欠驱动搬运机器人轨迹跟踪控制
2022-02-22张婷婷张伟王亚刚
张婷婷,张伟,王亚刚
欠驱动搬运机器人轨迹跟踪控制
张婷婷,张伟,王亚刚
(上海理工大学 光电信息与计算机工程学院上海 200093)
为了解决欠驱动搬运机器人的中心和质心不重合的轨迹跟踪问题。建立非完整性约束的欠驱动机器人的运动学和动力学的模型,基于反步法控制策略生成新的虚拟反馈量,设计跟踪控制器,同时,利用自适应技术对具有不确定跟踪控制器的参数进行校正,通过Lyapunov理论验证控制器的稳定性。仿真实验结果表明,欠驱动搬运机器人的实际轨迹可以快速地跟踪期望轨迹,验证了基于反步法设计的跟踪控制器的可行性和有效性。设计的控制器能够使搬运移动机器人达到良好的轨迹跟踪效果,并且保证了控制器的自适应性。
欠驱动搬运机器人;轨迹跟踪;反步法;自适应;Lyapunov
搬运机器人广泛应用于工业生产,其中叉车型搬运机器人是工业上常见的典型搬运机器人,随着科技的快速发展以及生产生活的需求,AGV(Automated guided vehicle)孕育而生。AGV是一种新型的智能搬运机器人,具有智能化,高精度,实现“人到货”与“货到人”主旨。它根据实际需要,设计多种类型来适用于不同的环境。其中大部分AGV基于轮式移动机器人(WMR)研发。近年来,WMR的控制吸引了研究者的关注[1-8]。轮式移动机器人(WMR)是一种结构简单,灵活性高、自主性强、操作性能好的通用移动机器人。为了提高移动机器人的自主性,研究的内容一般集中在移动机器人定位[1-2],稳定性[3-4],轨迹跟踪控制[5-6],路径规划[7-8],避障[9]等问题。
文中研究轨迹跟踪问题,由于WMR自身的结构问题,WMR在电机加工过程中会受到纯粹的非完整约束[10],因此在运动过程中会受到非完整系统的控制。对此,Hisao等[11]通过将“静态”和“动态”状态反馈线性化来解决参考轨迹的稳定性跟踪问题。贾鹤鸣等[12],引入反步法用于移动机器人的跟踪控制中,通过反步法设计控制器,引入虚拟控制速率,并通过Lyapunov理论证明控制器的稳定性。对此,反步法设计的控制器广泛应用于WMR轨迹跟踪理论中。对于轮式移动机器人建立的模型出现外界干扰或是参数不确定性的问题,徐俊艳等[13]基于反步法的基础上,结合了自适应模糊滑模控制算法来调节参数。周加全等[14]采用反步法与神经网络算法设计控制器,对不确定项补偿,提高轨迹跟踪的精度。赵珈靓等[15]考虑机器人未知扰动的情况下,利用反步法思想设计线性自抗扰控制器。
上述文献的研究都是假定基于WMR的质心与中心是同一位置的情况下分析轨迹跟随,但是,由于机器人硬件设备(微处理器,驱动器和传感器等)放置以及机器人搭载设备组件的原因,WMR的质心和中心大多数是不重合的。针对移动机器人的质心与中心未在同一位置情况下(中心是指机器人驱动轮轴线的中心),文中基于反步法(Back-stepping)设计一种用于产生速度指令运动控制器,由于机器人质心与中心不重合,运动学模型出现未知参数,文中引入自适应方案来调节未知参数,利用Lyapunov理论证明系统的稳定性。为了使中心和质心不重合搬运机器人快速跟踪期望轨迹,提出基于反步法控制策略。
1 移动机器人的模型建立
1.1 运动学模型
文中研究的搬运机器人为AGV的一种欠驱动非完整约束性轮式移送机器人。轮式移动机器人根据左右2个轮来驱动,从而实现机器人的姿态。利用坐标系建立搬运机器人的运动学的模型见图1。针对非完整系统移动机器人的模型作假设条件:驱动轮与地面之间的接触为纯滚动且无打滑;机器人的质心与中心不重合。


图1 搬运机器人的运动学模型
搬运机器人在纯滚动下的约束方程为:

车轮在无侧滑的约束方程为:

由式(1),式(2)可得机器人的运动学方程:

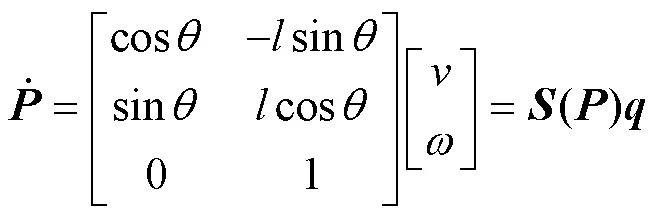
搬运移动机器人位姿的状态方程为:
1.2 搬运机器人动力学描述
移动机器人的动力学模型有4种表示方式:拉格朗日法、牛顿-欧拉法、参数分离法、最小惯性表示法。文中在不考虑外界干扰和摩擦力情况下,采用拉格朗日动力学方程,欠驱动搬运机器人的动力学方程可表示为:


2 轨迹跟踪误差模型的建立
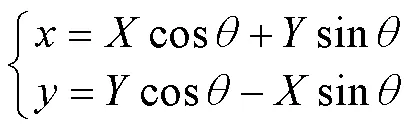
地球坐标系与本体坐标变换的关系可表示为:
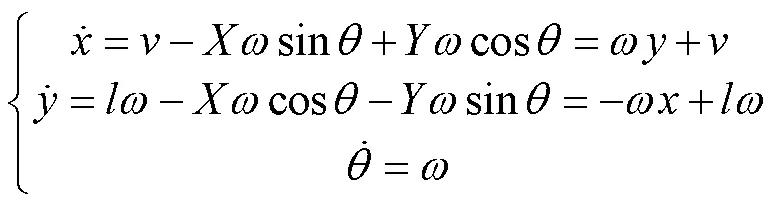
由式(7)可将欠驱动移动机器人运动学方程可转换为:
搬运移动机器人的轨迹跟踪误差模型见图2。
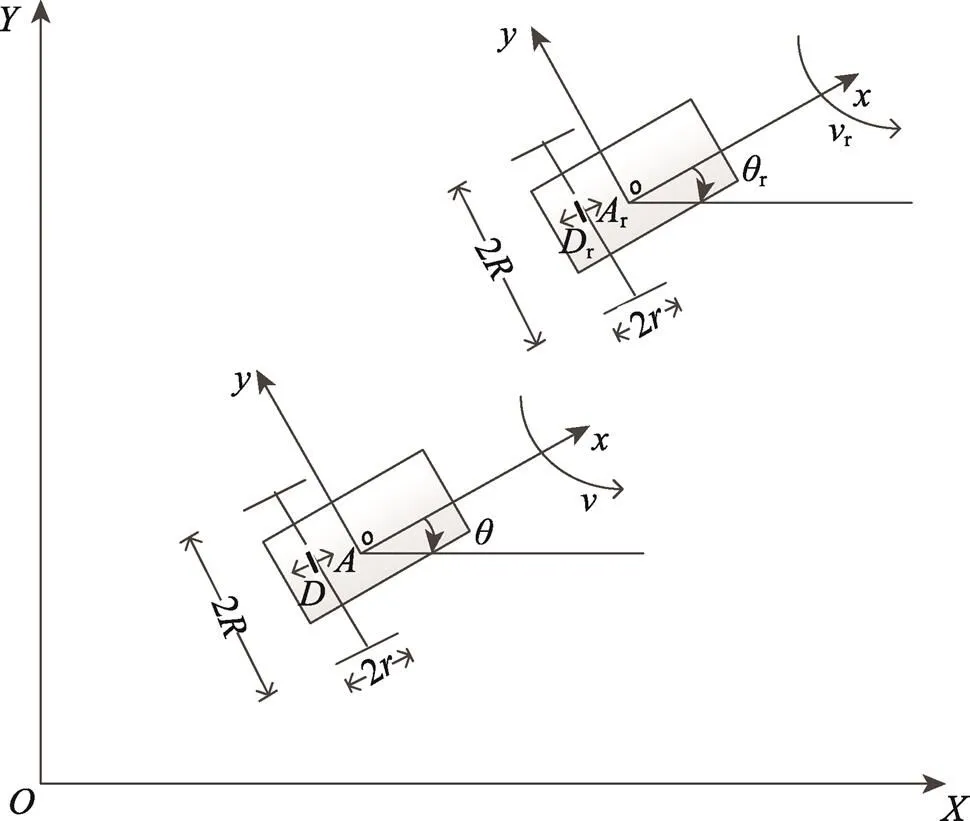
图2 搬运机器人的跟踪误差模型
设机器人的跟踪位置误差为:
机器人的跟踪位置误差的微分方程为:

3 反步法控制器设计


图3 搬运机器人的轨迹跟踪的系统结构
对式(13)微分得:

设计速度控制率为:
设期望的速度误差为:

证明:
取李雅普诺夫函数:

李雅普诺夫函数的微分为:


4 系统仿真
从图4可以看出,采用反步法(Back-Stepping)与自适应技术的跟踪控制的搬运机器人的轨迹跟踪有良好的效果。根据图5中可观察出,系统的跟踪误差收敛得较快,在0时刻跟踪误差可收敛至0。图6中的控制输入随参数校正而变化,图7是机器人质心与中心的估计值随时间的响应曲线,表明了位置参数的有界性。通过Matlab仿真验证文中设计的跟踪控制器的有效性。
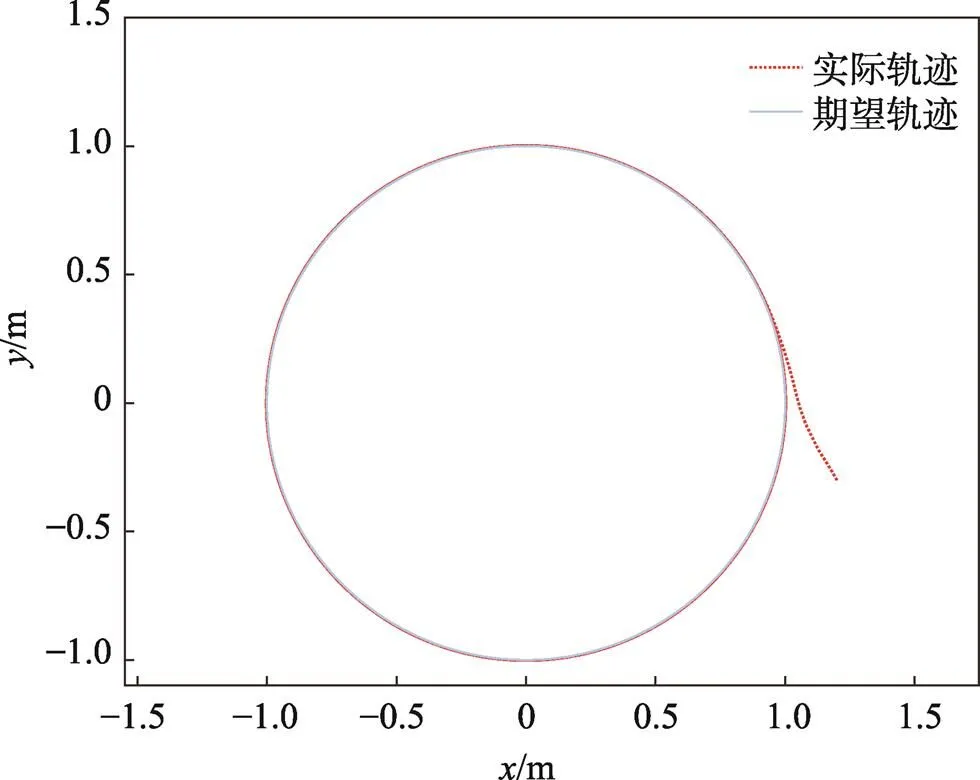
图4 搬运机器人轨迹跟踪结果
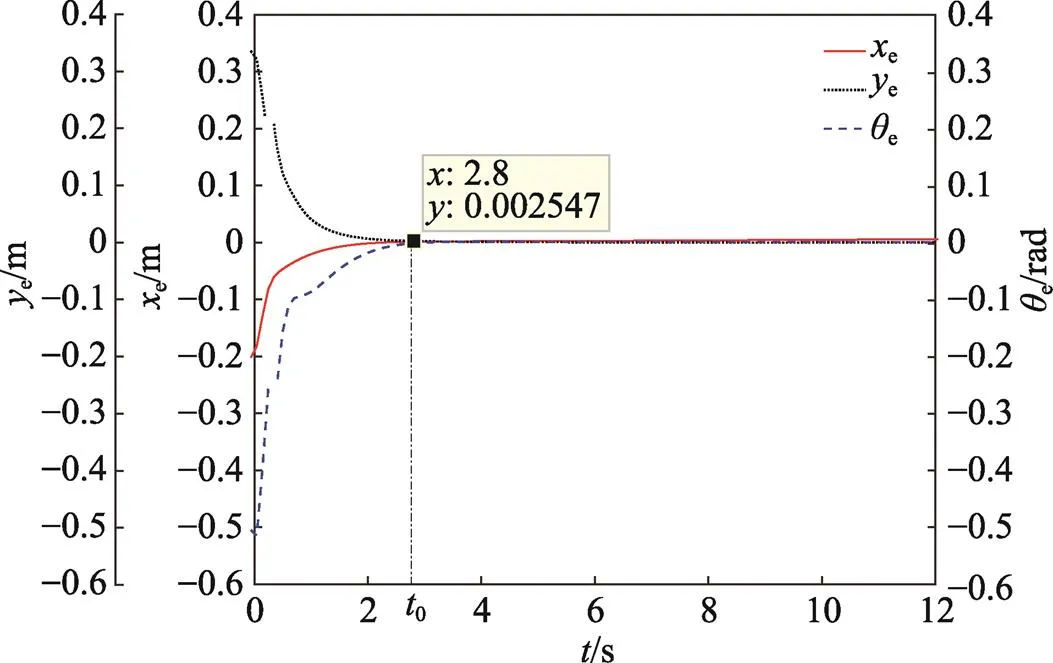
图5 误差收敛效果

图6 控制输入变化
根据图8—10的对实验中,发现系统在文中提出的控制器器的e,e都收敛至0,但是文献[17]中e没有收敛至0,因此,文中提出的控制器使得移动机器人在误差较大的情况下是有效的。

图7 估计值变化
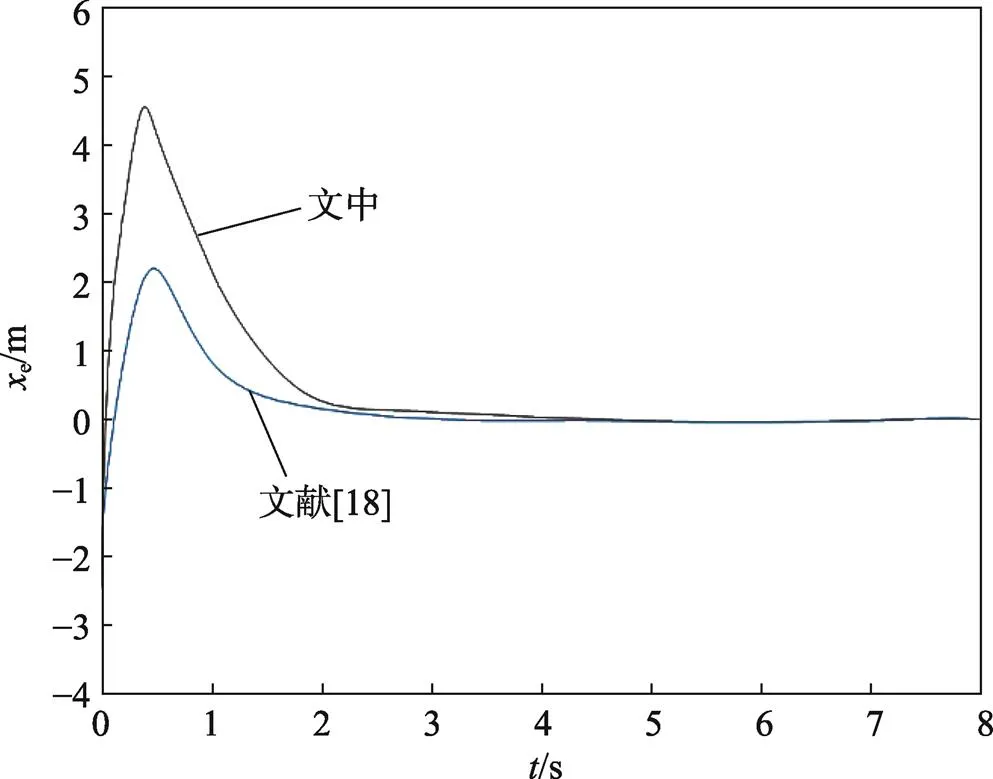
图8 xe收敛对比
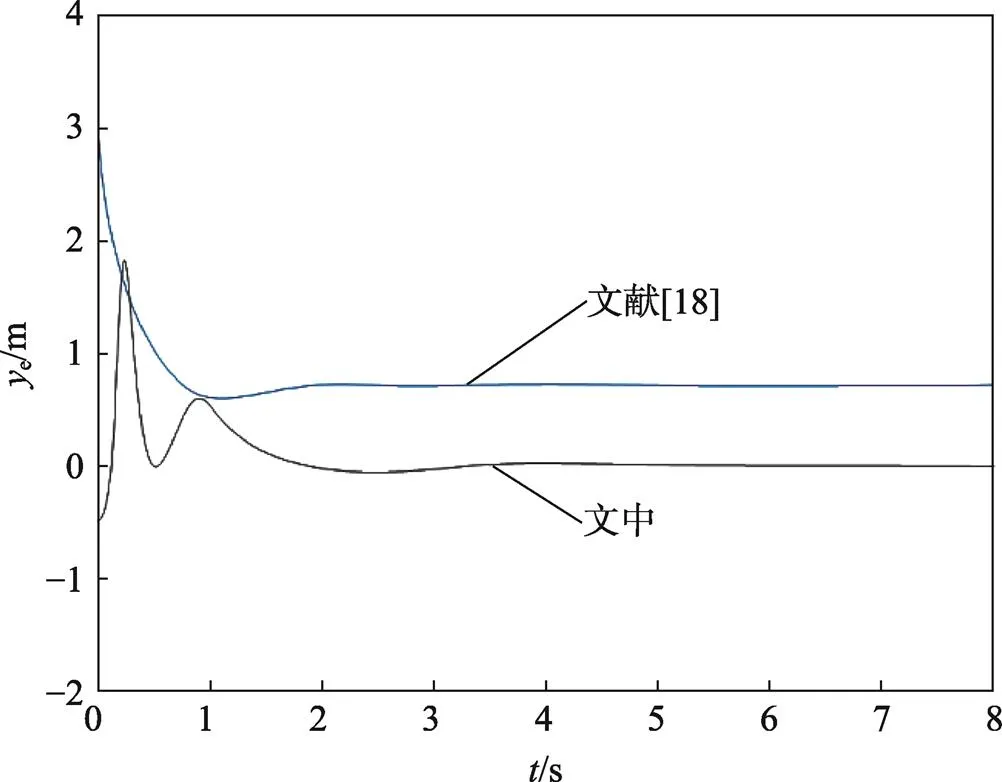
图9 ye收敛对比
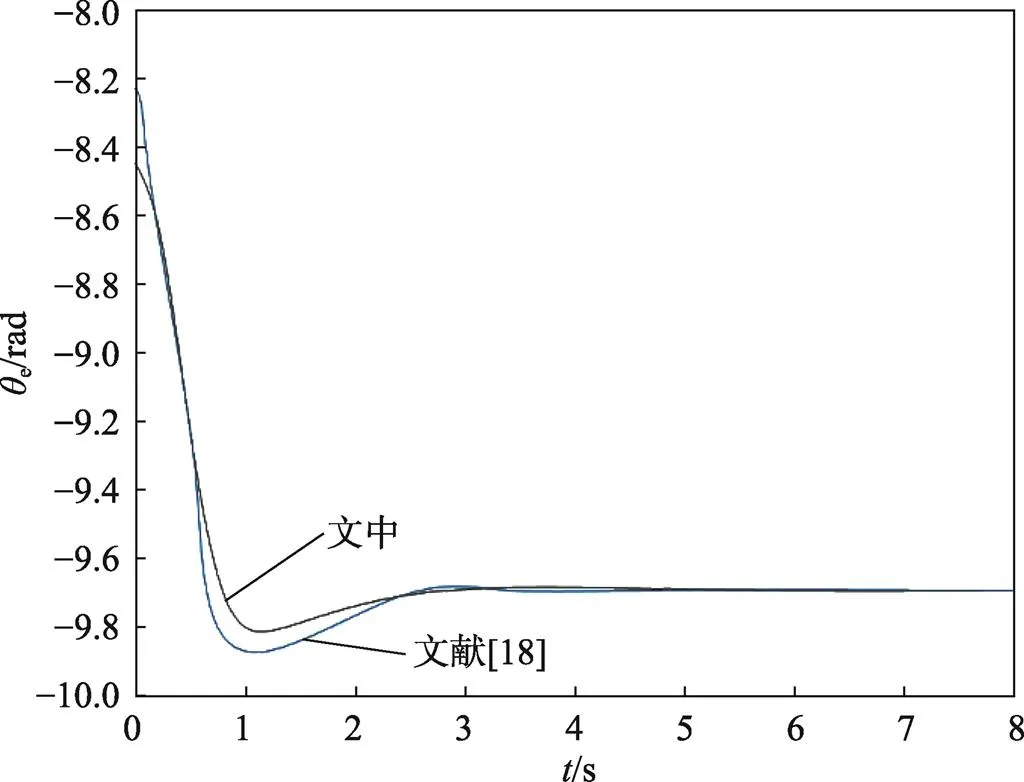
图10 θe收敛对比
5 结语
文中针对欠驱动非完整性搬运机器人的轨迹跟踪问题,设计了跟踪控制器。在搬运机器人的质心和中心不重合的情况下,建立机器人运动学和动力学方程时,出现了不确定的参数。为了解决不确定参数的问题,通过反步法设计控制器,并设计参数估计值的自适应技术满足了轨迹跟踪控制器,并且利用Lyapunov稳定理论验证系统的全局稳定。文中设计的控制器通过反步法与自适应技术的结合,良好地实现搬运移动机器人的轨迹跟踪。
[1] Jetto L, Longhi S, Vitali D. Localization of a Wheeled Mobile Robot by Sensor Data Fusion Based on a Fuzzy Logic Adapted Kalman Filter[J]. Control Engineering Practice, 1999, 7(6): 763-771.
[2] SUN Chung-hun, HUANG Sheng-kai, YE Cheng-wei, et al. Laser-Range-Finder Localization Based Fuzzy Control for Mobile Robots[J]. Engineering Computations, 2017, 34(7): 2409-2421.
[3] DING Shi-hong, LI Shi-hua, LI Qi. Global Uniform Asymptotical Stability of a Class of Nonlinear Cascaded Systems with Application to a Nonholonomic Wheeled Mobile Robot[J]. International Journal of Systems Science, 2010, 41(11): 1301-1312.
[4] Arman M, Saeed E. Simultaneous Surface Scanning and Stability Analysis of Wheeled Mobile Robots Using a New Spatial Sensitive Shield Sensor[J]. Robotics and Autonomous Systems, 2017, 98(7): 1-14.
[5] Du Li-min. Double Closed Loop Controller of Wheeled Mobile Robot for Trajectory Tracking Based on Back-Stepping and Lyapunov Method[C]// Research Institute of Management Science and Industrial Engineering. Proceedings of 2017 2nd International Conference on Materials Science, Machinery and Energy Engineering, 2017: 1400-1406.
[6] 赖欣, 陆阳, 周乐, 等. 轮式移动机器人的Back-stepping滑模模糊自适应轨迹跟踪控制[J]. 机械科学与技术, 2018, 37(12): 1834-1840.
LAI Xin, LU Yang, ZHOU Le, et al. Trajectory Tracking with Back-Stepping Sliding Mode Fuzzy Adaptive Control for Wheeled Mobile Robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(12): 1834-1840.
[7] BAI Guo-xing, Meng Yu, Liu Li, et al. Anti-Sideslip Path Tracking of Wheeled Mobile Robots Based on Fuzzy Model Predictive Control[J]. Electronics Letters, 2020, 56(10): 490-493.
[8] Noboru N, Kazunobu I, Hideo T. Turning Function Based on Dynamic Path Creation for Agricultural Mobile Robot[J]. IFAC Proceedings Volumes, 2001, 34(19): 191-195.
[9] 柴慧敏, 陈奋增, 方敏, 等. 贝叶斯网络与模糊理论的移动机器人避障[J]. 控制工程, 2020, 27(10): 1657-1664.
CHAI Hui-min, CHEN Fen-zeng, FANG Min, et al. Obstacle Avoidance for Mobile Robot Based on Bayesian Networks Model and Fuzzy Theory[J]. Control Engineering of China, 2020, 27(10): 1657-1664.
[10] Komanovsky H, Macclam R H. Developments in Nonholonomic Control System[J]. IEEE Control Systems Magazine, 1995, 15(6): 20-36.
[11] Hisao N, Kazuhiro S, Kenshi S. Vibration Control of a Wheeled Mobile Robot Based on Disturbance Observer[J]. JSME International Journal, 1993, 36(4): 442-447.
[12] 贾鹤鸣, 宋文龙, 陈子印, 等. 基于神经网络反步法的移动机器人路径跟踪控制[J]. 南京理工大学学报(自然科学版), 2014, 38(1): 27-33.
JIA He-ming, SONG Wen-long, CHEN Zi-yin, et al. Path Following Controller for Mobile Robots Based on Neural Network Backstepping[J]. Journal of Nanjing University of Science and Technology, 2014, 38(1): 27-33.
[13] 徐俊艳, 张培仁. 非完整轮式移动机器人轨迹跟踪控制研究[J]. 中国科学技术大学学报, 2004, 34(3): 376-380.
XU Jun-yan, ZHANG Pei-ren. Research on Trajectory Tracking Control of Nonholonomic Wheeled Mobile Robots[J]. Journal of University of Science and Technology of China, 2004, 34(3): 376-380.
[14] 周加全, 谭丽娟, 李志明, 等. 移动机器人轨迹跟踪控制的研究[J]. 电脑知识与技术, 2020, 16(31): 219-221.
ZHOU Jia-quan, TAN Li-juan, LI Zhi-ming, et al. Research on Trajectory Tracking Control of Mobile Robot[J]. Computer Knowledge and Technology, 2020, 16(31): 219-221.
[15] 赵珈靓. 基于自抗扰控制的全方位移动机器人轨迹跟踪研究[D]. 天津: 天津大学, 2018: 17-39.
ZHAO Jia-liang. Trajectory Tracking of Omnidirectional Mobile Robot based on Active Disturbance Rejection Control[D]. Tianjin: Tianjin University, 2018: 17-39.
[16] TAO G. A Aimple Alternative to The Barbalat lemma[J]. IEEE Transactions on Automatic Control, 2002, 42(5): 698.
[17] 宋立业, 邢飞. 移动机器人自适应神经滑模轨迹跟踪控制[J]. 控制工程, 2018, 25(11): 1965-1970.
SONG Li-ye, XING Fei. Adaptive Neural Sliding Mode Trajectory Tracking Control for Mobile Robots[J]. Control Engineering of China, 2018, 25(11): 1965-1970.
Trajectory Tracking Control of Under-Actuated Handling Robot
ZHANG Ting-ting, ZHANG Wei, WANG Ya-gang
(School of Optical-Electrical and Computer Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China)
The work aims to solve the trajectory tracking problem of a class of under-actuated handling robots when the centroid and the center are not coincident. The kinematics and dynamics models of under-actuated robot with nonholonomic constraints were established. Based on the back-stepping control theory, a new virtual feedback was constructed and a tracking controller was designed. At the same time, the adaptive technique was introduced to correct the parameters of the tracking controller with uncertainties. The global stability of the control system was proved by Lyapunov theory. The simulation results showed that the actual trajectory of the under-actuated handling robot could quickly follow the desired path. The feasibility and effectiveness of the tracking controller based on back-stepping method were verified.The designed controller can make the handling robot achieve good trajectory tracking results, and ensure the adaptivity of the controller.
under-actuated handling robot; trajectory tracking;back-stepping; adaptivity; Lyapunov
TB486;TP301.6
A
1001-3563(2022)03-0210-07
10.19554/j.cnki.1001-3563.2022.03.026
2021-08-26
国家自然科学基金项目(11502145, 61703277, 61074087)
张婷婷(1996—),女,上海理工大学硕士生,主攻轨迹跟踪。
张伟(1981—),男,博士,上海理工大学副教授,主要研究方向为最优控制。