基于声发射信号EMD-WPD特征融合的航天器在轨泄漏辨识方法
2022-02-28梁真馨丁红兵芮小博
綦 磊, 梁真馨, 丁红兵, 郑 悦, 芮小博, 张 宇
(1.北京卫星环境工程研究所, 北京 100094;2.天津大学 精密测试技术及仪器国家重点实验室, 天津 300072;3.天津大学 电气自动化与信息工程学院, 天津 300072)
随着航天技术发展和人类航天活动日益频繁,航天器扮演着越来越重要的角色,其运行状态直接维系着航天任务的成败。长期运行在复杂空间环境中的航天器,将受到振动、高低温交变、空间碎片、太阳辐射及宇宙射线的作用,舱体可能产生松动变形、表面氧化、腐蚀、损伤穿孔等进而引发气体泄漏事故[1],若不及时发现将酿成惨重后果。因此,航天器在轨泄漏的快速、准确辨识是航天系统安全运行的重要保障技术。
传统泄漏检测手段包括声发射法、红外热成像法、真空氦质谱吸枪法,其中声发射检测技术是一种原理简单、稳定、高灵敏的动态无损检测技术[2],以泄漏引起的结构高频应力波为检测目标,已经广泛应用于泄漏识别领域。2017年,Yu等[3]通过声发射技术结合支持向量机(support vector machine, SVM)算法检测并识别了室内气体管道的微小泄漏;2018年Li等[4]基于声发射技术成功检测了水管道泄漏信号,从中提取泄漏特征参数并利用人工神经网络实现了泄漏识别;2020年,Diao等[5]提出一种改进的变分模式分解(variational mode decomposition, VMD)方法并应用于水管道泄漏辨识,进一步提高泄漏辨识准确度。上述文献虽然在泄漏检测领域取得一定成果,但航天器泄漏具有气体从大气向真空流动的特点,气体分子间碰撞减少,泄漏产生的声发射信号较常规泄漏更加微弱,泄漏辨识难度增大。
现阶段已有研究学者针对航天器在轨泄漏展开研究。2006年,Holland等[6]研究了航天器在轨泄漏声发射信号特征,并提出了一种基于阵列信号处理的泄漏定位方法;2014年,李唯丹等[7]利用空气耦合声发射传感器研究了真空泄漏产生的声波中心频率与声压衰减关系,但是由于空耦传感器频率感知范围有限,未得到通用性结论;2015年,綦磊等[8]综合考虑泄漏信号的时域和频域能量特征,利用参数特征分析法研究了不同孔径与声发射信号之间的关系,但能量特征在实际应用中受到信号传播距离、传感器耦合状态等因素的影响,其特征的不稳定性制约了泄漏辨识精确度的进一步提高。
综上,本文提出了一种基于声发射信号经验模态分解(empirical mode decomposition, EMD)和小波包分解(wavelet packet decomposition, WPD)并行特征融合的泄漏发生识别方法,该方法从分解的声发射信号中提取时域无量纲因子和频域特征参数进行泄漏分类模型训练,有效避免能量特征的误差和不稳定特性,进一步提高了辨识的识别精确度。
1 泄漏辨识算法
1.1 声发射信号分解
当航天器真空密封结构发生气体泄漏时,气体会在压力差的作用下穿过微小孔径并发生高流速的湍流射流[9]。本项目利用压电声发射传感器获取气体泄漏引起的结构弹性波,并进行分析处理以监测识别泄漏现象发生,流程如图1所示。
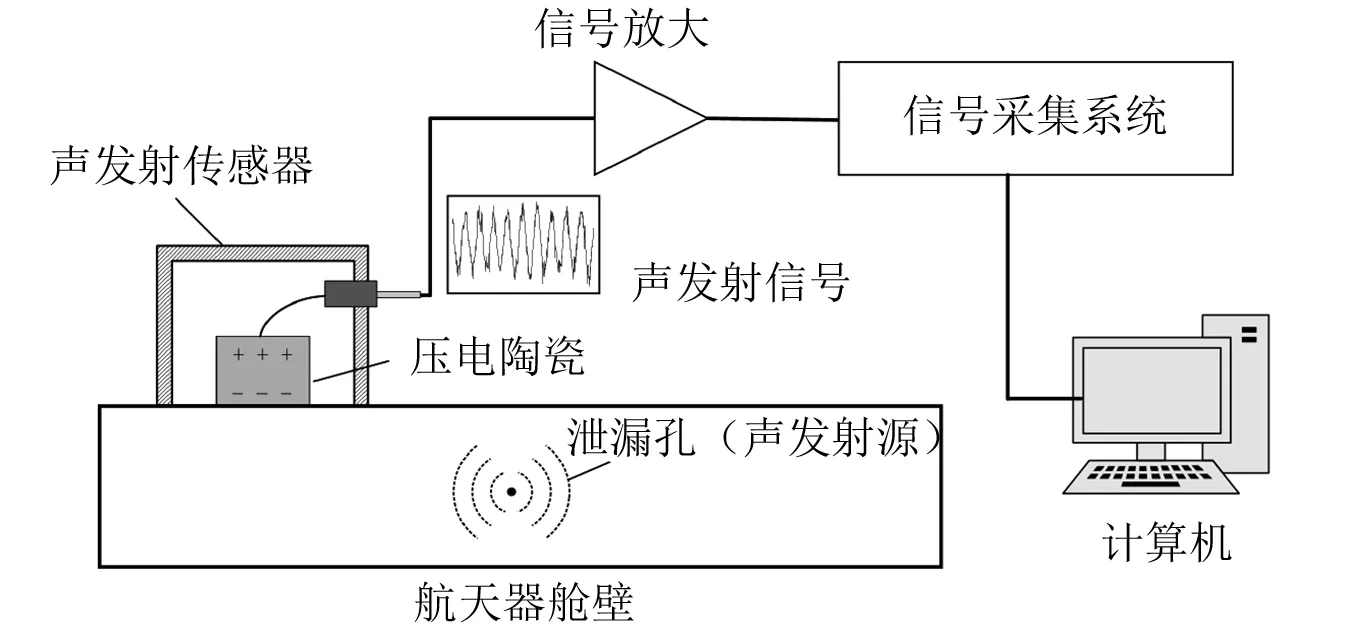
图1 航天器泄漏声发射检测示意图Fig.1 Schematic diagram of spacecraft leakage acoustic emission detection
本文提出的基于声发射信号EMD-WPD特征融合的气体泄漏识别方法流程,如图2所示,主要包括信号分解、特征提取、特征鉴别、模型分类等步骤。
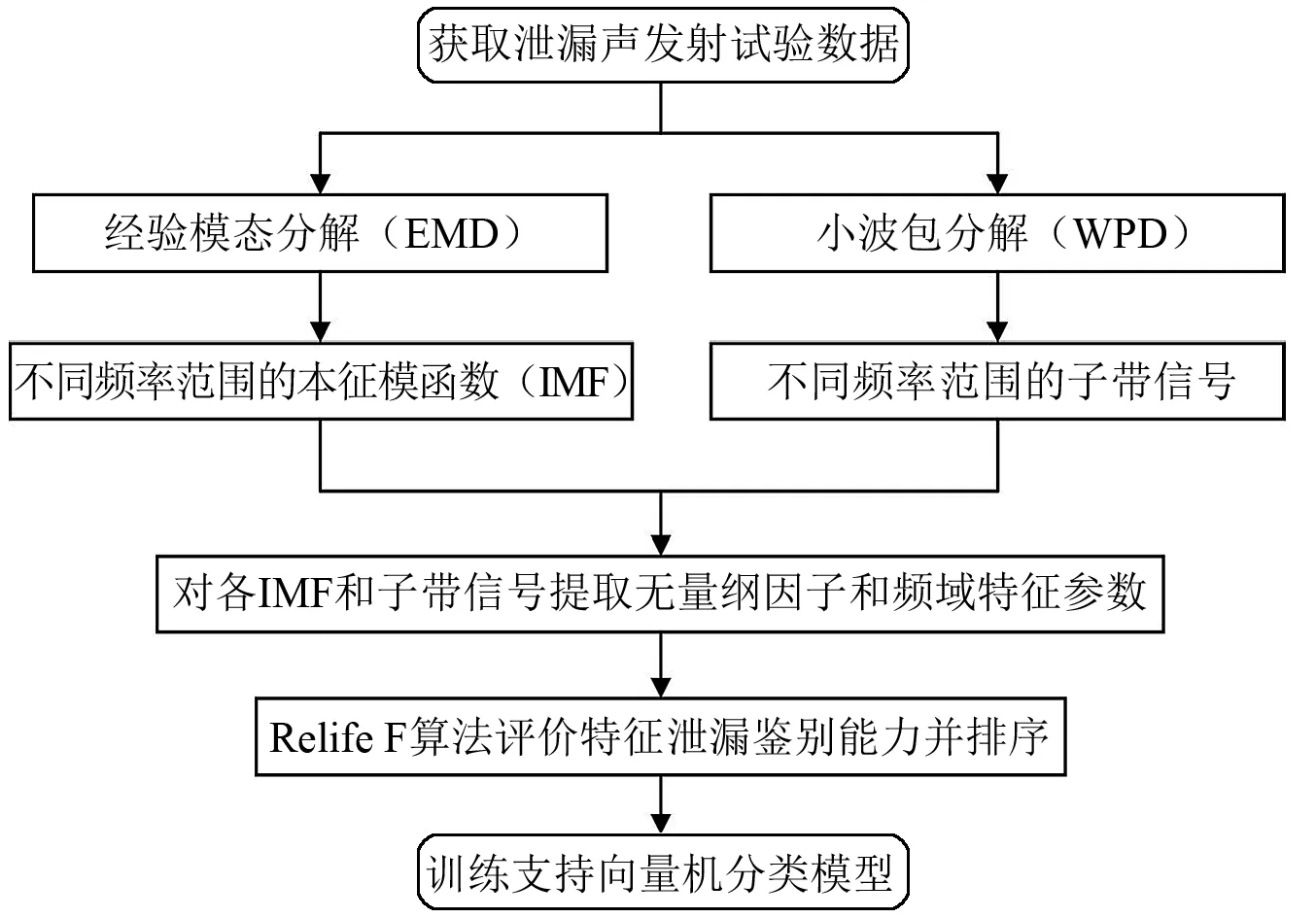
图2 泄漏识别方法流程图Fig.2 Flow diagram of leak identification method
首先,将声发射信号分别通过EMD和WPD分解成为不同频率范围内的子带信号。EMD基于局部尺度分离理论,无需预定基函数。因此,EMD可以将泄漏信号自适应地分解为一系列频率分量称为本征模函数(intrinsic mode function, IMF)。IMF是通过筛选原始数据而产生的,这是一个反复的过程[10]。泄漏信号经EMD可以分解为若干个IMF和一个残差函数之和
(1)
式中:x(t)为泄漏原始信号;imfi(t)为分解获得的第i个IMF;rn(t)为经分解得到n个IMF后的泄漏信号残余分量。IMF具有从高频到低频的多尺度特性,对分解得到的IMF进行适当筛选可以剔除高频干扰,保留泄漏信号的主要信息,不同的IMF包含泄漏信号不同频段的特征信息。
小波包分解是建立在小波分解基础之上的分解方式,可以对包含大量中、高频信息的信号进行更好的时域局部化分析[11]。设{hn}n∈Z是尺度函数φ(t)对应的低通系数滤波器,{gn}n∈Z是小波函数ψ(t)对应的高通系数滤波器,其中gn=(-1)nh1-n,并定义递推关系
(2)
当n=0时,w0(t)=φ(t),w1(t)=ψ(t),则函数集合{wn(t)}n∈Z为由w0(t)=φ(t)确定的小波包。不同的小波包基具有不同的泄漏信号时频局部化能力,因此在分小波包分解系数{uk}上定义代价函数M,泄漏信号若在小波包基B下的分解系数具有最小的代价函数值,则B为泄漏信号在代价函数M下的最佳基。通过选择小波函数ψ(t)并设定分解层数N,WPD将泄漏原始信号频段平均分为2N个子频段信号,选合适的子频段信号可以滤除噪声影响,保留主要频段信息。
1.2 特征提取
为避免能量特征的误差和不稳定特性,本文从无量纲因子和频率参数角度进行分析,提取了泄漏信号经频域分解后各子信号的时域峰度因子、偏度因子、波形因子,同时还提取了频域峰度因子、偏度因子、波形因子、峰值频率、频谱带宽、带宽质心频率共计9种特征参数。时域峰度因子(K)和偏度因子(S)的计算方法可参考文献[12-13]。波形因子的计算公式如式(3)和式(4)所示
F=xrms/xarv
(3)
Ff=yrms/yarv
(4)
式中:F为时域波形因子;Ff为频域波形因子;x为时域泄漏信号;y为泄漏信号快速傅里叶变换(fast Fourier transform,FFT)后的频域幅值序列;下标rms为信号有效值;下标arv为信号整流平均值。峰值频率fmax计算方法如式(5)所示
fmax=max(y)|f
(5)
式中:f为泄漏信号FFT变换后的频率序列;max()为信号最大值。频谱带宽fdB的计算方法如式(6)所示
fdB=0.3max(y)|fup-0.3max(y)|fdown
(6)
式中,Y|f为幅值为Y时的频率值。带宽质心频率fC计算方法如式(7)所示
(7)
1.3 特征评价与分类算法
在对所提取的泄漏特征进行分类模型训练之前,需要对泄漏特征进行评价和选择,以剔除不相关、没有差异刻画能力的特征,降低特征维度,减少训练时间。Relief F算法是一种原理简单,运行效率高的特征挑选算法,在泄漏特征集D中随机选择一个样本R,并从R同类的样本中寻找k个最近邻样本H,从R不同类的样本中寻找k个最近邻样本M,然后根据式(8)、式(9)更新每个泄漏特征的权重

(8)
(9)
式中:A为泄漏特征;m为随机选择次数;W为泄漏特征权重矩阵,初始值为0;diff(A,Ri,Rj)为样本Ri和样本Rj在泄漏特征A上的差。以上过程重复m次,最后得到泄漏特征的平均权重,权重越大表示该泄漏特征的区分能力越强。利用特征评价算法得到1.2节中9种泄漏特征参数的权重,选取权重较高的特征并剔除权值较低的特征,有助于降低特征维度,减少训练时间,提高泄漏辨识准确度。
确定输入特征后,利用SVM算法进行泄漏辨识[14]。其核心思想是求解的n维特征权重w和实数偏置b,得到以最大间隔把泄漏与不泄漏两类样本分开的最佳超平面wTx+b=0,x为泄漏特征向量。为避免异常数据影响,引入松弛因子ξi>0,i=1,2,…,N和惩罚系数C,SVM求解的最优化问题抽象为带不等式约束条件的极值问题,如式(10)所示
s.t.yi(w·xi+b)≥1-ξi,ξi≥0,i=1,2,…,N
(10)
当数据集并非线性可分时,则使用映射函数将数据映射至高维空间,转化为线性可分问题。SVM利用核函数方法避免求解过程中映射函数的复杂内积运算,径向基核函数(radial basis function,RBF)是SVM中较常用的核函数之一,如式(11)所示,其中σ为核参数。本文采用网格搜索方法确定SVM分类模型中惩罚系数C和核参数σ的最优值。
(11)
2 真空泄漏采集试验
2.1 真空泄漏信号采集平台
试验平台由真空泄漏试验台和声发射信号采集系统两部分组成,试验装置主要有真空泵、抽气管、缓冲罐、真空计、带孔金属板,声发射信号采集系统包含声发射传感器、前置信号放大器、信号采集仪和计算机,采集现场如图3所示。声发射传感器为Nano30谐振型传感器,频带范围为1 kHz~1 MHz,灵敏度大于-70 dB,信号采集仪为DS2-16A全信息信号分析仪,采样精度16位,采样频率3 000 kHz,前置放大器是增益为40 dB的直通滤波,信号触发阈值为25 dB。金属板上设计有直径为0.38 mm,0.50 mm,0.80 mm,1.00 mm 4种圆形通道型漏孔。传感器安装在板子中心位置(0,0)点,4个漏孔分别位于(20 cm,20 cm)、(20 cm,-20 cm)、(-20 cm,-20 cm)、(-20 cm,20 cm)处,如图4所示。传感器与各漏孔之间声波传播路径相同,避免其他因素对漏孔辨识的影响。真空泵运行时不断抽取缓冲罐内气体,稳定后金属板下侧形成准真空环境,通过真空表读取气压约为1 000 Pa,上侧为常压大气环境,气压为101 kPa。不移除漏孔上覆盖的聚酰亚胺胶带直接采集到的信号为无泄漏时的本底噪声,包含机械泵运转噪声和电噪声,该信号更接近航天器未发生泄漏时运转的真实情况,而移除聚酰亚胺胶带后,在压力差作用下空气从漏孔泄漏至缓冲罐,泄漏产生的声信号和本底噪声一同被耦合在金属板表面上的声发射传感器获取。试验依次采集4种泄漏孔发生稳定泄漏的信号及不发生泄漏的信号,每种条件重复试验40次,共计320组试验数据,信号采集仪采集时间设定0.1 s,仅保留每次试验的中间部分稳定信号约17 ms做后续处理。

图3 声发射泄漏检测试验系统Fig.3 Acoustic emission leak detection experiment system

图4 试验平台漏孔分布图Fig.4 Distribution map of the leakage platform
2.2 泄漏信号时-频域特征分析
以0.50 mm漏孔采集的信号为例,无泄漏与泄漏状态的信号时频域分别如图5(a)和图5(b)所示,泄漏与未泄漏信号的频率分布范围接近,很难通过简单频域特征加以区分。若不进行频域分解直接提取1.2节中的9种特征参数,结果见图5(c),泄漏与未泄漏信号的特征参数高度相似,仅偏度因子S和峰值频率fmax存在一定区分度。训练得到的SVM泄漏辨识模型准确度仅为79.2%,需要结合频域分解进一步提高辨识精度。
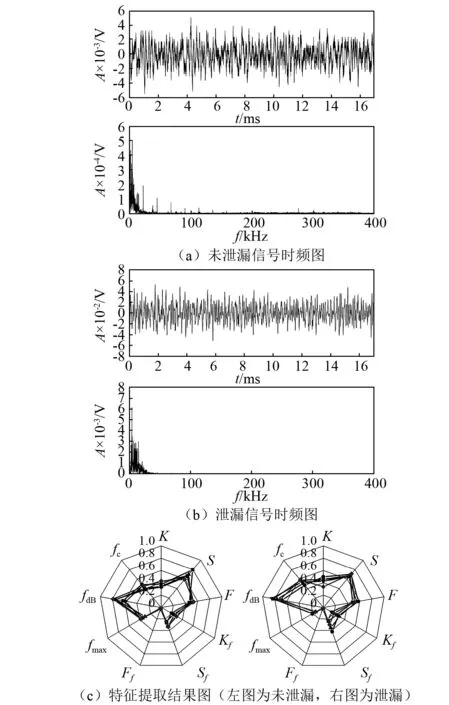
图5 0.5 mm漏孔信号特征提取Fig.5 Feature extraction of 0.5 mm leakage signal
3 泄漏辨识试验结果
3.1 泄漏信号EMD与WPD分解
将试验数据利用EMD分解为10个IMF和一个残差函数,计算各IMF与原始信号的互相关系数,结果如图6所示,可以发现IMF3、IMF4、IMF5、IMF6系数明显高于其他IMF,故选择上述4个IMF以排除其他无效模态和噪声的影响。
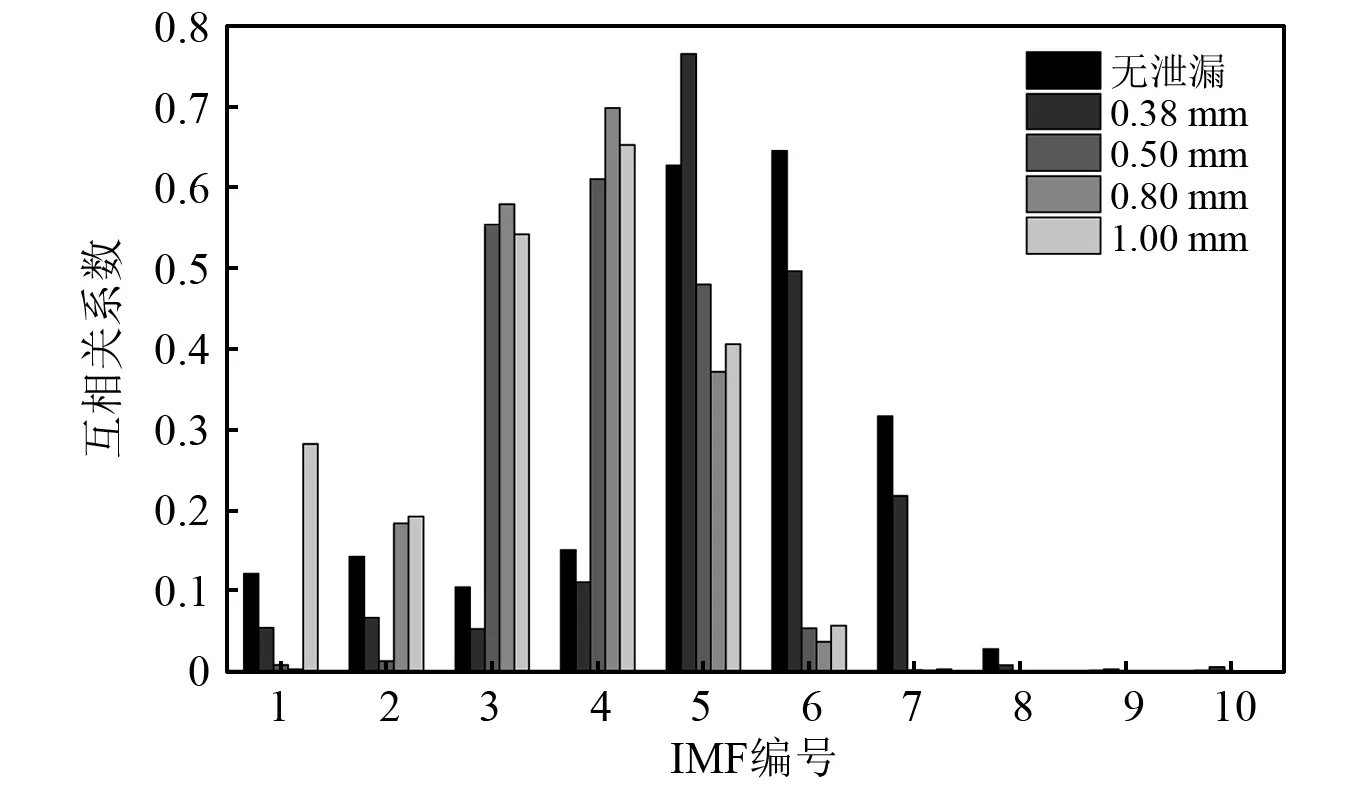
图6 IMF与原信号互相关系数Fig.6 Correlation between IMF and original signal
试验数据用WPD进行频域分解,选择dmey小波作为小波母函数,分解层数设定为8层,选择信息熵代价函数如式(12)所示
(12)
式中,uk为小波包分解系数序列。选择分解得到的前4个子频带信号从中提取特征参数分频段反映信号特点。
每组试验数据经过上述2种分解方式成为8个子带信号,以0.50 mm漏孔的实验数据为例,其EMD和WPD分解结果时域图如图7所示,频域图如图8所示,可以看出,经EMD或WPD分解后的子信号具有从高频到低频的多尺度特性,且每段子信号包含原始数据主要频带范围内的部分信息,频域分解有助于后续的多维度特征提取。
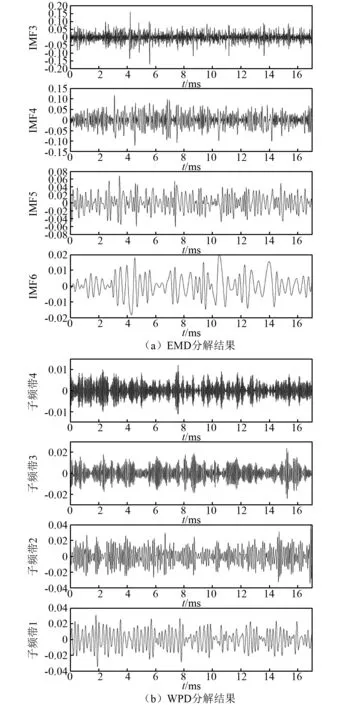
图7 0.50 mm漏孔泄漏信号的EMD与WPD分解结果时域图Fig.7 Time domain diagram of EMD and WPD decomposition results of 0.50 mm leakage signal
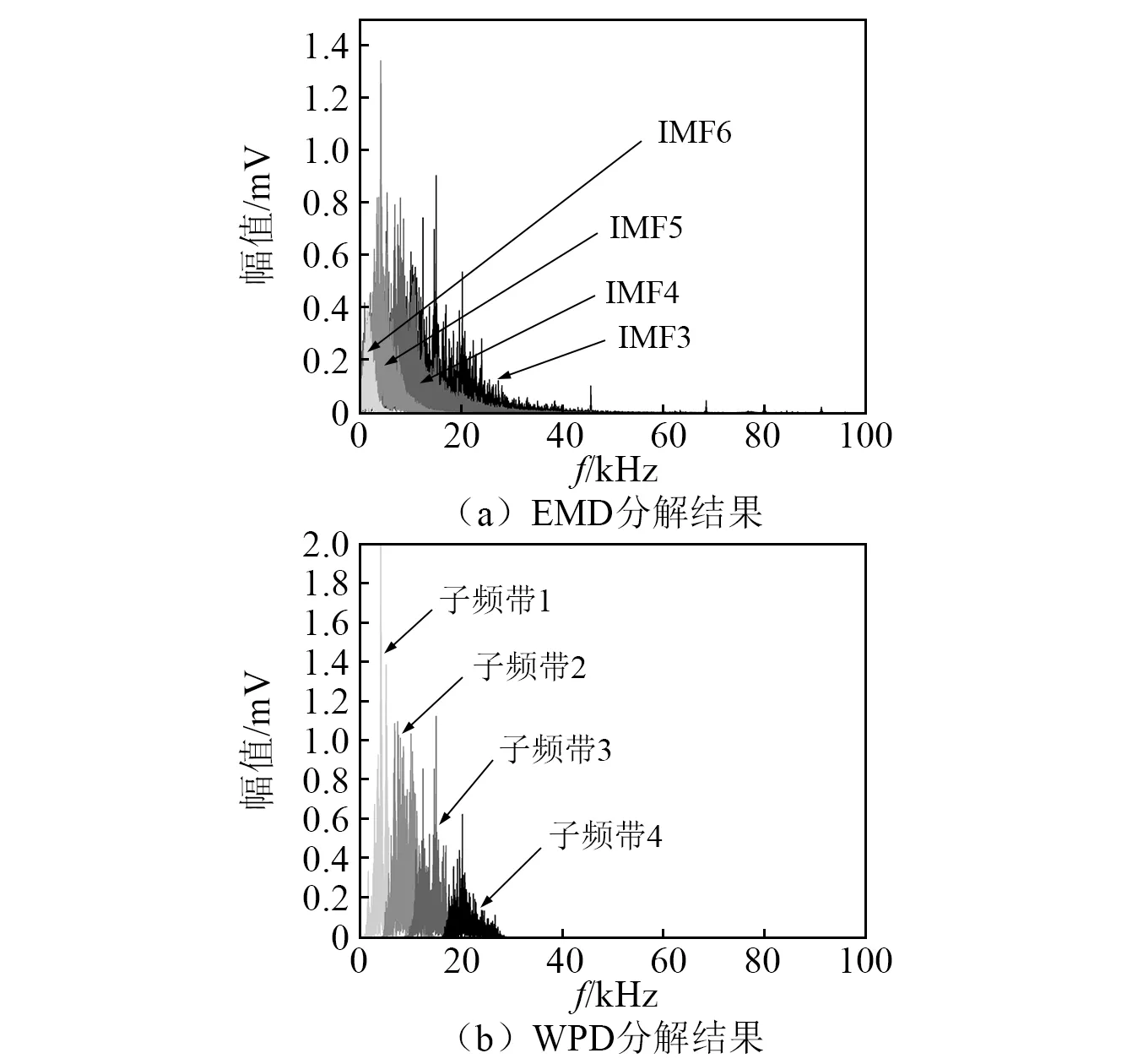
图8 0.50 mm漏孔泄漏信号EMD和WPD分解结果频域图Fig.8 Frequency domain diagram of the decomposition results of EMD and WPD of the leakage signal of the 0.50 mm
3.2 无量纲因子和频率特征提取及评级
分解得到的各IMF和子频带信号中提取1.2节所述9种特征参数,并对提取结果归一化处理,最终形成640×36的数据矩阵作为机器学习数据库。以0.50 mm试验数据的特征提取结果为例,如图9和图10所示,可以看出相同试验下的特征参数具有较好一致性和稳定性,不同子信号的特征之间则有一定区分度,利用特征选择和SVM分类算法可以进一步量化泄漏发生与不发生特征的差别,达到泄漏发生识别的目的。
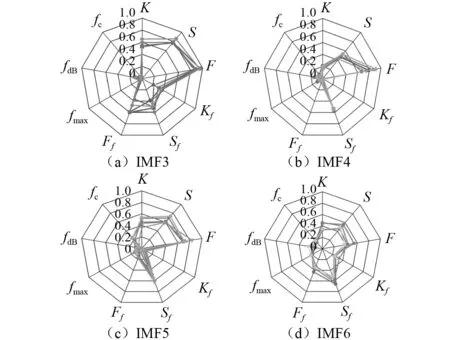
图9 0.50 mm漏孔泄漏信号特征提取结果Fig.9 0.50 mm leak leakage signal feature extraction results
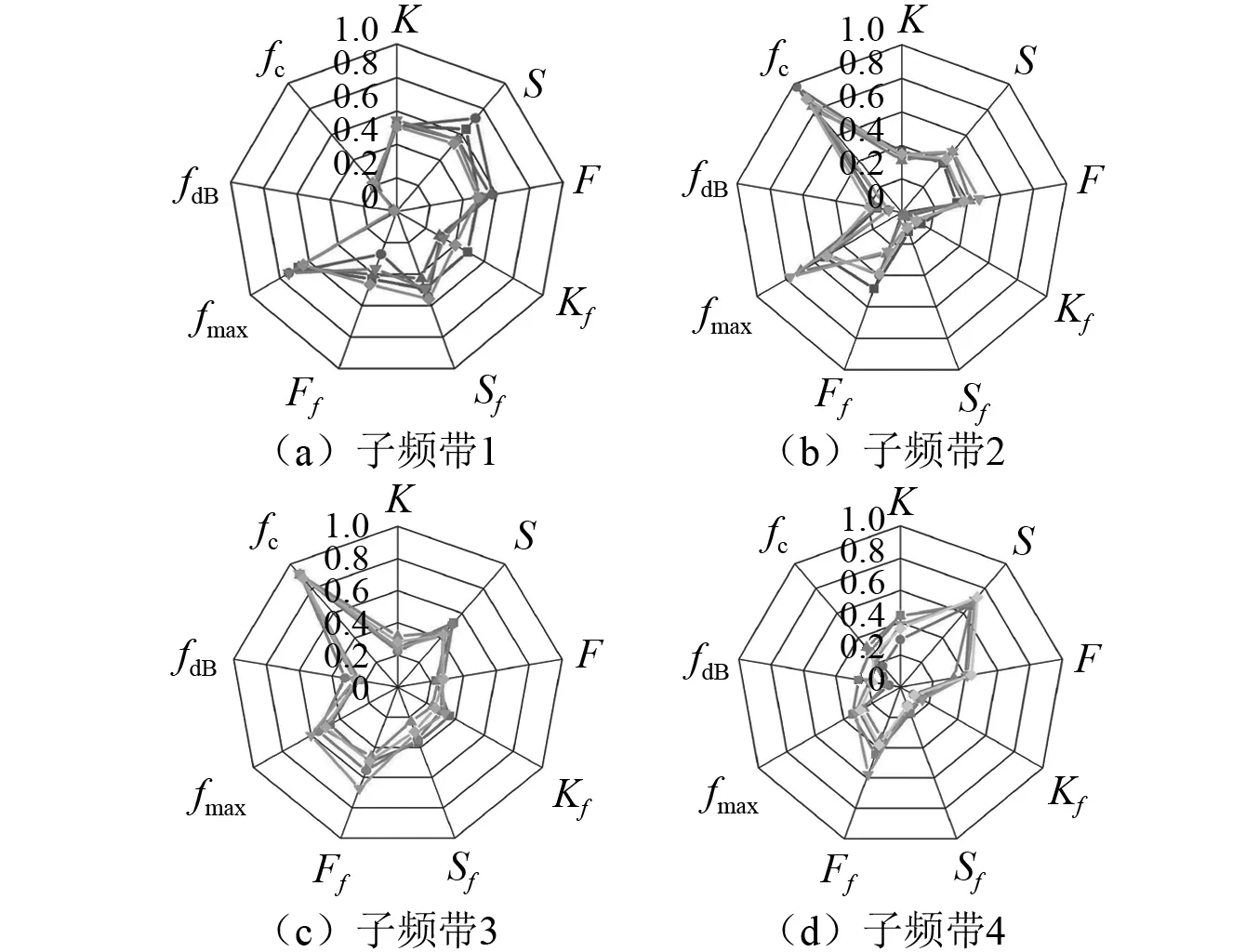
图10 0.50 mm漏孔泄漏信号特征提取结果Fig.10 0.50 mm leak leakage signal feature extraction results
按照Relief F算法原理对640×36数据矩阵中各特征泄漏区分能力进行量化评价并排序,部分计算结果如表1所示,表中IMF编号取值为3、4、5、6,子频带序号取值为1、2、3、4,符号含义详见论文1.2节,计算方式见式(3)~式(7)。表中可知特征IMF5的频谱带宽fdB和子频带4的频率峰值因子Kf权值最高,由Relief F算法原理可知上述2种特征的泄漏区别能力最高。
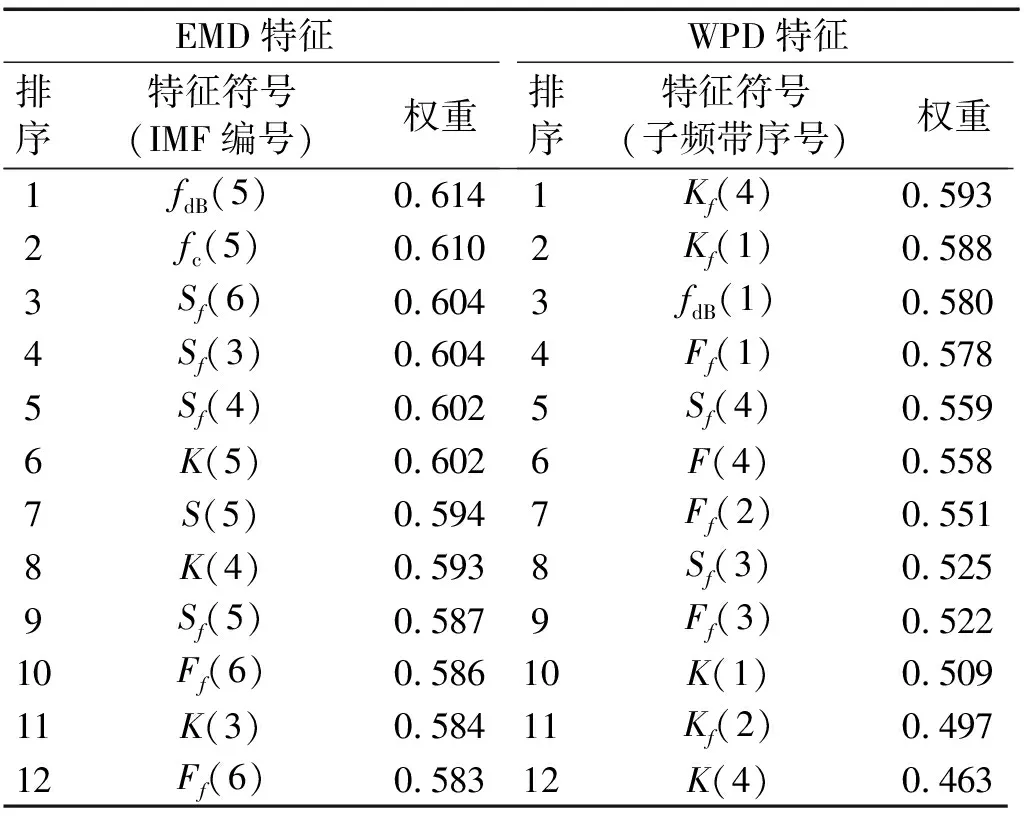
表1 基于Relief F算法的特征权重排序表
3.3 泄漏辨识结果
在640×36的机器学习数据库中,随机选定其中70%的数据作为训练数据集,其余30%作为测试数据集,径向基核函数RBF作为SVM泄漏分类模型的核函数,使用交叉验证方式来评估分类器性能。对于SVM分类模型的惩罚系数C和核参数σ,利用网格搜索方法确定其最优值,网格搜索范围设定为0.1~10.0,步长设定为0.1。基于Relief F算法对特征的评估结果,选择不同泄漏特征组建SVM训练集,验证不同特征对模型分类的影响。
当使用EMD分解方式提取得到的全部特征用于SVM分类训练时,泄漏分类模型精度为90.6%;而使用WPD分解方式提取得到的全部特征用于SVM分类训练时,泄漏分类模型精度为94.8%;若从原始数据中直接提取3.2节中的特征用于SVM分类训练,略过频域分解步骤,则分类模型精度为79.2%。可以发现经过EMD或WPD频域分解后的泄漏识别精度得到了提高,模型分类精度分别提高了11.4%和15.6%,表明通过频域分解以分频段多角度分析信号方法的有效性。
以Relief F算法对特征权值的排序为顺序,随着输入特征数量的增加,分类器泄漏识别精度曲线如图11所示,由图11可见在前3种特征中,2种特征组合方训练得到的分类器精度随特征数量递增,在前6种特征中,泄漏分类器精度均保持较高水平,表明Relief F算法有助于筛选区分能力好的特征并保持模型分类精度。但随着输入特征数量的继续增加,WPD分解方式训练的分类器精度下降且波动较大,对特征的选择较为敏感,表明从WPD分解中提取的特征存在噪声特征数据,导致模型计算误差增大分类精度波动。相比之下EMD分解方式训练的分类器精度缓慢上升,达到最高精度需要输入前18种特征,由于过多的特征数量会影响模型的泛化能力[15-16],需要结合2种分解方式所得特征,进一步提高分类器精度的同时减少输入特征数量。

图11 模型分类精度随特征数量变化曲线Fig.11 The curve of model classification accuracy with the number of features
采用EMD-WPD并行特征融合的方式组建训练集,分别选择EMD和WPD中Relief F评价结果权值较高的特征并行融合作为SVM输入训练集,模型分类准确度如图12所示。表2中对比了在不同输入特征数量下,3种训练特征集组建方式的模型泄漏识别准确度,可以看出在相同输入特征数量下,EMD-WPD并行特征融合训练得到的分类器精度均高于其他特征组合方式,并在输入特征数量为8时,即EMD和WPD分解所得特征权值排序中各前4种特征,分类器精度达到96.9%,是一种可行的航天器泄漏识别方法。
4 结 论
本文提出了一种基于声发射信号EMD-WPD并行特征融合的气体泄漏发生识别方法并开展了试验验证,得到如下结论:
(1)在分类模型相同的条件下,通过EMD或WPD频域分解提取特征的方法,比原始数据直接提取特征的分类精度分别提高了11.4%和15.6%,证明了通过分解方式以分频段多角度分析信号方法可以有效提高泄漏辨识准确度。
(2)Relief F算法有助于筛选区分能力好的特征,减少训练特征数量并提高模型分类精度。
(3)EMD-WPD特征并行融合方法训练分类器,分类器能够保持较高分类精度的同时输入特征数量进一步减少,最高辨识精度可达96.9%,是一种具有应用潜力的航天器泄漏辨识方法。
