协作机器人控制技术的研究
2022-02-26叶金培王宏宽江子杰
叶金培 王宏宽 江子杰
(中国电器科学研究院股份有限公司 广州 510300)
引言
目前国内用于工业生产的一般都是工业机器人,协作机器人在市场上的占比相对较小,而且协作机器人的应用主要都是单臂的协作机器人。现在国内做双臂协作机器人的公司也十分少,真正能够应该到生产的更少之又少,大多数都停留在研究阶段。现在国内企业关于协作机器人的研究都集中在单臂机器人上,双臂协作机器人的研究比较少。中国电器科学研究院有限公司业务领域的家电工厂目前自动化程度较低,还需要依靠大量的人工进行家电产品的装配调试,而且家电产品的装配也是比较复杂,这也成为家电生产线自动化率低的重要原因之一。所以,研究开发出一款灵活协调的协作机器人是十分有必要的。让自主开发的双臂协作机器人导入到我们的家电工厂,部分替代或者完全替代某些人工操作工位,节省人工成本,提高我们家电工厂的自动化率与科技感。
1 国内外现状
1.1 国外协作机器人发展概况
大数据热、云计算热等的崛起使人工智能开始成为工业的主要开发对象,同时,人工智能未来会推动工业机器人相关产业升级换代,人机协作与人机共融引领自动化发展的主流趋势。随着人工智能技术的不断进步,协作机器人成为整个自动化行业的风口。2016年开始,协作机器人在全球的销量开始呈现爆发式增长。同年,其的销售量已经突破了1万台,同比增长率超过90%。与此同时,协作机器人仍然在刚起步的发展阶段,很多厂商都在经历着产品开发、试错、优化,再设计,随着技术路线的不断变更,使得设计方案也在不断优化。在新产品、新模式快速更新换代的情况下,使整个协作机器人行业迅速进入优胜劣汰的阶段。2017~2019年,从全球协作机器人销量规模来看,这类产品市场销量增速明显放缓。截止至2019年,全球销量为3万台,同比增长36.4%。协作机器人的海外销售规模表明,全球2019年协作机器人的销售总额达到50亿元,同比增长31.6%[1]。
目前全球协作机器人品牌竞争激烈,目前,丹麦的Universal机器人公司是全球领先的协作机器人生产公司。根据Universal机器人公开的数据,目前全球Universal协作机器人销售总量累计已突破3.7万台,市场占有率居该领域的市场首位。不过,随着ABB、Kuka、FANUC、Yaskawa等传统工业机器人企业开始进行协作机器人的相关开发,此类市场的竞争变得越发的激烈。
1.2 国内协作机器人发展概况
由于中国老龄化问题的出现,适龄劳动人口的数量不断减少,使得人力方面的成本大幅度提升,国内劳动密集型的企业越来越倾向于选择机器人来替代重复的劳动力。智能协作机器人与工业机器人相比,其优势在于协作机器人具有使用成本低、整体重量轻、安全等级高等特点。对此,劳动力结构的加快调整会提高对协作机器人的相关市场需求。并且,随着我国产业结构转型,传统制造业与自动化控制、人工智能等新型技术相互结合,劳动密集型企业对智能制造、无人工厂、信息化等先进技术也表现出十分的渴求。目前根据协作机器人的影响力,机器人能够满足人机交互、柔性化生产以及智能制造的现代工业需求,并且拥有广阔的市场前景。仅仅2019年,我国协作机器人的市场规模已经达13亿元,相比同期增长42.9 %。在传统工业机器人市场不佳的情况下,协作机器人仍然保持增长态势。
近年来,我国的协作机器人,通过不断加强技术优化以及产品创新设计,一步步打破国外协作机器人的市场垄断,其中大族、达明、珞石、节卡、遨博、新松国产自主品牌,在协作机器人市场份额持续增长。
目前制约我国工业机器人产业发展的主要瓶颈是核心零部件缺失,为保障协作机器人的灵活性、安全性及生产柔性,目前大多数企业使用了如伺服电机、谐波减速机、安全控制器、扭矩传感器、安全控制器等众多传统工业机器人没有的零部件。我国在机器人行业上存在较大技术空白。如果在开发制作的过程中完全采用进口品牌的核心零部件,我国协作机器人的生产制造成本将会大幅提升,完全没有价格优势。
当前,协作机器人的设计需要根据实际应用场景,按照控制器预设的程序算法来实现规定动作,其精度的好坏与核心零部件加工制造精度有着巨大的关系。当生产切换场景时,需要人工重新设定原点,调试新的机械臂运动轨迹。由于AI技术的迅速进步,激光、视觉识别、深度学习将成为协作机器人的新中枢。这些先进技术使其可以进行自主判断、自主学习、自主感知、并进行分析从而进行决策以及人机交互的能力。引入智能算法技术,对机器人的行动误差进行相应的补偿,这样可以提高协作机器人的适用范围[1]。
2 研发内容
人机协作机器人不仅可以拥有人的特长,也可以拥有机器的特长。它不但可以不停地进行相同的物理性动作、逻辑推理和思维,而且可以在繁杂的环境下进行判断并下决策[2]。其协作性主要表现在信息交互,可以让人和机器进行物理接触,进行信号交换,亦可以通过HMI。人机协作机器人的基本操作主要有四点:第一、双臂需要灵活操作;第二、人可以直接对机器人进行操作;第三、人与设备的安全因素,因为是机器人与人类是在同一个环境下工作的;第四、直接接触。就是在机器人和工作场景之间、机器人的左右手臂,还有机器人和操作工人之间。其中,接触操作要比现在一般工业机器人的应用要复杂得多,所以我们应该全面重新设计系统的算法、程序,操作、硬件、控制和软件等。
双臂机器人最主要的组成部分是关节、控制部分、软件系统。一个先进的机器人关节应该部分包含力矩传感器,电机控制器,电机和减速机等基本组成部分。
具体研究内容如下:
1)双臂机器人关节的设计。关节示意图如图1所示。研究关节内部的电机、减速机、编码器、力矩传感器、电流传感器等的综合控制,使整个控制系统流畅和谐地运行。掌握各零件的安装方式,装配关系,安装连接的设计点,对于电控元器件,要了解其控制方式,输入输出口和各项参数等。通过半年时间的研究,协作机器人现在比较适合的是使用中空伺服电机配合谐波减速机进行控制。伺服电机能够摆正运行的精度,可控制关节准确旋转。采用谐波减速机可以增加机器人的负载。谐波减速机比传统的齿轮减速机具有更大负载,而且在正反转的误差更小,其结构也紧凑,最为适合用作协作机器人人的关节减速机。也是因为谐波减速机的回转误差小,所以在机器人零力拖拽功能的时候控制更加平稳和可靠。
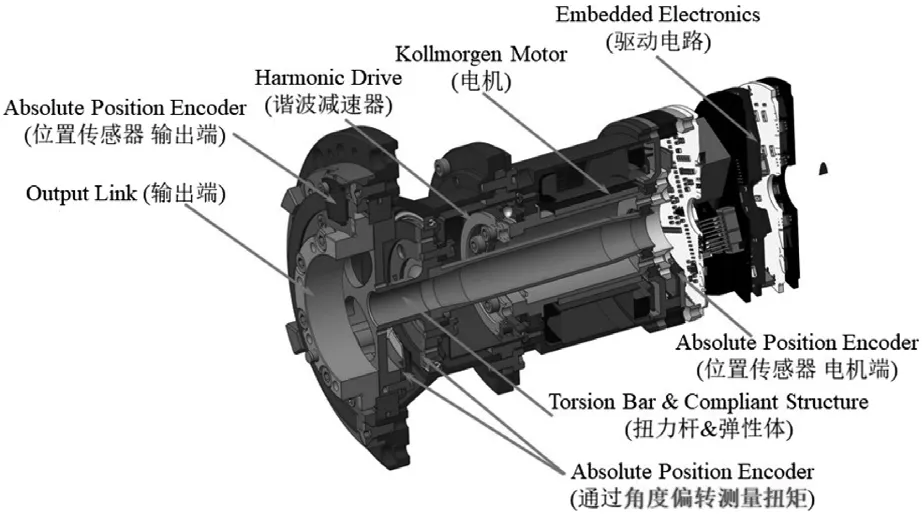
图1 关节示意图
2)基于Ethercat总线通讯的双臂协作机器人的控制技术。目前机器人的控制是用Ethercat总线通讯的,所以整机控制设计时也是采用Ethercat总线通讯,这样在最大程度上保留原有的通讯方式,而且可以再现有的基础上进行开发,目前双臂协作机器人的整机通讯也是基于Ethercat总线通讯。上位机通过Ethercat总线和PLC通讯进行精准控制。通讯无延迟,精准控制。
3)双臂协作机器人在家电生产线、汽车生产线上的应用,提高生产线的自动化和安全性。定位于冰箱涂胶场景,设计胶枪安装在机器人末端,人工拖拽示教后轨迹复现,让机器人走人工示教的涂胶路径,配合机器人控制系统,输出涂胶控制程序,实现冰箱门自动涂胶。定位场景二是汽车车门焊装,目前大部分车门组装都是采用人工涂胶或者三轴涂胶。人工涂胶效率低,质量不可控。三轴涂胶面对一些复杂曲面时调试相当困难,需要长时间的调试,而且采用三轴涂胶同样需要采取安全措施,防止工人受伤。采用双臂协作机器人,可以灵活进行涂胶工作,而且不需要设置安全装置。协作机器人万一碰到工人也会自动停止不会产生伤害。更加适合现有的应用场景。
4)基于ROB(Robot Operating System)架构的双臂协作机器人操作系统研究。软件部分主流是工控机采用Linux系统来控制,主要的操作系统架构采用ROS(Robot Operating System)。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。它包含了大量工具软件、库代码和约定协议,旨在简化跨机器人平台创建复杂机器人行为。主体消息采用TCP/IP传输统筹各节点之间的运作,可以处理异步数据流和同步数据流。ROS软件平台用于其他自动化设备上,如物料传递的两轴或者四轴的机器臂上。研究的工控机可以在CNC设备上进行应用,与各运动部进行EtherCat总线通讯,负责相关的运动轨迹。
5)协作机器人人体工程学研究。设计出一款符合人类审美,同时满足相关力学计算需求的机器人,以此作为机器人外观设计的基础。机器人设计图如图2所示,机器人样机如图3所示。
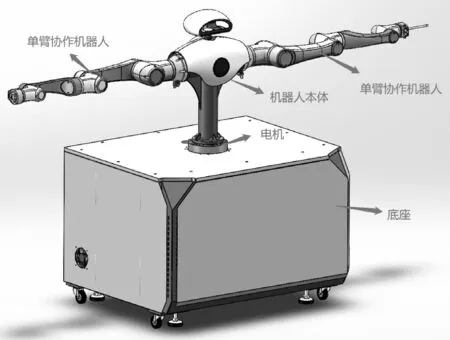
图2 机器人设计图

图3 机器人样机
2.1 示教技术的研究
目前大多数机器人还需要使用示教器进行示教,示教速度较慢,需要专业工作人员才能操作,这对于机器人的导入是十分不便的。所以,结合现有成熟的工业机器人技术,与协作机器人的控制相融合,研发出一套更加成熟的控制系统。开发人机示教功能,普通的操作人员直接拉动机器人在工件上进行路径的规划,操作人员可以根据实际需求拖拽着机器人手臂配合工具在工件上进行操作,机器人在人机示教功能下会根据拖拽的力度给出相应的运动速度,这个反向运动速度跟人移动的速度一致,所以操作人员不会感觉到吃力,通过算法优化,操作人员甚至以自己都感觉不到的力量就能完成拖拽示教,控制器自动记录路径,完成示教后,操作人员只需要在示教器上点按保存路径按钮即可完成路径记录,这样需要整机调试的时候只需要确定原点和起始点就能完整地完成调试工作了,大大降低了机器人示教的难度和提高了示教的效率。
2.2 机器人负载与协作安全性关系的研究
使用两个单臂负载为5 kg的协作机器人,根据现有的成熟协作机器人我们自行搭建设计一套双臂协作机器人,在保证其协作安全性的前提下,成倍地提高了机器人的负载。开发一套全新的控制技术,使两个单臂协作机器人能够用一套控制器进行控制,每个机械臂的力矩报警跟原来还是一样的,但是负载就增加了一倍。在机器人腰部再增加一个旋转关节,使机器人的柯达范围更广,实现安全高可靠性的工作。在控制方面,不去改变每个关节的力矩报警值,同时将机器人两个手臂的十二个轴和腰部的轴联动控制,任何一个关节报警,整机都会停止运作。这个技术解决了机器人负载与协作能力的矛盾,提高了协作机器人的负载但又不影响其协作功能。完善了控制技术的漏洞,使协作机器人的故障率大大降低。
2.3 基于ROB(Robot Operating System)架构的双臂协作机器人操作系统研究
开发一套基于ROB(Robot Operating System)架构软件,开发友好的人机操作界面,实现机器人的布置、视觉匹配、机器人示教等,解决了机器人行动轨迹发生变化时,需要人工编程的问题,有效降低了调试时间以及学习成本。软件部分主流是工控机采用Linux系统来控制,主要的操作系统架构采用ROS(Robot Operating System)。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。它包含了大量工具软件、库代码和约定协议,旨在简化跨机器人平台创建复杂机器人行为。主体消息采用TCP/IP传输统筹各节点之间的运作,可以处理异步数据流和同步数据流。ROS软件平台用于其他自动化设备上,如物料传递的两轴或者四轴的机器臂上。研究的工控机可以在CNC设备上进行应用,与各运动部进行EtherCat总线通讯,负责相关的运动轨迹。通讯架构示意图如图4示,智能机器人软件系统如图5所示。
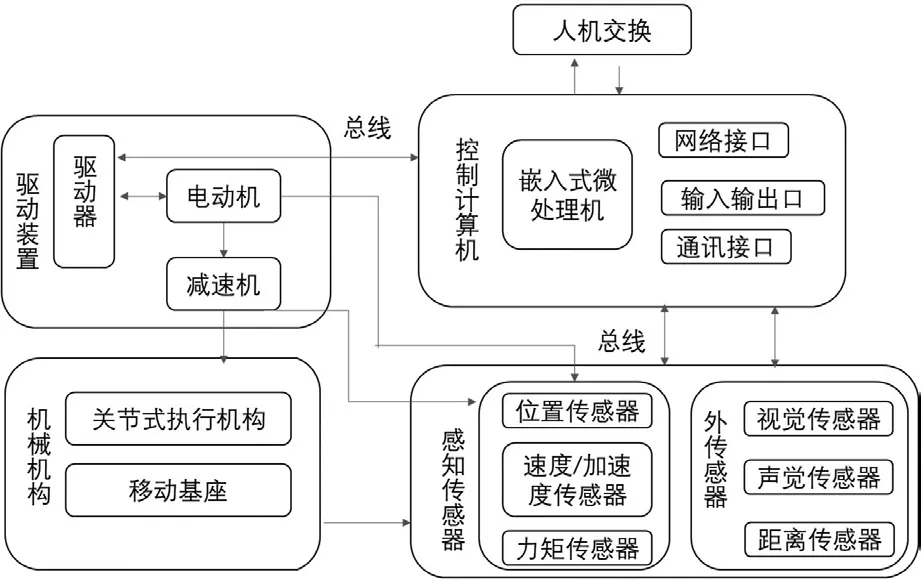
图4 通讯架构示意图
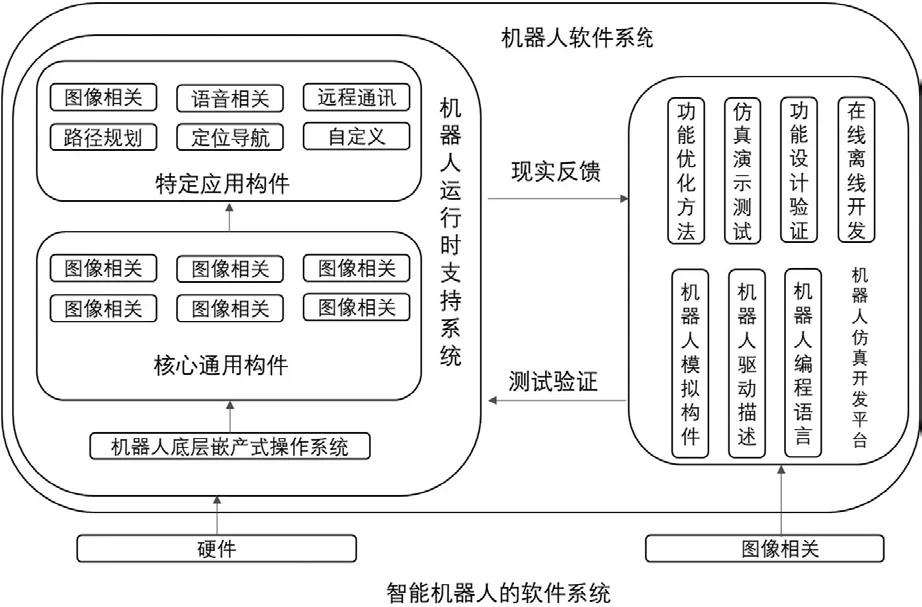
图5 智能机器人软件系统
2.4 多关节协作示教技术的研究
协作机器人可以自动控制和进行编程,同时可和工人在一个工作区域中产生近距离的交互并进行协同作业的智能机器人。相比于传统机器人,协作机器人不仅能应用于工业场景的限制,并且它凭自身轻量化、灵活性、方便控制性、快速配置性、工作空间限制性小的特点,在医疗、教育培训、新零售等服务业场景中的潜力无限。使用自主设计的拖拽示教功能,解决了目前机器人示教难和慢等问题,同时也降低了机器人操作员工的要求,一般工作人员经过简单的培训也能快速掌握机器人的使用与调校。但由于在示教过程中,给定点位信息,机器人也可以存在无数种姿态,在一些简单的场景下,机器人的姿态对工作是不影响的。但是在某些环境下,机器人的姿态需要调整避免与工件干涉,所以,各个关节必须能够自我调整,在机器人臂碰到或者将要碰到的时候会反馈信号到主机控制器,控制器用算法优化,自动调整机器人姿态,同时保证TCP不变,不影响实际的工具坐标和现有的点位。
3 协作机器人先进性
1)应用场景可迅速转换;当工作场景切换后,机器人更换夹具后不需要专业的调试工作人员用示教器进行示教,只需要使用协作机器人的零力拖拽示教功能就可以了。普通工人直接拖拽手臂进行路径规划,机器人直接记录并复现,提高了示教的效率。
2)内置视觉软件和相机;在双臂机器人的头部增加视觉模组,对工件进行拍摄取样,快速精确地获取工件信息,精确定位。
3)可与人协同工作,安全可靠;协作机器人可以与工人共同在同一区域进行工作,无需安全围栏,即使机器人碰到工人也会立即停止,而产生的碰撞力也是人类可以接受的,不会导致受伤。
4)编程简单易操作,可示教学习;采用模块化指令,直接调用,在线编程只需要拾取关键点就能自动生成所需要的路径,结合零力拖拽示教功能,更加方便快捷。
4 总结
协作机器人的开发,填补了工业机器人在工业4.0进程上的一个短板,他可以灵活替代工人劳动而且可以安全地与工人一起协同工作,动作比传统的工业机器人可以更加灵活灵敏。同时,协作机器人也是传统的工业机器人的机械感大大降低,协作机器人外形更像人类手臂,而且协作机器人各关节具有安全力矩反馈,是得机器人本人对安全有了“感觉”,能够保障协作机器人身边的人以及设备,不再像工业机器人一样机械地运行程序。开发一套成熟的协作机器人,在不久的将来就能和谐地与人类共同工作,替人类完成笨重而危险的工作,甚至能替代人类完成工作。
