基于TRIZ理论的爬梯式行李箱设计
2022-02-19邓末芝郑峰徐瑞康程世杰牛礼民
邓末芝,郑峰,徐瑞康,程世杰,牛礼民
(安徽工业大学机械工程学院,安徽 马鞍山 243032)
0 引言
行李箱是日常出行中不可缺少的物品,但在出行过程中难免遇到楼梯、台阶等不方便行李箱行走的路段。在火车站、地铁站等地方经常看到旅客提携沉重的行李箱上下楼梯,入住酒店需要提着行李箱跨过酒店门口的台阶,十分不便。针对上述问题,本团队基于TRIZ理论分析,设计了一种爬梯半径可连续变化的三星轮,将其与普通行李箱相结合,构成了爬梯式行李箱的主体部分,该设计很好地解决了出行中提携行李箱上下楼梯困难的问题,为TRIZ理论的实际应用提供了有益参考。
1 爬梯式行李箱研究现状
随着经济社会的发展及交通的愈加便利,现今人们的出行变得频繁,对于一款可以爬梯的行李箱具有较大的市场需求,因此行李箱的设计不仅要注重产品质量、外观、材质等,更要注重产品附加的爬梯功能。高天禹等[1]在行李箱的背面设置滑动履带,从而实现爬梯功能。章天奇等[2]设计的会上楼梯的可变容可折叠的行李箱,利用三星轮机构通过星轮架绕回转中心公转,星轮轮流作支点交替翻转实现攀爬楼梯的功能。
在上述的爬梯式行李箱设计研究中,大多设计方案都是采用履带式和三星轮式这两种爬梯方案。但是这两种设计方案都存在一定的不足之处,其适用范围都有一定的局限性。
2 现有爬梯式行李箱存在的问题
2.1 履带式爬梯行李箱
图1所示为履带式爬梯行李箱腹部图,爬梯动作的完成需先将行李箱放倒,姿态如图2所示,然后拖拽行李箱拉杆,使得行李箱沿楼梯前行。在到达楼梯尽头时,需要将行李箱提起,并调整拉杆。

图1 行李箱腹部

图2 行李箱爬梯姿态
履带式爬梯行李箱使用时存在以下问题:
1)无法很好地适应台阶数量少的情况,使用时十分不便;由于履带式爬梯行李箱的履带本身长度较长,在台阶数量较少(例如酒店、宿舍楼等入口处的台阶)时,往往在尚未拖拽行李箱或者拖拽极短的距离时,行李箱就需要重新提起。在这种情况下,使用履带式爬梯行李箱就很麻烦,不能很好地解决问题。
2)其拖拽时所占空间较大,无法适应人流量大、拥挤场所的楼梯(例如通过火车站、地铁口、商场的楼梯);如图2所示,在爬梯时,行李箱与水平方向的倾角较小,导致其拖拽时需要占据较大的空间。
3)部分履带式爬梯行李箱的履带使用电动机驱动,并采用内置式,即将履带收于图1所示的行李箱腹部,此外电驱动设备结构复杂,这样挤占了较大的储物空间。

2.2 三星轮式爬梯行李箱
图5所示为三星轮式爬梯行李箱,其工作原理是每个星轮及星轮架可以绕星轮架主轴公转,同时每个星轮也可以绕自身星轮轴自转[2]。三星轮机构通过星轮架绕回转中心公转,星轮轮流作支点交替翻转实现攀爬楼梯的功能[4]。使用三星轮式爬梯行李箱时存在以下问题:1)三星轮式爬梯时存在较大的冲击载荷。三星轮机构通过星轮架绕回转中心公转,星轮轮流作支点交替翻转以实现攀爬楼梯,在此过程中,由于星轮的交替翻转与台阶面接触的过程中会产生冲击载荷。2)三星轮式行李箱三星轮的回转半径为确定值。如果采用大回转半径的三星轮,可攀爬的台阶高度范围较大,适用于不同高度的台阶,但是在爬梯时其所受的冲击载荷大。但如果采用回转半径小的三星轮,可攀爬的台阶高度范围较窄,无法很好地适应不同高度的台。为此,需要用TRIZ理论方法加以分析设计。
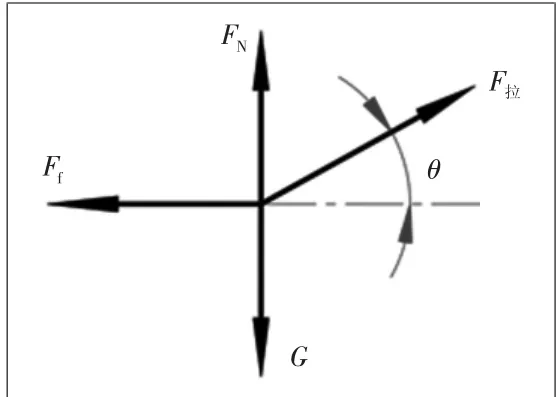
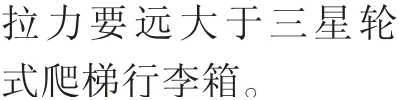
图3 行李箱受力分析

图4 行李箱所需拉力函数图

图5 三星轮式爬梯行李箱
3 TRIZ理论分析设计
3.1 爬梯技术方案比较分析
履带式爬梯行李箱的履带设计安装会占据较大的储物空间,人力拖拽行李箱所需拉力远大于三星轮式行李箱,如果采用电动机驱动,就会使得行李箱内部结构过于复杂,自重大幅度增加,给行李箱的运输放置带来不便,并进一步压缩储物空间。同时复杂的电气结构将提高行李箱制造成本,不利于行李箱的应用推广。三星轮式爬梯行李箱存在的主要问题为三星轮在进行爬梯时的攀爬半径,也就是星轮到主轴回转中心的距离是固定值,无法很好地适应不同高度的台阶,应用范围受到了一定限制。综合比较现有的两类爬梯技术方案,发现改进三星轮式爬梯的技术方案更为简单有效,且成本较低。
3.2 TRIZ原理解决方案
TRIZ理论是一种可有效解决技术问题或发明问题的创造学方法,为解决问题建立合理的模型提供一种方法论的指引,使得设计过程有据可循,少走弯路[4]。为了得到三星轮式爬梯行李箱结构设计的优化方案,采用了以下TRIZ发明原理:1)发明原理1——抽取原理。抽取原理为将物体中有用的必要因素和有害的部分抽取出来,并进行相应的处理。包括从物体中抽取出有害部分和从物体中抽取有用的必要因素。三星轮式爬梯行李箱的行星架部分相对回转轴固定不动,限制了行李箱的适用范围,为有害部分。三星轮式爬梯行李箱的星轮机构通过星轮架绕回转中心公转,星轮轮流作支点交替翻转实现攀爬楼梯的功能,为有用的必要部分。2)发明原理11——动态原理。动态原理为通过运动或柔性处理,以提高系统的适应性,将物体不动的部分变成可动的,增加其运动性[5]。对三星轮机构的行星架做动态处理,即将行星架设计为可动的。3)发明原理6——嵌套原理。嵌套原理为使得两个物体内部契合或置入,其中包含有一个物体通过另一个物体的空腔。根据嵌套原理设计一个安装壳,安装壳固定在回转主轴上,并沿周向均匀地开3个方形孔,行星架通过方形孔进入安装壳的空腔中,在安装壳中的推动机构和方形孔的作用下完成沿着安装壳径向的移动。4)发明原理8——预置防范原理。预置防范原理指事先准备,应对可能出现的故障或问题,以提高系统的可靠性。在三星轮式爬梯行李箱爬梯时,行星架会遭受一定的冲击载荷。根据预置防范原理,三星轮的安装壳内部设置有图6所示的导轨,可改善行星架的受力情况,提高爬梯过程中三星轮的稳定性。

图6 三星轮安装壳
4 爬梯式行李箱创新设计方案
4.1 爬梯式行李箱结构设计
对三星轮式爬梯行李箱结构进行创新性设计,提出一种爬梯半径可连续变化的三星轮(如图7),其内部结构如图8所示,以此为基础,设计出一种连续变径三星轮式爬梯行李箱(如图9),其中可连续变径三星轮的结构主要由行星架主轴、安装壳、盖体、星轮、行星架、蜗轮、蜗杆、调节旋钮、回转盘、转轴、连接板等组成。该三星轮的安装壳固定在行星架主轴上,并沿安装壳周向均匀分布3个行星架,其中行星架的一端安装有星轮,另一端穿过安装壳,并且通过连接板与安装壳内部的转盘相连接,转盘与驱动机构相连,驱动机构由蜗轮和蜗杆组成。

图7 可连续变径三星轮

图8 可连续变径三星轮内部结构

图9 连续变径三星轮式爬梯行李箱
通过拧动调节旋钮使得蜗杆转动从而带动蜗轮转动,然后蜗轮带动回转盘转动。回转盘通过连接板推动行星架沿安装壳径向移动,行星架在安装壳中伸缩变化,实现了三星轮的攀爬半径可在一定的数值范围内连续变化。驱动机构采用蜗轮、蜗杆,不仅结构简单而且可以自锁,可以防止爬梯过程中因冲击载荷而导致攀爬直径变化。与普通三星轮式爬梯行李箱相比,连续变径三星轮式爬梯行李箱可以通过调整行星架在安装壳中的径向移动,改变三星轮的攀爬半径,以应对不同场景的楼梯及不同高度的台阶,适用范围更广。
4.2 行李箱工作状态分析
三星轮的初始状态所对应的爬梯半径为最小爬梯半径,此时3个行星架及连接板在回转盘上的相对位置相同。连接板沿着回转盘周向均匀安装,并与行星架末端铰接,回转盘转动通过其上均匀布置的连接板同步同弧度推动行星架,从而保证了行星架的伸缩变化为同步同心。

图10 三星轮最小爬梯半径状态
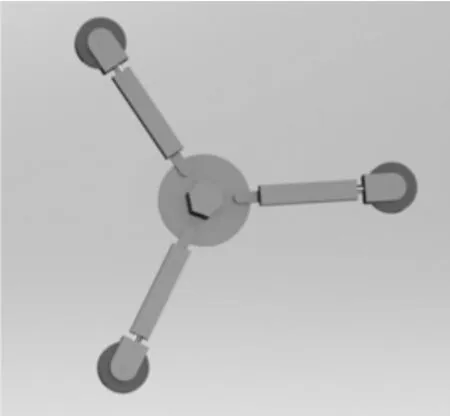
图11 三星轮最大爬梯半径状态
如图12所示,连接板的长度为a,行星架与连接板之间的夹角为θ,星轮半径为r,将回转中心到星轮中心的直线距离定义为爬梯半径。初始状态三星轮的爬梯半径即最小爬梯半径R1=L+r,三星轮的爬梯半径R的近似公式为R=L+r+acos θ;本设计中三星轮处于最小爬梯半径状态时所对应的θ角近似为90°,最大爬梯状态所对应的θ≈0°,故最大爬梯半径R2=L+r+acos 0°=L+r+a;三星架的伸缩幅度变化为ΔR=R2-R1=a,由此可见三星轮所能适应不同楼梯高度的范围与连接板的长度有关。目前的楼梯建造要求的台阶高度为140~210 mm,所对应的台阶宽度为200~320 mm。本设计的三星轮机构参数选取r=30 mm,a=60 mm,L=150 mm,最小回转半径R1=180 mm,最大回转半径R2可以达到240 mm,这可适应绝大部分不同高度的楼梯。
图12 三星轮局部结构图
5 结论
本文分析了现有的行李箱爬梯技术方案所存在的问题,综合比较履带式爬梯和三星轮式爬梯技术方案,发现三星轮式爬梯行李箱更具有改进优化的空间,并利用TRIZ理论优化改进现有的三星轮式爬梯行李箱,提出了一种可连续变径的三星轮式爬梯行李箱。本文对TRIZ创新发明原理的应用,拓展了设计师对爬梯式行李箱(多功能行李箱)的设计思路,为后续爬梯式行李箱的设计提供了理论参考。
