基于逆向工程和3D打印的水泵叶轮快速重建方法
2022-02-22李卫民张凯璇刁家宇付松松
李卫民,张凯璇,刁家宇,付松松
基于逆向工程和3D打印的水泵叶轮快速重建方法
李卫民,张凯璇,刁家宇,付松松
(辽宁工业大学 机械工程与自动化学院,辽宁 锦州 121001)
以某电子水泵叶轮为例,基于逆向工程及3D打印技术,介绍水泵叶轮快速重建的全过程。介绍了由Handyscan 3D激光扫描仪和VXelements 3D数据采集软件组成的点云数据获取系统、描述了Ceomagic Studio逆向软件对点云数据处理的方法、CATIA软件对实体的三维数字化模型的重建过程等,最后获得符合精度要求的数据模型并通过FORTUS 360mc 3D打印机完成实物打印的过程。研究结果对其他种类的产品具有参考价值,逆向工程作为吸收先进技术的一种手段,可以基于原有产品进行分析和再创新,对于缩短新产品研发周期、提高设计水平具有重要意义。
逆向工程;Handyscan 3D激光扫描仪;3D打印;数据模型;快速重建
随着现代制造业的发展,逆向工程技术在制造业中的地位愈发重要起来。叶轮作为电子水泵的核心部件,在工作中易受水质、工作环境等各种因素影响而造成磨损,影响水泵的工作效率和使用寿命,进而造成工程或项目的停滞。而仅因叶轮损坏便重新购入整个水泵设备,不仅增加了企业的生产成本,而且延误了整个工程或项目的进展[1]。因本文提出了利用逆向工程和3D打印技术对水泵叶轮进行实物模型的快速重建方法,以最具效率的方式解决因设备损坏造成的项目停滞问题。
1 点云数据获取
作为逆向过程的第一步,点云数据的获取尤为关键,数据采集质量的高低直接决定了模型重建的效率和精度。本文就以目前市面上使用最广泛的Handyscan 3D激光扫描仪和VXelements 3D数据采集软件组成的点云数据获取系统对叶轮各部位、各曲面进行扫描,采集叶轮的轮廓数据。点云数据获取系统如图1所示。

图1 点云数据获取系统
1.1 准备工作
零件在扫描前需在表面均匀喷涂显像剂,以增强零件表面漫反射率,使得黑色、反射透明表面等物体的点云数据获取更加完整,以获得高质量的点云数据模型。但要注意显像剂喷涂不可过厚,均匀覆盖表面即可,以免造成尺寸误差。喷涂显像剂后的叶轮实物模型如图2所示。

图2 水泵叶轮实物图(着色后)
显像剂风干后,将零件放置于工作台上,利用工作台上的标记点对零件进行定位。在扫描时需要保持零件位置不变,不断旋转工作台以扫描零件各部位。
对于内部结构复杂的零件,无法通过扫描进行内部数据的获取,就需要对零件进行切割以便于测量,如线切割等。要注意的是,切割后的零件可能会产生误差和形变而影响测量数据。而对于尺寸较大的零件,可以对其表面张贴标记点,贴有标记点的零件,在扫描过程中可以对零件随意旋转和翻动,便于零件的整体扫描[2]。
这种基于标记点的点云数据拼接方法的主要过程原理如图3所示,图中黑点代表标记点。

图3 标记点数据拼接原理图
由此可知,点云数据间至少应存在4个共同的标记点,根据共同标记点确定位置关系进行数据间的拼接,拼接后的数据仍可以用于下次的数据拼接,以此确保点云数据的完整性[3]。
然后,根据零件的实际情况和精度要求对VXelements 3D软件进行参数设置。在面对不同扫描环境时,由于环境条件的改变,扫描仪参数的设置并非固定不变的,需要实时改变扫描仪参数以确保扫描精度,扫描仪配置中如图4所示。

图4 扫描仪参数设置
1.2 数据获取
扫描时,先对叶轮表面进行整体扫描,以获取点云数据模型的大体轮廓;其次针对叶轮上结构复杂部分以及内孔进行重点扫描,以保证数据的完整性;最后,用同样方法扫描零件反面,以便于后续点云数据的拼接。
在扫描过程中切忌某一部分点云数据扫描次数过多、时间过长,以免点云数据在此处大量堆积,造成尺寸误差,同时大量的点云数据也会降低计算机运行速度,影响后续工作效率[4],扫描成像图如图5所示。

图5 扫描仪扫描成像图(正面)
2 点云数据处理
将采集到的点云数据导入Ceomagic Studio逆向软件中进行点云数据的初步处理。在扫描过程中,受扫描仪精度、扫描环境、零件几何特征和人员操作经验的影响会产生大量的噪声点和无效数据,因此在模型重构前对点云数据进行处理[5]。
2.1 点云数据的精简
在保证数据完整度的前提下,对采集到的数量众多的点云数据进行精简,以此提升软件的运行速度,提高点云数据的处理效率。对点云数据的精简主要是进行滤波处理,滤波是将点云噪音进行删除,以得到精确平滑的数据的一种处理方法[5]。目前滤波一般分为高斯滤波、中值滤波、均值滤波。其中高斯滤波就是对整幅数据图像进行加权平均的过程,用加权平均后得到的来点表示邻域内的多个点,是一种线性平滑滤波[6],经分析后选择高斯滤波对数据进行处理,其处理原理如图6所示。点云数据个数精简至60%时,如图7所示。

图6 数据处理方法
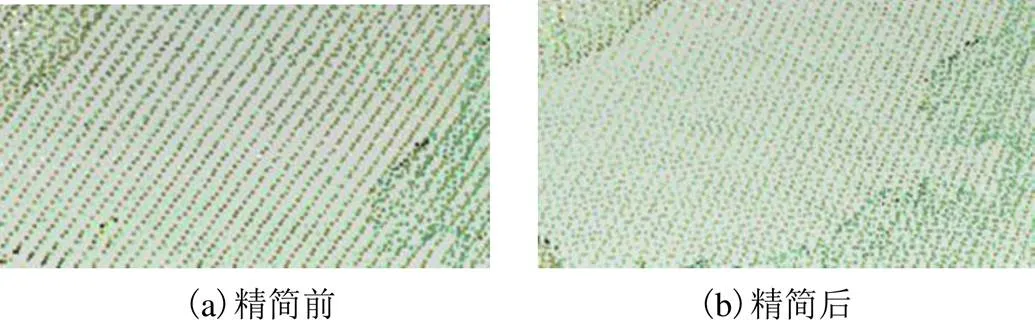
图7 点云数据精简前后对比图
2.2 点云数据的降噪和补缺
通过折角命令将与叶轮点云数据无关的数据(主要是工作台点云数据)进行删除,处理后的点云数据如图8所示。

图8 处理后的点云数据
对远离叶轮点云核心区域的无效的数据、非连接项进行圈选删除,旋转不同角度对不同视角上的偏离数据进行删除。也可以选定叶轮整体点云数据后再进行反选,以此删除空间中散布的大量无效噪声点。通过网格医生命令检测点云数据缺失处并自动修复,再将剩余的缺孔进行填充,使叶轮表面无缺口。若叶轮表面粗糙,可通过删除钉状物命令在保证不失真的前提下使叶轮表面变平滑。
2.3 点云数据的对齐
对扫描得到的叶轮正反面的点云数据进行对齐,主要采用Ceomagic Studio逆向软件中的手动注册和全局注册命令进行。在采用手动注册时,首先选择正反面点云数据有明显特征的公共点,完成点云数据的初始拼接,如图9所示。
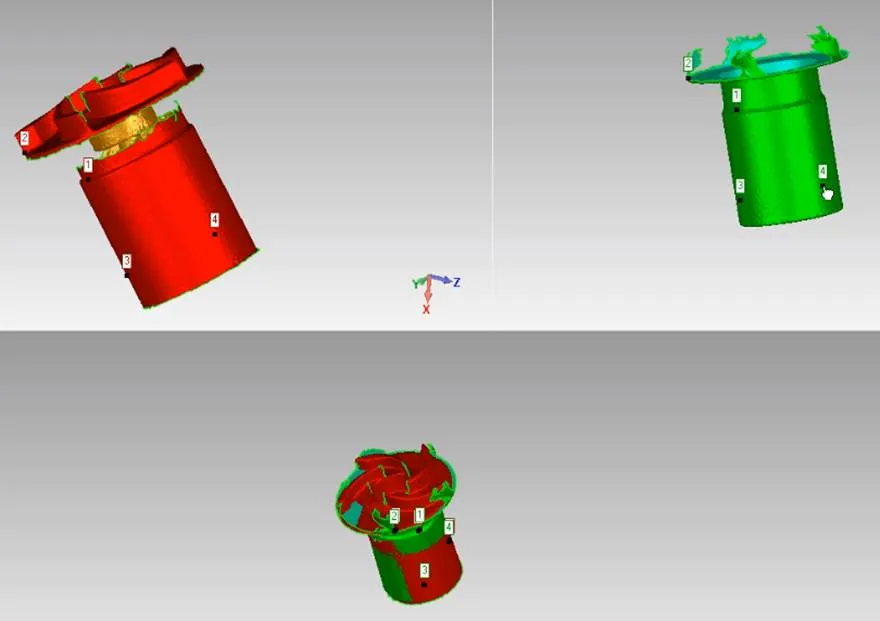
图9 点云数据的对齐
其次通过全局注册命令对初对齐完的点云数据进行精细拼接,直到正反面点数据达到达到最大迭代。最后对叶轮数据进行坐标系对齐,使点云数据与Ceomagic Studio软件坐标系重合,将叶轮底面与XZ平面创建对,叶轮回转轴线与Z轴创建对,目的是使叶轮点云数据以便于建模的方向和位置放置于空间中,便于后续在CATIA软件中进行模型重构。
3 模型重构
模型重构是逆向工程中非常重要的一部分,主要是将点云数据模型转化为数字化三维模型,并在此基础上完成工程分析和再创新设计。将在Ceomagic Studio软件中处理完成的点云数据导入CATIA中,应用零件设计模块、逆向点云编辑模块、创成式外形设计、快速曲面重建等模块完成三维数字模型重构[7]。在叶轮实体点云数据获取过程中,叶轮内孔部分因扫描不到导致点云数据缺失,这就要求我们手动去测量内孔的数据,即采用正逆向结合的方式完成模型重建的整个过程。
水泵叶轮除了叶片结构复杂之外,其它部分主要为圆柱状实体组成,因此在建模过程中,利用快速曲面重建模块中的曲线网格(Curve on Mesh)和二维平面(Planar Sections)命令获取Z轴上某一高度平面图,再利用扫描曲线(Curve from Scan)命令获取该平面的曲线轮廓,即可在CATIA测量该曲线的尺寸,如图 10所示。
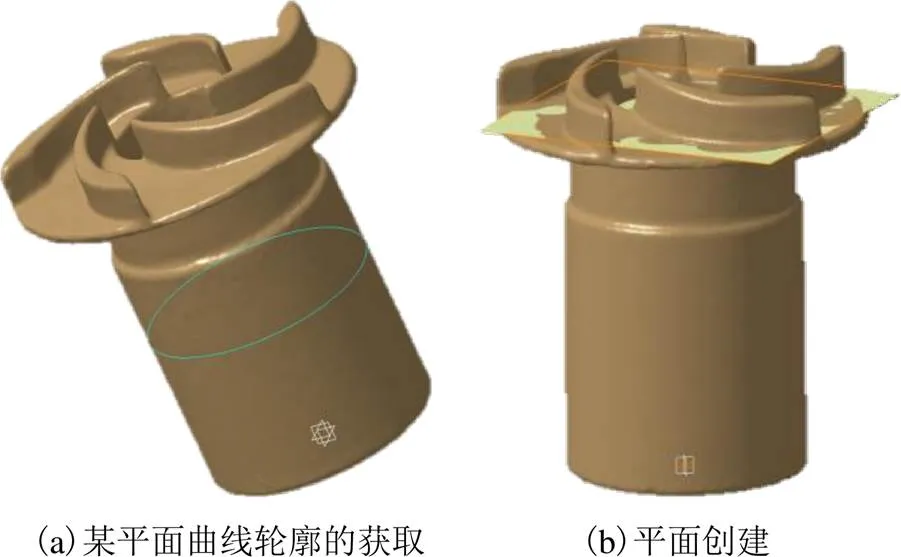
图10 模型重构
对于Z轴方向的高度,主要通过在快速曲面重建模块中建立两平面并对平面间的高度进行测量。通过上述这种方法,即可获得圆柱实体的尺寸数据,并通过零件设计模块中凸台命令生成圆柱体。
对于结构复杂的叶片部分,叶片数据测量不便,因此我们选择正逆向结合的方式进行模型的重建。首先在快速曲面重建模块中按上文所述方法获取Z轴方向某一平面叶片的轮廓曲线,并通过创成式外形设计模块中投影命令将其投影到叶片所在平面。由于叶片部分呈螺旋上升结构,无法通过一次凸台命令完成构建,可先通过凸台命令将叶片轮廓曲线按Z轴方向拉伸到最大高度,其次在草图中绘制叶片在X轴或Y轴方向的轮廓曲线、叶片上升弧度曲线,并对多余部分通过凹槽命令进行切除,最后通过阵列命令生成其余4个叶片模型。再对叶轮在完成叶片的重建后,可以观察生成的三维数字模型与点云数据模型的相间程度来确定模型重建的精度,相间频率越大则说明贴合度较高,误差较小。在整个模型重建的过程,需要不断观察三维数字模型与点云数据间的相间程度,对误差较大部分及时进行数据修改,以确保精度要求,叶片重构如图11所示。
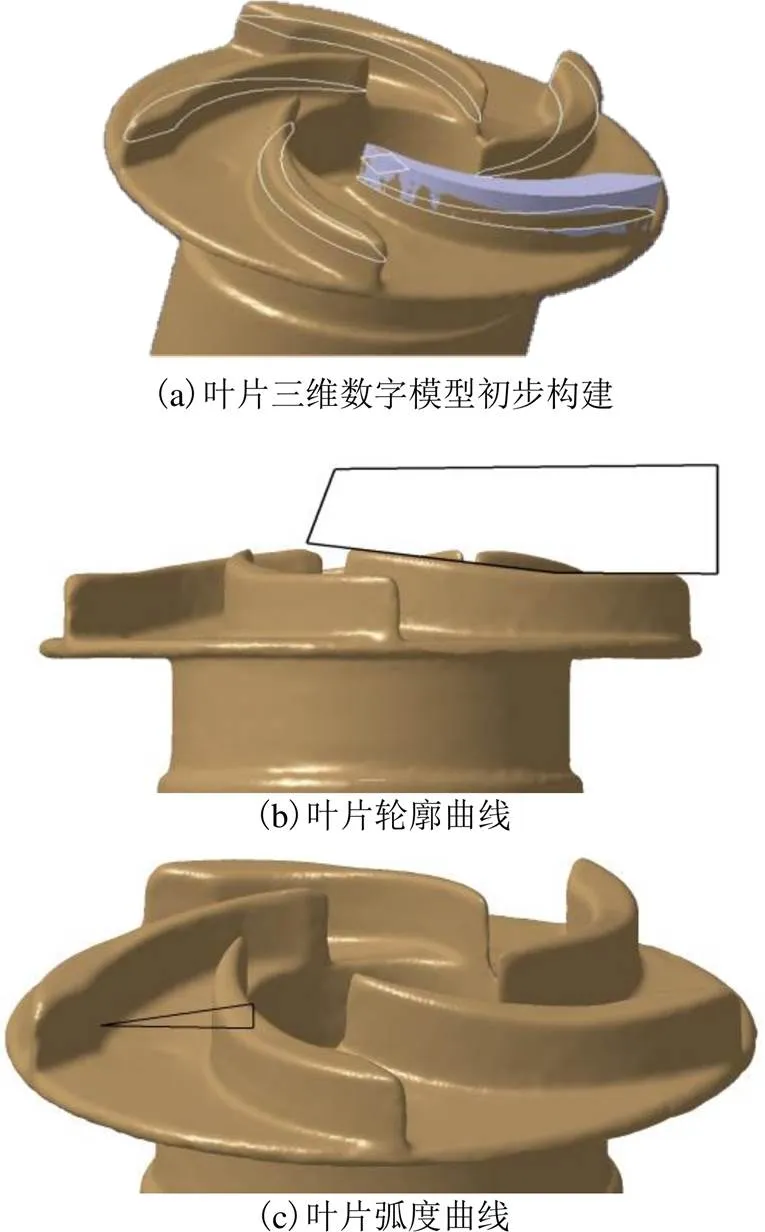
图11 叶片三维数字模型重构图
在进行逆向重建的过程中,要充分研究CATIA中各个模块、各个命令的作用,不能仅局限于几个命令就完成三维数字模型的构建,否则很难保证模型精度和效率。另外在建模过程中,需要使用各个模块中的大量指令,为了节省时间、提高效率,可以将使用频率最多的模块设为主要重建模块,并在此模块中建立工作台,将其他模块中所用到的指令添加到主模块工作台中,大大减少了切换设计模块和寻找命令的时间。
如图12为模型重建后的叶轮三维数字模型与点云数据模型对比图。
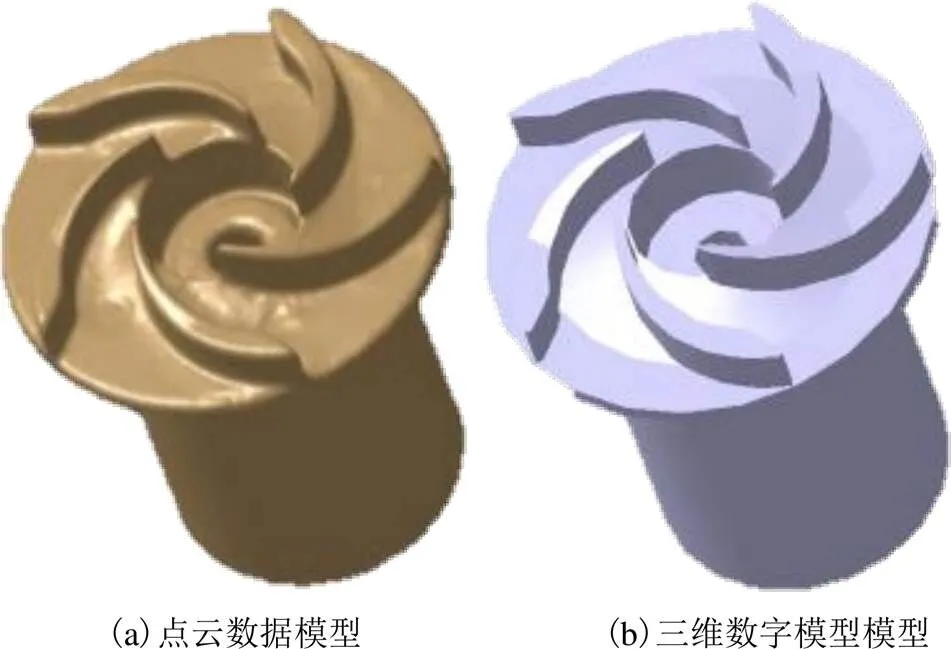
图12 重构模型与点云数据模型对比图
4 误差分析
完成三维数字模型的重建后,通过提取命令将叶轮表面提取出来,再通过偏差分析(Deviation Analysis)命令将叶轮表面与点云数据模型之间进行误差分析,其原理是检测叶轮表面与点云数据间的间距数值以获取各个点的偏离程度,观察检测结果的数值是否在要求的公差带范围内。叶轮的误差分析如图13所示,其误差在±0.6 mm之内,存在一定的尺寸误差。

图13 误差分析图
误差产生的主要原因是叶轮内孔点云数据扫描不完整造成的,如图14中箭头所指处。
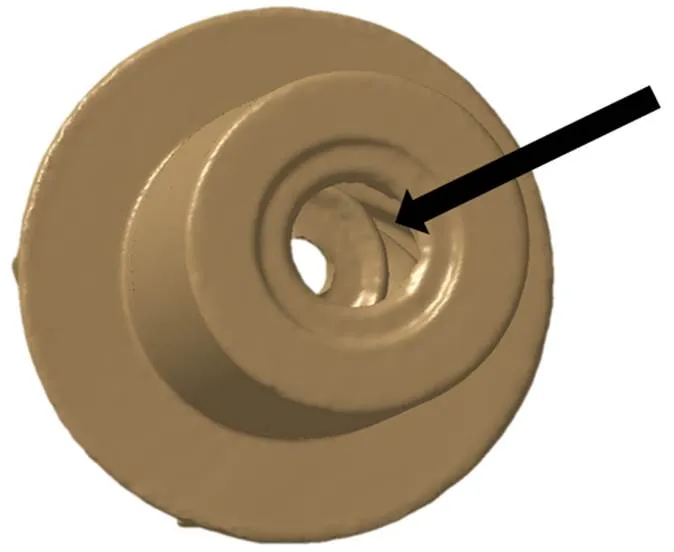
图14 内孔点云数据缺失图
在数字化模型重构过程中需要手动测量内孔数据,而在进行误差分析时,是将提取到的不完整的点云数据模型与重建后的完整的三维数字模型进行误差对比,因此,在内孔部分产生尺寸误差是不可避免的。另一方面,扫描前显像剂喷涂不均,测量系统、测量环境引起的系统误差,扫面仪的精度、扫描时的光线影响都是产生误差的次要原因[8]。其次,在进行点云数据处理的时候,零件各点云数据的对齐和点云数据与坐标系的对齐过程中可能会因为选点不准确而造成误差。
为了减少误差,要针对误差产生的根本原因进行处理[9]:
(1)喷涂显像剂时,保持最佳喷涂距离,避免显像剂液体在零件的表面堆积,尤其是狭窄缝隙中堆积;
(2)扫描过程中,保证扫描环境光线充足,对深孔等内部结构扫描时,可以利用手持灯管增强光线条件再进行扫描;
(3)对叶轮正反面点云数据对齐时,难以在圆柱体表面找到相同位置特征点,可以在喷涂完显像剂的零件表面进行标记以便于选择点云数据对齐时的特征点。
5 打印过程
在完成逆向建模并符合精度要求以后,才可以进行实体模型的3D 打印。为了方便研究,本文使用ABS-M30塑料材料代替制造水泵叶轮所需的原材料,并通过FORTUS 360mc 3D打印机完成打印过程。在进行打印之前,需要对打印方式进行选择,主要是对支撑材料的支撑方式和打印位置进行选择。支撑方式主要分为五种:
Smart方式 使用尽可能少的支撑材料,支撑面积稍比模型件小些,支撑材料倾斜增长,使用的支撑材料最少。这种方法不适合重心较高的模型,易在打印过程中出现模型倒塌的现象。
Sparse方式 应用这种模式生成的支撑体的面积更大一些,大致与模型件等大,支撑体垂直增长。
Basic方式 支撑面积不仅与模型的投影面积等大,同时支撑体内部形成的打印刀路更加紧密。
Surround方式 应用这种方式支撑体内部刀路不仅线条紧密且比待打印模型的投影面积还要更大一些,支撑范围大于待打印模型件大小。
Box方式 软件自动计算层厚,在支撑材料中间,每隔一定高度打印一层模型材料,支撑体最终可通过分块的方式拆除。
由于叶轮结构重心低,自身可平稳放置于平面上,对支撑材料的要求不大,因此选择Smart方式,尽量避免支撑材料的使用,减少打印时长。图15所示为不同支撑方式下支撑材料的形状。
待打印结束后,将零件从打印机中取出,并放入温度为70℃的碱性溶液中超声波处理后,即可消除支撑材料,得到完整零件模型。图16所示为打印模型与实物模型(着色后)对比图。

图16 打印模型(左)与实物模型(右)
6 结论
针对因水泵叶轮损坏而导致的工程停滞问题,提出利用逆向工程和3D打印技术进行叶轮实物的快速重建方法。
通过扫描仪对点云数据进行收集,使用逆向软件进行点云数据的处理和三维数字化模型的重建,最终通过3D打印机获得了符合精度要求的重建实物模型,以高效率、低费用的方法切实解决了工程的当务之急,同时也证明了此方法的有效性。另一方面,针对逆向过程中所遇到的问题,提出了具有参考价值的解决方法。
[1] 陈冬武. 逆向工程和激光技术在叶轮修复中的应用[D].兰州: 兰州理工大学, 2018.
[2] 李卫民, 赵文川, 马平平. 基于Handyscan 3D激光扫描仪的逆向技术研究[J]. 机床与液压, 2018, 46(7): 72-77.
[3] 欧阳祥波, 宗志坚, 熊会元. 基于标志点的测量数据自动拼接方法[J]. 中国图象图形学报, 2008(2): 298-301.
[4] 白瑀, 张浩, 黄亮, 等. 整体叶轮的逆向数据采集和模型重建[J]. 特种铸造及有色合金, 2019, 39(3): 293-297.
[5] 陈艳雷. 基于逆向工程的扫描点云数据预处理技术研究[D]. 郑州: 河南工业大学, 2018.
[6] 李刘轶, 朱煜峰. 基于混合滤波的点云数据降噪算法研究[J]. 江西科学, 2021, 39(3): 525-529, 533.
[7] 阳波, 王奋刚, 赖丽珍, 等. 基于CATIA软件的曲面重构技术研究[J]. 机械设计与制造工程, 2017, 46(2): 51-54.
[8] Fabian Bauer, Michael Schrapp, Janos Szijarto. Accuracy analysis of a piece-to-piece reverse engineering workflow for a turbine foil based on multi-modal computed tomography and additive manufacturing[J]. Precision Engineering, 2019, 60(C).
[9] 吴阳, 冯兰芳, 郑金锋, 等. 逆向工程中影响扫描点云精度的因素分析及解决方法[J]. 制造业自动化, 2017, 39(2): 40-43.
Rapid Reconstruction of Pump Impeller Based on Reverse Engineering and 3D Printing
LI Wei-min, ZHANG Kai-xuan, DIAO Jia-yu, FU Song-song
(College of Mechanical Engineering and Automation, Liaoning University of Technology, Jinzhou 121001, China)
Taking an electronic pump impeller as an example, this paper introduces the whole process of rapid reconstruction of the pump impeller based on reverse engineering and 3D printing technology. This paper introduces the point cloud data acquisition system composed of Handyscan 3D laser scanner and VXelements 3D data acquisition software, describes the method of point cloud data processing by Ceomagic Studio reverse software, and the reconstruction process of entity 3D digital model by CATIA software, etc. Finally, the data model that meets the precision requirements is obtained and the process of physical printing is completed by 3D printer. The research results have reference value for other kinds of products. As a means of absorbing advanced technology, reverse engineering can analyze and re-innovate the original products, which is of great significance for shortening the research and development cycle of new products and improving the design level.
reverse engineering;handyscan 3D laser scanner;3D printing;data model;rapid reconstruction
10.15916/j.issn1674-3261.2022.06.001
TP391
A
1674-3261(2022)06-0351-06
2021-10-09
2020年辽宁省教育厅科学研究经费项目(202015401)
李卫民(1965-),男,辽宁朝阳人,教授,博士。
责任编辑:陈 明
