融合检测区标定与特征点识别的车速估计方法研究
2022-02-22赵丽丽唐阳山
赵丽丽,张 丽,唐阳山
融合检测区标定与特征点识别的车速估计方法研究
赵丽丽1,张 丽2,唐阳山1
(1.辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001;2.锦州市公共交通有限责任公司,辽宁 锦州 121001)
针对目前人工标定特征点存在误差大等不足之处,提出了一种自动识别特征点的方法。首先设定合适的检测区进行摄影测量时的相机标定,其次利用图像预处理、图像分割及形态学滤波处理(图像膨胀、开运算)等去除噪点,从而识别出车辆轮胎,利用函数bwtraceboundary来获取轮胎边界,然后依据圆的各种公式来获取相应的参数,求出轮胎的半径。同时再对其圆心进行标记,从而标注出轮胎中心点,进而精确识别轮胎中心特征点及其坐标。并通过坐标转换关系确定特征点的实际坐标,最后运用交通事故视频车速鉴定标准进行车速估计,从而实现提高测速精度的目的。实验验证表明,利用该方法对车速进行估计,其估计结果误差降低了3.07%。
检测区标定;特征点识别;车速估计
随着我国道路交通的飞速发展,汽车保有量日益增多,道路交通压力也越来越大,发生交通事故的频率也越来越高,给我国人民群众造成了不可估量的损失。由于车速的鉴定结果不仅可以分析交通事故的性质,确定交通事故发生的原因,而且是对交通事故责任认定进行划分的重要依据[1]。为此,许多国内外学者在视频测速领域进行了分析研究,如:Xiao[2]提出通过测量相邻图像间特征点的移动位移,选取车厢前后连接点为特征点,并利用逆透视变换来减小坐标标定误差来计算车速的。Luvizon等[3]是在车牌区域上选择不同的特征,跨多个帧进行跟踪,通过比较跟踪特征的轨迹和已知的真实测量方法来测量车速的。Cathey等[4]提出了一种自动计算相机足够的校准信息,从而产生可靠的速度估计,即采用矫直技术消除透视效应,并采用相关技术建立必要的尺度因子,利用视频帧之间的时间相关性进行速度估计。张重德等[5]提出了一种提高视频测速精度的方法,即利用路面上的车道线和2条添加的横向标志线而组成检测标定区,应用二维图形变换算法进行图像与地面坐标的转换,进而获得实际行驶距离。武非凡等[6]通过计算多帧之间瞬时速度的平均值来实现车辆速度的测量。同志学等[7]是将摄影系统安装在车上,利用远距点对和近距点对估算坐标系的旋转矩阵和平移矢量,并根据优化后的旋转矩阵和平移矢量计算出车辆的行驶速度。贾常明[8]利用车辆行驶距离与车体横向放大率的关系式,间接获得车辆行驶距离,从而鉴定车速。刘虹伯[9]选取车辆轮胎接地点为特征点,建立了新的车速计算模型。
通过阅读大量文献,针对人工标定特征点存在误差大等问题,提出了融合检测区相机标定与自动识别特征点的方法,从而精确获得特征点的坐标。最后运用交通事故视频车速鉴定标准估计车速。
1 改进的相机标定方法
1.1 检测区域的确定
在智能交通领域,视频测速是通过对车辆监控信号进行分析而获得目标车辆行驶速度的一种方法。在此过程中需选择合适的检测区域,以便提高检测效率,在选择检测区域时,需在事故现场划定检测区域,划定检测区域需注意以下几点:
(1)根据事故车辆发生位置合理的选择检测区域;(2)根据道路环境状况,检测区应设定在对视频图像观察无影响的区域;(3)尽量选择有路面标线(如人行道、车道线)的位置进行划定标志线。
本文提出的检测区域设置原理见图1,摄像头位于检测区上方,lAB、lCD是为建立检测区范围而在实际路面上画的标志线,与车道线构成矩形检测区域。但由于透视投影引起的“近大远小”现象使图像距离不同于实际距离。为使车速得以精确测量,在图像平面与三维空间之间寻找变换关系。
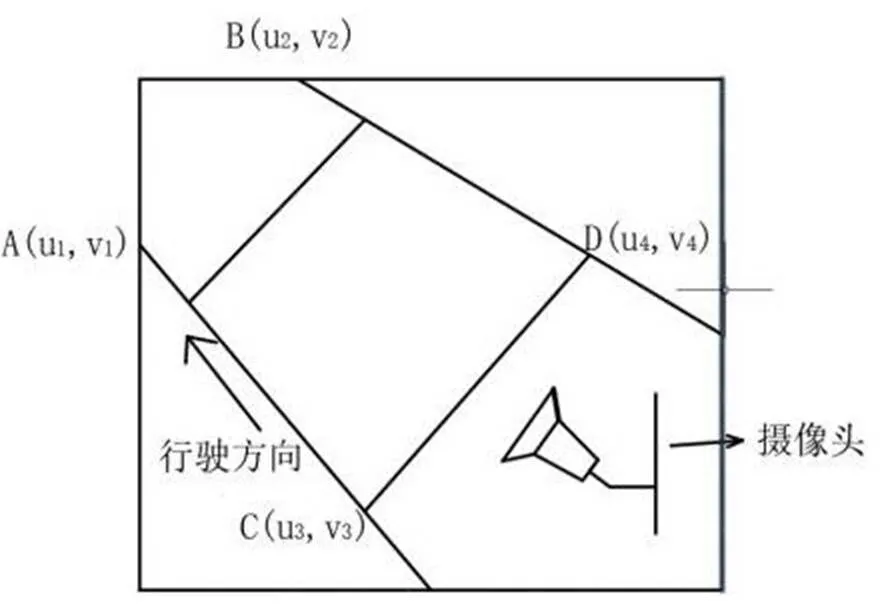
图1 检测区域设置原理图
1.2 相机标定
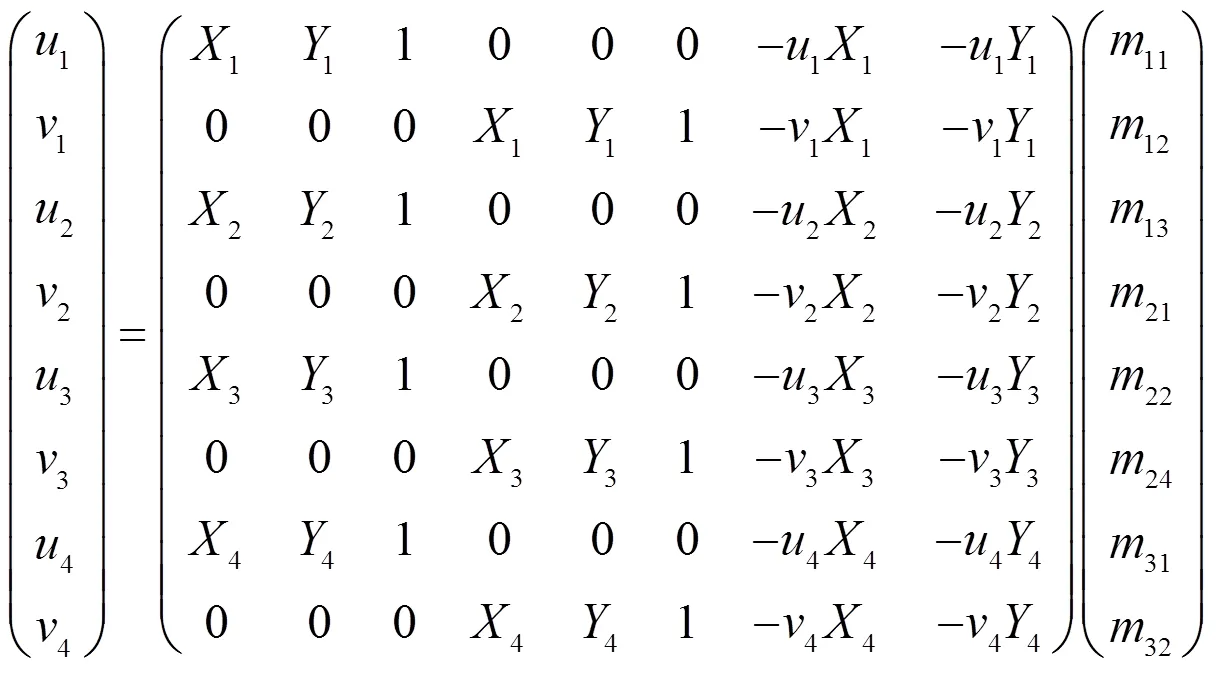
由摄影成像原理(见图2)可得,图像像素坐标系与世界坐标系的直接变换关系如式(1)所示。

图2 相机标定流程图

其中:(,)为图像像素坐标系内一点P的坐标,(X,Y)为点P所对应的世界坐标系中的坐标。11~32为待求参数。
由式(1)可知,方程中有8个未知量,每代入一组区域特征点的图像坐标和对应的世界坐标即可解出2个方程,因此,只要获得目标平面上4个顶点的世界坐标和图像坐标即可解出图像坐标系与世界坐标系的转换关系,4个顶点所围成的区域为标定区域,具体透视矩阵参数方程如式(2)所示[10]。
在图像中通过图像处理可直接获得4个顶点的图像坐标,其对应的三维空间坐标可直接在事故现场测量获得。解出式(2)中参数后,即可获得图像坐标与真实坐标的转换关系。
2 特征点的识别
本文选取目标车辆的轮胎中心为特征点进行车速计算,因此需要对车轮中心进行识别以获取车轮中心的坐标,其识别流程如图3所示。通过将交通事故视频导入MATLAB中进行图像采集,根据所采集到的图像对目标车辆进行检测,然后对目标车辆轮胎进行定位后识别轮胎中心点,最后获取轮胎中心坐标。根据所获取到的轮胎中心坐标,计算目标车辆的车速。
2.1 图像预处理
在对图像的采集过程中,由于车轮表面的污渍、天气状况、照明条件等因素导致采集的图像存在一定干扰和噪声,而图像预处理可以有效地突出车辆图像的有用信息,消除或减少无用信息,从而提升车辆轮心识别的准确率和识别率[11]。因此,在对轮心识别前需对采集到的图像进行预处理。根据车辆特性和采集图像的特征,设计图4所示预处理流程。
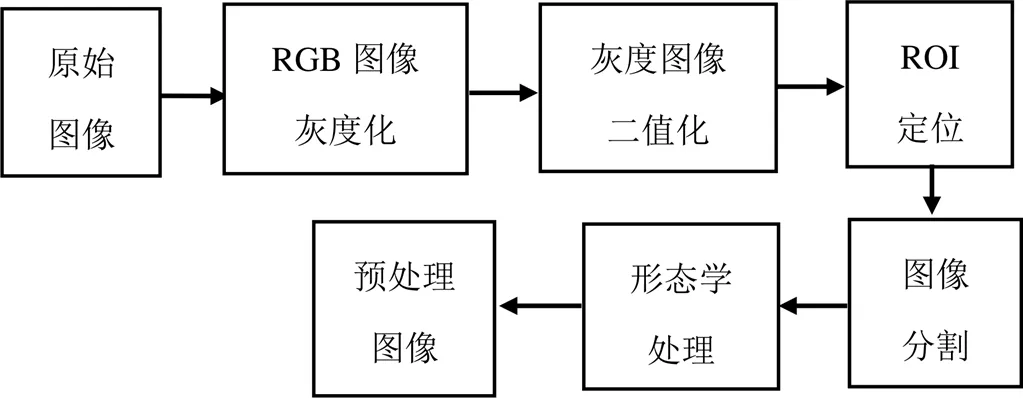
图4 图像预处理流程图
ROI即感兴趣区域,为包含目标的区域,通过ROI定位选择车辆轮胎为感兴趣区域可以大大减少之后步骤的运算量[12],因此本文通过ROI定位及对图像进行适当裁剪获得见图5(a)所示轮胎图像,为了处理上的方便,把RGB真彩色图像转化为灰度图像,然后使用合适的阈值将灰度图像转化为二值图像,见图5(b)[13]。通过对二值化图像进行图像分割、形态学图像滤波处理(图像膨胀、开运算等)去除噪点,进而识别出车辆轮胎见图5(c)[14]。
2.2 车轮中心特征点识别
对于圆形的目标物体来说,半径是一个至关重要的参数,由于半径的大小决定着圆形的目标物体的面积及周长的大小,还决定着圆心的坐标位置,因此本文还需要确定车辆轮胎半径的大小[15]。计算轮胎的半径时,需要对轮胎边界进行获取,因此首先利用函数bwtraceboundary来获取轮胎边界,然后依据圆的各种公式来获取相应的参数,最后求出轮胎的半径。同时再对其圆心进行标记,从而标注出轮胎中心点如图5(d)所示。

图5 特征点识别图
3 实例验证
3.1 事故背景
基本案情:2021年10月22日13时50分许,一辆小型越野客车(以下简称甲车)由东向西行驶与一辆小型轿车(以下简称乙车)由南向北行驶,在某路口相撞,发生道路交通事故。
3.2 实验结果
3.2.1 检测区域的确定
根据视频图像中两车辆的碰撞位置及道路环境特征,本文选用如图6的一个以A、B、C、D为顶点的矩形检测区域,由于摄像机“近大远小”现象而使矩形检测区域在图像上呈梯形状。

图6 检测区域图
3.2.2 相机参数的标定
利用MATLAB图像处理及识别技术获取视频图像中检测区域的4个顶点的坐标,并通过实际测量可获得这4个顶点的实际坐标如表1所示。

表1 检测区域4个顶点的坐标
根据表1数据,利用式(1)便可确定摄像机的待求参数,通过求解得出:11=16.9997,12=-3.3015,14=69.6628,21=-1.8768,22=24.3133,24=15.8006,31=-0.0241,32=-0.0073。
3.2.3 特征点坐标的确定
本文以44 s第20帧为例进行特征点的识别见图7,并获取轮心坐标,利用图像坐标与实际坐标的转换关系可求出特征点的实际坐标见表2。
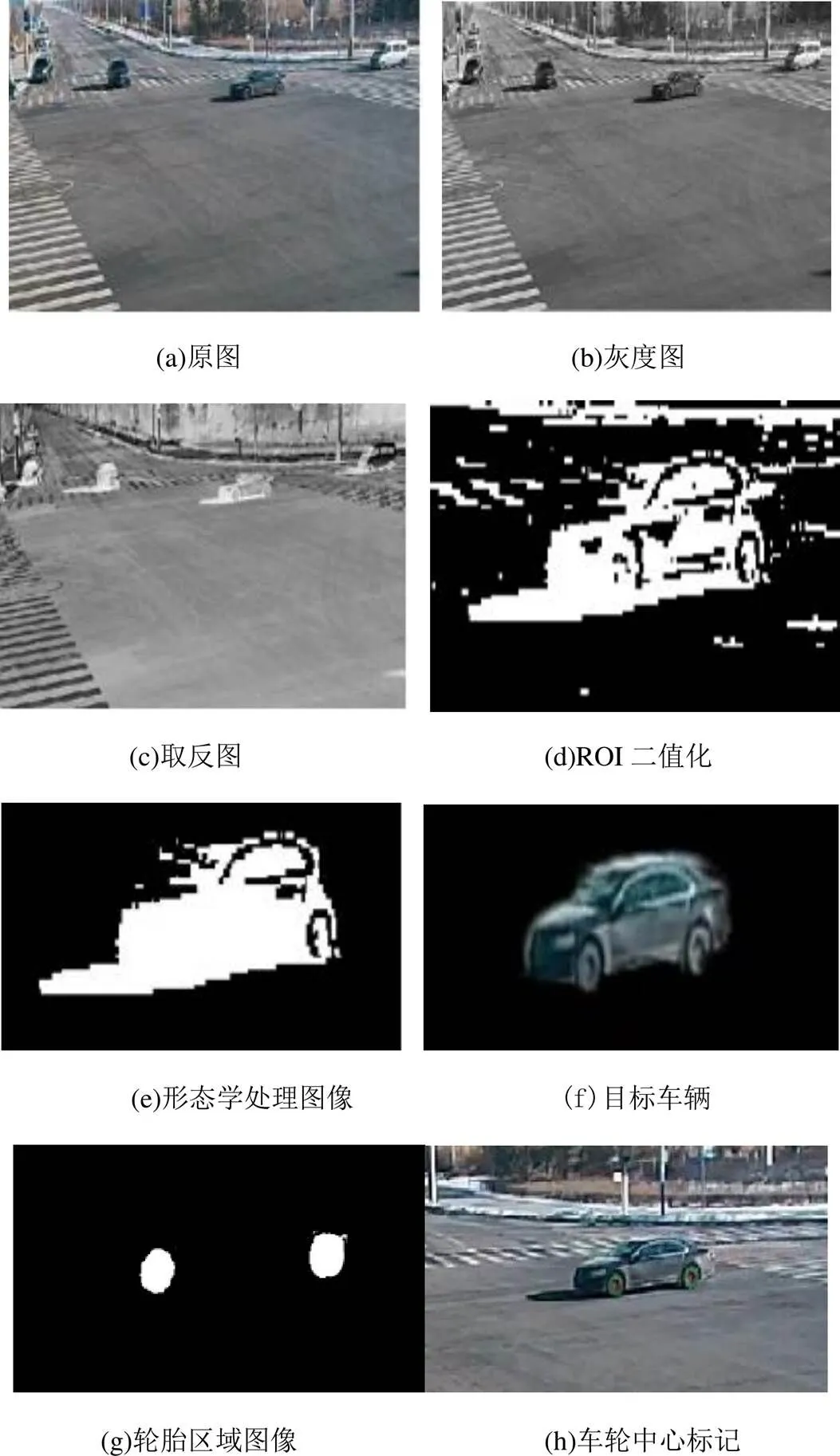
图7 44 s第20帧特征点识别图

表2 用于车速计算的不同帧特征点坐标
3.2.4 车速计算
根据表1与表2中数据,并运用交通事故视频车速鉴定标准中目标车辆直线行驶时的计算方法对甲车进行车速计算得出,根据本文特征点识别方法得出的特征点坐标,计算出甲车的车速为29.25 km/h。利用以人工方式识别特征点的方法计算出甲车的车速为30.14 km/h。而甲车的实际平均车速为29 km/h。经比较,本文所提出的方法使误差降低了3.07%。
4 结论
本文所提出的检测区的选定原则,不仅能排除由于道路状况(如凹凸不平,有遮挡物等)的干扰,而且能根据车辆的运动特点对检测区进行择优选取。其次,利用MATLAB中特征点的提取技术自动识别车轮中心,提高了特征点的坐标标定精度。最后利用交通事故视频车速鉴定标准来计算车速,分别运用本文所提出的特征点识别方法与传统的特征点识别方法来对交通事故车辆的车速进行鉴定,鉴定结果表明,本文所提出的方法可以提高车速的鉴定精度。
[1] 邱冉冉. 基于监控视频图像的交通事故车速计算方法研究[D]. 长春: 吉林大学, 2017.
[2] Xiao Xianbo. Vehicle Speed Detection based on video image processing[C]//International Conference on Computational Intelligence and Vehicular System. China: China Academic Journal Electronic Publishing House: IEEE. 2010: 323-325.
[3] Luvizon D C, Nassu B T ,Minetto R. A video-based system for vehicle speed measurement in urban roadways[J]. IEEE Trans on Intelligent Transportation Systems, 2017, 18(6): 1393-1404.
[4] Cathey F W, Dailey D J. A novel technique to dynamically measure vehicle speed using uncalibrated roadway cameras[C]//Proc of IEEE Intelligent Vehicles Symposium. Piscataway, NJ: IEEE Press, 2005: 777-782.
[5] 张重德, 张崇巍. 一种提高视频车速检测精度的方法[J].上海交通大学学报, 2010, 44(10): 1439-1443.
[6] 武非凡, 宋焕生, 戴喆, 等. 交通监控场景下的相机标定与车辆速度测量[J]. 计算机应用研究, 2020, 37(8): 2417-2421.
[7] 同志学, 赵涛, 贺利乐, 等. 基于双目视觉的工程车辆定位与行驶速度检测[J]. 中国机械工程, 2018, 29(4): 423-428.
[8] 贾常明.视频方法鉴定车速问题研究[J]. 光学技术, 2020, 46(5): 535-539.
[9] 刘虹伯. 基于视频的道路交通事故分析方法研究[D]. 西安: 长安大学, 2019.
[10] 龚思宇. 基于平面模板的摄像机标定及相关技术研究[D]. 长沙: 湖南大学, 2017.
[11] 张萍. 基于MATLAB的汽车牌照自动识别技术研究[J].自动化技术与应用, 2019, 38(11): 132-135.
[12] 杨杰, 占君, 周至清, 等. MATLAB图像函数查询使用手册[M]. 北京: 电子工业出版社, 2017.
[13] 张强, 王正林. 精通MATLAB图像处理[M]. 北京: 电子工业出版社, 2012.
[14] 代艳萍, 郑彬, 张健. 基于光学相控阵的交通视频图像运动目标检测方法[J]. 激光杂志, 2021, 42(7): 45-49.
[15] 许国洪, 刘宏飞. 道路交通事故分析与处理[M]. 北京:人民交通出版社, 2019.
Study on Vehicle Speed Estimation Method Based on Detection Area Calibration and Characteristic Point Identification
ZHAO Li-li1, ZHANG Li2, TANG Yang-shan1
(1. School of Automobile and Traffic Engineering, Liaoning University of Technology, Jinzhou 121001, China;2.Jinzhou Public Transport Co., Ltd, Jinzhou 121001, China)
In view of the shortcomings of the current manual calibration feature point such as large errors, a method for automatic identificationof feature points is proposed. Firstly, the appropriate detection area is set for camera calibration during photogrammetry, and secondly, image preprocessing, image segmentation, and morphological filtering processing (image expansion, opening operation) are used to remove noise to identify vehicle tires, and the function bwtraceboundary is used to obtain the tire boundary, and then obtain the corresponding parameters according to the various formulas of the circle, and find the radius of the tire. At the same time, its center is marked to mark the tire center point, and then accurately identify the tire center feature point and its coordinates. The actual coordinates of the feature points are determined through the coordinate conversion relationship, and finally the speed estimation is carried out by using the traffic accident video speed identification standard, so as to achieve the purpose of improving the speed measurement accuracy. Experimental results show that the error of the estimation result is reduced by 3.07% by using this method to estimate the vehicle speed.
detection area calibration; characteristic point identification; vehicle speed estimation
10.15916/j.issn1674-3261.2022.06.002
U491.3
A
1674-3261(2022)06-0357-05
2022-03-19
赵丽丽(1995-),女,山西吕梁人,硕士生。
唐阳山(1972-),男,辽宁鞍山人,教授,博士。
责任编辑:刘亚兵
