以看出,在不同角度时,出射光线的照度光斑呈椭圆状,在ox方向上光斑基本无变形,但在oy方向上发生了明显变形。由变化情况可知曲线反射面在ox方向上相当于完美平面,不对光线产生影响;在oy方向上反射面相当于一个“凹透镜”,对光线有发散作用,且出射光线中心也发生变化,这是由于反射面拟合各点曲率半径不同。
如图7所示,为了减少延迟线反射面“凹透镜”作用,在出射光路处添加准直透镜和聚焦透镜对光路进行优化处理,减少发散效果的影响。

图7 透镜优化光路
根据延迟线的工作原理,准直透镜放在y轴正方向36 mm处,考虑到延迟线处于高速旋转下,需保证光学元件之间的距离,透镜放在z轴正方向55 mm处,为满足在旋转状态下都可以起到准直效果,经优化选定焦距为70 mm的平凸透镜;在准直透镜后放置一个聚焦透镜汇聚出射光线至探测器,经优化选定焦距为28 mm的平凸透镜。探测器检测的出射光线照度光斑形状和质心变化,如图8所示。
在模拟过程中,当旋转角度小于4°时,入射光束会被延迟线边缘切割,当旋转角度大于38°时,无法探测出射光线,因此只分析角度4°~38°范围,在此范围内光线达到完全全反射。由图8(a)—图8(h)可以看出经过透镜组的准直聚焦,发散影响得到了有效的改善,但由于曲线反射面的不规则轮廓,光线依然存在着发散情况且质心偏心同时存在,具体变化如图9所示。如图9(a),由模拟得到ox方向上质心偏移最大约为4.3 μm,oy方向上质心最大偏移约为 90 μm,这一数值结果再次印证ox方向可视为理想平面,oy方向有“凹透镜”效应。在图9(b)中可知RMS半径最大不超过50 μm,由质心偏移量可知此曲线延迟线具有可实施性。这一模拟结果为实际的天线提供了选择,且模拟中的光学元件可应用于实际实验装置。

图8 不同角度出射光线照度光斑及位置

图9 光线质心及RMS半径
2.3 误差分析
光学延迟线的工作环境相对稳定,引入误差有两种可能:安装误差和内部源振动误差,对此两种误差进行光学模拟。安装误差即为线切入射时放置延迟线的误差,内部源振动误差为驱动电机的振动误差,两种误差可作为一类误差考虑,主要为ox和oy方向上的偏移量。由于ox为理想平面,忽略其方向上的偏移量影响,主要分析oy方向上偏移量影响。假设oy上偏移量约为 200 μm,模拟照度如图 10(a)—图 10(h)所示,可以看出相对于图8在同一探测器oy方向上照度位置发生明显偏移。此次模拟散点图如图11(a)所示,显示ox方向质心偏移量较小,但图11(b)所示oy方向质心最大偏移约为0.15 mm,结果显示竖直误差对光线质心有明显的影响,且偏移量越大,影响越大。

图10 不同旋转角度照度位置

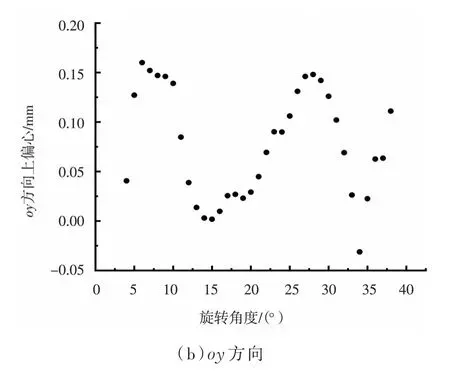
图11 竖直误差200 μm时,不同旋转角度的光线质心偏移
2.4 模态分析
延迟线由轴带动进行旋转,从而改变传播路程,因此光学延迟装置轴设计十分重要。在机械设计中,轴的直径可由公式(8)求得:

其中,P是轴的传递功率;n是轴的转动速度;[τ]是许用切应力;d为转轴直径。
若选用铝合金为轴体材料,转轴转速取2 000 rmp,电机功率取50 W进行计算,得d≥2.72mm,考虑电机的选择,转轴直径设计为18 mm。机械零件有自身的固有频率,外界频率与固有频率接近时会产生共振,为保证转轴的正常运行,进行了模态分析,模态阶数设置为6阶,选用前3阶进行分析,结果如表1所示,给出前3阶模态固有振动频率和变形结果。
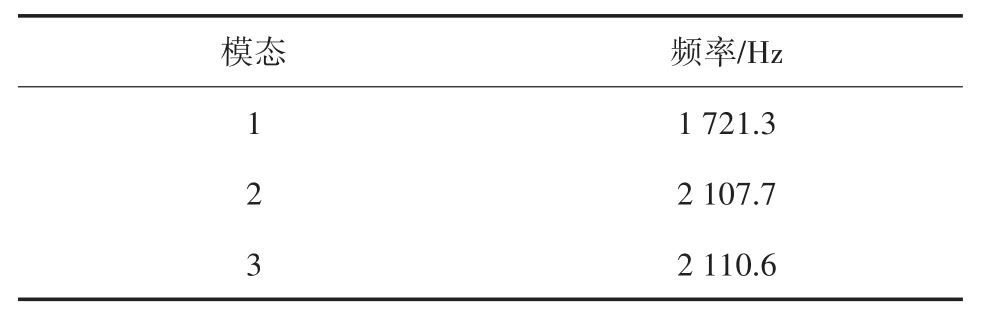
表1 模态分析结果
前3阶模态对应的延迟装置整体变形情况如图12所示,在图12(a)1阶模态下整体变形较小,轴未发生弯曲;12(b)2阶和 12(c)3阶模态旋转反射器左右摆动,轴发生明显弯曲,因此应选择转速低于1 721.3 Hz的驱动电机。

图12 前3阶模态变形情况
3 结论
本文经过延迟线原理说明和数学分析,通过光学模拟进行验证,证明此曲线反射面光学延迟线具有一定的可行性。曲线反射面的不规则形状会产生“散焦”影响,最大的影响误差是源振动误差和安装误差,当误差值为200 μm时,会产生0.15 mm的位置偏移,竖直影响较大,因此驱动电机旋转时尽可能平稳,安装时进行精密安装来减小误差影响,并通过模态分析提供合适转速的驱动电机频率,在一阶模态频率下,轴体和叶片的变形比较小。此次光学模拟结果对天线的选择具有很好的指导意义。在保证空间利用率合理的条件下,可以通过改变基圆和外圆的大小来改变延迟时间。此延迟装置利用四个曲线反射器进行旋转,有良好的周期性,一个周期可以提供127.339 mm的延迟距离,旋转一圈可达424.464 ps的延迟时间,可提供较长的扫描窗口时长,利于探测太赫兹脉冲信号。