气调包装机气体流量控制系统设计
2022-02-22曹芳菊梁舒张爽
曹芳菊,梁舒,张爽
气调包装机气体流量控制系统设计
曹芳菊1,梁舒1,张爽2
(1.邢台职业技术学院,邢台 054000;2.西安理工大学,西安 710048)
为提高气调包装充气过程的稳定性、气体流量控制精度,基于内模滑模原理设计一种气体流量控制器。以盒式气调包装机为例,介绍其基本结构和包装流程。针对充气过程的非线性和滞后性,提出一种内模滑模控制系统。该控制系统包括:控制模块、流量监测模块和执行模块。在滑模控制的基础上,引入预估补偿模型可消除纯滞后导致的时间延迟,并给出改进的滑模控制方程和滑模面。最后,进行实验研究。实验结果表明,与滑模控制相比,内模滑模控制进行气体流量控制所需调节时间只需1~3 s,缩减幅度达到90%以上,没有超调量;实际控制精度可以达到±0.8 mL/min。内模滑模控制的响应速度更快、控制精度更高,对气体流量控制效果比较理想。
气调包装;气体流量控制;内模滑模控制;响应滞后
气调包装可以在很大程度上延长食品的货架期,主要是因为气调包装可以改变包装内部气体成分,可以减缓食材呼吸速率、阻止微生物生长、预防霉变 等[1-3]。随着相关技术不断发展以及消费需求激增,气调包装已成为使用十分广泛的食品保鲜技术。一般情况下,气调包装大多使用二氧化碳、氧气和氮气,根据食品特性将3种气体按不同比例混合后充入包装中,最大程度延长货架期、提升保鲜度[4-5]。虽然气调包装已成为食品保质、果蔬产品保鲜的有效手段,但是气调包装效果取决于诸多因素,例如:包装力学性能、包装材料阻隔性、混合气体成分等。除此之外,充气时间、充气压力以及包装袋内压力等也会影响实际保鲜效果。如何确保充气过程压力稳定以及包装袋内气体定量控制是实现气调包装效果、提高包装质量的关键[6-7]。
文中以充气过程恒流量控制为主要研究对象,在盒式气调包装机的基础上,设计一种气体流量控制器,以期实现气体流量稳定,并通过仿真和实验验证所述方法的有效性。
1 气调包装机组成及原理
以盒式气调包装机为例,如图1所示,该包装机包括:1.上模具、2.电控柜、3.包装膜输送机构、4.触摸屏、5.包装盒输送机构、6.储气罐、7.机架、8.下模具。包装盒输送速度要求可调,可采用步进电机驱动带推杆的链条实现;包装膜输送长度要匹配不同尺寸包装盒,可采用PLC控制刹车电机实现包装膜的精准控制;气体置换方式采用真空补偿法,即先将包装盒内空气抽出,然后填充保护气体;封合方式采用板式热封法,利用上下压板完成包装盒与包装膜压合,通过加热使包装膜熔融并与包装盒粘合。热封温度根据不同包装材料进行调节。
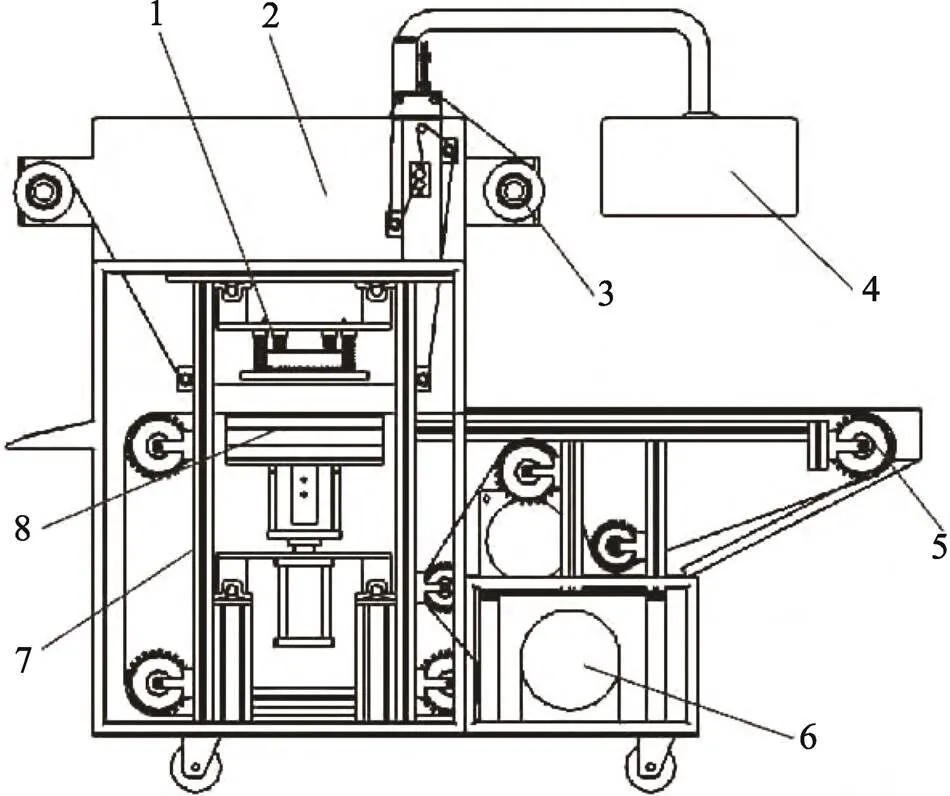
1.上模具2.电控柜3.包装膜输送机构4.触摸屏5.包装盒输送机构6.储气罐7.机架8.下模具
气调包装流程可简要如下描述。
1)混合气体调制。利用气体混合配置装备实现CO2、N2和O2等3种气体按一定比例混合并储存在储气罐内。
2)包装袋抽气。在一定时间内,将包装盒内气体抽出使其真空度达到包装要求,减少剩余气体可提高充气精度。
3)混合气体充入。在一定时间内以稳定流速将已混合气体充入包装盒内。最后,进行包装盒封口,包装盒内需储存一定数量的混合气体并保持一定的包装顶空体积。
文中以混合气体充入过程为研究对象,利用内模滑模控制算法实现气体流量恒定,保证充气过程稳定可靠。
2 气体流量控制
气体流量控制过程可描述为:已压缩混合气体从储气罐中释放经减压阀进入管道,流量计实时检测气体流量;流量值经整形、放大、A/D转换后送入控制系统,与设定值流量值进行比较、计算、处理后可得到一组控制信号;该控制信号可调节电磁阀开度,使流量值逐渐达到要求值。
流量计所使用气体流量传感器的响应曲线具有一定非线性,为解决此问题,文中采用滑模控制使系统状态点沿轨迹逐渐稳定到平衡点,滑模控制的表达式可描述为:
(1)
为进一步解决响应延迟问题,文中设计了一种内模滑模控制器,在滑模控制中加入一个预估补偿模 型——一阶加纯滞后,以消除纯滞后带来的时间延迟,提高系统动态响应。根据滑模控制原理,一阶加纯滞后的表达式可描述为:
(2)
(3)
(4)
(5)
式中:为可调参数;为设定值;为无滞后输出;为模型误差;为设定值与无滞后输出之间的误差。
图2 内模滑模控制原理
Fig.2 Internal sliding mode control principle
由式(5)可以得到变形公式:
(6)
那么式(5)可以简化为:
(7)
(8)
若将延迟函数(4)代入式(1)并进行微分, 则有:
(9)
那么一阶加纯滞后的模态控制方程[9-10]可表 示为:
(10)
将式(10)代入原滑模控制方程,可以得到滑模控制改进方程,即:
(11)
为提高输出响应特性、加快系统收敛速度、减小系统误差,文中采用Neider-Mead算法对式(11)所示滑模控制方程进行约束[11-13],相应约束方程可描述为:
(12)
(13)
(14)
根据式(12—14)结合滑模控制方程,可得终态滑模控制方程和滑模面,即:
(15)
(16)
3 实验研究
3.1 系统方案设计
总体上,系统主要包括3部分:软件设计、硬件设计和上位机。其中软件设计就是如何实现内模滑模控制算法;硬件设计包括硬件电路和气路结构;上位机,即获取气体传感器动态响应曲线和性能参数。上位机为普通PC机,采用酷睿i7系列处理器,主频可以达到3.5 GHz;主控制器采用STM32F103系列处理器,其采用ARM Cortex-M3内核,该控制器性能高且功耗低。气体流量控制模块主要包括气体流量传感器和蠕动泵,气体流量传感器检测范围为10~1000 mL/min,测试精度为0.1 mL/min;电磁阀采用PWM脉宽控制模式,可根据控制量调节气体实际流量。控制系统设计指标为:调节时间(系统达到设定值并保持稳定状态)不大于3 s;气体流量控制误差小于1 mL/min。主控制器见图3。
图3 主控制器
3.2 实验研究
为进一步验证所述控制方法的有效性,文中进行了相关实验研究。设定气体流量值为300、600和900 mL/min,分别对比滑模控制和内模滑模气体流量控制效果。实际结果见图4。

图4 实验结果
由实验结果可知,滑模控制进行气体流量控制所需调节时间大约为17~20 s;内模滑模控制进行气体流量控制所需调节时间只需1~3 s,最大缩减幅度达到90%以上。内模滑模控制的精度可以达到±0.8 mL/min,而普通滑模控制的精度只有±2 mL/min,气体流量越大精度差距越明显。实验结果表明,所述系统输出稳定性高,整个系统运行十分稳定。
综上所述,与滑模控制相比,内模滑模控制不仅可以提高系统响应速度,而且可以提高系统控制精度,稳定性较好,可实现气调包装气体的稳定输出。
4 结语
以气调包装机充气过程气体流量控制为研究对象,设计了一种基于内模滑模的气体流量控制器。引入预估补偿模式可解决滑模控制的滞后问题。实验结果表明,与传统PID控制和滑模控制相比,所述控制方法具有响应速度快、精度高等特点,可满足气调包装充气过程控制要求,具有一定的借鉴意义。
[1] 雷立雨, 赵有斌, 马季威, 等. 基于PLC的盒式气调包装机设计[J]. 包装与食品机械, 2016, 34(5): 23-27.
LEI Li-yu, ZHAO You-bin, MA Ji-wei, et al. Design of Trays Map Machine Based on PLC[J]. Packaging and Food Machinery, 2016, 34(5): 23-27.
[2] 施帅, 王正云, 蒲丽丽, 等. 气调保藏对苏姜猪肉货架期的影响[J]. 食品与机械, 2011, 27(5): 145-148.
SHI Shuai, WANG Zheng-yun, PU Li-li, et al. Effects of Controlled Atmosphere on Quality of Sujiang Meat in Chilled Storage[J]. Food & Machinery, 2011, 27(5): 145-148.
[3] 赵春霞, 李大虎, 程玉娇, 等. 高氧气调包装对双孢蘑菇品质的影响[J]. 包装工程, 2014, 35(15): 5-10.
ZHAO Chun-xia, LI Da-hu, CHENG Yu-jiao, et al. Effects of Modified Atmosphere Packaging with O2on the Qualities of Agaricus Bisporus[J]. Packaging Engineering, 2014, 35(15): 5-10.
[4] 张玉敏, 胡长鹰, 吴宇梅, 等. 气调包装对番石榴贮藏品质的影响[J]. 食品与机械, 2012, 28(2): 180-183.
ZHANG Yu-min, HU Chang-ying, WU Yu-mei, et al. Effects of Modified Atmosphere Packaging on the Quality of Psidium Guajava[J]. Food & Machinery, 2012, 28(2): 180-183.
[5] 姜浩, 黄俊彦, 林敏. 气调保鲜包装机气体比例混合器的研究[J]. 包装与食品机械, 2006, 24(5): 4-7.
JIANG Hao, HUANG Jun-yan, LIN Min. Study on Proportional Gas Mixer for Modified Atmosphere Packaging Machine[J]. Packaging and Food Machinery, 2006, 24(5): 4-7.
[6] 张希栋, 阎春利. 气调包装实验定量控制装置研究[J]. 森林工程, 2014, 30(5): 188-191.
ZHANG Xi-dong, YAN Chun-li. Researching on Controlling Quantitatively Device for Modified Atmosphere Packaging Experiment[J]. Forest Engineering, 2014, 30(5): 188-191.
[7] 马骋, 梁琪, 文鹏程, 等. 一种适合实验室自制的气调包装充气装置[J]. 食品与机械, 2016(2): 170-172.
MA Cheng, LIANG Qi, WEN Peng-cheng, et al. A Homemade Gas-flushing Device of Map Suitable for Laboratory[J]. Food & Machinery, 2016(2): 170-172.
[8] 程子珍, 张雷, 英昌盛. 基于内模滑模控制法的气体质量流量控制系统的研究[J]. 长春理工大学学报(自然科学版), 2017(1): 30-33.
CHENG Zi-zhen, ZHANG Lei, YING Chang-sheng. Research on Internal Model Sliding Mode Method in Gas Mass Flow Control System[J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2017(1): 30-33.
[9] 赵彬宏, 王建鹏, 王元元. 基于自构建小波神经网络的内模控制[J]. 太原科技大学学报, 2018, 39(4): 255-262.
ZHAO Bin-hong, WANG Jian-peng, WANG Yuan-yuan. Internal Model Control Based on Serf-Constructing Wavelet Neural Network[J]. Journal of Taiyuan University of Science and Technology, 2018, 39(4): 255-262.
[10] 陈春兰. 基于GA的二自由度内模控制[J]. 自动化应用, 2020(4): 55-58.
CHEN Chun-lan. Two Degrees of Freedom Internal Model Control Based on GA[J]. Automation Application, 2020(4): 55-58.
[11] CHAUHAN P, DEEP K, PANT M. Novel Inertia Weight Strategies for Particle Swarm Optimization[J]. Memetic Computing, 2013, 5(3): 229-251.
[12] HOUCINE L, BOUZBIDA M, CHAARI A. Improved Adaptive Particle Swarm Optimization for Optimization Functions and Clustering Fuzzy Modeling System[J]. International Journal of Uncertainty Fuzziness and Knowledge-Based Systems, 2018, 26(5): 717-739.
[13] 王元飞, 张晓静, 贾玉明. 基于内模控制的Smith反向解耦控制器设计[J]. 化工自动化及仪表, 2017, 44(9): 830-834.
WANG Yuan-fei, ZHANG Xiao-jing, JIA Yu-ming. Smith Inverted Decoupling Controller Design Based on Internal Model Control[J]. Control and Instruments in Chemical Industry, 2017, 44(9): 830-834.
[14] 魏立峰, 李雨桐, 杨私, 等. 多模型内模控制的湿化仪温控系统研究[J]. 电子器件, 2020, 43(3): 667-671.
WEI Li-feng, LI Yu-tong, YANG Si, et al. Research on Temperature Control System of Humidifier Controlled by Multi Model Internal Model[J]. Chinese Journal of Electron Devices, 2020, 43(3): 667-671.
[15] 黄宣睿, 宋宇洋, 李秋生, 等. 一种基于内模控制的工业机器人关节伺服系统振动抑制算法[J]. 电工技术学报, 2019, 34(3): 497-505.
HUANG Xuan-rui, SONG Yu-yang, LI Qiu-sheng, et al. A Vibration Suppression Algorithm for Industrial Robot Joint Servo System Based on Internal Model Control[J]. Transactions of China Electrotechnical Society, 2019, 34(3): 497-505.
Design of Gas Flow Control System for Gas Transferring and Packing Machine
CAO Fang-ju1, LIANG Shu1, ZHANG Shuang2
(1.Xingtai Vocational and Technical College, Xingtai 054000, China; 2.Xi'an University of Technology, Xi'an 710048, China)
The work aims to design a gas flow controller based on the internal sliding mode principle, so as to improve the stability and the precision of gas flow control in gas transferring and packing. The basic structure and packing flow of the box-type gas transferring and packing machine were introduced. Aiming at the non-linearity and hysteresis of the aeration process, an internal sliding mode control system was proposed. The control system included: control module, flow detection module and execution module. Based on the sliding mode control, the time delay caused by pure lag was eliminated by the predictive compensation model, and the improved sliding mode control equation and sliding mode surface were given. Finally, the experimental research was carried out. The verification results indicated that compared with the sliding mode control, the adjustment time needed by internal sliding mode control for gas flow control was only 1~3 s, and the reduction range reached more than 90% without overshoot. The actual control accuracy reached ±0.8 mL/min. The internal sliding mode control has the advantages of faster response speed and higher control precision, thus having better effect on gas flow control.
gas transferring and packing; gas flow control; internal sliding mode control; response lag
TB485.9
A
1001-3563(2022)03-0252-05
10.19554/j.cnki.1001-3563.2022.03.031
2021-08-26
曹芳菊(1979—),硕士,邢台职业技术学院讲师,主要研究方向为电气自动化控制、工业机器人等。