直接力/气动力复合控制技术发展综述
2022-03-04郭建国彭谦周敏
郭建国 彭谦 周敏


摘 要:直接力/气动力复合控制的本质是利用直接力响应速度快的特性提升被控飞行器的机动性和快速性,能够有效补偿气动力不足导致的气动力控制响应慢问题。 本文阐述了直接力/气动力复合控制系统的特性及关键问题,从发动机配置方式、国内外直接力建模研究现状、以及直接力控制干扰建模三方面介绍了直接力/气动力复合控制系统建模方法,从控制方式、国内外直接力/气动力复合控制研究现状、以及脉冲发动机点火算法三方面介绍了直接力/气动力复合控制方法,给出了可行的发动机复合系统稳定性分析方法,对直接力/气动力复合控制未来的发展趋势进行了展望,并对其关键技术进行了总结。
关键词:直接力;气动力;制导控制系统;直接侧向力;控制分配;脉冲发动机;点火算法
中图分类号:TJ760;V249.1 文献标识码: A 文章编号:1673-5048(2022)01-0001-13[SQ0]
0 引 言
直接力控制利用发动机喷气的反作用力产生推力,作用于被控对象从而实现控制任务,具有响应速度快、不受大气环境影响的特性,适用于临近空间、大气层外等飞行环境[1]。 直接力/气动力复合控制指直接力控制与气动力控制复合或多种直接力复合的控制方法,本质上是一种多执行机构组合协调控制系统,利用直接力控制的快速响应能力补偿气动力不足导致的气动力控制响应慢问题,进而提高控制精度。
在气动力不足的场景下,引入直接力控制能显著提升其被控對象性能。 直接力控制有直接侧向力控制和推力矢量控制两种。 直接侧向力控制,又称为反作用喷流控制,通过点燃侧向脉冲发动机产生侧向推力提供加速度或额外的力矩增量,可以有效地提高可用过载,减小响应时间,改善飞行末段控制性能,是一种成熟可靠的控制方式[2-4]。 推力矢量控制通过控制发动机推力相对弹轴的方向来产生机动飞行所需的控制力矩[5]。 由直接力控制产生的力/力矩增量与被控对象的飞行高度、速度均无关,大大提高了被控对象的机动性和快速性。
直接力/气动力复合控制方法的提出与研究具有很强的工程应用价值。 随着飞行器性能的不断提升,防空系统面临的威胁也在不断升级,从飞机类目标转向飞行速度更快、机动能力更强、威胁更大的目标,如弹道导弹、巡航导弹和高超声速飞行器等[6-8]。 传统拦截器采用纯气动的控制方式,调整舵偏转产生操纵力矩,控制其所受气动力,实现拦截器飞行控制。 气动控制在稠密大气环境中响应时间一般大于0.1 s;若在拦截末段飞行高度高、大气稀薄的环境下,气动控制的响应时间一般大于1 s,此时,纯气动控制不能及时响应制导指令,从而导致拦截失败[2, 7, 9-11]。 另一方面,破片杀伤式战斗部的破片质量太小,即使成功命中,也不能对目标造成有效打击[12]。 碰撞毁伤利用拦截弹与目标在高速碰撞中产生的动能进行毁伤,杀伤能力显著强于传统的破片杀伤[13],需要拦截器快速响应指令, 并精准碰撞目标关键部位。 直接力控制的响应时间一般为6~10 ms,且不受大气环境密度变化影响[14-16]。 因此,提出了直接力/气动力复合控制技术,将其作为在气动力不足环境中工作的飞行器的控制核心。
直接力/气动力复合控制技术被广泛应用于气动力不足的场景中,如防空反导系统中的拦截器和需要再入飞行的可重复使用飞行器。 典型型号有美国的拦截器PAC-3, THAAD, 可重复使用飞行器X-37B;俄罗斯的拦截器S-400系列中的9M96E/E2; 法国、意大利联合研制的Aster-15/30等。 PAC-3采用姿控复合控制,在弹体前部加装姿控发动机配合自旋来增强机动能力,主要用于对高度在40 km以下的弹道导弹飞行末段进行拦截[17];为了填补PAC-3拦截高度低的缺点,美国研发了姿轨控复合控制的THAAD导弹,采用轴对称无翼无舵的设计,可拦截高度范围为40~150 km[18]。 美国X-37B采用了翼身融合的升力体气动布局,运行轨道高度为约400 km的低地球轨道[19],其复合控制系统包含气动舵面、反作用控制系统和轨道机动系统,前后RCS共28个,其喷口大小和气流方向都有特别设计,相较于拦截器更为复杂[20]。 俄罗斯S-400系列中的9M96E/E2导弹采用轨控复合控制,在导弹质心加装微型喷管轨控发动机,快速修偏能力强[21]。
本文分析了直接力/气动力复合控制特性及关键问题,介绍了直接力/气动力复合控制系统建模方法、稳定性分析方法及控制方法,并在此基础上展望了直接力/气动力复合控制技术未来的相关研究及发展方向。
1 直接力/气动力复合控制特性及关键问题
直接力/气动力复合控制(简称直/气复合控制)本质上是一种多执行机构协调控制系统,适用于对系统响应速度、机动能力有较高要求的各种应用场景,特性如下:
(1) 多输入的多执行机构组合系统
直/气复合控制至少有两种控制量,属于多输入系统。 以直接侧向力/气动力复合控制拦截器为例,控制系统的执行机构为气动舵和姿/轨控脉冲发动机,输入控制量为舵偏角和脉冲发动机的开关序列。
(2) 直接力执行机构存在控制受限问题
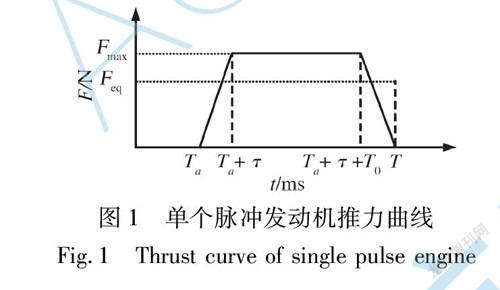
提供直接力控制量的执行机构以脉冲发动机最为常见。 脉冲发动机的基本工作曲线如图1所示。
由图可以看出,脉冲发动机属于离散控制,可能具有工作时间受限、推力大小受限等控制受限问题;结合实际工程应用,脉冲发动机还存在安装位置受限、使用次数受限、不可重复使用等控制受限问题。
(3) 异类执行机构协调控制
气动舵的控制输入为舵偏角,可以在一定范围内连续变化,属于连续控制执行机构;脉冲发动机的控制输入为脉冲发动机的开关序列,属于离散控制执行机构;另一方面,姿/轨控发动机复合控制也会因发动机工作特性不同,同时存在连续控制量与离散控制量。 因此,直/气复合控制系统中往往存在连续/离散控制量耦合,在其控制系统设计中需要协调异类执行机构。
(4) 存在力/力矩强耦合
力矩控制量影响被控对象的姿态,而力控制量影响被控对象的运动轨迹。 气动力控制量通过提供力矩增量调整被控对象姿态,从而实现进一步的控制;直接力控制量根据执行机构的配置位置可以提供力/力矩两种控制量,甚至同时提供力/力矩两种控制量。
由于以上特性,直/气复合控制系统研究中存在以下关键问题:
(1) 执行机构工作特性复杂,建模困难;
(2) 控制形式多样,执行机构选择困难;
(3) 同时存在多种异类控制量且控制受限,设计协调控制方法并尽可能发挥复合控制性能;
(4) 耦合问题严重,稳定性分析难;
(5) 执行机构间互相影响,干扰复杂;
(6) 力/力矩控制量强耦合,导致制导控制系统耦合。
現有研究在直/气复合控制系统建模、复合控制方法设计方面有较多的成果,在复合控制系统稳定性分析、制导控制系统耦合等方面缺乏研究。
2 姿/轨控发动机配置及建模
气动力控制指通过调整气动舵产生额外力矩改变导弹姿态,从而改变其气动力的传统控制方式。 气动力控制是一种很成熟的控制方法,本节主要以复合控制拦截器为例,从发动机配置方式、直接力建模方法国内外研究现状及控制干扰三方面介绍直接侧向力在复合控制系统中的建模方法。
2.1 姿/轨控发动机配置方式
侧喷脉冲发动机是提供直接侧向力应用最广泛的执行机构,具有开关性质[22],点火后能够快速产生直接侧向推力,但存在严重的控制受限问题,如工作时间受限、推力大小受限、安装位置受限、使用次数有限、不可重复使用等。
根据脉冲发动机的安装位置,直接侧向力控制又分为姿态控制与轨道控制两种。
(1) 姿态控制通过安装在相对质心一定距离的侧喷发动机提供直接力产生转动力矩,快速改变导弹姿态,最后依靠气动力来产生过载。 姿控脉冲发动机可安装在质心前或质心后。 若姿控装置安装在质心前,在其作用下由弹体姿态产生的气动过载与姿控直接力方向相同,控制效率更高;若姿控装置安装在质心后,在其作用下由弹体姿态产生的气动过载与姿控直接力方向相反,控制效率会被抵消一部分,但对流场影响更小[23]。 实际工程应用中,姿控装置大多安装在质心前。
(2) 轨道控制通过安装在质心附近的侧喷发动机提供直接力形成横向推力,快速改变导弹加速度且不受气动环境影响,可直接使质心移动,从而实现机动。
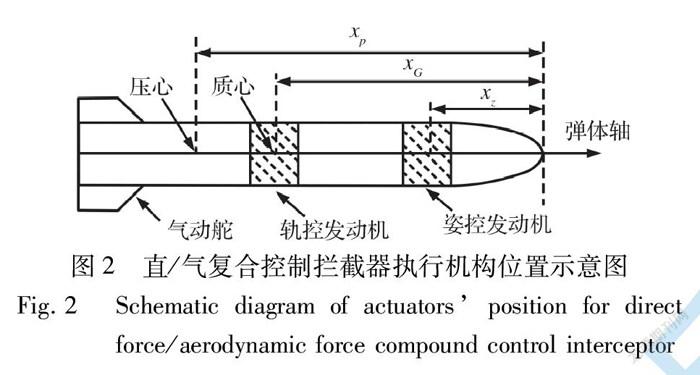
无论姿控还是轨控,直接侧向力都由垂直于弹体轴线径向的侧喷发动机提供。 以直/气复合控制拦截器为例,气动舵、姿控发动机、轨控发动机在弹体上的典型分布如图2所示,有xp>xG>xz。
建模方法与配置紧密相关。 基于执行机构组合的直/气复合控制典型配置方式有以下几种:
(1) 姿/轨控发动机复合控制
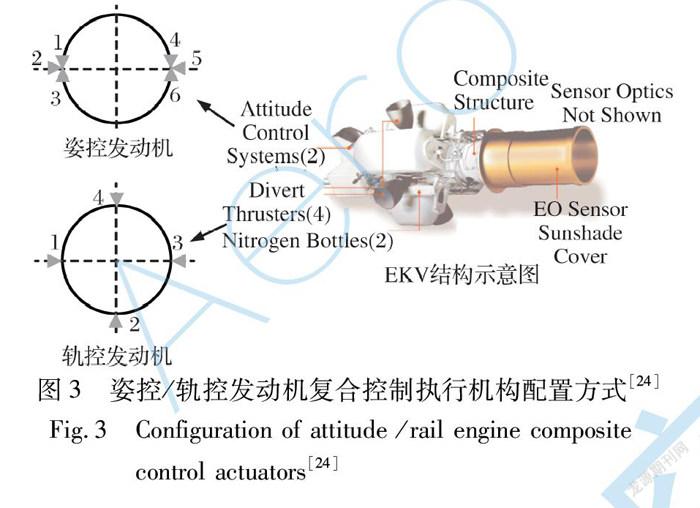
姿/轨控发动机复合控制方式受气动环境影响小,适用于大气稀薄环境或真空环境中。 姿/轨控脉冲发动机复合控制的典型配置是分通道控制,如大气层外杀伤飞行体(EKV)。
姿/轨控发动机复合控制执行机构配置方式如图3所示。 喷口2和5负责偏航通道控制,喷口1+4组合、3+6组合负责俯仰通道控制,喷口1+6组合、3+4组合负责滚转通道控制,各喷口共用同一个燃烧室,姿控脉冲发动机可提供的直接力总冲固定,但各喷口的工作时间可以通过喷口的开关调整。 轨控脉冲发动机的喷口1和3负责偏航通道运动,喷口2和4负责俯仰通道运动,其工作时间可调、推力大小可调。
(2) 姿控/气动舵复合控制
姿控/气动舵复合控制配置方式根据被控对象飞行方式,可分为滚转与不滚转两种。
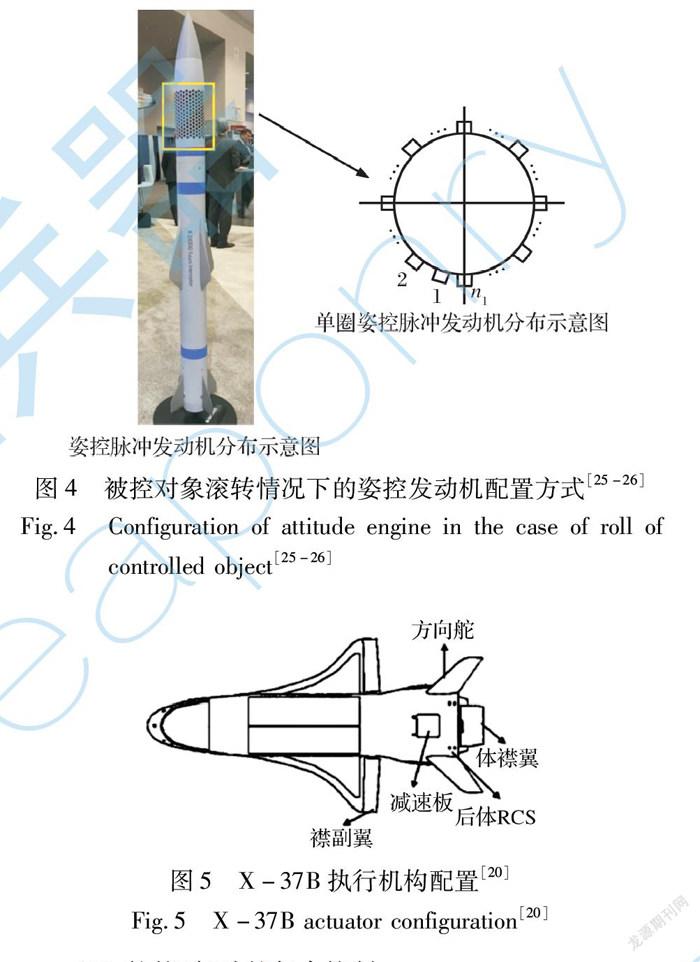
飞行器滚转会造成俯仰/偏航通道的严重耦合,发动机喷口位置随着弹体滚转而变化,可提供的直接侧向力方向更灵活,但脉冲发动机的点火策略设计复杂。 姿控/气动舵复合控制的姿控脉冲发动机配置如图4所示,侧喷脉冲发动机喷口位置固定,数圈脉冲发动机喷口交错分布,各喷口可提供一次脉冲推力。
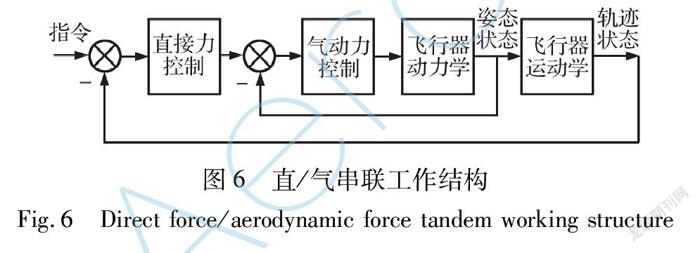
对于不滚转飞行器,各通道控制可解耦,脉冲发动机配置及点火策略设计相对简单,但需要设计控制器保证拦截器的滚转通道稳定。 不滚转姿控/气动舵复合控制的典型配置是美国X-37B飞行器,如图5所示,其反作用控制系统(RCS)安装在飞行器后体,气喷口大小和方向根据辅助配平和控制需求进行了特别设计[20]。
(3) 轨控/气动舵复合控制
轨控/气动舵复合控制用于对飞行轨迹进行快速修偏,典型型号是法国Aster-15/30[13, 27],其轨控发动机在飞行器质心位置均匀分布4个喷口,与图3中的轨控发动机分布类似。
2.2 直接力建模研究现状
气动舵属于连续的执行机构,建模方式很成熟。 对于复合系统中的直接力控制量,现有研究采用了不同的描述方法。
直接力模型建立在拦截器运动学/动力学模型的基础上,对于滚转拦截器,则采用准坐标系下的运动学/动力学模型[28]。 在建立直接力控制的数学模型前,首先明确其执行机构特性。 脉冲发动机燃料有固体和液体两种,固体脉冲发动机工作时间固定、推力固定;而液体脉冲发动机可通过控制液体燃料的流量随意控制发动机的开启和关闭,使推力大小精确可调[23]。 这里主要阐述直/气复合控制系统建模研究中主流的几种直接力建模方法。
由于发动机结构、燃料等不同,其产生的推力有连续可调或大小固定两种作用形式,推力大小固定的情况下又分为脉冲宽度可调或固定。 脉冲宽度可调的直接力执行机构便于验证一些控制方法的应用,但是从加工工艺和实际应用的角度看,脉冲宽度固定的发动机占有一定的优势[29]。 研究者根据需求基于以下几类直接力工作方式建模。
(1) 大小可调的连续直接力控制量
对于直/气复合控制方法的研究可以追溯到20世纪90年代初期,早期研究对直/气复合控制系统进行简化处理,不考虑直接力执行机构的复杂特性,往往将其视为大小可调的连续控制[30-31]或其他类似的形式[32]。 1991年,Weil等[30]在平衡飞行状态建立了纵向通道线性化导弹模型,假设直接力控制量是连续可调的,利用线性二次型调节器(LQR)设计控制律。 研究结果表明,复合控制响应速度更快,且在不牺牲性能的前提下,对气动舵效能要求比纯气动控制更低。 1998年,Wise等[31]将侧向推力视为连续可调控制量,研究了推力矢量/侧向推力控制(TVC/RCS)交替控制敏捷导弹做大攻角机动的复合控制方法。 Innocenti等[32]是在直/气复合控制领域研究中采用滑模变结构方法的代表人物,他们分别针对大、小攻角建立控制模型,将直接侧向力视为通过阀门开度调整的、具有一阶系统特性的连续量,采用滑模变结构设计控制器。
部分研究为了适应基于连续系统的先进控制方法,忽略了直接力的离散特性而将其视为连续力[33-38]。 文献[33-34]将直接力控制量视为具有一阶系统响应特性的连续量,基于固定/有限时间收敛的滑模控制方法设计了复合控制系统。 文献[35]将直接力视为连续可调控制量,以加速度和转速作为输出变量,采用反馈线性化技术设计复合控制系统。 文献[36]将直接力视为大小固定、作用时间可调的连续量,通过调整占空比,实现一定范围内任意可调的连续直接力控制量,基于执行机构效能归一化和终端滑模方法设计了直/气复合控制器。 文献[37]将直接力看作是通过阀门调整的连续量,基于滑模控制方法,设计了导弹大攻角机动的直/气复合控制律。 文献[38]分别用自适应滑模控制和模糊逻辑设计了气动力、直接力子系统,最后利用遗传算法将其协调组合成直/气复合控制系统。
将直接力视为连续控制量的复合控制系统设计简单,且适用于各种控制方法,但却是一种过于理想的简化方法,与实际工程应用差距较大。
(2) 通过脉冲调制器转化为离散的直接力控制量
部分研究着重考虑了直接力的离散特性,同时又兼顾设计的便捷。 先假设直接力是连续的,通过控制器得到控制量后,再通过脉冲调制器将连续控制量转化为离散控制量。 文献[39]采用智能算法实现控制量分配,并设计了基于模糊控制的姿控发动机点火算法。 文献[40]假设直接力是连续控制量,设计了直接力指令与气动力指令间的转换关系,利用三回路方法得到混合控制量。 文献[41]设计了快、慢双环回路控制系统,利用滑模控制方法得到需用控制力矩,并采用链式递增融合分配直/气控制量。 文献[39-41]都是在得到需用直接力控制量后,利用脉冲调宽调频(PWPF),将连续控制转化为离散控制量传递给直接侧向力执行机构。
先假设直接力为连续控制量,再通过脉冲调制器转化为离散控制量输入执行机构的方法,具有连续直接力控制的优势,如设计简单、适用于各种控制方法等,同时兼顾了执行机构的离散特性,更贴合实际工程应用。 然而,其使用的执行机构类型受限,且不能发挥直/气复合控制系统的最大效能,尤其是对于推力大小不可调的脉冲发动机,这种建模方法会导致控制指令与执行机构的严重不匹配。
(3) 离散的直接力控制量
脉冲发动机是各类直接力执行机构中特性最为复杂、控制受限最严重的,但由于其成熟的制造工艺和相对低廉的成本,目前被广泛应用于直/气复合飞行器。 部分研究尽可能地使直/气复合控制模型贴合脉冲发动机的实际特性考虑其控制受限问题,在模型中假设直接力大小固定,且工作周期不可调,具有开关性质[42-46]。 文献[42]认为单个脉冲发动机推力大小和作用时间都是固定不变的常数,采用自适应高阶滑模控制方法和二次规划最优化方法,得到了气动舵及脉冲发动机的控制量。 文献[43]考虑了脉冲发动机推力大小和作用时间固定的特性,并在此基础上,充分利用气动控制减少消耗脉冲发动机的数量。 文献[45]用梯形剖面近似描述姿控脉冲发动机推力的离散特性,应用非线性系统理论对俯仰平面内姿控系统模型进行分析,详细阐述了模型简化原理,采用滑模变结构控制理论设计了复合控制律,并根据气动力和直接侧向力控制的特点实现控制指令。 文献[46]充分考虑了脉冲发动机的工作特性,包括不可重复使用、推力响应曲线等,当需要的推力积分等于脉冲发动机单次工作提供的力时,启动对应的脉冲发动机。
考慮了脉冲发动机推力大小和作用时间固定的控制受限问题,并以脉冲发动机点火个数作为控制输入[47-50]。 文献[47]将气动舵和脉冲发动机视为内外回路分别设计控制器,其中气动舵控制回路使用有限时间稳定理论,脉冲发动机控制回路使用Backstepping方法,在整个控制系统中通过控制角速度间接实现攻角的反馈。 文献[48]除了考虑脉冲发动机的推力大小和工作时间固定外,还考虑了单个脉冲发动机使用过后不可重复启动的特性,并且在建模中引入了侧向喷流气动干扰及马格努斯力矩,提出了一种分阶段复合控制策略,并利用整数线性规划方法,计算需用脉冲发动机数量。 文献[49]将滑模控制方法与反步法结合设计控制器,利用离散的脉冲发动机实现滑模控制的不连续控制量,通过气动舵实现滑模控制的连续控制量,使被控状态的有限时间收敛。 文献[50]采用混合控制系统方法设计控制器,先完成气动舵连续系统设计,再完成脉冲发动机离散控制系统设计。
结合脉冲发动机的实际工作特性,离散的直接力控制量的复合控制系统设计复杂,但是能够充分反映执行机构特性,发挥直/气复合控制系统的最大效能。
2.3 直接力/气动力复合控制干扰
发动机复合控制利用直接力控制提升被控对象的性能,但同时引入了侧向喷流气动干扰、发动机开关延迟干扰以及各通道间耦合干扰等。
(1) 侧向喷流气动干扰
侧喷发动机喷流和高速飞行的飞行器表面及周围气流发生相互作用,在喷口周围及其上、下游流场形成复杂的流动,严重影响侧喷发动机效率和导弹表面流场,使作用在导弹上的力分布发生剧烈的改变,造成侧向喷流气动干扰[16]。 侧向喷流气动干扰与喷流、来流及导弹外形等相关,具有很大的非线性及不确定性,严重影响直接力控制的精度及响应速度,是直/气复合控制系统设计中必须考虑的因素[51-52]。 目前,针对直接力侧向喷流的研究包括攻角、喷口数量和布局、喷口型面和形状等对侧向喷流干扰流场的影响,以及侧向喷流与舵面的互相干扰等方面已有较成熟的结论[53]。
在建立动力学模型时引入侧向喷流气动干扰的影响,以侧向喷流产生的干扰力和力矩放大因子形式表示[48, 54],从而使控制器具备抑制侧向喷流气动干扰的能力。
(2) 发动机开关延迟干扰
如图1所示,发动机开/关机时存在延迟干扰,包括发动机响应延迟和性能上升/下降延迟,导致发动机不能精准执行控制指令。
发动机延迟相关参数及单个周期内的推力曲线可以在弹下通过实验测算。 通过在控制律设计中引入这些参量,可以最大程度地削弱开关延迟干扰的影响。
(3) 各通道间耦合干扰
由于发动机喷口相对弹体位置固定,而弹体姿态在飞行过程中一直维持着动态稳定,导致发动机很难在期望方向提供准确且稳定的直接力,从而引起了各通道间的耦合。
各通道间的耦合干扰是不可避免的,在控制器设计中引入弹体姿态和当前时刻发动机喷口朝向,不以完全解耦的方式分别设计各通道控制器,而是将控制量引起的通道间耦合引入控制器设计中,根据该时刻喷口朝向有针对性地给出控制指令,将不利干扰转化为有利干扰。
3 直/气复合控制系统稳定性分析方法
稳定是任何一个系统正常工作的先决条件。 直/气复合控制系统包含多种、异类执行机构,气动力控制一般为连续控制,直接力控制则可能具有离散特性,致使复合系统中不可避免地存在连续/离散耦合问题;直接力的作用点不同,则会导致力/力矩耦合问题。 因此,传统的连续系统单一执行机构的稳定性分析方法不适用于直/气复合控制系统。 目前,直/气复合控制领域相关的研究大多仅通过数学仿真验证其稳定性,对其稳定性的理论推导和分析尚不多见,下面将基于现有的研究介绍复合控制系统稳定分析的思路和进展。
(1) 切换系统稳定性分析
直/氣复合控制系统中存在异类执行机构,启用不同的执行机构,被控对象的模型随即发生改变。 因此,可以采用切换系统稳定性分析的有关思路和结论,分析存在复杂耦合和控制受限问题的直/气复合控制系统的稳定性。 切换系统稳定性分析有以下几种方法[55-56]:
a.基于公共李雅普诺夫函数的切换系统稳定性分析
该方法难点在于确定公共李雅普诺夫函数。 公共李雅普诺夫函数一般仅是判断系统稳定的充分条件,在找不到公共李雅普诺夫函数或证明系统不存在公共李雅普诺夫函数的情况下,都不能断言切换系统的稳定性[55, 57]。
b.基于多李雅普诺夫函数的切换系统稳定性分析
多李雅普诺夫函数方法通过为每一个子系统选择一个李雅普诺夫函数来避免确定公共李雅普诺夫函数的问题。 基于多李雅普诺夫函数研究成果可以得到结论:假设系统有限时间内只能切换有限次,若切换时刻的能量是递减的,则系统是渐近稳定的[55, 58]。
c.基于驻留时间的切换系统稳定性
基于驻留时间的判定方法是:系统在每个子系统的驻留时间足够长时,能保证切换系统的稳定性[59-60]。
d.基于矩阵测度的切换系统稳定性分析
该方法的优点是不需要构造李雅普诺夫函数,只需通过计算子系统矩阵测度即可判断切换系统的稳定性; 缺陷是保守性大,判断结果不准确[61]。
(2) 基于相平面的稳定性分析
相平面分析的方法作为一种图解法,不用设计函数或求解方程,通过相轨迹反映系统的运动,即可分析系统的稳定性。
文献[40]和文献[62]基于描述函数与相平面分析了直/气复合控制系统的稳定性。 文献[40]利用脉冲调制器得到了离散的直接侧向力控制量,给出了脉冲调制器的非线性描述函数,通过脉冲调制器的描述函数与控制系统中线性环节的奈奎斯特曲线分析了直/气复合系统的稳定性。 文献[62]基于描述函数相关理论和奈奎斯特曲线,分析了具有非线性量化特性和死区特性的脉冲发动机对复合控制系统稳定性的影响。
4 直/气复合控制方法
为了在稀薄大气环境中实现各种高机动任务,飞行器控制系统设计中越来越多地采用了能够显著提高响应速度的直/气复合控制技术,但也随之带来了许多设计上的问题。 本节以直/气复合控制拦截器为例,介绍直/气复合控制方式、国内外直/气复合控制方法研究现状及脉冲发动机点火算法。
4.1 直/气复合控制方式
直接力大小和响应速度不受气动环境和导弹飞行速度影响,其高空优势尤为突出,适用空域更大[63];气动力控制严重依赖于气动环境,在大气稠密环境中优势明显,且相关控制理论与工程应用都很成熟。 直接力控制响应速度快、不受环境影响,但相较于力矩控制,需要提供更多的输入能量来实现[2]。 对于直/气复合控制来说,各个控制量能否良好地配合,直接决定了复合控制系统的性能优劣[2, 64-65]。
根据执行机构的不同,直/气复合控制可分为三种:姿控复合式、轨控复合式和姿/轨控复合式。
(1) 姿控复合式指姿控与气动舵控制相结合的复合控制系统,采用力矩控制的方式,通过改变导弹的飞行姿态产生气动力,进而控制导弹飞行弹道。 现有典型拦截器型号为美国PAC-3。
(2) 轨控复合式指轨控与气动舵控制相结合的复合控制系统,发动机与气动舵分别提供力控制和力矩控制,力控制调整导弹飞行弹道,力矩控制调整导弹飞行姿态。 现有典型拦截器型号为俄罗斯S-400系列中的9M96E/E2、意大利/法国联合研制的Aster-15/30。
(3) 姿/轨控复合式指姿控与轨控相结合的复合控制系统,主要用于稀薄大气或真空环境中。 轨控发动机提供力控制来调整导弹飞行弹道;姿控发动机提供力/力矩混合控制,其中,以力矩控制为主,用于调整导弹飞行姿态。 现有典型拦截器型号为美国THAAD。
4.2 直/气复合控制方法研究现状
多执行机构的复合控制系统与单一执行机构控制系统不同,除了基于各种控制理论的控制律外,还包含复合协调控制模式。 复合协调控制模式是多个控制量协调工作的框架,从结构上可分为四种模式[55, 66]:控制量串联、控制量切换、直接力前馈、控制量并行。 下面以直/气复合为例,介绍上述四种协调控制模式。
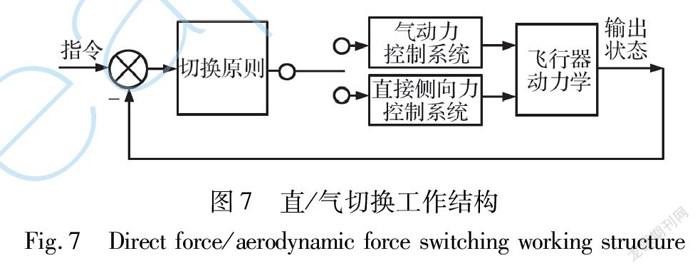
(1) 直/气串联工作
直/气串联工作方案考虑到多种执行机构的工作特性和工作周期不同,将气动力、直接力控制系统视为内、外回路,分别设计控制器[29, 47-48, 50, 67],如图6所示。
由于气动舵的采样控制周期远小于脉冲发动机的工作周期,可以视为连续系统设计,文献[29]和文献[50]将气动舵控制系统视为连续的内环系统设计了控制器,之后,针对包含舵控系统反馈量的连续系统设计脉冲发动机的离散控制器。 在文献[50]的基础上,文献[67]充分考虑了气动舵的饱和以及脉冲发动机点火序列与实际需用直接力的偏差,在保证导弹动态响应能力的情况下,减少了发动机的消耗。 文献[47]采用有限时间稳定理论设计气动力控制的内回路以求实现最短时间控制,采用反步法设计直接侧向力控制的外回路以求加快控制系统的响应速度,并在整个控制系统中引入“隐攻角反馈”,进一步改善系统的响应性能。 文献[48]提出了一种分时串联的复合控制策略,利用整数线性规划方法得到脉冲发动机需用数量作为控制输入,基于动态逆控制和自抗扰控制方法设计气动舵控制律。
将直/气复合控制分为内、外回路分别设计控制器的方法,能够充分考虑执行机构工作特性和采样周期的差异,灵活选择两回路的控制器实现方法,同时也降低了复合控制系统设计的复杂性,但缺乏对直/气协调作用的考虑,不能充分发挥直/气复合控制系统的性能。
(2) 直/气切换工作
直/气切换工作方案中,直接力控制系统与气动力控制系统不同时工作,而是依据直接力判别条件选择其中之一实现控制指令,在采用气动力执行机构的控制输入时,不考慮直接力的作用,反之亦然。 文献[68]采用切换工作结构分别设计气动力控制律与直接侧向力控制律,并结合模糊控制方法设计直接侧向力判别条件,如图7所示。 文献[69]在保证气动力和直接力系统都稳定的情况下,分别设计两系统控制律,并基于状态反馈设计切换律,给出了气动力和直接力系统的切换序列。
切换工作方案的特点是设计简单,不存在多执行机构同时作用的情况,缺陷是缺乏执行机构间的协调,不能发挥直/气复合控制系统的最大性能。
(3) 直接力前馈工作
直接力前馈工作方案以前馈-反馈双回路的结构设计直/气复合控制系统,气动力控制作为反馈回路,在此基础上加入直接力控制作为前馈回路,如图8所示。 前馈回路的直接力控制主要用于调整飞行器在大机动运动下的动态过程,在稳态或者非机动运动情况下则无需使用[70]。
文献[71]基于反馈和前馈的系数图表方法设计控制器,其中气动力控制作为反馈控制,直接力控制作为前馈控制。 文献[70]基于前馈-反馈结构设计了直/气复合控制系统,采用进化策略完成了系统参数的多目标优化。
直接力前馈的方案相较于串联、切换方案增加了直接力/气动力控制的配合,但设计略复杂,且同样没有将直接力/气动力控制视为系统的多个输入同时进行设计,不能发挥直/气复合控制系统的最大性能。
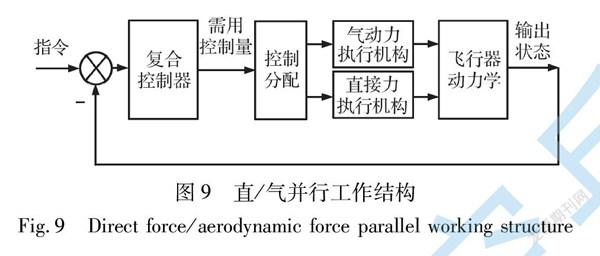
(4) 直/气并行工作
由于异类执行机构结构、特性差异较大,多采用复合控制器、控制分配策略以及各执行机构控制律分别独立设计的并行工作结构。 这种工作结构泛用性强,设计灵活,是多执行机构复合控制领域中最常用的方法,也是当前的研究热点[66, 72-73]。
如图9所示,直/气并行工作方案根据实际控制指令,先通过复合控制器得到整个系统的需用控制量,比如根据攻角指令得到需用力矩,再依据控制分配策略,将需用控制量分配到直接力和气动力两种执行机构,最后由这两种执行机构共同实现系统的需用控制量[74]。
基于并行方案的直/气复合控制系统可分为复合控制器和控制分配两部分,在此基础上,设计者可以分别设计控制器与控制分配策略,即保留控制器结构,再通过将所需控制量分配给直接力控制和气动力控制分别实现[34, 73-74]。 现有研究成果说明,控制分配是并行工作结构的多执行机构复合控制的核心,控制分配策略的优劣会严重影响系统的控制效率[34, 75-76]。
控制分配策略是并行工作方案的核心,根据控制分配策略中是否有实时考虑执行机构的特性,分为静态控制分配和动态控制分配。
a. 静态控制分配
静态控制分配没有考虑执行机构特性,但相对动态控制分配计算量小。 常见的静态分配方法包括直接分配法[41, 73, 77]、链式递增分配法[78]、线性规划分配法[79]和智能算法[39]。
直接分配法基于某一指标给出一个执行机构选择方案;链式递增分配法按照一定次序使用控制量,并以饱和为控制量更换条件。 在直/气复合控制中,一般将气动力控制作为主控制量,直接力控制作为次控制量,当主控制量饱和后,启用次控制量。 直接分配法和链式递增分配法都是基于某种规则的静态控制分配方法,具有计算量小、设计简单、直观、可以弹上实时解算的优势,但不能发挥直/气复合控制的最大性能。 线性规划分配法和智能算法则属于优化方法,利用优化算法获得性能指标函数的最优解,设计灵活,可以实现各种复杂约束,相较于前两者控制性能更好,但往往具有计算量大,需要离散规划、在线匹配的特点。
动压由大气密度和飞行速度共同决定,能够有效评估执行机构效能,是设计直接分配法中最常见的依据,文献[41,73,77]均以动压作为标准,设计控制分配规则。 文献[41]根据实际的飞行包线和任务需求确定了动压分界面,提出了五段控制模式,并詳细规定了每段控制模式的执行机构。 文献[73]采用并行工作结构,基于神经网络滑模控制方法设计复合控制器,然后,根据动压实时分配气动舵与发动机需要提供的控制力矩。 文献[77]以动压为依据设计了直接侧向力控制向气动力控制的过渡函数的权重系数。 文献[78]以链式递增分配策略分配力矩,配合二次规划的气动面和整数线性规划的RCS,以求减小执行机构的能量消耗。 文献[39]基于自适应遗传算法设计了控制分配策略。 文献[79]在考虑位置和速度约束的情况下,基于线性规划设计了一种优化控制分配方法,将控制指令分配给各执行机构。
b. 动态控制分配
文献[44,80-81]中指出,多数研究的控制分配策略属于静态分配,其本质是一个开环系统,没有考虑不同执行机构作用到被控对象后的动态特性差异。 因此,动态控制分配在静态控制分配的基础上引入过载偏差、旋转角速度等状态及系统动态特性考虑,实现系统闭环。 相较于静态控制分配,基于动态控制分配的直/气复合控制系统性能更优,但动态控制分配过程计算量更大,测试状态量更多,测量精度要求更高,工程应用中难以实现。
文献[82]针对执行机构动态特性变化问题,采用模糊自适应分配方法设计了控制分配策略。 文献[34]基于被约束的二次型规划的动态控制分配方法,将控制力矩分配给气动力和直接侧向力执行机构。 文献[33]基于并行工作结构设计复合控制系统,采用固定时间滑模控制方法设计复合控制器,基于二次规划的动态最优方法设计控制分配策略。 该方法在分配过程中考虑了执行机构的动态响应,以求得到更精确的分配结果。 文献[80]基于约束二次规划设计了一种基于当前时刻控制需求和前一采样时刻控制输入的动态控制分配方法。
4.3 脉冲发动机点火算法
脉冲发动机的位置受到弹体结构和安装工艺的限制,只能提供特定方向的直接力,在控制受限的情况下设计点火算法,尽可能实现需用控制力,是直接力控制的难点和核心之一。 点火算法的优劣直接影响直接力的控制效果,决定了被控对象的机动性、快速性和精确度。
脉冲发动机的点火算法需要依据点火喷口的分布设计,如图3~4所示,脉冲发动机的安装方案可分为两种:均匀分布一圈或数圈安装脉冲发动机,多用于旋转的轴对称被控对象,如旋转导弹;针对俯仰、偏航、滚转三通道控制分别安装脉冲发动机,适用于三通道可以解耦设计的被控对象。 脉冲发动机由于其位置限制,不能提供任意方向的直接力。 因此,需要设计点火算法,规划脉冲发动机的点火喷口,尽可能精确地实现控制指令要求的直接力;同时,减少脉冲发动机的消耗,避免抖振、反喷等问题。
设计点火算法前,首先需要根据拦截器的控制方式及脉冲发动机的分布确定适合的点火方式。 从原理看,脉冲发动机点火方式主要有区域点火和推力矢量合成点火两种。
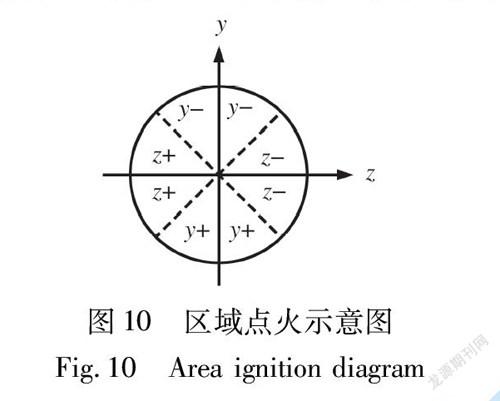
(1) 区域点火
区域控制发动机点火如图10所示,位于y-和y+位置的发动机控制被控对象的纵向/俯仰通道机动,位于z-和z+位置的发动机控制被控对象的侧向/偏航通道机动。 发动机点火后提供相反方向的推力,所以,点燃上方的位于y-方向的发动机,可以提供y轴负向的直接力。 其余区域同理。 此外,由于脉冲发动机安装位置限制和被控对象的滚转运动,脉冲发动机提供的直接力实际方向很难与期望方向完全重合,偏差部分一般视为干扰。
文献[83-84]基于区域点火方式设计了点火算法。 文献[83]将俯仰和偏航通道解耦,在弹头配置两组共四台姿控发动机,分别控制俯仰通道和偏航通道。 文献[84]每圈安装18个姿控脉冲发动机,分为正、负俯仰和正、负偏航四个控制区。
区域点火方式计算简单,但没有考虑通道间的耦合,容易造成脉冲发动机的浪费。 基于其特性,区域点火适用于滚转通道运动较小,即各通道耦合不严重的被控对象。
(2) 推力矢量合成点火
在脉冲发动机工作的一个周期内,若被控对象存在滚转运动,则直接力扫过一个扇形区域,最终提供一个矢量合成力,如图11所示。 当工作的脉冲发动机随着被控对象的旋转由A点运动到B点,最终得到合成的直接力F,F的方向在A,B两点提供的直接力间,F的大小根据矢量合成原理计算。 同时启动多个位置的脉冲发动机也是同理。 按照矢量合成的原理即可计算最终作用的直接力;反之,可通过最终期望获得的直接力,反向计算点火脉冲发动机的位置和数量。
文献[28,85-89]基于推力矢量合成点火方式设计了点火算法。 基于推力矢量点火方式的点火算法有三种设计思路:根据脉冲发动机安装位置与需用直接力的几何关系[28, 85-87];控制被控对象滚转通道[88];利用优化算法[89]。 文献[85]建立了简化的脉冲发动机的数学模型,根据数学模型及各通道需用直接力的几何关系,设计了一种基于单纯形的点火算法。 文献[28]在旋转导弹头部安装了10圈脉冲发动机,每圈均匀分布16个姿控脉冲发动机,根据所需直接力的方向就近选择一个脉冲发动机点火。 文献[86]基于极坐标的形式设计点火算法,并规定了姿控脉冲发动机的启动顺序:按照距离质心的远近,从远到近使用。 文献[87]通过单个点火或组合点火脉冲发动机产生直接力,设计了脉冲发动机点火个数确定及点火序号选择策略。 文献[88]优化了弹体滚转角速度,基于直接力的动态响应设计了滚转扇扫点火偏差补偿算法。 文献[89]将点火算法转化为0-1规划问题,基于贪心算法对该问题进行了快速近似求解。 为了在确保精度的前提下减少脉冲发动机的消耗,基于几何关系设计点火算法的方式具有计算量小且不需要控制被控对象滚转通道的优势,在工程应用中最为广泛。
虽然不可避免地存在期望控制力与实际控制力方向的偏差,但相较于区域点火,推力矢量合成点火的控制力方向准确度更高,对脉冲发动机造成的浪费更小,但要求脉冲发动机以一圈或数圈的形式均匀分布,每圈分布的脉冲发动机喷口越多,提供的控制力方向越準确。 考虑到单个脉冲发动机无法重复使用的特性,推力矢量合成点火一般用于轴对称的滚转被控对象,在滚转过程中脉冲发动机相对空间方向一直变化,避免了由于发动机耗尽无法提供特定方向直接力的问题。
5 直/气复合控制的展望
直/气复合控制主要应用于对飞行器性能、命中精度、响应速度等要求较高的情况,面临着异类执行机构组合导致的模型复杂、大气环境稠密变化大导致的飞行阶段复杂、执行机构控制受限严重等问题,给其制导控制系统设计带来了困难和挑战。 为了在实际工程问题下发挥直/气复合控制的最大性能,为相关工程应用提供理论指导,基于现有的研究现状,仍有以下问题等待完善:
(1) 多输入混合异构控制系统建模
由于直接力、气动力控制量特性不同,直/气复合控制系统本质上是一种多输入混合异构控制系统,多控制量之间的协调直接影响复合控制系统性能。 现有研究为了便于设计,采用分别设计直接力控制系统、气动力控制系统的策略,再依据规则或优化策略将二者组合。 这种方法没有将多执行机构复合系统视为统一的多输入系统,导致异类控制量配合时存在一定的损耗,不能实现复合控制的最大性能,且忽略了执行机构间的相互作用,对复合控制的多输入特性缺乏理论分析和深入研究。
直/气复合控制系统的多输入控制量形式与执行机构配置紧密相关。 为发挥多执行机构协调的最大性能,考虑将直/气复合控制系统视为多输入系统进行设计研究;另一方面,多输入复合控制系统设计方法具有较强的泛用性,可以在统一的控制框架下结合具体的执行机构配置方案实现复合控制,更便于工程应用。
(2) 直/气复合控制稳定性分析
异构执行机构导致了连续/离散耦合问题,现有研究在直/气复合控制模型中考虑了气动力的连续特性和直接力的离散特性,但在稳定性分析方面尚缺乏相关研究。 后续研究中,可以考虑在选取稳定性分析的李雅普诺夫函数时将连续控制量与离散控制量相结合。
(3) 直/气复合控制系统容错
直接力执行机构配置方式灵活多样,且其工作特性与气动舵有较大差异。 现有容错方法大多基于传统的气动控制设计,对于直/气复合控制,尤其是直接力控制的容错方法关注较少。
后续研究中可以考虑设计点火算法容错策略,在有脉冲发动机故障的情况下,通过调整点火脉冲发动机喷口位置或推力大小,灵活地补偿故障脉冲发动机应提供的直接力。
(4) 直/气复合系统制导控制一体化
直接力的作动器脉冲发动机由于安装位置不同,存在力矩控制和力控制两种工作形式,其中,力控制可以为被控对象提供加速度,效果直接作用于其飞行弹道,造成制导控制系统的耦合。 传统的制导控制系统设计通常采用分别设计制导系统和控制系统的方式,令控制系统跟踪制导系统生成制导指令,使控制系统嵌入到制导系统中。 制导控制一体化设计方法作为传统方法的改进和替代,不再区分制导系统或控制系统,而是将其作为一个整体考虑,根据测量信息与被控对象本身的状态直接产生控制指令,减少制导控制系统耦合造成的控制偏差,在兼顾传统制导控制系统性能的同时,提高整体的制导品质,具有更快的响应速度和更高的命中精度,能够进一步增强直/气复合控制系统的机动性和快速性。 然而,一体化设计通常面临着系统阶数较高的问题,其在直/气复合制导控制方面的应用还有待后续的深入探索。
(5) 直/气复合控制系统的能量控制
气动舵本质上属于舵机,提供连续的控制量,且不需要消耗燃料;直接力执行机构本质属于发动机,需要通过燃烧燃料获得直接推力。 因此,在使用直接力时需要考虑能量控制问题,即如何在消耗尽可能少的燃料的情况下完成控制任务。
现有直/气复合控制领域的研究在能量控制方面的成果较少且缺乏系统性,未来可以考虑从执行机构选择策略、执行机构配置优化、直/气复合控制系统的智能化能量控制等方面入手,研究直/气复合控制系统的能量控制方法,提高燃料的利用效率。 另外,需用燃料的多少是评估直/气复合控制系统效能的重要指标,在工程应用中备受关注,后续研究可以基于能量控制提出直/气复合控制系统的评估指标,为工程实践中的执行机构配置提供理论指导。
除此之外,直接力控制的典型执行机构脉冲发动机在开关状态切换时可能引起抖振,导致能量的浪费,在后续研究中可以考虑对此进行针对性的优化。
6 总 结
相对于传统的纯气动控制系统,直/气复合控制系统能够显著提升被控对象的机动性和快速性,多用于对系统响应速度、机动能力有较高要求的应用场景中。 然而,直/气复合控制系统属于包含多输入的混合异构执行机构组合系统,导致其在建模、制导控制方法、稳定性分析等方面都存在一定的困难。
在对直/气复合控制方式及执行机构进行概述的基础上,对直/气复合系统国内外研究现状进行了综述,并分析了直/气复合系统中的关键技术,可得到结论如下:
(1) 在直/气复合控制系统建模中将直接力简化为连续控制量,便于在控制系统中使用各种复杂控制方法,但这种假设在工程应用中存在较大限制,无法实现。 若尽可能在直/气复合系统建模中体现直接力的工作特性,则给后续设计带来了极大的挑战。
(2) 采用控制量并行模式可以将复合控制系统分为复合控制器和控制分配两部分独立进行设计,具有泛用性强、设计灵活的优势,是现有研究中最常用的模式。 并行模式下控制器设计与一般的纯气动控制系统相同,而根据被控对象的作动器特点、使用环境、计算能力、任务需求等设计的控制分配策略则是此模式的核心,直接影响最终的控制效果。
(3) 脉冲发动机作为应用最广泛的直接力执行机构,具有工作时间受限、推力大小受限、安装位置受限、数量有限等控制受限问题。 结合上述控制受限问题以及脉冲发动机启控方式,基于需用直接力方向和脉冲发动机几何关系、控制滚转通道、利用优化算法来设计点火算法。
参考文献:
[1] Hong J H, Lee C H. Nonlinear Autopilot Design for Endo-and Exoatmospheric Interceptor with Thrust Vector Control[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(1): 796-810.
[2] Kim S, Cho D, Kim H J. Force and Moment Blending Control for Fast Response of Agile Dual Missiles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(2): 938-947.
[3] Yeh F K, Cheng K Y, Fu L C. Variable Structure-Based Nonlinear Missile Guidance/Autopilot Design with Highly Maneuverable Actua-tors[J]. IEEE Transactions on Control Systems Technology, 2004, 12(6): 944-949.
[4] Hahn P V, Frederick R A, Slegers N. Predictive Guidance of a Projectile for Hit-to-Kill Interception[J]. IEEE Transactions on Control Systems Technology, 2009, 17(4): 745-755.
[5] 沈昭烈, 吴震. 空空导弹推力矢量控制系统[J]. 战术导弹控制技术, 2002(2): 1-6.
Shen Zhaolie, Wu Zhen. Air-to-Air Missile Thrust Vector Control System[J]. Tactical Missile Control Technology, 2002(2): 1-6. (in Chinese)
[6] Na H, Lee J I. Optimal Arrangement of Missile Defense Systems Considering Kill Probability[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(2): 972-983.
[7] 陳海建. 先进防空导弹关键技术分析及发展启示[J]. 现代防御技术, 2020, 48(4): 60-66.
Chen Haijian. Key Technology Analysis and Development Enligh-tenment of Advanced Air Defense Missile[J]. Modern Defence Technology, 2020, 48(4): 60-66.(in Chinese)
[8] 刘野, 袁欣, 张蕾. 美国多方位防御-快速拦截弹交战系统发展情况分析[J]. 飞航导弹, 2020(3): 1-4.
Liu Ye, Yuan Xin, Zhang Lei. Development Analysis of the U S Multi-Directional Defense-Rapid Interceptor Engagement System [J]. Aerodynamic Missile Journal, 2020(3): 1-4.(in Chinese)
[9] Zhang Y A, Wu H L, Liu J M, et al. A Blended Control Strategy for Intercepting High-Speed Target in High Altitude[J]. Journal of Aerospace Engineering, 2018, 232(12): 2263-2285.
[10] Yeh F K. Adaptive-Sliding-Mode Guidance Law Design for Missiles with Thrust Vector Control and Divert Control System[J]. IET Control Theory & Applications, 2012, 6(4): 552.
[11] Yeh F K, Chien H H, Fu L C. Design of Optimal Midcourse Guidance Sliding-Mode Control for Missiles with TVC[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(3): 824-837.
[12] 李权. 导弹直接侧向力与气动力复合控制系统分析与设计方法[D]. 哈尔滨: 哈尔滨工业大学, 2014.
Li Quan. Performance Analysis and Autopilot Design for a Missile with Blended Lateral Thrust and Aerodynamic Force[D]. Harbin: Harbin Institute of Technology, 2014. (in Chinese)
[13] 李玉林, 杨树兴. 先进防空导弹直接力/气动力复合控制关键技术分析[J]. 兵工学报, 2007, 28(12): 1523-1527.
Li Yulin, Yang Shuxing. Key Technology Analysis of Blended Control Caused by Lateral/Aerodynamic Forces for Air Defense Missile[J]. Acta Armamentarii, 2007, 28(12): 1523-1527. (in Chinese)
[14] 徐敏. 大气层内拦截弹侧向喷流控制技术研究[D]. 西安: 西北工业大学, 2003.
Xu Min. Studies of Lateral Jet Control on Endoatmospheric Interceptor[D]. Xi’an: Northwestern Polytechnical University, 2003. (in Chinese)
[15] Liu L J, Zhu C H, Yu Z, et al. Guidance and Ignition Control of Lateral-Jet-Controlled Interceptor Missiles[J]. Journal of Gui-dance, Control, and Dynamics, 2015, 38(12): 2455-2460.
[16] Choi K, Lee S, Oh K, et al. Numerical Investigation of Jet Interactions for a Lateral Thrust Jet Controlled Interceptor Operating at Medium Altitudes[J]. International Journal of Aeronautical and Space Sciences, 2020, 21(1): 39-49.
[17] 廖新华. 美利坚神箭——爱国者PAC-3反导拦截系统终极报告[J]. 国际展望, 2006(18): 28-35.
Liao Xinhua. America’s Arrow: Patriot PAC-3 Anti-Missile Interceptor System Final Report [J]. World Outlook, 2006(18): 28-35.(in Chinese)
[18] 雍恩米, 趙良玉, 赵暾. 萨德导弹拦截防御作战弹道设计与仿真分析[J]. 空天防御, 2020, 3(2): 65-71.
Yong Enmi, Zhao Liangyu, Zhao Tun. Design and Simulation of THAAD Missile Defence Trajectory[J]. Air & Space Defense, 2020, 3(2): 65-71.(in Chinese)
[19] 特日格乐, 王楠楠, 姚源, 等. 美国X-37B发展情况简析[J]. 中国航天, 2020(4): 37-40.
Terigele, Wang Nannan, Yao Yuan, et al. A Review on US Air Force X-37B Vehicle[J]. Aerospace China, 2020(4): 37-40.(in Chinese)
[20] 孙宗祥, 唐志共, 陈喜兰, 等. X-37B的发展现状及空气动力技术综述[J]. 实验流体力学, 2015, 29(1): 1-14.
Sun Zongxiang, Tang Zhigong, Chen Xilan, et al. Review of the State-of-Art and Aerodynamic Technology of X-37B[J]. Journal of Experiments in Fluid Mechanics, 2015, 29(1): 1-14.(in Chinese)
[21] 李欣. 国际第四代中程防空导弹特性分析[J]. 中国新技术新产品, 2019(6): 15-16.
Li Xin. Characterization of International Fourth-Generation Me-dium-Range Air Defense Missiles [J]. New Technology & New Products of China, 2019(6): 15-16.(in Chinese)
[22] 梁栋, 宋建梅, 蔡高华. 高速飞行器直接力/气动力复合控制技术综述[J]. 航空兵器, 2013(4): 15-19.
Liang Dong, Song Jianmei, Cai Gaohua. Survey of Compound Control Methods of Reaction Thrust and Aerodynamic Fin of Flight Vehicle[J]. Aero Weaponry, 2013(4): 15-19.(in Chinese)
[23] 肖科, 雷虎民, 张维刚, 等. 防空导弹直接侧向力与气动力复合控制技术综述[J]. 飞航导弹, 2013(1): 72-77.
Xiao Ke, Lei Humin, Zhang Weigang, et al. Review of Composite Control Technology of Air Defense Missile Direct Lateral Force and Aerodynamic Force [J]. Aerodynamic Missile Journal, 2013(1): 72-77.(in Chinese)
[24] Aydin A T. Orbit Selection and EKV Guidance for Space-Based ICBM Intercept[EB/OL]. (2005-09-01)[2021-07-12]. https:∥core.ac.uk/download/pdf/36695751.pdf.
[25] 纪彦宇. 直/气复合控制拦截弹控制策略研究[D]. 哈尔滨: 哈尔滨工业大学, 2018.
Ji Yanyu. Research on Control & Strategy Method of Side-Jet & Aerodynamic Fins Compound of Interceptor Missile[D]. Harbin: Harbin Institute of Technology, 2018. (in Chinese)
[26] 战略前沿技术. 空空导弹技术未来发展方向展望[EB/OL].(2021-06-29)[2021-07-12]. https:∥mp.weixin.qq.com/s/ 3EgVGSoX09qAUqYeN7 EP0A.
Strategic Frontier Technology. Future Development of Air-to-Air Missile Technology[EB/OL]. (2021-06-29)[2021-07-12]. https:∥ mp.weixin.qq.com/s/3EgVGSoX09qAUqYeN7 EP0A.(in Chinese)
[27] 刘海霞. 法意联合研制系列化防空导弹[J]. 中国航天, 2001(3): 32-34.
Liu Haixia. France and Italy Jointly Develop Series of Air Defense Missiles [J]. Aerospace China, 2001(3): 32-34.(in Chinese)
[28] 邹勇, 刘钧圣, 马骏, 等. 基于脉冲推力/气动力复合控制的高速动能导弹控制方法研究[J]. 弹箭与制导学报, 2019, 39(1): 65-68.
Zou Yong, Liu Junsheng, Ma Jun, et al. Compound Control with Pulse Thrust and Aerodynamic Force for Kinetic Energy Missile[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2019, 39(1): 65-68.(in Chinese)
[29] 邵春涛, 周荻. 大气层内拦截弹采样系统H∞混合灵敏度设计[J]. 系统工程与电子技术, 2009, 31(5): 1138-1141.
Shao Chuntao, Zhou Di. H-Infinity Mixed Sensitivity Design for Sampled-Data System of Endoatmospheric Interceptors[J]. Systems Engineering and Electronics, 2009, 31(5): 1138-1141.(in Chinese)
[30] Weil R D, Wise K A. Blended Aero and Reaction Jet Missile Autopilot Design Using VSS Techniques[C]∥30th IEEE Conference on Decision and Control, 1991: 2828-2829.
[31] Wise K A, Roy D J B. Agile Missile Dynamics and Control[J]. Journal of Guidance, Control, and Dynamics, 1998, 21(3): 441-449.
[32] Innocenti M, Thukral A. Simultaneous Reaction Jet and Aerodynamic Control of Missile Systems[C]∥Guidance, Navigation and Control Conference, 1993.
[33] 劉祥, 李爱军, 郭永, 等. 固定时间收敛的空空导弹直接力/气动力复合控制[J]. 哈尔滨工业大学学报, 2019, 51(9): 29-34.
Liu Xiang, Li Aijun, Guo Yong, et al. Fixed-Time Convergence Blended Control for Air-to-Air Missile with Lateral Thrusters and Aerodynamic Force[J]. Journal of Harbin Institute of Technology, 2019, 51(9): 29-34.(in Chinese)
[34] Guo Y, Guo J H, Liu X, et al. Finite-Time Blended Control for Air-to-Air Missile with Lateral Thrusters and Aerodynamic Surfaces[J]. Aerospace Science and Technology, 2020, 97: 105638.
[35] Zhou D, Shao C T. Dynamics and Autopilot Design for Endoatmospheric Interceptors with Dual Control Systems[J]. Aerospace Science and Technology, 2009, 13(6): 291-300.
[36] 郭建国, 张添保, 周军, 等. 可重复使用飞行器归一化复合控制系统设计[J]. 宇航学报, 2016, 37(6): 639-645.
Guo Jianguo, Zhang Tianbao, Zhou Jun, et al. Compound Control System Design for RLV Based on Normalization Method[J]. Journal of Astronautics, 2016, 37(6): 639-645.(in Chinese)
[37] Thukral A, Innocenti M. A Sliding Mode Missile Pitch Autopilot Synthesis for High Angle of Attack Maneuvering[J]. IEEE Tran-sactions on Control Systems Technology, 1998, 6(3): 359-371.
[38] 董朝阳, 王枫, 高晓颖, 等. 基于自适应滑模与模糊控制的导弹直接力/气动力复合控制系统优化设计[J]. 航空学报, 2008, 29(1): 165-169.
Dong Chaoyang, Wang Feng, Gao Xiaoying, et al. Missile Reaction-Jet/Aerodynamic Compound Control System Design Based on Adaptive Sliding Mode Control and Fuzzy Logic[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(1): 165-169.(in Chinese)
[39] 史震, 马文桥, 王飞, 等. 直接力/气动力复合控制导弹智能控制算法[J]. 南京理工大学学报, 2014, 38(4): 481-489.
Shi Zhen, Ma Wenqiao, Wang Fei, et al. Intelligent Control Algorithm for Missile with Lateral Jets and Aerodynamic Surfaces[J]. Journal of Nanjing University of Science and Technology, 2014, 38(4): 481-489.(in Chinese)
[40] 闫亮, 段朝阳, 张公平, 等. 一种采用脉冲调制器的空空导弹直/气复合控制系统稳定性研究[J]. 导航定位与授时, 2017, 4(1): 42-48.
Yan Liang, Duan Chaoyang, Zhang Gongping, et al. Research on the Stability of an Air-to-Air Missile Lateral Thrust and Aerodynamic Compound Control System with a Pulse Modulator[J]. Na-vigation Positioning and Timing, 2017, 4(1): 42-48.(in Chinese)
[41] 余光学, 程兴, 耿光有. RLV双环滑模RCS/气动舵复合控制器设计[J]. 宇航总体技术, 2018, 2(6): 42-49.
Yu Guangxue, Cheng Xing, Geng Guangyou. A RLV Dual-Loop Sliding Mode RCS/Aerosurfaces Compound Controller Design[J]. Astronautical Systems Engineering Technology, 2018, 2(6): 42-49.(in Chinese)
[42] 金一歡, 冯昊, 林俊, 等. 基于自适应高阶滑模的直气复合控制律设计[J]. 空间控制技术与应用, 2020, 46(1): 31-36.
Jin Yihuan, Feng Hao, Lin Jun, et al. Adaptive Continuous Higher Order Sliding Mode Control for Dual Aero/Propulsive Missile[J]. Aerospace Control and Application, 2020, 46(1): 31-36.(in Chinese)
[43] 邵春涛, 周荻. 大气层内拦截弹脉冲发动机消耗量离线计算[J]. 航天控制, 2009, 27(4): 57-61.
Shao Chuntao, Zhou Di. Off-Line Calculation for Consumed Impulse Thrusters of Endoatmospheric Interceptors[J]. Aerospace Control, 2009, 27(4): 57-61.(in Chinese)
[44] 杨宝庆, 马杰, 姚郁, 等. 基于预测控制的直接侧向力气动力复合控制方法研究[J]. 系统科学与数学, 2010, 30(6): 816-826.
Yang Baoqing, Ma Jie, Yao Yu, et al. Blended Control Method with Lateral Thrust and Aerodynamic Force Based on Predictive Control[J]. Journal of Systems Science and Mathematical Sciences, 2010, 30(6): 816-826.(in Chinese)
[45] 马克茂, 赵辉, 张德成. 导弹直接侧向力与气动力复合控制设计与实现[J]. 宇航学报, 2011, 32(2): 310-316.
Ma Kemao, Zhao Hui, Zhang Decheng. Control Design and Implementation for Missiles with Blended Lateral Jets and Aerodynamic Control Systems[J]. Journal of Astronautics, 2011, 32(2): 310-316.(in Chinese)
[46] Ashrafiuon H. Guidance and Attitude Control of Unstable Rigid Bodies with Single-Use Thrusters[J]. IEEE Transactions on Control Systems Technology, 2017, 25(2): 401-413.
[47] 赵明元, 魏明英, 何秋茹. 基于有限时间稳定和Backstepping的直接力/气动力复合控制方法[J]. 宇航学报, 2010, 31(9): 2157-2164.
Zhao Mingyuan, Wei Mingying, He Qiuru. Research on Method of Lateral Jet and Aerodynamic Fins Compound Control Based on Finite Time Stability and Backstepping Approach[J]. Journal of Astronautics, 2010, 31(9): 2157-2164.(in Chinese)
[48] 姚郁, 毕永涛. 姿控式直接侧向力与气动力复合控制策略设计[J]. 航空学报, 2010, 31(4): 701-708.
Yao Yu, Bi Yongtao. Design of Blended Control Strategy for Missiles with Lateral Jets and Aerodynamic Surfaces[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(4): 701-708.(in Chinese)
[49] 马克茂, 赵辉. 一类多执行机构系统的滑模控制设计及其应用[J]. 控制理论与应用, 2011, 28(4): 556-560.
Ma Kemao, Zhao Hui. Sliding Modes Control Design for a Class of Systems with Multiple Actuators and Its Applications[J]. Control Theory & Applications, 2011, 28(4): 556-560.(in Chinese)
[50] 周荻, 邵春涛. 大气层内拦截弹直接侧向力/气动力混合控制系统设计[J]. 宇航学报, 2007, 28(5): 1205-1209.
Zhou Di, Shao Chuntao. Hybrid Control System Design for an Atmospheric Interceptor Controlled by Lateral Jet Thrusters and Aerodynamic Surfaces[J]. Journal of Astronautics, 2007, 28(5): 1205-1209.(in Chinese)
[51] 杨彦广. 高超声速主流中的横向喷流干扰效应研究[D]. 绵阳: 中国空气动力研究与发展中心, 2003.
Yang Yanguang. Study of Transverse Jet Interference Effects in the Hypersonic Mainstream[D]. Mianyang: China Aerodynamics Research and Development Center, 2003. (in Chinese)
[52] 劉君, 杨彦广. 带有横喷控制的导弹非定常流场数值模拟[J]. 空气动力学学报, 2005, 23(1): 25-28.
Liu Jun, Yang Yanguang. Numerical Simulation of Lateral Jet Control Induced by Impulse Rocket Motor for a Supersonic Missile[J]. Acta Aerodynamica Sinica, 2005, 23(1): 25-28.(in Chinese)
[53] 白涛涛, 曹军伟, 王虎干, 等. 有/无尾喷流效应影响的导弹侧向喷流干扰数值研究[J]. 航空兵器, 2020, 27(3): 83-87.
Bai Taotao, Cao Junwei, Wang Hugan, et al. Numerical Investigation on Interactions of Lateral Jet with/without Plume for Missiles[J]. Aero Weaponry, 2020, 27(3): 83-87.(in Chinese)
[54] 張友安, 吴华丽, 梁勇. 考虑复合控制系统动态特性的前向拦截制导律[J]. 宇航学报, 2015, 36(2): 158-164.
Zhang You’an, Wu Huali, Liang Yong. Head Pursuit Guidance Law Considering Dynamic Characteristic of Hybrid Control System[J]. Journal of Astronautics, 2015, 36(2): 158-164.(in Chinese)
[55] 李陟, 魏明英, 周荻. 防空导弹直接侧向力/气动力复合控制技术[M]. 北京: 中国宇航出版社, 2012.
Li Zhi, Wei Mingying, Zhou Di. Direct Lateral Force/Aerodynamic Composite Control Technology for Air Defense Missile [M]. Beijing: China Aerospace Publishing House, 2012.(in Chinese)
[56] 何文敏, 李实, 向峥嵘. 切换非线性系统采样控制的研究现状与进展[J]. 信息与控制, 2020, 49(2): 129-138.
He Wenmin, Li Shi, Xiang Zhengrong. Research Status and Progress in Sampled-Data Control for Switched Nonlinear Systems[J]. Information and Control, 2020, 49(2): 129-138.(in Chinese)
[57] Liberzon D, Tempo R. Common Lyapunov Functions and Gradient Algorithms[J]. IEEE Transactions on Automatic Control, 2004, 49(6): 990-994.
[58] Peleties P, DeCarlo R. Asymptotic Stability of M-Switched Systems Using Lyapunov-Like Functions[C]∥American Control Conference, 1991.
[59] Hespanha J P, Morse A S. Stability of Switched Systems with Ave-rage Dwell-Time[C]∥38th IEEE Conference on Decision and Control,1999.
[60] Morse A S. Supervisory Control of Families of Linear Set-Point Controllers[J].IEEE Transactions on Automatic Control,1997: 1500-1515.
[61] Zong G D, Wu Y Q. Exponential Stability of a Class of Switched and Hybrid Systems[C]∥ 8th Control, Automation, Robotics and Vision Conference, 2004.
[62] 凡国龙, 梁晓庚, 杨军. 直接侧向力/气动力复合控制系统稳定性分析[J]. 计算机仿真, 2011, 28(6): 96-100.
Fan Guolong, Liang Xiaogeng, Yang Jun. Stability Analysis of Reaction-Lateral-Jet / Aerodynamic Complex Control System[J]. Computer Simulation, 2011, 28(6): 96-100.(in Chinese)
[63] 管再升, 阮文华, 刘伟, 等. 轨控推力矢量技术在防空导弹上的应用研究[J]. 空天防御, 2020, 3(2): 1-7.
Guan Zaisheng, Ruan Wenhua, Liu Wei, et al. Study of Trajectory-Controlled Thrust Vector Technology Application in Air Defense Missile[J]. Air & Space Defense, 2020, 3(2): 1-7.(in Chinese)
[64] Lin I F, Huang C I, Fu L C. Flight Controller Design for Intercepting Missiles with Multiple TVC Systems and DCS[C]∥American Control Conference, 2007.
[65] Ridgely D, Drake D, Triplett L, et al. Dynamic Control Allocation of a Missile with Tails and Reaction Jets[C]∥AIAA Gui-dance, Navigation and Control Conference and Exhibit, 2007.
[66] 董添, 赵长见, 宋志国. 直接力/气动力复合控制系统设计方法研究[J]. 导弹与航天运载技术, 2019(3): 58-62.
Dong Tian, Zhao Changjian, Song Zhiguo. A Survey on Compound Control System Design for Aircraft with Lateral Thrusters and Aerodynamic Fins[J]. Missiles and Space Vehicles, 2019(3): 58-62.(in Chinese)
[67] 胥彪, 周荻. 受输入饱和约束的导弹直接侧向力/气动力复合控制[J]. 宇航学报, 2012, 33(11): 1630-1635.
Xu Biao, Zhou Di. Dual Aero/Propulsive Missile Control Subject to Input Saturation[J]. Journal of Astronautics, 2012, 33(11): 1630-1635.(in Chinese)
[68] 刘凯, 宋晓娜, 刘跃敏. 导弹复合控制系统的切换控制器设计[J]. 电光与控制, 2017, 24(7): 33-36.
Liu Kai, Song Xiaona, Liu Yuemin. Switching Controller Design for Missile Compound Control System[J]. Electronics Optics & Control, 2017, 24(7): 33-36.(in Chinese)
[69] 王宏利. 导弹复合控制系统切换控制方法[D]. 哈尔滨: 哈尔滨工业大学, 2010.
Wang Hongli. Switching Control for Blended Controled Missiles[D]. Harbin: Harbin Institute of Technology, 2010. (in Chinese)
[70] 周锐, 高晓颖. 导弹复合控制系统的多目标优化设计[J]. 航天控制, 2007, 25(2): 9-12.
Zhou Rui, Gao Xiaoying. Blended Control System Design of Missile with Aerodynamic Fin and Side Thruster Using Multi-Objective Optimization[J]. Aerospace Control, 2007, 25(2): 9-12.(in Chinese)
[71] Hirokawa R, Sato K, Manabe S. Autopilot Design for a Missile with Reaction-Jet Using Coefficient Diagram Method[C]∥AIAA Guidance, Navigation, and Control Conference and Exhibit, 2001.
[72] Johansen T A, Fossen T I. Control Allocation-A Survey[J]. Automatica, 2013, 49(5): 1087-1103.
[73] 李愛军, 王瑜, 郭永, 等. 空天飞行器姿态直接力/气动力复合控制[J]. 西北工业大学学报, 2019, 37(3): 532-540.
Li Aijun, Wang Yu, Guo Yong, et al. Attitude Blended Control for Aerospace Vehicle with Lateral Thrusters and Aerodynamic Fins[J]. Journal of Northwestern Polytechnical University, 2019, 37(3): 532-540.(in Chinese)
[74] Liu Y, Gao Z H, Shang C Y. Control Allocation for an Over-Actuated Aircraft Based on Within-Visual-Range Air Combat Agility[J]. IEEE Access, 2018, 6: 14668-14675.
[75] Yang P F, Fang Y W, Chai D, et al. Fuzzy Control Strategy for Hypersonic Missile Autopilot with Blended Aero-Fin and Lateral Thrust[J]. Journal of Systems and Control Engineering, 2016, 230(1): 72-81.
[76] Ridgely D, Drake D, Triplett L, et al. Dynamic Control Allocation of a Missile with Tails and Reaction Jets[C]∥AIAA Gui-dance, Navigation and Control Conference and Exhibit, 2007.
[77] 宁国栋, 张曙光, 方振平. 跨大气层飞行器再入段RCS控制特性[J]. 飞行力学, 2005, 23(3): 16-20.
Ning Guodong, Zhang Shuguang, Fang Zhenping. Research on the Reaction Control System for Spacecraft Re-Entry Flight[J]. Flight Dynamics, 2005, 23(3): 16-20.(in Chinese)
[78] 贺成龙, 陈欣, 杨一栋. 一种动态逆解算的RLV混合规划控制分配研究[J]. 系统工程与电子技术, 2010, 32(9): 1973-1976.
He Chenglong, Chen Xin, Yang Yidong. Mixed Programming Control Allocation for Reusable Launch Vehicles Using Dynamic Inverse Calculating[J]. Systems Engineering and Electronics, 2010, 32(9): 1973-1976.(in Chinese)
[79] Zang X H, Tang S. Combined Feedback Linearization and Sliding Mode Control for Reusable Launch Vehicle Reentry[C]∥12th International Conference on Control Automation Robotics & Vision (ICARCV), 2012.
[80] Hrkegrd O. Dynamic Control Allocation Using Constrained Quadratic Programming[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(6): 1028-1034.
[81] Gai W D, Liu J, Zhang J, et al. A New Closed-Loop Control Allocation Method with Application to Direct Force Control[J]. International Journal of Control, Automation and Systems, 2018, 16(3): 1355-1366.
[82] 周锐, 王军. 导弹气动力/直接力自适应控制分配及优化设计[J]. 航空学报, 2007, 28(1): 187-190.
Zhou Rui, Wang Jun. Adaptive Control Allocation between Aerodynamic Fin and Side Thruster and Controller Design Using Multi-Objective Optimization[J]. Acta Aeronautica et Astronautica Sinica, 2007, 28(1): 187-190.(in Chinese)
[83] 马文桥. 直接力/气动力复合控制导弹几个问题研究[D]. 哈尔滨: 哈尔滨工程大学, 2014.
Ma Wenqiao. Investigations on Some Problems of Missile with La-teral Jet and Aerodynamic Surfaces[D]. Harbin: Harbin Engineering University, 2014. (in Chinese)
[84] 畢永涛. 直/气复合控制导弹制导控制问题研究[D]. 哈尔滨: 哈尔滨工业大学, 2010.
Bi Yongtao. Research on Guidance and Control for Missile with Lateral Jets and Aerodynamic Surfaces[D]. Harbin: Harbin Institute of Technology, 2010. (in Chinese)
[85] 于喜河, 单家元, 刘藻珍. 基于脉冲推力控制的超高速动能导弹控制算法设计[J]. 战术导弹控制技术, 2006(1): 14-17.
Yu Xihe, Shan Jiayuan, Liu Zaozhen. An Algorithm Design for Hyper-Velocity Kinetic Missile Based on Micro-Pulsed Propeller[J]. Tactical Missile Control Technology, 2006(1): 14-17. (in Chinese)
[86] 沈明辉, 陈磊, 吴瑞林, 等. 大气层内动能拦截弹脉冲矢量发动机点火控制算法研究[J]. 宇航学报, 2007, 28(2): 278-281.
Shen Minghui, Chen Lei, Wu Ruilin, et al. Investigation of Ignition Control Algorithm of the Pulse Vector Motors of the Endoatmospheric Kinetic Interceptor[J]. Journal of Astronautics, 2007, 28(2): 278-281.(in Chinese)
[87] 刘鹏云, 孙瑞胜, 李伟明. 复合控制火箭弹脉冲点火算法研究[J]. 弹道学报, 2012, 24(4): 27-30.
Liu Pengyun, Sun Ruisheng, Li Weiming. Algorithm Study on Impulse Ignition for Rocket with Compound Control[J]. Journal of Ballistics, 2012, 24(4): 27-30.(in Chinese)
[88] 董杰, 王法栋, 刘宗福. 大气层内动能拦截器微型脉冲发动机点火算法[J]. 导弹与航天运载技术, 2013(2): 46-49.
Dong Jie, Wang Fadong, Liu Zongfu. Ignition Algorithm of Micro Pulse Engines for the Endo-Atmosphere Kinetic Kill Vehicle[J]. Missiles and Space Vehicles, 2013(2): 46-49.(in Chinese)
[89] 杨锐, 徐敏, 陈士橹. 动能拦截弹姿控发动机组合点火算法研究[J]. 西北工业大学学报, 2006, 24(1): 15-18.
Yang Rui, Xu Min, Chen Shilu. An Approximate but Fast Combined Ignition Algorithm for Attitude Control Thrusters System(ACTS) of Kinetic Interceptor(KI)[J]. Journal of Northwestern Polytechnical University, 2006, 24(1): 15-18.(in Chinese)
[HJ*3][HJ][JZ(]Review on Development of Direct Force/Aerodynamic Force
Compound Control Technology
Guo Jianguo*,Peng Qian,Zhou Min
(Institute of Precision Guidance and Control,Northwestern Polytechnical University,Xi’an 710072,China)
[HT] Abstract:
The essence of direct force/aerodynamic force compound control is to improve the maneuverability and rapidity of controlled aircraft by using the fast response speed of direct force, which can effectively compensate the slow response of aerodynamic control caused by insufficient aerodynamic force. This paper describes the characteristics and key problems of ; direct force/aerodynamic force compound control system, and introduces the modeling method of direct force/aerodynamic force compound control system from three aspects: the configuration of engine, the existing research of direct force modeling at home and abroad, and the disturbance modeling of direct force control.The direct force/aerodynamic force compound control method is introduced from three aspects: the control method, the existing research of direct force/aerodynamic force compound control method at home and abroad, and the ignition algorithm of pulse engine. The feasible direct force/aerodynamic force compound system stability analysis method is given, the future development trend of direct force/aerodynamic force compound control is prospected, and its key technologies are summarized.
Key words: direct force;aerodynamic force;guidance and control system;direct lateral force;control distribution;pulse engine;ignition algorithm
收稿日期: 2021-07-13
基金項目: 国家自然科学基金项目(61973254;62003270)
作者简介: 郭建国(1975-), 男, 河南南阳人, 博士, 教授。