LLC谐振变换器的数字均流技术研究
2022-02-19汤旭日刘澜涛肖楠
汤旭日,刘澜涛,肖楠
(黑龙江科技大学电气与控制工程学院,黑龙江哈尔滨,150022)
0 引言
近年来电动汽车的充电桩容量向着大功率的方向发展。由于磁性材料,半导体功率器件等原因,单个电源模块的最大输出功率可能满足不了系统的功率需求,而且在大功率场合中,仅采用单个电源模块工作的话,如果模块出现问题,系统将不能工作。若采用多模块并联运行,在满足功率要求的同时,系统的可靠性与冗余度也能大大提高。多模块并联运行组成的系统在负载变动时,也能可靠地运行,维持稳定的输出功率。然而电源模块不能直接并联使用,必须采取一种并联均流技术来保证系统在任何时候模块间承受的电流应力均衡。与模拟均流技术相比[1],数字均流能简化硬件电路、提高系统抗干扰能力。此外,数字控制具有可编程性,灵活性高,因而更易于适应新的控制方法和控制策略[2]。
通过以上分析本文提出了一种基于CAN总线通讯的数字化均流方案,以全桥LLC为主拓扑,在双环的基础上引入均流环,利用TMS320F28035内置的ECAN模块实现模块间的实时通讯,并通过MATLAB/Simulink仿真平台验证此方案的可行性和优越性。
1 系统结构
图1所示全桥LLC电源并联系统结构框图。本系统通过TMS320F28035进行采样控制,实现原边开关管的零电压开通,副边整流管的零电流关断,同时基于DSP内置的CAN总线通讯,进行模块间的信息交互,实现并联模块的均流输出。

图1 并联系统结构框图
1.1 LLC谐振变换器
数字化,模块化,高频,高效,高功率密度是当代电源的发展趋势,作为一种软开关拓扑,LLC谐振变换器备受关注。本文中LLC原副边均采用全桥结构,全桥LLC谐振变换器的拓扑如下图2所示,其中输入端侧为稳定的直流电压;开关网络由S1,S2,S3,S44个MOSFET构成,每个开关管都有体二极管和寄生电容;谐振网络由谐振电感Lr,谐振电容Cr和励磁电感Lm构成,其中谐振电感是由实际加入电路中的谐振电感与变压器T1原边漏感共同组成的;整流网络由S5,S6,S7,S84个MOSFET和滤波电容 构成,输出端侧为负载。

图2 LLC谐振变换器原理图
LLC的基本工作原理为:开关网络中S1,S2,S3,S4构成全桥结构,其中S1,S4的驱动信号为50%占空比不变的方波,S2,S3的驱动信号与其互补并带有一定的死区时间,输入直流电压经开关网络转换成方波电压UAB,作为谐振网络的输入,此信号经高频谐振以后输出至整流网络,将谐振电压和电流转变成直流电压和电流,供负载使用,从而实现DC/DC变换。与传统PWM变换器不同,LLC是一种通过控制开关频率来实现控制输出电压的谐振电路。
2 并联均流控制策略
2.1 常用的均流技术
(1)输出阻抗法
改变各个电源模块的输出阻抗,尽可能使外特性曲线斜率靠近,该方法最简单,但是均流精度低,且每个模块必须分别调整串联电阻,对于不同额定功率的模块难以实现均流[3]。
(2)主从法
在模块中确定一个模块为主模块,将其作为恒压源,其他从模块作为恒流源,这种均流方法精度高且易于控制,缺点是主模块发生问题将导致整个系统无法正常运行。
(3)平均电流法
依据模块数量求得输出平均电流,各个模块以此作为参考,此方法可以准确均流,缺点是一旦均流母线短路或者某个模块故障,整个电源模块电压将降低,系统将会出现故障[4]。
(4)峰值电流法
根据模块输出电流的大小确定主模块,其他从模块输出向该模块趋近,这种均流方法效果良好,技术相对成熟,易实现,缺点是从模块输出达不到主模块,与主模块的输出电流一直存在误差。
2.2 数字均流技术
综合传统的模拟均流方式的优缺点,为了在简化硬件电路的同时使系统高效稳定且灵活的运行,本文提出了一种基于CAN总线的数字均流控制方式,将主从法和平均电流法进行结合,通过CAN总线进行数据的交互,这样在精准均流的同时又弥补了主从法和平均电流法的不足。
均流控制的基本原理:各模块通过CAN总线将电流采样值送至主模块,主模块确定模块数量后根据这些电流采样值计算出平均值Iav,再将此值传回各个模块,各模块以此作为输出参考值,最后经主控芯片的数字运算进行频率调制[5],调节了模块的输出电压也就改变了各模块的输出电流。
本文的均流控制策略为在双环控制中加入均流环,均流环的输入是总模块输出电流的平均值和当前模块输出的电流值,电压环的输入是模块的输出电压和电压给定值,电流环的输入为电压环输出的PI结果,均流环输出的PI结果和当前模块输出的电流值,三者经PI运算后,将结果送入EPWM模块,从而改变全桥LLC谐振电源模块的开关频率,这样构成的三环控制使得系统最终实现输出恒压,模块均流。如图3为三环控制示意图。
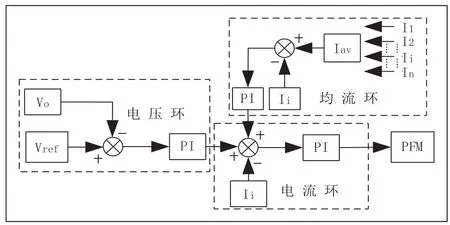
图3 三环控制原理图
2.2.1 三环控制的小信号建模
并联系统的控制框图如图4所示。

图4 三环控制的系统框图
图中各个表达式的含义如下:
Gcv(s)---电压环的传递函数
Gcs(s)---均流环的传递函数
Gcc(s)---电流环的传递函数
Gid(s)---频率到输出电流的传递函数
H(s)---电流信号到电压信号的传递函数
Fm(s)---PFM驱动的传递函数
Gv(s)---频率到输出电压的传递函数
电压环的开环增益为:

均流环的开环增益为:

电流环的开环增益为:

整个系统的闭环增益可以表示为:

3 仿真验证
根据前文分析设计出满足全桥LLC谐振变换器的元件参数,输入电压Uin=650V~750V,额定输入电压为700V,额定输出电压Uo=110V,输出电流Io=20A,各元件参数如表1所示。

表1 元件参数表
为了使两个谐振电源模块输出电流存在差异,仿真中加入R1,R2作为模块1和模块2的输出阻抗,其中R1= 0 .05R,R0.1R。LLC谐振变换器并联系统仿真如图5示,由于LLC是通过改变开关管的频率进而改变输出电压的直流变换拓扑,所以本次仿真采用Simulink中的VCO模块完成频率调制。

图5 LC谐振变换器并联系统仿真模型
图6和图7为并联系统在加入均流环前后的的仿真波形,其中 为模块1的输出电流,Io2为模块2的输出电流,从仿真结果分析可知,并联系统在加入均流环后,系统动态响应时间缩短而且模块间输出电流误差减小,大大提高了均流精度。

图6 未加均流环时两模块的输出电流

图7 加入均流环时两模块的输出电流
4 总结
本文首先对LLC谐振变换器的工作原理进行了简单介绍,基于现有的均流策略,提出一种基于CAN总线的并联均流方案,通过Simulink搭建仿真模型,从加入均流环前后的仿真结果分析验证,该方案可行。虽然当前模块均流已经相对成熟,但是在均流精度以及均流速度方面仍旧有待提高。
