基于多组件并行架构的电力CPS实时联合仿真平台
2022-03-02万克厅陆玲霞于淼齐冬莲
万克厅,陆玲霞,于淼,齐冬莲
(浙江大学 电气工程学院,浙江 杭州 310027)
0 引言
随着电力系统中信息技术的不断发展与应用,传统电网已经逐步转型升级为电力拓扑与信息网络深度耦合、频繁交互的电力信息物理系统(cyber physical systems, CPS),信息侧或物理侧的单一仿真手段已无法满足电力CPS的仿真需求[1-2]。与此同时,电力CPS的网络安全及防御策略作为近年来的理论研究热点[3],其具体的实时仿真技术与攻击实现手段却鲜有文章提及。如针对电力CPS的虚假数据注入攻击与防御措施已在理论层面取得了一定成果[4-5],但其具体攻击的实现过程大多采取等效或简化处理,缺少在实际通信环境中的应用先例。因此,迫切需要提出一种新型的电力CPS仿真技术,能够在融合传统仿真手段的基础上精准模拟系统中的耦合机制与交互行为,同时具备基础的网络安全渗透测试功能,为电力CPS的理论研究提供精准高效的仿真平台与通用便捷的验证手段。
目前,电力CPS仿真技术的研究在国内外受到了广泛关注[6-9]。文献[6]总结了国内外电力与通信复合系统的主要研究方案,详细介绍了3种主流的仿真思路,对混合仿真平台的架构搭建提出了若干要求。文献[7]综述了智能电网中通信仿真技术与联合仿真平台的研究进展,着重分析了联合仿真平台中物理侧与信息侧的时间同步问题。文献[8]阐述了将实时硬件集成至能源信息物理系统仿真中的具体要求,认为能源CPS实时联合仿真框架必须满足外部组件的可扩展性并建议具备统一的硬件接口标准。文献[9]综述了智能电网技术中使用实时仿真和硬件在环技术的先进实验测试方法。
较早开展的非实时联合仿真的实现难度相对较小,文献[10-12]借助特定的数据转换模块联立Matlab与OPNET,以步进交替式仿真的时间同步机制实现了电力CPS联合仿真;该类平台可满足基础的信息物理耦合需求,但是非实时的仿真架构限制了运算性能与仿真精度,无法准确模拟系统中的信息物理耦合特性。进一步地,为实现联合仿真的实时性,文献[13-14]以RT-LAB和OPNET为核心组件,配合相应的数据接口构建了电力CPS实时仿真平台,可实现电力系统功率特性与通信网络流量特性的实时联合仿真。文献[15]基于HLA/Agent开发了OPNET和PSCAD/EMTDC的联合同步仿真平台,采用基于仿真步长的时间同步策略,同时适配IEC 61850标准与HLA规范。但部分文献将信息侧仿真环境的全部数据包整合后经由单一通信链路传输至物理侧仿真环境,无法反映网络中各条通信链路之间的流量特性[13-14]。另外,电力CPS仿真平台的安全防御研究尚处于初步探索阶段[16-18]。文献[16-17]在OPNET中配置了分布式拒绝服务攻击场景以模拟其对电力系统造成的影响,另外以修改双网卡计算机的互联网协议(Internet protocol,IP)信息的方式接入原有通信链路,实现了等效的中间人攻击。文献[18]在原有实时联合仿真平台的通信链路中增设了LABVIEW中间人攻击平台,依靠伪装IP信息实现了对特定数据包的侦听和篡改。但是以上方法均通过等效处理手段将攻击过程简化,未能结合网络安全技术进行实操验证,无法准确反映实际运行场景中的恶意攻击过程。
综上所述,现阶段的电力CPS联合仿真平台已基本实现了物理侧电力系统与信息侧通信网络的实时联合仿真,但其中各部分的仿真技术水平参差不齐:物理侧的电力系统功率特性仿真技术最为成熟,以RT-LAB为代表的实时仿真工具已基本满足现阶段的各类仿真场景;信息侧的通信网络流量特性仿真技术有待进一步发展,以OPNET为代表的实时仿真工具可满足简单的仿真场景需求,但存在硬件终端数量受限和通信拓扑过度简化等短板;网络安全领域的渗透测试与攻防技术仅处于起步阶段,鲜有研究关注具体的攻击实现手段,大多以等效或简化措施代替实际操作。
本文为解决电力信息物理系统的实时仿真问题,同时改进传统方案中不支持多端通信及渗透测试等缺陷,提出了基于多组件并行架构的电力CPS实时联合仿真平台架构及其测试算例:首先借鉴主流技术方案,选择RT-LAB与OPNET分别作为物理侧与信息侧的实时仿真环境;其次设计嵌入式控制组件,构建物理侧电力硬件在环实时仿真和信息侧通信系统在环实时仿真,在保证联合仿真实时性的同时提升通信网络的模型复杂度,为复杂的通信场景仿真提供多端通信的解决方案;再次设计渗透测试组件,借助网络安全技术实现基本的渗透测试功能;最后,基于多组件并行架构对应的多种实时仿真模式,设计了涵盖多种仿真场景的测试算例以验证平台的各项功能。
1 平台总体架构
本文提出的电力CPS实时联合仿真平台架构如图1所示。其中,嵌入式控制组件作为平台架构的主组件,是联合仿真的计算核心与数据枢纽;主组件连接了3个相互独立的从组件,依次为电力系统实时仿真组件、通信网络实时仿真组件和渗透测试组件;主组件与3个从组件并行运行,分别实现不同的实时仿真模式。

图1 仿真平台总体架构Fig. 1 The overall architecture of the simulation platform
首先,嵌入式控制组件提供了信息空间与物理空间的耦合接口,是本平台的核心主组件和主要技术难点。现有研究中描述信息流与能量流之间耦合关系的建模理论尚未成熟,如步进式交替仿真[10-11]、统一交互接口[13]等方法均未能兼顾仿真实时性与模型复杂度。选用嵌入式控制器件作为耦合接口的优点有:(1)在控制物理侧电能特性的同时参与信息侧的网络通信,以成熟的实物器件代替烦琐的理论建模,可提升平台应用的普适性;(2)保证了通信终端的实际数量和通信网络的模型复杂度,可提升复杂通信网络的仿真性能;(3)控制器在环实时仿真对控制算法具有更高的性能要求,可提升仿真结果的可信度。考虑到性能需求和通信功能,选用DSP芯片TMS320 F28377 D 和通信 芯片 W5300 的主控组合,将其集成在单块PCB电路板以实现模块化设计,与适配OPAL-RT的信号调理板构成嵌入式控制组件。
其次,通信网络实时仿真组件和电力系统实时仿真组件分别提供信息空间和物理空间的仿真环境,借助成熟的数值仿真软件模拟信息侧的流量特性与物理侧的能量潮流。在充分调研各类仿真软件的基础上,参考主流方案[6-8],选用OPNET软件包和OPAL-RT仿真套件分别作为通信网络实时仿真组件和电力系统实时仿真组件的数值仿真环境。其中,OPNET软件包允许在仿真设备中接入其他硬件实物进行系统在环实时仿真(system in the loop, SITL),OPAL-RT 仿真套件具备模拟信号与数字信号的输入输出(I/O)模块可实现控制器硬件在环仿真(controller hardware in the loop,HIL),上述2种功能分别提供了其对应从组件与主组件的联合仿真接口。
最后,渗透测试组件为网络安全技术在电力CPS中的实际应用提供了硬件支撑,是本平台相较于其他方案所独有的特色功能。现有的同类方案[13-14]大多采取等效的构造手段,对系统的原生通信网络或者交互数据进行预先改动,忽略了攻击细节且缺乏实际可行性。为确保网络恶意攻击的高还原性和高可行性,在调研主流渗透测试方案的基础上,选择Kali Linux和树莓派4 B单板机电脑分别作为渗透测试操作系统与物理主机。该组件经由以太网接入电力CPS的通信网络,通过运行脚本程序开展信息搜集、网络嗅探、ARP欺骗等渗透测试。
综上所述,本平台由1个主组件(嵌入式控制组件)和3个从组件(电力系统实时仿真组件、通信网络实时仿真组件和渗透测试组件)构成,各个从组件根据具体的仿真任务需求:既可以单独与主组件联立,分别构成电力硬件在环实时仿真、通信系统在环实时仿真和安防实验实时仿真,侧重电力CPS中的电力能量潮流、网络流量特性或安全防御性能仿真;也可与其他从组件共同联立主组件,构成实时联合仿真,兼顾电力CPS中物理侧与信息侧的耦合机制与交互特性。
2 组件运行机理
2.1 嵌入式控制组件
嵌入式控制组件用于联立其他从组件,实现电力CPS中节点设备的电气状态控制与通信数据交互,由若干块模块化的嵌入式控制板组成,每块控制板上集成了TMS320 F28377 D芯片、W5300芯片及其硬件电路,且各块控制板与电力系统中的节点设备一一对应,其硬件布局与软件功能如图2所示。

图2 嵌入式控制组件的硬件布局与软件功能Fig. 2 Hardware layout and software functions of embedded control components
本组件作为仿真平台中的核心主组件,具体功能包括:DSP片上双模式ADC配合信号调理板,将OPAL-RT仿真机输出的电气参量模拟信号转换为DSP中浮点变量,完成电气运行状态的量测采样;DSP双核CPU及片上CLA协同实现资源调控与控制运算,其中CPU负责主程序框架的任务协调、中断控制和外设调用,CLA负责并行执行主要的浮点计算和外设读写任务,协同实现电力节点设备的单体控制算法与通信模式配置;DSP片上ePWM模块配合信号调理板,将实时运算结果转换为相应的PWM脉冲控制信号,在进行电平转换与信号驱动后输入至OPAL-RT仿真机,实现电力节点设备中功率开关管的实时开断控制;W5300芯片在DSP中驱动程序的控制下,配置本地节点的IP信息与通信模式,并按预设的通信拓扑关系开启对应的TCP socket,实现本地节点与其他节点之间的网络数据通信。
2.2 电力系统实时仿真组件
电力系统实时仿真组件用于电力系统功率特性的实时仿真,包括RT-LAB上位机和OPALRT仿真机,其组成架构与运行机制如图3所示。

图3 电力系统实时仿真组件的组成架构与运行机制Fig. 3 Composition architecture and operation mechanism of real-time simulation components for power system
本组件作为电力硬件在环实时仿真的关键从组件,基本运行流程为:RT-LAB上位机中电力CPS物理模型经过分割和编译后,装载至OPALRT仿真机进行电力系统实时仿真,输出电气节点状态量测的模拟信号至嵌入式控制组件,并接收来自嵌入式控制组件的数字控制信号用于控制电气节点的运行特性,实现电力CPS中物理侧的在线参数调试与实时闭环控制。
2.3 通信网络实时仿真组件
通信网络实时仿真组件用于通信网络流量特性的实时仿真,包括OPNET仿真机,其组成架构及连接方式如图4所示。
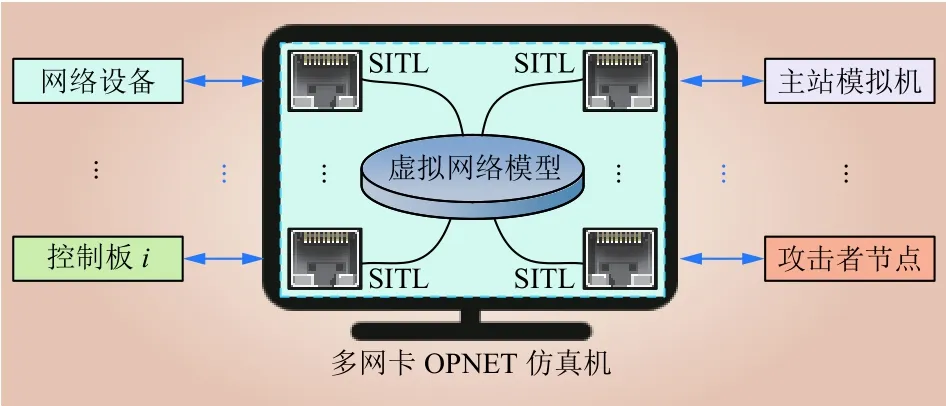
图4 通信网络实时仿真组件的组成架构及连接方式Fig. 4 Composition architecture and connection of realtime simulation components for communication network
本组件作为通信系统在环实时仿真的关键从组件,基本运行流程为:当前时刻外部通信终端的真实数据包经由OPNET仿真机中的以太网接口转发至对应的SITL模块,根据伯克利包过滤规则(Berkeley packet filter,BPF)完成过滤并转换为虚拟数据包;虚拟数据包参与以通信链路、交换机、路由器、服务器等网络节点模型构建的虚拟通信网络,按离散事件驱动的仿真机制执行预设的流量业务,仿真得到下一时刻应当发送至外部终端的虚拟数据包;待发送的虚拟数据包通过SITL模块完成过滤并转换为真实数据包,再经由以太网接口发送至对应的外部通信终端;至此完成单个离散时间区间内的虚拟通信网络仿真,同时得到了该时间区间内虚拟通信节点的流量特性与统计数据。
2.4 渗透测试组件
渗透测试组件用于电力CPS安全防御性能的测试验证,包括操作系统和执行设备,其组成架构与渗透功能如图5所示。

图5 渗透测试组件的组成架构与渗透功能Fig. 5 Composition architecture and penetration function of penetration testing components
本组件作为安防实验实时仿真的关键从组件,具体功能为:针对其他组件采用的Modbus TCP通信协议,Kali Linux攻击节点可基于其机制漏洞展开侦听、欺骗、截获、篡改和转发等渗透操作,以降低系统的网络通信性能或损害节点内的数据信息,完成窃取系统配置信息、篡改主站控制指令和伪造虚假运行状态等操作,实现拒绝服务攻击(denial of service, DoS)、中间人攻击(man-in-the-middle, MITM)和虚假数据注入攻击(false data injection, FDI)等恶意攻击。
本组件通过以太网接入包含嵌入式控制组件与通信网络实时仿真组件等设备的局域网,对网络中的TCP/IP端口开展嗅探扫描;在DoS攻击时,本组件基于扫描结果侦听特定的传输控制协议(transmission control protocol,TCP)连接,根据侦听信息构造虚假RST数据包以提前终止其通信过程;在MITM和FDI攻击时,本组件发送高频的地址解析协议(address resolution protocol,ARP)响应包以欺骗靶机,与之建立相应的TCP连接后即可进行数据包的截获、篡改及转发等操作。
3 算例仿真验证
3.1 基础算例
为验证本文所述电力CPS实时联合仿真平台的各项性能,以直流微电网CPS仿真研究为例,搭建其仿真模型如图6所示,设计了涵盖系统故障与恶意攻击等多种仿真场景的测试算例。

图6 直流微电网CPS仿真模型Fig. 6 Simulation models for DC micro-grid CPS
其中,物理侧电力系统为直流微电网,4个节点经DC/DC变流器接入母线,各节点的控制策略由对应的嵌入式控制器实现,相关参数见表1。

表1 电力系统参数Table 1 Power system parameters
信息侧通信网络包含路由器、交换机和SITL等模块,结合嵌入式控制组件实现跨网段的单向链式数据通信结构,即来自上一节点的通信数据包将转发至下一节点。主站模拟机、节点1和2、节点3和4分别从属于3个不同的网段,以上设备均需要经由交换机接入路由器以实现跨网段通信,相关参数如表2所示。

表2 通信网络参数Table 2 Communication network parameters
本算例的仿真进程如下:主站以100 ms的通信周期定时发送控制指令至节点1对应的嵌入式控制单元,实现目标节点输出功率的实时调控;节点1在接收指令后存储其中的功率参考值,将其应用至功率控制算法并封装为新的控制指令发送至下一节点;其余节点的处理进程与节点1类似,以期完成主站对所有节点输出功率的统一调控。
3.1.1 仿真性能论证
结合所给算例参数和多组件并行架构,对本平台的各方面仿真性能进行简要讨论。
(1)在仿真时间机制方面,不同于文献[19-22]的实时性讨论,本平台中物理侧与信息侧的仿真环境互为并行进程,因此其仿真实时性可进行独立分析。在本算例中,物理侧OPAL-RT仿真机的仿真步长设定值为20 μs,而DSP芯片的控制周期设定值为200 μs,二者间的数量关系符合控制器硬件在环仿真的常规要求,能够保证对物理空间的精准模拟与实时控制;信息侧OPNET软件中测得数据包传输延时最大值为7.53 ms,而系统内通信终端的通信周期设定值为100.00 ms,可保证系统在环仿真的实时运行与数据包的各向交互;渗透测试组件中Kali Linux节点执行攻击脚本的单次耗时最大值为64.00 ms,小于通信周期设定值,即攻击节点能够在相邻两次通信间隔内完成对目标数据包的截取、篡改及转发操作。
(2)在仿真场景覆盖方面,本平台相较于同类方案更适用于复杂通信网络仿真,可提供更为精细的通信链路流量特性数据,同时渗透测试组件为实施DoS、MITM、FDI等攻击提供了实操手段,可实现信息侧常规故障及恶意攻击场景;而物理侧OPAL-RT套件可配置实现设备动作、拓扑变化、负荷切换等常见工况;将二者细化、组合和协同即可覆盖电力CPS中主要运行场景的实时联合仿真。
(3)在平台可扩展性方面,凭借多组件并行架构的灵活组排方式,各个组件在保持基本架构不变的基础上可进行独立升级或扩展,从而以较小的维护成本实现平台的性能提升与组件的高复用性,便于在未来应用新型的仿真软件或硬件终端。
3.1.2 正常运行工况
考虑正常工况对应的仿真场景:主站模拟机定时发送的输出功率参考标幺值在13 s时由0.4改为0.5,因此节点1~4的输出功率将依次产生相应的跃升波形,同时各节点间的通信速率将基本保持不变。
图7a)为信息侧各节点通信速率波形。在仿真开始后,各节点对应的SITL模块与外部网络(即嵌入式控制组件中对应的控制板)之间的收发速率基本保持不变;节点2和节点3因为同时涉及控制指令的接收与发送,其收发速率约为节点1或节点4的2倍。图7b)为物理侧各节点输出功率波形。约13 s时主站下发的控制指令发生变化,单向通信链路决定了各个节点接收控制指令的先后顺序,因此各节点的输出功率也呈现依次跃升的波形。

图7 正常工况下仿真结果Fig. 7 Simulation results under normal working conditions
3.1.3 通信故障工况
考虑通信网络中发生设备故障的仿真场景:在正常工况仿真场景的基础上,设定OPNET仿真网络中节点4对应的SITL模块在10 s时进入故障状态,相当于节点4从通信网络中切除,因此在13 s时更新的控制指令将无法下发至节点4。
图8a)为信息侧各节点通信速率波形。在仿真的前10 s内,各节点对应的SITL模块与外部网络之间的收发速率波形与正常工况基本一致,10 s后由于节点4对应的SITL模块故障,其收发速率全部骤降为0;同时由于节点3和节点4之间的TCP连接断开,节点3的下发指令无法发送并获得回应,导致其收发速率减半;其余节点的收发速率基本保持不变。图8b)为物理侧各节点输出功率波形。约13 s时主站下发的控制指令发生变化,节点1~3的输出功率呈现依次跃升的波形;但节点4因通信故障无法接收新的控制指令,其输出功率保持不变。

图8 通信故障工况下仿真结果Fig. 8 Simulation results under failure conditions
3.1.4 DoS 攻击工况
考虑攻击者节点发起拒绝服务攻击的仿真场景:在正常工况仿真场景的基础上,攻击者节点在 10 s时对节点 1与节点2之间的Modbus TCP通信连接发起DoS攻击,相当于切断节点1与节点2之间的通信链路,因此在13 s时更新的控制指令将无法下发至节点2及其他节点。
图9a)为信息侧各节点通信速率波形:在仿真的前10 s内,各节点对应的SITL模块与外部网络之间的收发速率波形与正常工况基本一致,10 s后由于攻击者节点发起了针对Modbus TCP连接的RST-DoS攻击,其基本原理是伪装成TCP客户端向TCP服务器发送虚假RST数据包以终止连接,节点1的发送速率和节点2的接收速率激增;其余节点的收发速率基本保持不变。图9b)为物理侧各节点输出功率波形。约13 s时主站下发的控制指令发生变化,节点1可接收新指令并采取控制动作使输出功率跃升;但其余节点由于DoS攻击无法接收新的控制指令,其输出功率的稳态值保持不变。

图9 DoS攻击工况下仿真结果Fig. 9 Simulation results under DoS attack conditions
3.1.5 MITM 攻击 (FDI攻击)工况
考虑攻击者节点发起中间人攻击和虚假数据注入攻击的仿真场景:在正常工况仿真场景的基础上,攻击者节点在仿真开始时对节点3与节点4之间的Modbus TCP通信连接发起MITM攻击,将节点3下发至节点4的控制指令按特定规则进行篡改(具体规则为当数据包中输出功率参考标幺值>0.45时,为其增加0.1(p.u.)的偏置量,此步骤即实现了FDI攻击),相当于更改了主站对节点4的控制目标,因此在13 s时更新的控制指令将无法在节点4实现原有的预期控制目标。
图1 a)为信息侧各节点通信速率波形。在仿真开始时,攻击者节点发起了针对IP协议的ARP欺骗,其基本原理是以虚假的ARP回应包欺骗靶机实现数据包的截获、篡改及转发,因此各节点对应的SITL模块与外部网络之间的收发速率波形与正常工况无明显区别。图10 b)为物理侧各节点输出功率波形。约13 s时主站下发的控制指令发生变化,节点1~3的输出功率呈现依次跃升的波形;但节点4因MITM攻击和FDI攻击接收到了篡改后的控制指令,其输出功率跃升后的稳态值并不是主站模拟机下发的0.5(p.u.),而是被攻击者篡改后的0.6(p.u.)。

图10 MITM攻击工况下仿真结果Fig. 10 Simulation results under MITM attack conditions
3.2 进阶算例
依托基础算例的仿真配置和实验结果,本平台参照文献[23-25]的电路拓扑和通信网络,复现了基于分布式协同控制的多代理直流微电网CPS。其中,系统仿真模型的主体结构参见图6;OPAL-RT仿真机的仿真步长及DSP芯片的控制周期与基础算例一致,故关于仿真性能的论证不再展开;其余参数配置详见文献[23],此处不再赘述。
3.2.1 仿真预设场景
首先,仿真开始后,嵌入式控制组件中运行常规的直流微电网下垂控制算法[24];在t=2 s时,控制算法切换为分布式协同控制算法[25];在t=6 s时,节点 1 的本地负载由 20 Ω 切换至 10 Ω;在t=10 s时,渗透测试组件对节点3传输至节点4的数据包进行MITM攻击,在其传输的电流值中注入了一个正弦叠加分量,即

在t=16 s时,渗透测试组件对节点1传输至节点2的数据包进行DoS攻击,切断该方向上的数据通信,直至仿真结束。
3.2.2 仿真结果分析
图11 a)为信息侧各节点通信速率波形。在仿真开始后,各节点对应的SITL模块与外部网络之间的收发速率基本保持不变;在t=2 s时和在t=6 s时,控制算法和节点负载的变换并不会引起通信速率变化;在t=10 s时,MITM攻击只会修改数据包中的数据段,并不明显影响通信速率,该结果与3.1.5节中基础算例的仿真结果一致;在t=16 s时,DoS攻击导致节点1和节点2的收发速率激增,另外由于OPNET处理瞬时激增数据需要一定的响应时间,导致节点1、2与节点3、4之间通信连接的收发速率也产生了一定波动,该结果与3.1.4节中基础算例的仿真结果一致。

图11 进阶算例仿真结果Fig. 11 Simulation results of advanced calculation example
由物理侧各节点输出功率波形图11 b)可知,在仿真开始后,各节点输出功率从初始状态向控制目标收敛,但传统的下垂控制算法存在一定的静态误差,由图11 b)可见并未实现预期的功率比例关系;在t=2 s时,切换后的分布式协同控制算法具有更好的控制效果,由图可见各节点在t=2 s时产生了相应的功率跃升,使得补偿后的输出功率满足1∶2∶2∶1的比例关系;在t=6 s时,节点1的负载变化导致各节点输出功率按原比例增加,新的稳态工作点仍满足既定的功率比例关系;在t=10 s时,MITM攻击注入的正弦叠加分量导致各节点输出功率产生了相应的周期性波动分量,其中节点4作为首个被攻击的节点,其功率波动最为严重;在t=16 s时,DoS攻击导致节点2中协同控制算法的部分输入变量无法更新,引发节点2乃至其余节点的算法崩溃,进而导致系统控制失效,各节点的输出功率失稳(图11中最终稳态值0和300 W分别对应于输出功率模拟信号的幅值下限和上限)。
3.3 平台性能分析
(1)为验证平台中各组件功能的有效性,在测试算例中面向不同的侧重点,仿真了多种运行场景,其中:基础算例侧重典型工况切换的运行结果,对比突出特定事件动作或单一参数变化造成的结果差异;进阶算例侧重本平台针对复杂仿真对象的可用性和适配性,给出复合事件叠加和多个参数变化时的系统响应。基于上述算例的仿真配置及相关结论,能够说明各组件功能的有效性,同时可以指导本平台应用于其他电力CPS的联合实时仿真。
(2)为验证联合仿真的准确性,基于进阶算例在MATLAB/Simulink中搭建了等效模型,其中:物理侧与电力系统实时仿真组件配置一致;控制器与嵌入式控制组件配置一致;信息侧在信息通路中加入零阶保持器模块和其他数据操作模块,以分别模拟通信网络实时仿真组件中的通信时延和渗透测试组件的恶意攻击。图12为物理侧各节点的输出功率波形,忽略图11中模拟信号量测误差的影响,可以认为二者波形基本一致。因此,在计及信息侧通信时延及等效恶意攻击的情况下,Simulink的物理侧仿真结果及精度与联合仿真基本一致,验证了联合仿真的准确性。

图12 Matlab/Simulink仿真结果Fig. 12 Simulation results of Matlab/Simulink
4 结语
本文搭建了基于多组件并行架构的电力CPS实时联合仿真平台,实现了电力硬件在环实时仿真、通信系统在环实时仿真、安防实验实时仿真及实时联合仿真,可基本覆盖电力CPS中主要运行场景的实时联合仿真;相较于现有方案具备多端通信及渗透测试的功能,提升了对复杂通信网络及安全渗透测试的仿真能力;设计了涵盖多种仿真场景的测试算例,实验结果验证了平台中各组件功能的有效性与联合仿真的准确性。
为进一步提高本平台仿真性能,可以考虑更换脚本语言或优化程序架构,针对其他网络通信协议和信息安全漏洞实现更多的渗透功能与更高的执行效率,以丰富安防实验实时仿真的测试场景。
