Shapes of the fastest fish and optimal underwater and floating hulls
2022-03-04IgorNesteruk
Igor Nesteruk
Institute of Hydromechanics, National Academy of Sciences of Ukraine;
National Technical University of Ukraine “Igor Sikorsky Kyiv Polytechnic Institute”, Ukraine
Keywords:Drag reduction Wave drag Ship hulls optimization Unseparated shapes Water locomotion
ABSTRACT A streamlined shape of the best swimmers removes the boundary-layer separation and ensures a laminar flow pattern. The fastest fish have a very sharp convex nose (rostrum), the purpose of which remains unclear. The bodies of revolution similar to their shapes are analyzed in steady underwater and floating motion. The sources and sinks were located on the axis of symmetry and above the water surface to estimate the pressure on the body and the vertical velocities on the water surface. It was shown that the flow patterns on a special shaped body with concave nose has no stagnation points and ensure small values of the water surface elevation. These fact allow diminishing the maximum pressure on the surface and wave drag. Special shapes with the sharp concave nose and negative pressure gradients on their surface could be parts of the low drag underwater and floating hulls.
Shape of aquatic animals continues to draw attention of researches in the field of drag reduction. For example, the streamlined shapes of the fastest swimmers remove the boundary-layer separation [1–3], delay the transition to the turbulent flow and as a result reduce drag of underwater motion. Another feature of the fastest fish shape – the presence of a very sharp concave nose (rostrum) - needs additional investigations. In this paper, we will try to analyze the corresponding flow taking into account the presence of the water surface and to discuss the application of similar hulls to reduce the wave drag.
In the unbounded air or water flow, the attached flow pattern can be achieved on bodies of revolution with the shape similar to the trunks of aquatic animals [3,4]. Some estimates showed that the critical Reynolds numbers of the laminar-to-turbulent transition can be quite high for these unseparated bodies of revolution[5–7]. Thus, the shape itself can provide low drag of underwater motion [8]. This fact yields a very simple solution to the wellknown Gray paradox (concerning the high speed of dolphin swimming, [9–13]).
The maximal speed of the fastest fish, e.g., sailfishIstiophorus platypterus Show and Nodder, swordfishXiphias gladius L., black marlinMakaira indica Cuv et Val., etc. can approach 30 m/s, [1,14–16]. Then, the pressure on their noses can exceed the ambient one by 4.5 atm. (provided the flow velocity tends to zero). Probably,the presence of the rostrum allows these animals to remove stagnation points and to reduce pressures on their noses. The absence of the pressure peaks may reduce the wave drag of steady motion near the water surface.
To calculate the shape of a slender (elongated in the direction of steady movement), sources and sinks located on the axis of symmetry can be used. The corresponding potentials of the unbounded inviscid incompressible flow can be obtained with the use of slender body theory [17], exact solution of Euler equations [4] or numerical simulations [18–20]. In particular, axisymmetric bodies with sharp concave noses were calculated in Ref. [20] to show that the stagnation point and corresponding pressure maximum can be removed.
To investigate the movement near and on the water surface and corresponding wave drag, different approaches have been used.We will simulate the presence of the water surface by location of the sinks (sources with opposite intensities) at the same distance above the undisturbed water surface (see, e.g., Ref. [21]) and will use the sum of corresponding flow potentials.
High pressures on the vessel bow and stern cause the waves on the water surface [22–24]. The corresponding wave drag can be reduced by using the special very thing wave-piercing hulls [25–27] and bulbous bows [28]. The axisymmetric shapes with sharp concave noses calculated in [20] revealed the absence of the pressure peaks and opened up prospects for their use in order to reduce the wave drag. In this paper we will estimate the corresponding pressure distributions on their surface and the magnitudes of the vertical velocity on the undisturbed water surface at different depths of steady motion.

Fig. 1. Body of revolution under the water surface (blue line). Simulation with the use of sources and thinks
We assume the Reynolds numbers
to be large enough (for example, ReL>50000). HereU∞is the speed of ambient flow;LandVare the body length and volume;νis the kinematic viscosity. Then the thickness of the boundarylayer can be neglected and fluid outside a body can be treated as ideal. Neglecting the compressibility of water, the potential flow of a source with intensityQilocated at the pointξi,0,0 and a sink with intensity -Qilocated at the point(ξi,2h,0)can be written as follows [29]:


Parametersa, b, c, d, a1, andx*are constant.
The distributions Eq. (9) has been used in the first series of calculations. The results are shown in Figs. 2–4. Figure 2 represents an example of an axisymmetric slender body with a convex nose(see black solid lines). Its radiusR(x)have been calculated with the use of unbounded flow approach (h→∞[8]). The pressure distribution on the body surface has been calculated aty=-R(x), z=0with the use of Eqs. (3)–(5) and (8). Such body has a stagnation point (not shown in Fig. 2), where the pressure coefficient tends to 1 (according to Eq. (8)). The pressure increase in its vicinity is visible in Fig. 2. The presence of the water surface decreases the absolute values of the pressure (see dashed lines). Negative pressure gradients are present both on the bow and stern of the body both in underwater mode (the black dashed lines) and near the water surface (other dashed lines).

Fig. 2. Slender body of revolution with a convex nose. Body shape (solid lines) and pressure coefficients on the body surface (at y=-R(x), z=0) at different depths of steady motion h (dashed lines).
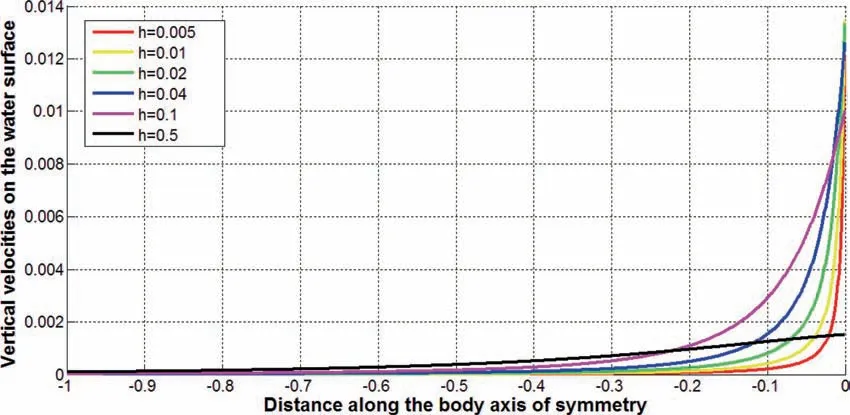
Fig. 3. Vertical velocities on the water surface upstream of the body with a convex nose at different depths of steady motion.
The vertical velocities on the undisturbed water surfacey=hatz=0 have been calculated for different values of the depthhwith the use of Eq. (7) and are shown in Figs. 3 and 4 upstream and downstream of the body, respectively. It can be seen that values of|vy(x,h,0)|are much higher near the bow (in comparison with the stern). The bow stagnation point and corresponding pressure peaks shown in Fig. 2 can explain this fact.
In the second series of calculations, sources distributions Eq. (10) have been used. The results are shown in Figs. 5 and 6.Figure 5 represents a slender body of revolution with a sharp concave nose (see black solid lines) similar to the trunk of sailfish. Its radiusR(x)have been calculated with the use of unbounded flow approach (h→∞, [20]). The pressure distribution on the body surface has been calculated aty=-R(x), z=0with the use of Eqs. (3)–(5) and (8). Such body has no stagnation point and the pressure coefficients gradually increase versus distance from the nose. As in the case of the convex nose body, the presence of the water surface decreases the absolute values of the pressure (see dashed lines). Negative pressure gradients are present both upstream and downstream of the middle (the cross section with the maximal radiusRmax) both in underwater mode (the black dashed line) and near the water surface (other dashed lines).
The vertical velocities on the undisturbed water surfacey=hatz=0 have been calculated for different values of the depthhwith the use of Eq. (7) and are shown in Fig. 6 (upstream of the body).The downstream vertical velocities are very close to the case of the convex nose body shown in Fig. 4. Figure 6 illustrates that for small depths of motion (h<0.1), the values ofvy(x,h,0)are much lower in comparison with the convex nose case shown in Fig. 3. This fact can be explained by the absence of the bow stagnation point and the low values of pressure near the nose shown in Fig. 5. Thus, we can conclude that special shaped bodies of revolution with sharp concave noses are expected to have smaller wave drag in a floating mode of motion.
The absence of the boundary-layer separation yields the minimum possible drag of underwater motion by decreasing its pressure and frictional components (in particular, due to the delay of the laminar-to-turbulent transition [8]). The pressure increases on the noses of bodies with the rostrum (shown in Fig. 4 and Ref.[20]), (in comparison with convex noses shown in Fig. 2 and some other shapes calculated and tested in Refs. [3,4,17–20]). Possible separation in these zones of pressure increase requires further research, but rigid copies of the trunks of sailfish and swordfish revealed an attached flow pattern in experiments performed in Ref.[1].
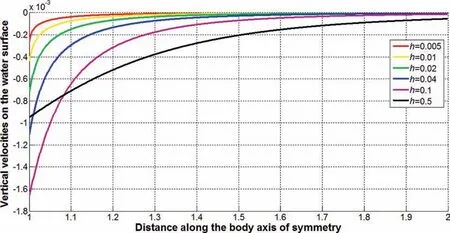
Fig. 4. Vertical velocities on the water surface downstream of the body with a convex nose at different depths of steady motion.
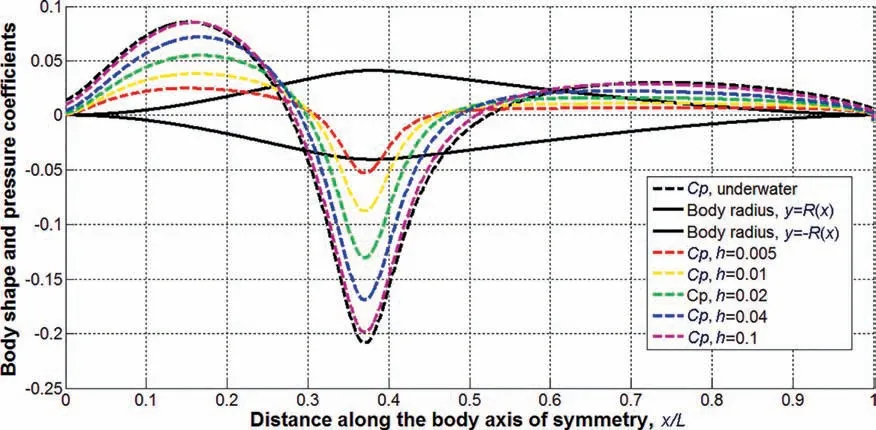
Fig. 5. Slender body of revolution with a concave nose similar to the trunk of sailfish. Body shape (solid lines) and pressure coefficients on the body surface (at y=-R(x),z=0) at different depths of steady motion h (dashed lines).
For the underwater steady motion of a slender unseparated body of revolution, its dragXcan be estimated by the following equations [5–8]:

Here the lengthLthe animal body or a hull must be taken in meters [8]. Estimates of the valueUmax/L7/9 are 13 - 20.8 for sailfish, 11.5 -15.1 for swordfish and 8.4–11.8 for black marlin [8]. They are close to the maximal one (see Eq. (14)) and are mostly higher in comparison with some other good swimmers which have no rostrum (sharks, dolphins, tunas). TheUmax/L7/9 ratios for torpedoes Mark 48 and Spearfish (having no rostrum) are 7.23 and 9.17,respectively [8]. Thus, we can conclude that the presence of rostrum (a sharp concave nose) does not increase the drag of underwater motion.

Fig. 6. Vertical velocities on the water surface upstream of the body with a concave nose at different depths of steady motion.
The proposed shapes can be recommended for the underwater hulls of small waterplane area twin hull (SWATH) ships (see, e.g.,Ref. [31]), since the disturbances of the water surface and corresponding wave drag reduce at rather small values ofh(see the black lines in Figs. 3, 4 and 6). The total drag on such hulls can be estimated with the use of Eqs. (11) or (13).
The separation and drag on special shaped bodies with rostrum moving in floating mode (small values ofh) need experimental investigations. If we assume that Eqs. (11) and (12) are applicable to estimate the laminar friction drag and take into account the very low vertical velocities at small depthh(see the red line in Fig. 6),the proposed special shaped bodied of revolution with the concave nose can be recommended for the hulls of rowing shells. We could expect to have the lowest possible friction and wave drag on such shells. In must be noted that modern rowing racing shells have circular cross sections (in comparison with the classical Wigley hulls,).
For lager or faster ships, the corresponding Reynolds numbers are much higher than the critical value Eq. (12). If we suppose that the turbulent friction dragDfis proportional to the hull surface area wetted by water, than the ratioDfh/Dfuincreases from 0.5 to 1.0 when thehchanges from zero toh=Rmax(hereDfuis the friction drag at completely submerged body of revolution of maximal radiusRmax). Taking into account that the ratio of corresponding volumesVh/Valso changes from 0.5 to 1.0 (Vhis the volume of the underwater part of the body at the depth of motionh), we can expect the increase of the ratio of the volumetric friction drag coefficients CVh/CVu(for the floating and underwater motion modes,respectively) from 0.794 to 1.0 when thehchanges from zero toh=Rmax. Since the shapes with rostrums ensure small disturbances of the water surface and reduce the wave drag at small values ofh, (see Figs. 4 and 6) they can be recommended for ship hulls as well. The optimal values ofhand the hull aspect ratioL/Rmaxhave to be determined as a result of tower tank experiments.
Steady motion of special shaped slender bodies of revolution near the water surface was investigated in order to estimate the influence of the nose shape on the pressure distribution and vertical velocities on the water surface. It was shown that shapes with a sharp concave nose (rostrum) similar to trunks of the fastest fish(sailfish, swordfish, black marlin, etc.) have no stagnation point.This fact allows diminishing the maximum pressure on the surface,reducing the vertical velocities on the water surface and corresponding wave drag. Such shapes could be recommended for hulls of traditional and SWATH ships and rowing racing shells after corresponding tower tank experiments.
Declaration of Competing InterestThe authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
杂志排行
Theoretical & Applied Mechanics Letters的其它文章
- Generalized boundary dilatation flux on a flexible wall
- Fourier neural operator approach to large eddy simulation of three-dimensional turbulence
- Elastoplastic constitutive modeling under the complex loading driven by GRU and small-amount data
- Numerical simulation of laser ultrasonic detection of the surface microdefects on laser powder bed fusion additive manufactured 316L stainless steel
- Sedimentation motion of sand particles in moving water (I): The resistance on a small sphere moving in non-uniform flow☆,☆☆
- Predicting solutions of the Lotka-Volterra equation using hybrid deep network