开孔定向仪中陀螺随机漂移误差处理与分析
2022-02-22燕斌
燕 斌
(中煤科工集团西安研究院有限公司,陕西 西安 710077)
瓦斯抽放是煤矿井下瓦斯治理最有效的方法,通常利用钻机在岩巷中打穿层钻孔和煤巷中打顺层钻孔以实现瓦斯抽放。按照预定设计的轨迹实现瓦斯抽放,一方面需要重点解决钻进过程中的轨迹测量和控制的问题,另一方面需要解决钻机开孔定位精度、钻机开孔定向装置问题[1-2]。陀螺惯性传感器由于不受铁磁性环境的影响特点,因而被广泛应用于惯性导航、石油测井技术、煤田地质勘探和自动驾驶等领域。陀螺传感器的类型较多,且具有各自特点[3]。光纤陀螺传感器具有精度较高、体积较大、价格较高等特点,而微机电(MEMS,Micro-Electro-Mechanical System)陀螺具有体积较小、成本较低、但精度较低等特点[4]。
为了获得较高的钻机开孔测量精度,必须对装置中的陀螺传感器进行误差补偿及修正。确定性误差及随机漂移性误差是陀螺仪中最主要的2种误差[5]。一般情况下,陀螺传感器的确定性误差主要包括零偏、灵敏度、坐标轴不正交及安装不重合,通常可以建立确定性误差模型,通过标定方法进行消除。而随机漂移性误差长时间工作过程中会随时间发生变化,对钻机开孔定位精度也会产生影响,必须对系统中陀螺惯性传感器中的随机漂移误差进行分析与补偿,常用的方法为时间序列分析方法。
时间序列是按照时间顺序获取的一系列观测值,序列观测值之间具有相互依赖性和随机性特点[6]。时间序列分析方法就是从时序领域分析数据中存在的规律,对其建模研究,预测走势或实施控制。本文针对一种集成光纤陀螺传感器和MEMS陀螺传感器的钻机开孔定向仪中的2种惯性器件采集的数据进行时间序列分析,建立了随机漂移误差模型,最后采用卡尔曼滤波方式进行最优估计,可以有效降低陀螺信号随机漂移,提高钻机开孔的精度。
1 工作原理
本文中煤矿井下钻机开孔定向仪系统主要包括基于单轴光纤陀螺寻北系统和基于MEMS陀螺的捷联惯导系统2个重要组成部分。①寻北系统的主要工作原理:系统保持静止状态下,在微处理器的控制下旋转至多个位置,并在每个位置采集单轴光纤陀螺的数据,待完成全部位置采集时,解算出与地理真北方向的方位角。②捷联惯导系统主要工作原理:将系统置于钻机导轨上,在运动过程中,系统将此方位角作为初始值,结合MEMS陀螺实时采集的数据进行捷联惯导解算,得出开孔定向仪的实时姿态角度。当静止于钻机导轨上,由于导轨与钻杆平行,此时开孔定向仪显示的角度就是钻机开孔的姿态角度的信息。
本文选用F70L-M型单轴中高精度闭环光纤陀螺和ADIS16475 MEMS惯性测量单元,其陀螺主要性能指标见表1。

表1 2种陀螺传感器主要性能指标Tab.1 Main performance indicators of two types gyroscope sensor
2 随机误差处理
从工作原理可以看出,寻北系统中的光纤陀螺和捷联惯导中的MEMS惯性测量单元的陀螺精度共同决定系统的精度,必须进行误差修正。相比较常值漂移误差,随机漂移误差的修正更为复杂。随机漂移误差处理流程如图1所示。主要包括2部分:数据预处理和模式识别及建立。数据预处理主要包括平稳性检验、周期性检验及正态检验;模式识别及建立主要包括模型的识别与估计、实用性检验和模型确定。
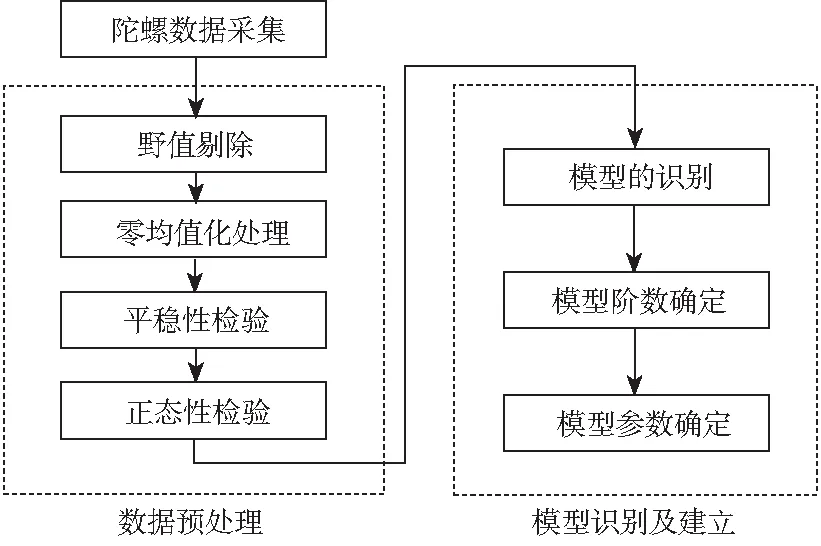
图1 随机漂移误差处理流程Fig.1 Random drift error processing flow
2.1 数据预处理
2.1.1 野值剔除
本文采用工程上广泛应用的莱依达准则,将超过3倍的标准偏差的误差从测量数据中剔除,具体步骤如下。
陀螺数据采集的量测值ω1,ω2,…,ωN平均值如下:
(1)
陀螺数据采集的量测值与平均值差值如下:
(2)
式中,i=1,2,…,N。
陀螺数据序列的标准差:
(3)
对采集的陀螺数据进行数据判别,当|ωi|>3δ,则认为该测量的陀螺数据为野值,应剔除。
2.1.2 零均值处理
在静态数据采集过程中,固定分量和随机分量是光纤陀螺和MEMS陀螺原始漂移信号中的主要组成。为满足2种陀螺的时间序列建模要求,就必须对陀螺的数据零均值进行处理,除去信号中的固定分量[7],其主要表达式如下:
z(t)=y(t)-μ0
(4)
式中,y(t)为陀螺采集数据的原序列;μ0为陀螺序列均值;z(t)为陀螺采集数据零均值处理后的序列。
2.1.3 趋势项处理
经过零均值处理后,系统中光纤陀螺和MEMS陀螺采集的信号中还可能包含缓慢变化的趋势项,可通过建模予以剔除[8]。陀螺采集的数据的趋势项可以用多项式的函数d(t)近似表示:
d(t)=a0+a1t1/2+a2t+a3t2+a4t-1/2+a5t-1+a6t-2
(5)
式中,ai(i=1,2,3,4,5,6)为模型系数;t为时间。
为求解趋势项的模型系数,本文采用最小二乘法,使得函数和离散数据的误差平方和最小。剔除趋势项后得到新的序列:
Z′(t)=Z(t)-d(t)
(6)
2.1.4 平稳性检验
经过上述处理后,陀螺随机漂移数据的序列还要经过平稳性检验,以判断陀螺数据是否随时间变化,只有经过平稳性检验,陀螺数据才具有统计的意义。平稳性检验的方法较多,包括逆序法检验法、特征根检验法、游程检验法等,本文中采用工程中常见的逆序法检验序列平稳性[9],其主要思路是:
(1)将原有陀螺采集的N个数据序列{Z(t)}分为M段,求其每段的平均值。
(2)计算出均值序列中逆序总数S。
(3)逆序总数S的期望值为:
(7)
方差为:
(8)
(4)统计量λ为:
(9)
λ服从标准正态分布,即λ~N(0,1)。当λ<2且显著性水平为0.05时,陀螺数据序列{Z(t)}为平稳性序列;反之,{Z(t)}为非平稳性序列。
2.1.5 正态性检验
时间序列分析必须满足正态分布的统计特性,检验正态分布的方法较多,包括概率值检验、χ2拟合优度检验、W检验与D检验以及峰度检验和偏度检验。本文采用检验序列峰度检验和偏度检验,利用偏态系数ξ(三阶距)和峰态系数υ(四阶距)来进行判断。当偏态系数ξ≈0和峰态系数υ≈3,则满足正态分布的统计特性。偏态系数和峰态系数近似值分别用式(10)和式(11)表示:
(10)
(11)

2.2 误差模型建立
2.2.1 模型的建立和阶次确定
自回归模型(AR)、滑动平均模型(MA)和自回归滑动平均模型(ARMA)是时间序列中最重要的3种模型[10]。根据各个时间序列模型的特点,应用平稳时间序列的自相关函数和偏自相关函数的性质,识别平稳时间序列的模型。
平稳时间系列{Z(t)}的自协方差函数为:
(12)

偏相关系数的递推公式为:
(13)
通过采集F70L-M型光纤陀螺和ADIS16475型MEMS陀螺的数据,计算各自的自相关系数和偏相关系数,如图2和图3所示。从图2和图3可以看出,2种陀螺的自相关系数和偏相关系数均表现为“拖尾”,故判定模型为ARMA(p,q)模型。

图2 F70L-M型光纤陀螺的自相关系数与偏相关系数Fig.2 F70l-M fiber-optic gyroscope′s autocorrelation coefficient and partial correlation coefficient
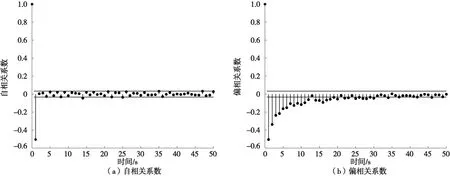
图3 ADIS16475型MEMS陀螺的自相关系数与偏相关系数Fig.3 ADIS16475 MEMS gyroscope′s autocorrelation coefficient and partial correlation coefficient
2.2.2 模型参数确定
为其确定模型的阶数p、q的值,目前常采用的方法是FPE准则、AIC准则和BIC准则[11]。本文中采用AIC准则对模型定阶,AIC函数的定义为:
(14)

依次按照低阶到高阶建立不同模型,并计算各模型的AIC值,当AIC值最小时,其对应的p、q值为模型的阶次。
根据判断条件可知,ARMA(2,1)的AIC值最小,故选择建立ARMA(2,1)时间序列模型:
xk=φ1xk-1+φ2xk-2+ak-θ1ak-1
(15)
采用最小二乘法原理进行参数估计,可以得到如下方程:
xk=1.234xk-1+3.45xk-2+ak-1.023ak-1
(16)
3 卡尔曼滤波处理
3.1 卡尔曼滤波
卡尔曼(Kalman)滤波是一种线性、无偏、以误差方差最小为估计准则的最优估计算法。在对随机误差建模后,通过卡尔曼滤波进行最优估计,可以有效降低陀螺信号随机漂移。根据陀螺静态输出模型可以得到卡尔曼滤波的状态变量(17)和观测方程(21):
X(k)=AX(k-1)+BW(k)
(17)
式中,X(k)为系统状态;W(k)为过程噪声、高斯白噪声;A、B为系统参数。其中系统状态为:
X(k)=[Y(k),Y(K-1)]T
(18)
系统噪声为:
W(k)=[a(k)-a(k-1)]T
(19)
根据本文中光纤陀螺随机误差建立ARMA(2,1)模型可知:
(20)
系统观测方程为:
Z(k)=HX(k-1)+V(k)
(21)
式中,Z(k)为时刻的量测值;H为量测系统的参数;V(k)为量测噪声、高斯白噪声。
联立状态方程和量测方程,运用卡尔曼滤波递推计算:
(22)

3.2 数据处理结果分析
3.2.1 F70L-M型光纤陀螺数据处理
卡尔曼滤波处理前后的数据如图4所示,卡尔曼滤波处理前后的Allan方差如图5所示。
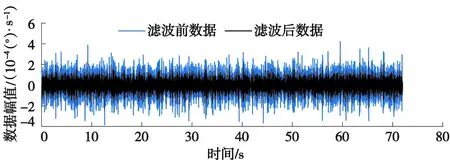
图4 卡尔曼滤波处理前后F70L-M型光纤陀螺数据Fig.4 F70L-M fiber-optic gyroscope′s data before and after Kalman filter process
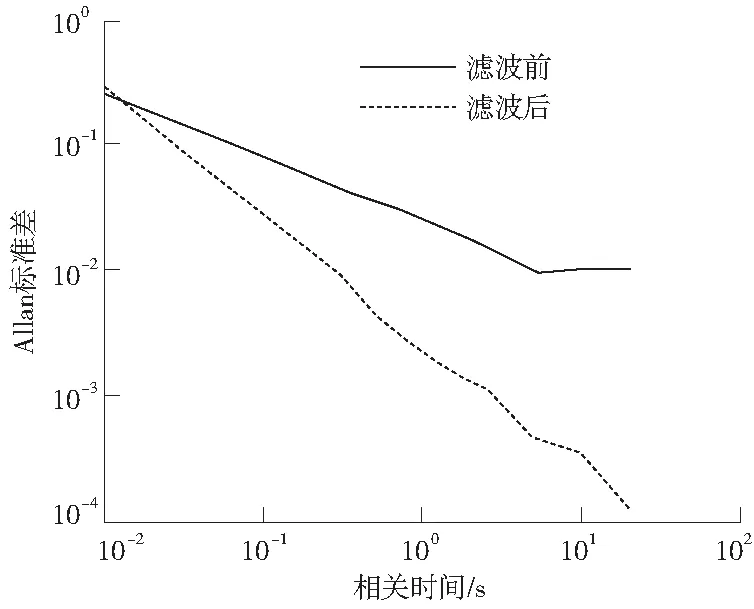
图5 卡尔曼滤波处理前后F70L-M型光纤陀螺Allan方差Fig.5 F70L-M fiber-optic gyroscope′s Allan variance before and after Kalman filter process
从图5中可以看出,滤波后光纤陀螺的Allan标准差曲线相比较于滤波前,有了较大幅度的下降,说明卡尔曼滤波提升了数据的稳定性。滤波前后随机漂移的各项误差系数见表2。从表2中数据可以看出,卡尔曼滤波器能有效的减少光纤陀螺的随机漂移,提高测量精度,证明了建立的 ARMA模型的有效性。
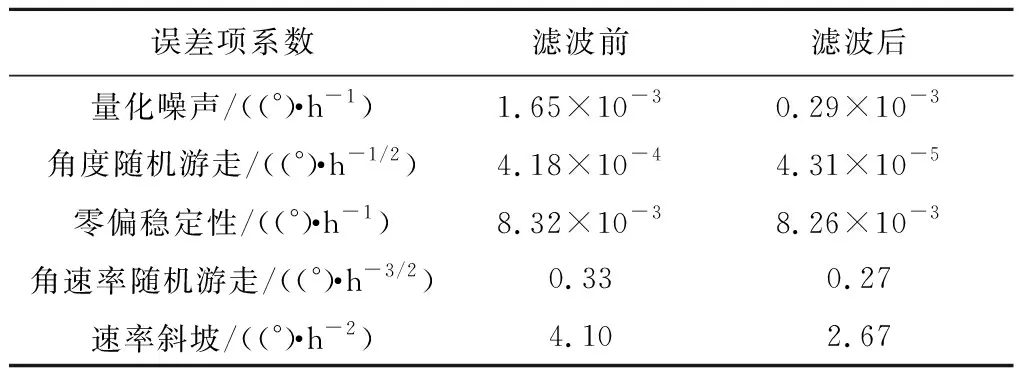
表2 卡尔曼滤波前后F70L-M型光纤陀螺误差项系数Tab.2 F70L-M fiber-optic gyroscope′s error term coefficients before and after Kalman filter process
3.2.2 ADIS16475型MEMS陀螺数据处理
卡尔曼滤波处理前后的数据如图6所示,卡尔曼滤波处理前后的Allan方差如图7所示。
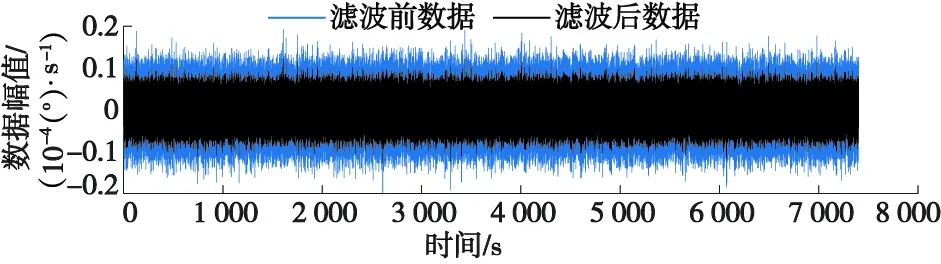
图6 卡尔曼滤波处理前后ADIS16475型MEMS陀螺数据Fig.6 ADIS16475 MEMS gyroscope′s data before and after Kalman filter process
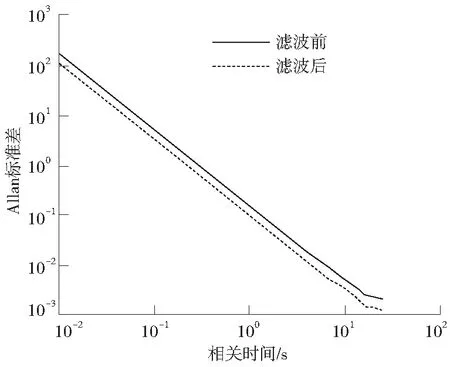
图7 卡尔曼滤波处理前后ADIS16475型MEMS陀螺Allan方差Fig.7 ADIS16475 MEMS gyroscope′s Allan variance before and after Kalman filter process
从图7中可以看出,滤波后光纤陀螺的Allan标准差曲线相比较于滤波前,有了较大幅度的下降,说明卡尔曼滤波提升了数据的稳定性。滤波前后随机漂移的各项误差系数见表3。
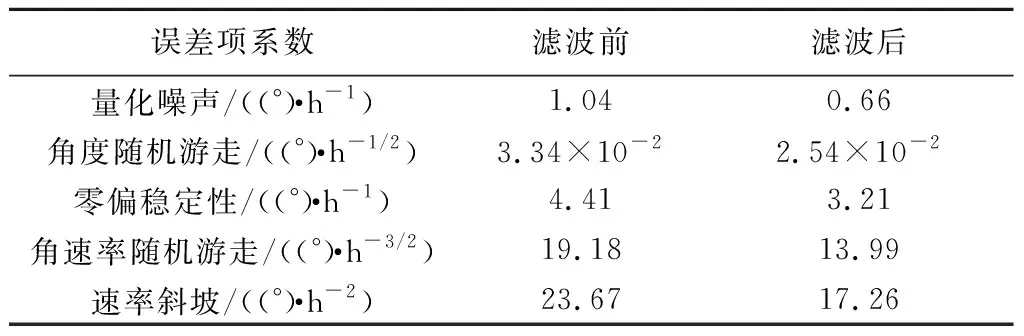
表3 卡尔曼滤波前后ADIS16475型MEMS陀螺误差项系数Tab.3 ADIS16475 MEMS gyroscope′s error term coefficients before and after Kalman filter process
从表3中可以看出,卡尔曼滤波器能有效地减少光纤陀螺的随机漂移,提高测量精度,证明了建立的 ARMA模型的有效性。
4 结论
(1)本文提出一种基于单轴高精度光纤陀螺集成MEMS微机电陀螺的新型钻机开孔定向仪,发挥了单轴光纤陀螺高精度和MEMS微机电陀螺低成本的特点,能够满足实际的工程的需要。
(2)针对系统中光纤陀螺和MEMS陀螺建立了随机漂移误差的流程,并详细叙述了陀螺数据预处理的过程,运用时间序列分析法建立了ARMA随机误差模型,并确定了模型的参数。
(3)针对建立的随机误差模型,采用卡尔曼滤波算法对光纤陀螺和MEMS陀螺信号进行滤波处理,采用Allan方差分析方法对滤波后的陀螺数据进行分析。分析结果表明,光纤陀螺和MEMS陀螺的随机漂移误差明显减小,精度得到有效提高。
