SCR脱硝系统的分数阶PIλDμ参数优化控制
2022-02-23李其贤王东风申朋宇
黄 宇, 高 珊, 李其贤, 丁 鹏, 王东风, 申朋宇
(1.华北电力大学 自动化系,河北保定 071003;2.保定电力职业技术学院 动力工程系,河北保定 071051)
据统计,煤炭燃烧是造成氮氧化物排放的主要原因。我国电力工业仍以燃煤为主,燃煤电厂是氮氧化物的主要排放源之一。NOx排放会形成酸雨,在阳光辐射的条件下与其他污染物发生反应,产生对人类健康有害的光化学烟雾。随着环保法规的日趋严格以及人们环保意识的不断增强,控制燃煤电厂的NOx排放成为一个亟须解决的问题。
目前,选择性催化还原(SCR)脱硝技术是我国燃煤电厂控制NOx排放应用最广、效果最好的方法之一,可以达到较高的脱硝效率,而且对工业条件的要求也很低。在SCR脱硝过程中,通常使用常规的比例积分微分(PID)控制策略,然而SCR脱硝系统存在较强的扰动特性和未建模动态特性,使得传统PID控制器难以精确控制SCR脱硝系统。牛玉广等[1]对SCR脱硝控制系统进行改进和优化。周洪煜等[2-3]利用神经网络建立SCR脱硝系统数据模型,实现了系统喷氨量的最优控制。马增辉等[4]在鲁棒PID控制器的基础上,利用鲁棒时滞滤波器提高了SCR脱硝系统的抗干扰能力。秦天牧等[5]利用自适应智能前馈控制方法,实现了喷氨量的准确、及时调节。罗志浩等[6]将改进的动态矩阵控制(DMC)算法用于脱硝控制系统,该算法具有良好的响应特性,有效提高了系统的抗干扰能力。上述控制策略的研究方向各异,大部分能够实现脱硝优化控制,使控制品质有一定程度的提升,但有些控制算法十分复杂,应用到工业生产的案例有限。为此,笔者在不改变原有脱硝控制系统组态的基础上,将分数阶PIλDμ(其中λ为积分阶次,μ为微分阶次)控制引入到SCR脱硝系统,以期解决SCR脱硝系统的控制问题。
分数阶PIλDμ控制器由Podlubny[7]提出。目前的应用成果表明,分数阶PIλDμ控制对外部扰动不敏感,能有效地提高系统的抗干扰能力及其动态特性。Alimohammadi等[8]将分数阶PIλDμ控制应用到磁悬浮系统的内回路控制中,有效提高了其抗干扰性。戚壮等[9]将分数阶PIλDμ控制应用到轻轨车辆的边驱传动系统,有效提高了受控轮对的抗轨道不平顺激扰能力。王晓寸等[10]在逆变电源中加入分数阶PIλDμ控制,极大改善了系统的动态性能,提高了其抗干扰能力。以上应用系统中均存在较强的扰动特性,分数阶PIλDμ控制器的引入使系统具有较好的控制效果。由此,针对SCR脱硝系统存在的强扰动特性,笔者提出将分数阶PIλDμ控制引入SCR脱硝控制系统,但是分数阶PIλDμ控制器参数较多,在获得较好控制效果的同时也提高了控制器参数的优化整定难度。

1 SCR脱硝控制系统动态分析
SCR脱硝是指在催化剂的作用下,还原剂与烟气中的NOx发生反应,生成无毒无污染的N2和H2O。在上述化学反应过程中,由于喷氨量难以控制,无法有效脱除烟气中的NOx,会造成机组设备损坏。因此,在保证脱硝效率的情况下,需要设计精准的SCR喷氨控制系统。
1.1 传统SCR脱硝控制存在的问题
在工程应用中,SCR脱硝系统普遍采用串级PID控制,实现脱硝喷氨自动控制的方式主要有固定摩尔比控制、固定出口浓度控制和复合控制3种。固定摩尔比控制由于仅关注脱硝效率,没有考虑出口NOx质量浓度变化,容易造成过度脱硝的现象;固定出口浓度控制侧重考虑出口NOx质量浓度变化,容易导致喷氨过量,对环境造成污染;复合控制综合考虑脱硝效率和催化剂脱硝能力,不仅能够防止SCR脱硝系统出口NOx质量浓度超标,还能确保氨的逃逸率不超标[15]。虽然复合控制相对于前2种方式的控制效果较好,但由于受到火电机组的燃烧工况变化、氨浓度变化和催化剂活性等影响,系统呈现出较强的扰动特性,常规PID控制难以达到精准的控制效果。
为解决上述控制方式存在的问题,实现SCR脱硝系统出口NOx质量浓度的准确控制,在不改变原有控制系统结构的基础上,提出一种基于复合控制方式的分数阶PIλDμ控制策略。
1.2 SCR脱硝系统的分数阶PIλDμ控制
SCR脱硝控制系统采用串级系统结构[16]。主回路采用分数阶PIλDμ控制,控制器根据脱硝入口烟气中NOx质量浓度的设定值与测量值之间的偏差修正所需的氨气流量;副回路首先通过主回路分数阶PIλDμ控制器修正的喷氨量和前馈回路的喷氨量共同作用得出设定喷氨量,然后采用传统PID控制器计算喷氨量设定值与实测氨气流量的差值,调整喷氨阀门开度以实现氨气流量的控制。基于分数阶PIλDμ控制的SCR脱硝系统结构框图如图1所示,其中f为函数,e为误差。f函数的作用是将入口NOx质量浓度与烟气流量相乘得到NOx质量流量。NOx质量流量乘以固定氨氮摩尔比得到SCR反应器入口的氨气流量。f函数的数学表达式如式(1)所示。干扰信号d包含火电机组燃烧工况的改变、催化剂活性等干扰。
f=q×ρ
(1)

图1 SCR脱硝分数阶PIλDμ控制系统结构框图
图1中,氨气流量对出口NOx质量浓度的传递函数Ga(s)[17]为:
(2)
控制阀门开度对氨气流量的传递函数Gb(s)[18]为:
(3)
由于SCR脱硝系统中存在较多的扰动,如入口NOx质量浓度的改变、氨浓度变化引起系统喷氨量的变化以及脱硝反应的副反应产物引起催化剂活性的改变等。以上干扰都会对SCR脱硝系统的控制效果产生不良影响,因此将分数阶PIλDμ控制器引入到SCR串级控制系统,可以克服上述不确定性干扰的影响。
2 分数阶PIλDμ控制方案
相比传统PID控制,分数阶PIλDμ控制器具有更广的控制范围,可以通过改变分数阶次的系数,在满足系统稳定性的同时实现较强的系统控制能力。分数阶PIλDμ控制器的传递函数Gc(s)为:
(4)
式中:λ≥0;μ≥0;KP为比例增益;KI为积分系数;KD为微分系数。
显然,当λ和μ都为1时,式(4)为传统PID控制。传统PID控制器积分环节的作用是提高系统稳定精度,但会导致系统相角出现90°滞后的现象;微分环节可以改善系统的动态性能,但对系统的抗干扰性有一定的影响。分数阶PIλDμ控制器可以通过调节积分阶次,适当考虑系统的滞后相角,改善系统的动态性能;分数阶PIλDμ控制器也可以通过改变微分阶次,更加灵活地调节系统的阻尼程度,提高系统的抗干扰能力。
3 带CMA-ES采样器Optuna优化算法
3.1 Optuna
Optuna是由日本深度学习公司Perferred Networks提出的一种自动化超参数/参数优化框架,其定义只有3个核心的概念,即目标函数、单次试验和研究[14]。在优化过程中,Optuna通过反复调用并评估不同参数值的目标函数获取最优解。
Optuna优化算法的具体流程如下:(1) 初始化,确定优化方向、参数类型、取值范围和最大迭代次数;(2) 进入循环;(3) 在定义参数取值范围的目标函数内均匀选择种群个体;(4) 修剪器按修剪条件自动终止毫无希望的种群个体;(5) 计算未被修剪的种群个体目标函数值;(6) 重复以上步骤,直到达到最大迭代次数,跳出循环;(7) 输出最优解及最优目标函数值。
从上述流程中可以看出,首先通过创建一个研究框架,指定优化方向和迭代次数等,然后调用目标函数,单次试验在定义参数取值范围的目标函数内均匀选择种群个体,然而此获取参数的方式极大降低了Optuna的收敛速度,影响其优化效率。因此,笔者将CMA-ES的采样原理引入Optuna,以提高参数优化性能。
3.2 CMA-ES算法
CMA-ES算法是由Hansen[19]提出的优化算法,利用高斯分布采样优化问题的解空间,使用其中较好的解对高斯分布的参数进行更新,在满足停止条件之前,不断重复采样和更新的过程。CMA-ES算法的具体步骤如下:
(1) 采样新解。CMA-ES算法在待优化问题的解空间中随机选择一个解,然后根据正态分布生成的种群如下:
(5)
式中:xi为种群中第i个个体;α为种群大小;g为进化代数;m为搜索分布的均值;σ为步长;C为种群的协方差自适应矩阵,初始的C可以设置为一个D×D的单位矩阵,其中D为解的维度。
(2) 更新均值。在生成的种群中选择一部分最优解作为子种群,新的种群期望值为:
(6)
(7)
式中:β为子种群大小;wi为正权值;xi:α为在种群的α个个体中选择出的第i个最好个体。
(3) 更新协方差自适应矩阵。通过更新协方差自适应矩阵,引导整个种群搜索全局最优解。协方差自适应矩阵的更新公式如下:
(8)

(9)
初始pc为0,pc更新过程如下:
(10)
式中:cc为进化路径pc的学习率。
式(10)中步长σ的更新过程如下:
(11)
式中:E()为数学期望函数;I为单位矩阵;cσ为步长的学习率;dσ为步长更新的阻尼系数;pσ为步长的进化路径,初始pσ为0,其更新过程如式(12)所示。
(12)
CMA-ES算法按上述步骤不断循环,逐步求得最优解。
3.3 带CMA-ES采样器Optuna优化算法流程
Optuna具有结构简单、优化数据方便分析等特性,但其收敛速度相对较慢,而CMA-ES算法可以通过控制步长实现快速收敛。因此,笔者将CMA-ES算法与Optuna相结合,提出带CMA-ES 采样器Optuna优化算法,该算法将CMA-ES采样原理引入到Optuna中,其流程图如图2所示。
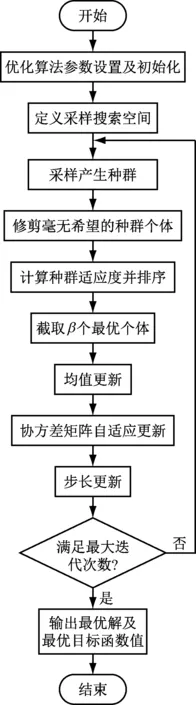
图2 带CMA-ES采样器Optuna优化算法流程图
4 仿真实验
为验证本文优化算法的适用性,将其与无采样器Optuna优化的分数阶PIλDμ控制、带采样器Optuna优化的传统PID控制、无采样器Optuna优化的传统PID控制进行对比实验,并从设定值跟踪、抗干扰及鲁棒性等方面分析SCR脱硝控制系统性能。选择误差绝对值积分(IAE)为目标函数,IAE的表达式如式(13)所示,首先采用临界比例带法整定副回路的传统PID控制器参数,然后将控制器参数代入副回路中并将副回路等效为被控对象的一部分,最后根据上述优化算法分别获得主回路分数阶PIλDμ控制器或传统PID控制器的参数。优化控制器参数时,Optuna迭代次数设置为100,参数类型为浮点型,获取剪枝中位数执行的步数为50,分数阶PIλDμ控制器参数的取值范围为:KP∈[0,3.5],KI、KD∈[0,1],λ、μ∈[0,2]。传统PID控制器参数的取值范围为:KP∈[0,3.5],KI、KD∈[0,1]。以误差绝对值积分最小为优化目标,4种控制方案的控制器表达式如表1所示。其中G1(s)、G2(s)、G3(s)和G4(s)控制方案下的最优目标函数值分别为127.626、142.323、148.274和185.150。
误差绝对值积分J的表达式为:

(13)
式中:t为时间。

表1 4种控制方案的控制器表达式
4.1 设定值跟踪实验
为验证SCR脱硝控制系统的设定值跟踪能力,给系统加阶跃设定值r=1,经过仿真后,系统在4种控制器下的单位阶跃响应曲线如图3所示,设定值误差绝对值积分如图4所示。

图3 SCR脱硝系统在4种控制器下的单位阶跃响应曲线
由图3和图4可知,4种控制方案下系统的输出最终都能无差跟踪设定值,与其他3种控制方案相比,G1(s)控制方案下的系统误差绝对值积分最小,响应曲线无振荡且能比较快速达到设定值。由此可见,带采样器Optuna优化的分数阶PIλDμ控制系统具有较好的设定值跟踪能力。
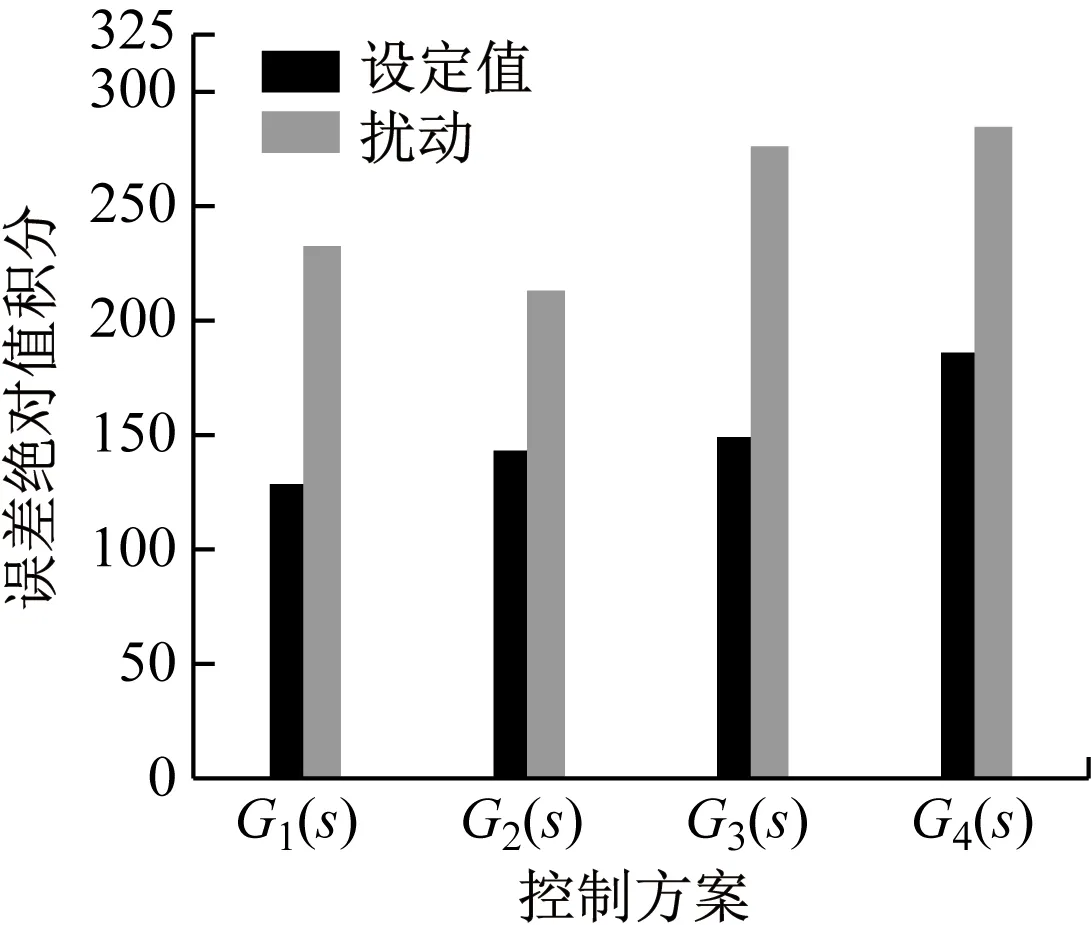
图4 SCR脱硝系统在4种控制器下的误差绝对值积分
4.2 抗干扰实验
为了进一步验证系统的抗干扰性,当t=2 000 s时,在主回路加入r=0.2的阶跃扰动,系统在4种控制器下的扰动响应曲线如图5所示。由图4和图5可知,SCR脱硝系统在分数阶PIλDμ控制器下的误差绝对值积分相对较小,当加入阶跃扰动后,4种控制方案都具有一定的抗干扰能力,相比于其他3种控制方案,G1(s)控制方案下的系统输出响应曲线恢复到设定值的时间较短。由此可见,该系统在分数阶PIλDμ控制下的抗干扰能力更好。

图5 SCR脱硝系统在4种控制器下的扰动响应曲线
4.3 鲁棒性实验
在实际的工业生产中,SCR脱硝控制系统不只需要较好的设定值跟踪和抗干扰能力,还需要较强的鲁棒性。为了验证优化算法的鲁棒性,通过蒙特卡洛实验进行检验[20],并将G1(s)与G3(s)控制方案进行对比。对SCR脱硝系统主被控对象分母的二次系数发生±30%的随机摄动,生成50个模型的被控对象簇{GM(s)},以模拟SCR脱硝控制系统模型与实际设备之间的偏差。在单位阶跃响应下G1(s)、G3(s) 2种控制方案的被控对象簇{GM(s)}输出响应分别见图6和图7。
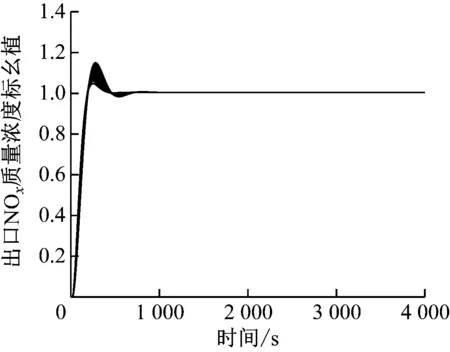
图6 G1(s)控制方案下的蒙特卡洛实验结果

图7 G3(s)控制方案下的蒙特卡洛实验结果
G1(s)和G3(s) 2种控制方案下蒙特卡洛实验性能指标分布如图8所示,2种控制方案下设定值阶跃的系统性能参数如表2所示。从图3~图8和表2可得:所提出的G1(s)控制方案的调节时间远小于传统PID控制,且其超调量也相对较大,但超调量的标准差相对较小,表明G1(s)控制方案的鲁棒性较强。当主回路被控对象分母的二次系数发生±30%的随机摄动时,G3(s)控制方案下的点集相对分散,分布在2个区域,而G1(s)控制方案下的点集相对集中,且G1(s)控制方案的调节时间和超调量的标准差都比G3(s)控制方案小。因此,带采样器Optuna优化的分数阶PIλDμ控制具有较强的鲁棒性。
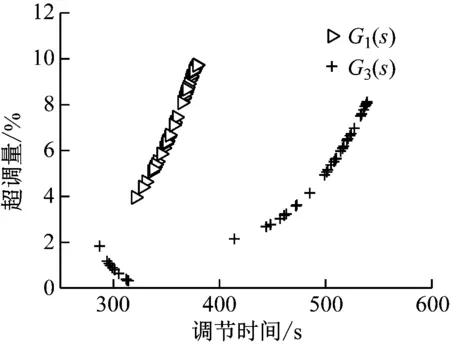
图8 2种控制方案下设定值阶跃的蒙特卡洛实验性能指标分布

表2 2种控制方案下设定值阶跃的系统性能和鲁棒性指标统计表
综合SCR脱硝系统在设定值跟踪、抗干扰和鲁棒性3个方面的分析验证,SCR脱硝系统采用带采样器Optuna优化的分数阶PIλDμ控制具有更好的控制效果。相对于传统PID控制,分数阶PIλDμ控制器以其较好的设定值跟踪能力,实现了SCR脱硝系统喷氨量的精确控制,延长了设备的使用寿命。所提出的SCR脱硝控制方案因其强抗干扰和强鲁棒性,有效地降低了未知不确定性因素对系统造成的影响。
5 结 论
针对SCR脱硝系统存在的强扰动和不确定的特性,提出了带CMA-ES采样器Optuna优化的分数阶PIλDμ控制方案。利用仿真实验验证了分数阶PIλDμ控制器的控制效果,并与带采样器Optuna优化的传统PID控制、无采样器Optuna优化的分数阶PIλDμ控制及传统PID控制方案进行对比。结果表明,带CMA-ES采样器Optuna优化分数阶PIλDμ控制方案在火电厂SCR脱硝控制系统中具有良好的设定值跟踪能力、抗干扰能力及鲁棒性,本方案更适合应用于SCR脱硝控制系统。
