基于智能导向的城市交通空间规划系统设计*
2022-02-22侯硕郁枫王倚天
侯硕,郁枫,王倚天
(中国建筑科学研究院有限公司,北京100013)
1 引言
城市是人类生存的主要栖息地,已经成为一个综合性的生存系统,包括自然环境、社会变迁以及经济变化,是人类物质财富和精神财富的中心,同时也成为了人类文明的基础象征[1]。城市交通空间规划在为居民提供便利的同时,也会存在很多弊端,城市交通空间规划不仅会影响城市交通布局,还会影响居民的出行效率。国外针对城市交通空间规划的研究比较先进,法国在2011年的时候就开始实施城市交通空间规划,后来德国在2016年也展开了城市交通空间规划研究,2017年时,美国对300个专用路线进行了交通空间规划,大大提高了居民的出行效率[2];国内随着城市交通问题的不断凸显,在2016年时上海政府就开始开展城市交通空间的规划研究,为城市交通提供了政策支持,同时也减少了车辆的能耗,解决了生态环境恶化的问题[3]。
文献[4]从内涵定义、指标分析、模型构建等角度,提出基于交通通行和生活空间二维功能的街道规划和设计方法,对传统以车行为导向的街道规划理论进行了有益的拓展;文献[5]以韩城市为例,在总结慢行交通系统现状的基础上,通过对步行道和自行车道的分级组合,提出合理的横断面宽度要求,从而优化城市道路空间,从规划层面保障慢行交通路权,并将其应用到公交线网的分层规划中,为城市公交线网的分层规划提供了有利依据。
基于以上背景,本文将智能导向应用到了城市交通空间规划系统设计中,从而提高了城市交通空间规划效果。
2 城市交通空间规划系统硬件设计
2.1 数据采集模块
在城市交通空间规划系统的数据采集模块中,采用飞利浦系列控制器[6]作为数据采集模块的主控芯片,使该模块与上位机之间相互构成了多条链路的数据采集和处理。控制器采用通用的32 位微型处理器,在应用过程中具有较高的控制性能,且消耗的功率也比较低。
数据采集模块的多路电压信号是通过A/D信号经过转换之后,到控制器中再进行传输,从而实现数据的处理,本文设计采用TLC736MCB2为数据采集模块的开关电容逐次接近的转换器[7]。数据采集模块的转换器需要具备三个控制输入端以及模拟输入通道,采用串行接口便于该模块与微型计算机进行连接。数据采集模块的硬件结构如图1所示。
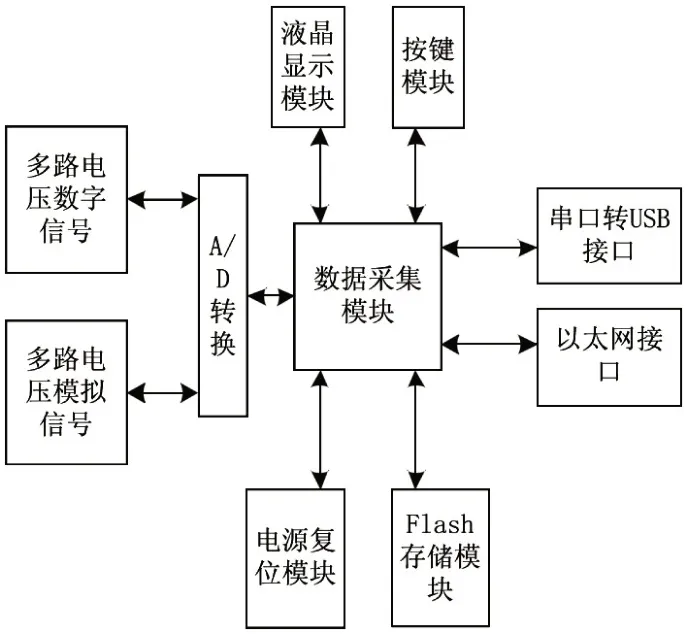
图1 数据采集模块的硬件结构
在数据采集模块中,利用BM32-98DF 芯片将模块中的串口转换成USB 接口,BM32-98DF 芯片内部包括振荡器、USB收发器以及全速功能控制器,在使用时不需要与外部其他元器件进行相互连接,只要满足USB 规范就可以提高串口数据的传输速率,还能使数据采集模块的工作效率得以提高。数据采集信号经过转换之后,通过转换器使获取到的数据到达上位机再发送。
2.2 Web服务器设计
WEB 服务器一般都是应用在硬件端口受到限制的系统中,通过浏览器使用图形界面来访问城市交通空间规划系统。WEB服务器的设计是基于因特网络,用户端在任意地方都可以访问WEB服务器来查询各种信息,为城市交通空间规划系统的维护和管理带来便利。
传统的WEB服务器是以用户端口为中心,由多个计算机组成,主要用于响应用户端口的服务请求[8]。在城市交通空间规划系统中,由于城市交通空间资源非常有限,传统WEB 服务器不能对资源占用量大的程序提供缓冲支持,因此就需要设计一种新型WEB 服务器,其体系结构如图2所示。
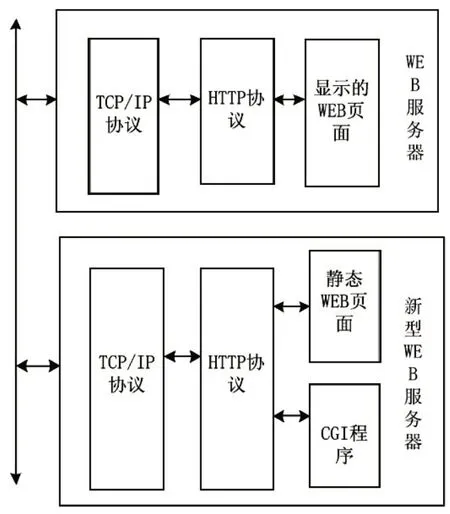
图2 WEB服务器的体系结构图
WEB 服务器向城市交通空间规划系统发送连接请求时,通过TCP/IP协议审核并经由因特网,最后将连接请求发送到WEB服务器,当WEB服务器检查通过之后,就会与浏览器端建立TCP/IP连接。连接建立完成之后,浏览器就会开始向城市交通空间规划系统发送HTTP请求,并将请求发送到WEB 服务器端。当WEB 服务器接收到HTTP 请求后,就会根据HTTP 协议规范对请求进行解析,并判断请求的内容是动态CGI 程序还是静态网页,最后返回给浏览器不同的结果。当WEB浏览器接收到WEB服务器返回的数据之后,就会将网页的具体内容显示在屏幕上。
2.3 MapObject组件设计
MapObject 组件是一个以COM 技术为基础的地图应用组件,由45 个自动化对象和OCX 组成,在标准的编程环境下,可以与WEB服务器和数据采集模块组成一个完全独立的应用软件。MapObject 组件是计算机产品中最简洁的一种GIS组件,它以接口数量少的特性为城市交通空间规划系统提供了GIS功能,同时还具有结构合理、容易扩展的优势。与MapObject组件相比,其他的GIS组件,会由于提供的功能较多,而破坏了组件的结构美,从而影响用户在扩展上的灵活性。
从MapObject组件对城市交通空间规划数据的组织方式来看,具有清晰的概念且便于更多人理解。MapObject组件认为一个城市交通地图是由多个图层共同构成的,每一个图层的数据来源非常广泛,不仅可以作为CAD图层,还可以作为GIS矢量图层,甚至还可以作为影像数据。对于前两个图层来讲,图层的内部都用Recordest来表达,这样就将不同格式的城市交通空间规划数据在内存中的表达抹平了,同时还简化了程序员对城市交通空间规划数据的观点。
从MapObject组件为城市交通空间规划系统提供的功能接口来看,在城市交通空间规划系统的所有程序上都可以实现,主要体现在以下几个方面:
(1)统计城市交通空间
(2)城市交通空间地图的缩放和漫游
(3)创建新的城市交通空间规划文件
(4)显示城市交通空间遥感影像
(5)匹配城市交通空间地址
通过调用上述程序接口,可以在城市交通空间规划系统中开发出比较简单的城市交通地图应用,甚至更加复杂的3S应用。利用城市交通空间分析算子,构造出一个具有复杂度的城市交通空间分析模型。由于MapObject 组件为城市交通空间规划系统提供了数据的更新接口,用户在访问系统时就可以扩展出登录系统的编辑工具。
在MapObject 组件设计中,对以往的MapObject 组件中增加以下几个功能:
(1)光滑处理城市交通空间影像的图层
(2)在MapObject组件运行过程中随时打包功能
(3)适当增加规划标签的整理功能
(4)改进城市交通空间规划的投影引擎
(5)增加Bug 修补功能,改进城市交通空间规划系统性能
(6)提高MapObject组件装载数据集的性能
在城市交通空间规划系统的硬件设计中,采用飞利浦系列控制器作为数据采集模块的主控芯片,设计了数据采集模块的硬件结构,在传统WEB 服务器的基础上,设计了WEB 服务器的体系结构,根据WEB 服务器的运行原理,完成WEB 服务器的设计,结合MapObject 组件设计,实现了系统的硬件设计,从而提高了城市交通空间规划效率。
3 城市交通空间规划系统软件设计
3.1 预测城市交通空间分布格局变化
在城市交通空间规划方面,预测城市交通空间分布格局的变化可以反映出城市交通空间的结构特性,依据城市交通空间设计、交通意向、行为活动等相关理论,对城市交通空间分布格局的变化情况进行预测。城市交通空间的智能导向所针对的目标用户是城市交通空间内的所有群体,而并不是针对特定的人群进行智能导向的,将智能导向的通用性设计应用到城市交通空间分布格局变化的预测中,就是将所有用户都看成是不同程度的智障患者,以用户为核心,不需要进行复杂的操作就可以预测出城市交通空间分布格局的变化。
预测城市交通空间分布格局的变化主要从城市交通空间斑块的凝聚度、交通空间散布与并列指数、交通空间斑块占城市面积的比例几个指数来进行,具体预测方法如下:
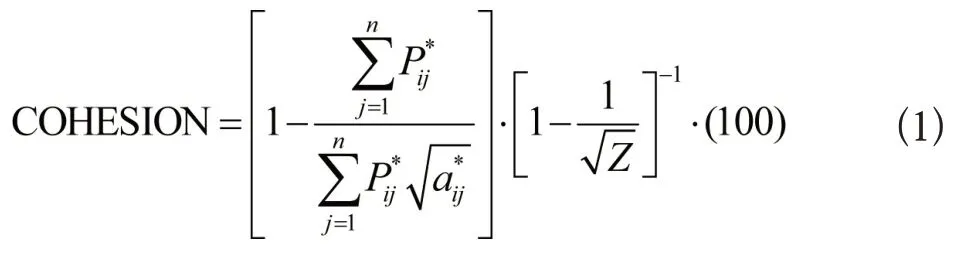
(1)城市交通空间斑块的凝聚度
城市交通空间斑块的凝聚度COHESION 的表达式如下:
(2)交通空间散布与并列指数
交通空间散布与并列指数的表达式为:
公式中,m表示城市交通类型数量,eik表示城市交通i与k的相邻边长度。交通空间散布与并列指数可以反映出不同的城市交通类型之间的总体散布与并列情况。
(3)交通空间斑块占城市面积的比例
交通空间斑块占城市面积的比例表达式为:

公式中,n表示交通空间斑块的数量,i表示城市交通类型,aij表示城市交通类型i中空间斑块j的面积,A表示城市交通的总面积。交通空间斑块占城市面积的比例可以表示出城市交通的组成成分,反映出某城市交通类型在整个城市的比例。
以上从城市交通空间斑块的凝聚度、交通空间散布与并列指数、交通空间斑块占城市面积的比例三个指数,预测了城市交通空间分布格局的变化情况,接下来通过城市交通空间的规划流程设计,来实现城市交通空间的规划。
3.2 规划城市交通空间
基于城市交通空间利用问题以及传统城市公交空间规划方法存在的缺陷,引入城市公交乘客需求的智能导向,确定基于智能导向的城市交通空间规划方法。首先找出智能导向与城市交通空间两者之间结合发展的关键点,基于这一关键点,研究城市交通空间的规划,形成一个基于智能导向功能的城市交通空间规划方法。最后对智能导向与城市交通空间进行整合,形成智能导向的城市交通空间规划。城市交通空间规划流程如图3所示。
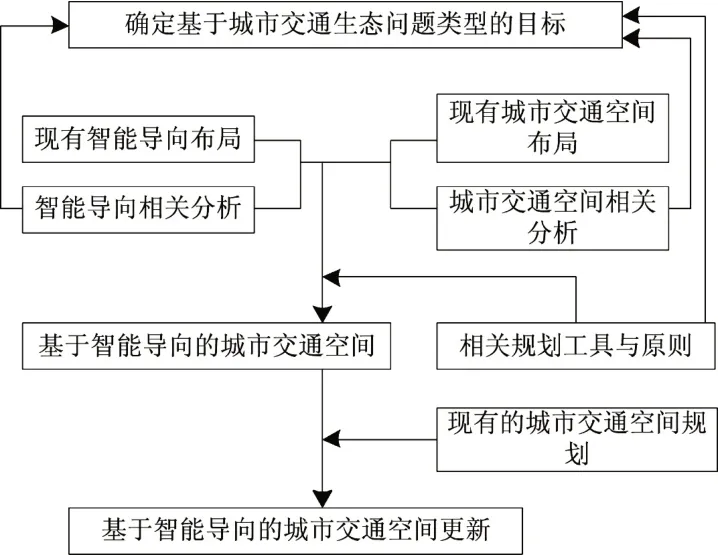
图3 城市交通空间规划流程
综上所述,在智能导向的基础上,从城市交通空间斑块的凝聚度、交通空间散布与并列指数、交通空间斑块占城市面积的比例三个指数,预测了城市交通空间分布格局的变化情况,结合城市交通空间的规划流程,完成了系统的软件设计,实现了城市交通空间的规划。
4 测试分析
4.1 分析城市交通空间格局
在城市交通空间网络的构建过程中,城市交通类型的选择与阻力体系的建立时刻影响着实验结果。利用城市交通空间格局的分析结果,对每一个交通空间的指数进行归一化处理,在研究区域内选择200个城市交通空间类型,改变原有类型的主观性,为实验测试结果提供保障。由于城市道路对城市交通空间的影响很大,会将原有的空间进行分割,导致城市交通系统紊乱,因此,在选取阻力指标过程中存在很多道路因子影响分析结果。通过分析每一个阻力因子来确定不同道路因子的权重,如表1所示。
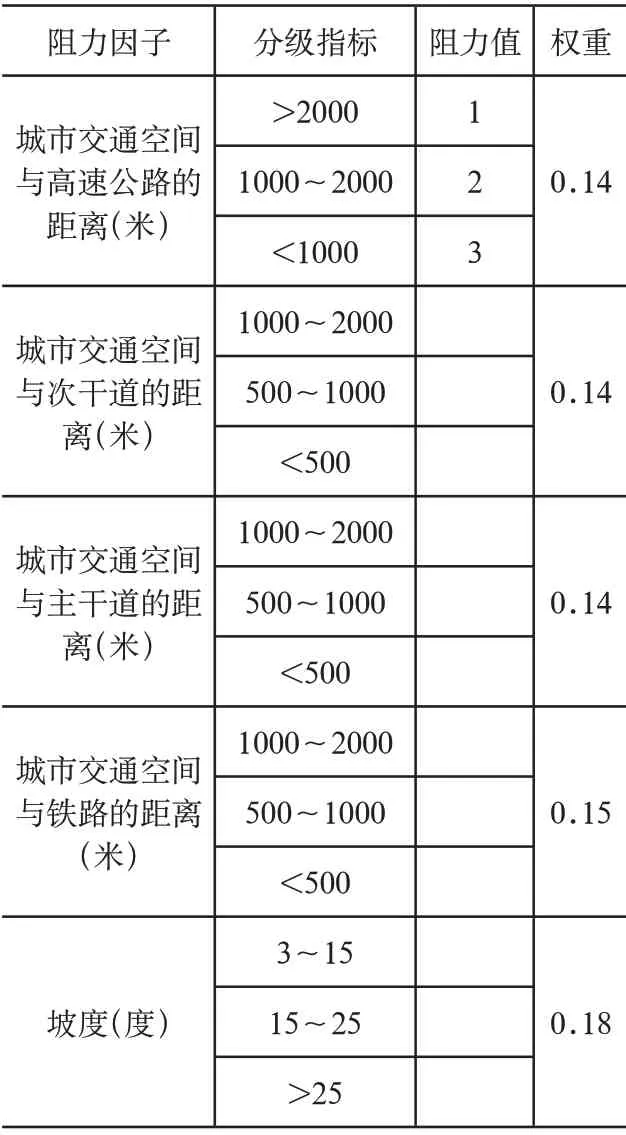
表1 阻力赋值表
4.2 城市交通空间规划效率对比测试
利用城市交通空间格局的分析结果,分别采用基于智能导向的城市交通空间规划系统、文献[4]的规划系统以及文献[5]的规划系统,来规划城市交通空间,得到城市交通空间规划效率对比结果,如图4所示。
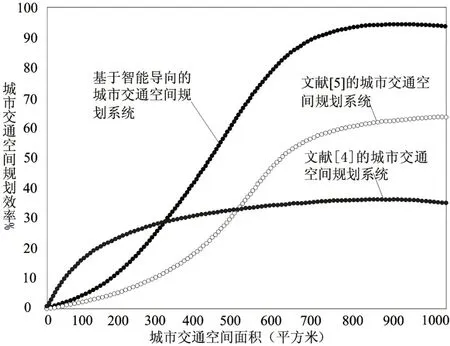
图4 城市交通空间规划效率对比结果
从图4的测试结果中可以看出,采用文献[4]的规划系统来规划城市交通空间时,由于该系统在硬件端口设计没有采集到准确的城市交通空间数据,导致系统的硬件的运行过程中经常会出现故障,部分规划结果在测试过程中丢失,降低了城市交通空间规划效率;采用文献[5]的规划系统来规划城市交通空间时,该规划系统虽然采集了城市交通空间数据,也将服务器应用到了系统的硬件设计中,但是由于服务器与浏览器之间的数据传输缺少连接装置,造成数据传输经常中断,也使得城市交通空间的规划效率不高;而采用本文设计的基于智能导向的城市交通空间规划系统来规划城市交通空间时,该系统不仅设计了数据采集模块和服务器,还将MapObject 组件也应用到了系统的硬件配置中,从而提高了城市交通空间的规划效率。
4.3 城市交通空间规划精度对比测试
利用城市交通空间格局的分析结果,分别采用基于智能导向的城市交通空间规划系统、文献[4]的规划系统以及文献[5]的规划系统,来规划城市交通空间,得到城市交通空间规划精度对比结果,如图5所示。
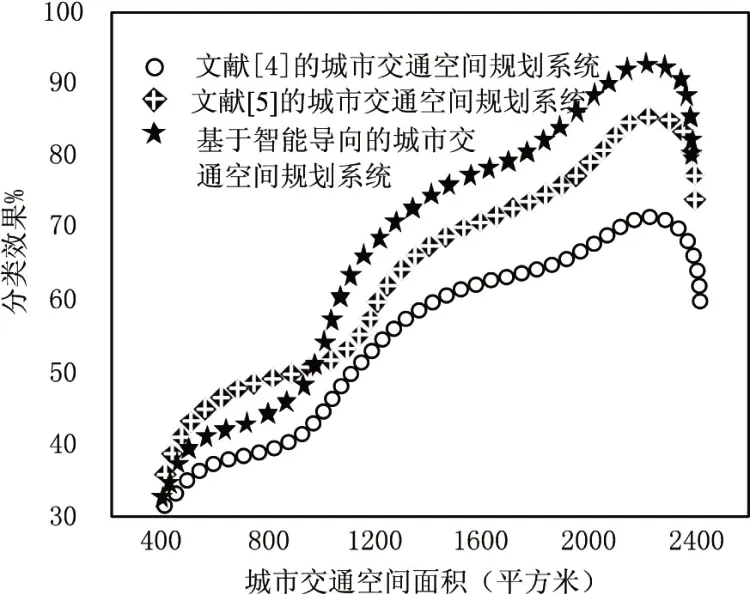
图5 城市交通空间规划精度对比结果
从图5的测试结果中可以看出,采用文献[4]的规划系统来规划城市交通空间时,由于该系统只从城市交通空间斑块的凝聚度这一个方面,预测了城市交通空间分布格局变化,导致预测结果存在单一性,使城市交通空间的规划精度不高;采用文献[5]的规划系统来规划城市交通空间时,虽然解决了预测结果的单一性问题,但是在规划流程设计中缺少规划工具,降低了城市交通空间规划精度;采用基于智能导向的城市交通空间规划系统来规划城市交通空间时,该系统从城市交通空间斑块的凝聚度、交通空间散布与并列指数、交通空间斑块占城市面积的比例三个指数,预测了城市交通空间分布格局的变化情况,从而提高了城市交通空间的预测精度。
5 结束语
本文设计了基于智能导向的城市交通空间规划系统设计,在智能导向的基础上,通过设计城市交通空间规划系统的硬件和软件,完成了系统的设计,测试结果显示,该系统在规划效率和规划精度方面,都可以提高城市交通空间规划效果。但是在今后的研究工作中,还要进一步深入研究,解决不同用户对城市交通空间的需求问题。