基于深度残差网络的智能换挡控制策略
2022-02-19卢国华
唐 杰,王 凯,卢国华
(上汽通用五菱汽车股份有限公司,广西 柳州 545000)
汽车自动变速器挡位决策系统对汽车的动力性和经济性有着至关重要的影响。传统的挡位决策系统只对汽车行驶状态产生影响,未能充分考虑驾驶员及环境因素的影响。随着汽车进一步智能化,人机交互越来越重要,因此近年来汽车自动变速器智能挡位决策系统的研究非常火热。陈清洪等[1]研究发现人工神经网络可以学习并预测车辆动态状况、道路状况及驾驶员特性的变化,提出了一种基于神经网络的三参数换挡策略;Elnashar[2]利用模糊理论和神经网络建立了汽车自动变速器挡位决策系统,并对其进行了计算机仿真;Jantos等[3]在乘用车上开发和测试了机械式自动变速器,实验结果表明,该变速器能够有效提高车辆的经济性和驾驶性能;阴晓峰等[4]基于神经网络模型提出了车辆动态性能和经济性最优的换挡策略;戴群亮等[5]提出了一种基于人工神经网络的自动变速器换挡策略;曾家谦[6]利用神经网络和贝叶斯融合决策对驾驶风格进行识别。
本文提出了一种基于深度残差网络的智能换挡控制策略。该策略首先将采集到的实车节气门开度、车速及加速度等3个参数输入自编码器进行无监督学习,得到神经网络的初始权重,然后对自编码器进行重组并添加残差连接以建立起深度残差网络,利用实车数据对深度残差网络进行监督训练,对初始权重进行微调,最终得到基于深度残差网络的智能换挡控制策略。基于实车数据,与传统人工神经网络的方法进行了对比,实验结果表明,本文提出的方法挡位识别精度更高,可以更好地理解驾驶员的换挡意图,使得人机交互体验得以提升。
1 整车模型
本文提出的基于深度残差网络的智能换挡控制策略模型示意图如图1所示。驾驶员通过加速踏板对发动机进行控制,并将加速踏板的操纵信号输入神经网络控制器。自动变速器将动力传输至车轮,同时将车速和加速度信号输入神经网络控制器,控制器对挡位进行决策并向自动变速器发出换挡信号。本文使用的整车模型和深度残差网络控制器模型均运用MATLAB/Simulink建立,深度残差网络控制器模型如图2所示。

图1 智能换挡控制策略模型
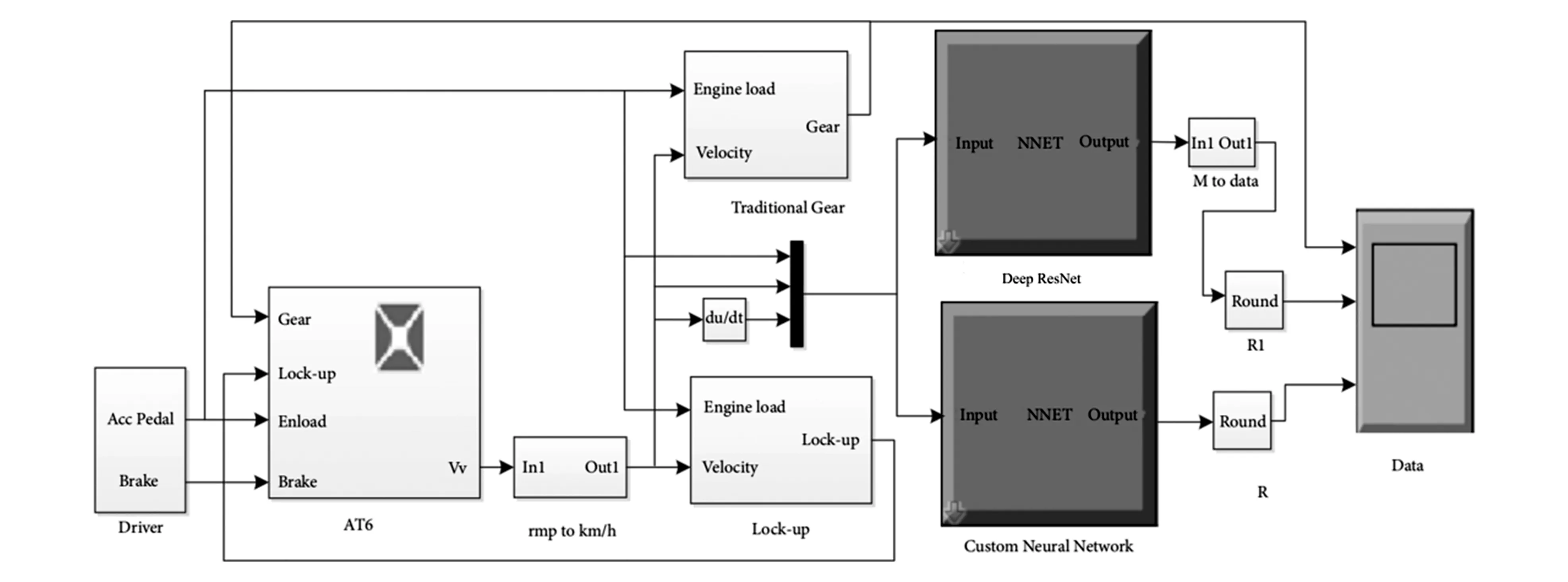
图2 深度残差网络控制器模型
2 深度残差网络模型
2.1 人工神经网络
人工神经网络是一种典型的深度学习模型,它将多个不同的函数组合在一起,可以对足够复杂的数据进行分类或拟合回归。人工神经网络结构包括输入层、隐藏层及输出层。某神经网络的隐藏层计算过程如下:
(1)
(2)
对于单个样本(x(i),y(i)),神经网络的代价函数J(W,b;x(i),y(i))如下:
(3)
神经网络的优化过程即利用反向传播算法[7]求最小代价函数的过程。
2.2 自编码器
自编码器是一种无监督预训练神经网络[8],其功能是将输入信息作为学习目标,并对输入信息进行表征学习,自编码器包括编码器和解码器。自编码器结构如图3所示。

图3 自编码器
自编码器与神经网络的代价函数不同。神经网络的优化目标是得到预测标签值,而自编码器的优化目标是得到与输入尽可能相同的预测值,因此基于神经网络代价函数得到自编码器的代价函数,如式(4)所示:
(4)

若自编码器的编码维度大于输入数据的维度,则该自编码器为过完备自编码器。过完备自编码器在训练过程中易出现对输入的简单复制而无法学习到数据有效特征的情况,从而导致自编码器训练失败,因此需要在其代价函数中加入稀疏惩罚,此时自编码的代价函数改写为:
(5)
(6)

2.3 残差网络
在深度学习领域,随着模型深度的增加,模型的容量也在增加。但是当模型的深度达到一定的程度时模型会退化,即训练误差越来越大。而残差网络通过一种残差连接(short-cut)解决了这个问题[9],并减少了模型的训练时间。short-cut是指在标准前馈神经网络的基础上加入一个跳跃连接以直接跳过某些层。标准前馈神经网络和残差网络的对比如图4所示。
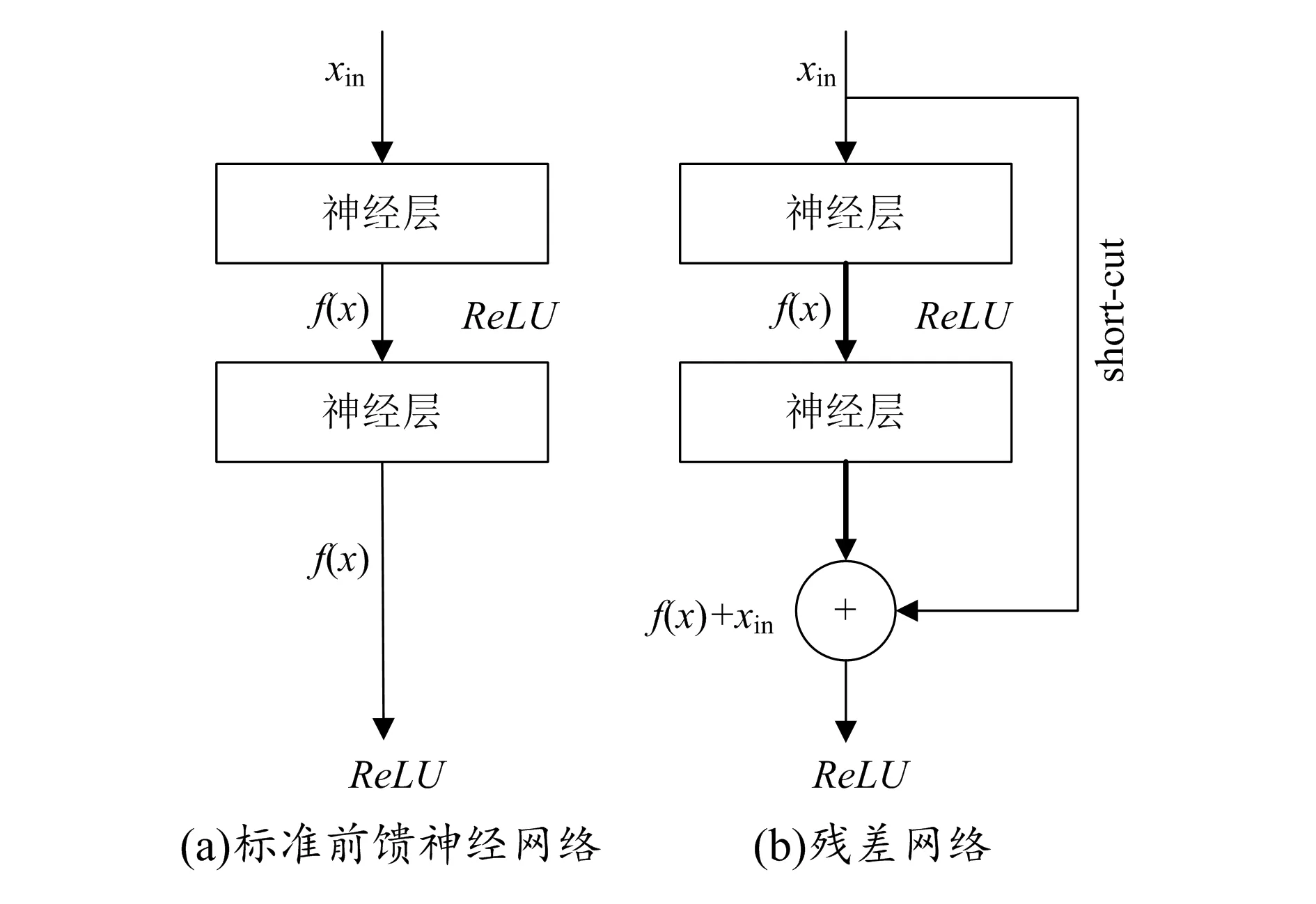
图4 标准前馈神经网络与残差网络对比
经过两层前馈神经网络预测的预测值H(x)计算过程如下:
f(x)=ReLU(b1+xin·w1)
(7)
H(x)=ReLU(b2+f(x)·w2)
(8)
式中:xin为网络的输入;w1,w2分别为第一、二层神经层的权重;b1,b2分别为第一、二层神经层的偏置;ReLU为激活函数。
而残差网络中预测值H(x)与x之间存在函数关系,假设两者之间的函数关系满足H(x)=2x,则残差网络的预测值H(x)如下:
H(x)=ReLU(b2+f(x)·w2)+xin
(9)
残差网络通过添加了一个short-cut连接,在输入与输出之间形成两个通道,同时由于short-cut连接将输入直接连接到输出,因此很好地解决了梯度消失/爆炸的问题,使得网络可训练性提高。
2.4 基于深度残差网络的智能换挡控制策略
以自编码器及残差网络为基础,建立基于深度残差网络的智能换挡控制策略模型,模型的训练流程如图5所示。
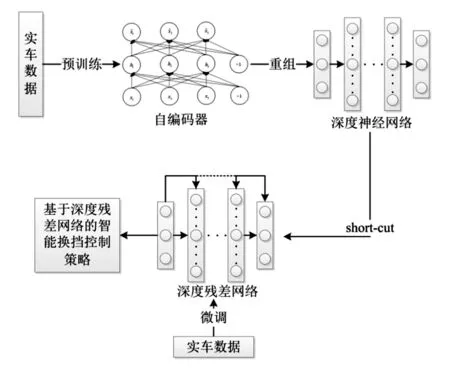
图5 基于深度残差网络的智能换挡控制策略模型训练流程
首先从实车数据中提取节气门开度、车速及加速度作为特征输入,分别进行6个自编码器的无监督预训练,每个自编码器神经元个数为10;然后重组自编码器隐藏层,构建包含6个隐藏层的神经网络,并添加short-cut连接建立深度残差网络;最后利用实车数据对深度残差网络的权重进行微调,得到基于深度残差网络的智能换挡控制策略模型。
3 仿真结果
3.1 实车数据
在自动变速器中,基本的换挡规则已在控制器中预设,车辆只能在不同的驾驶环境下根据固定的换挡控制策略来换挡,因此在实际驾驶过程中,决策的挡位并非最优。本文采集了5种路况下驾驶员在实际驾驶过程中手动换挡的相关数据,主要包括挡位、节气门开度、车速和加速度等信息,采集的实车数据量见表1。对二参数的深度残差网络进行训练时,输入特征为节气门开度和车速,标签值为挡位;对三参数的深度残差网络进行训练时,输入特征为节气门开度、车速和加速度,标签值为挡位。

表1 采集的实车数据量
3.2 智能换挡策略参数量对比
不同参数量下基于传统人工神经网络和深度残差网络的智能换挡策略对比结果分别如图6、图7所示。
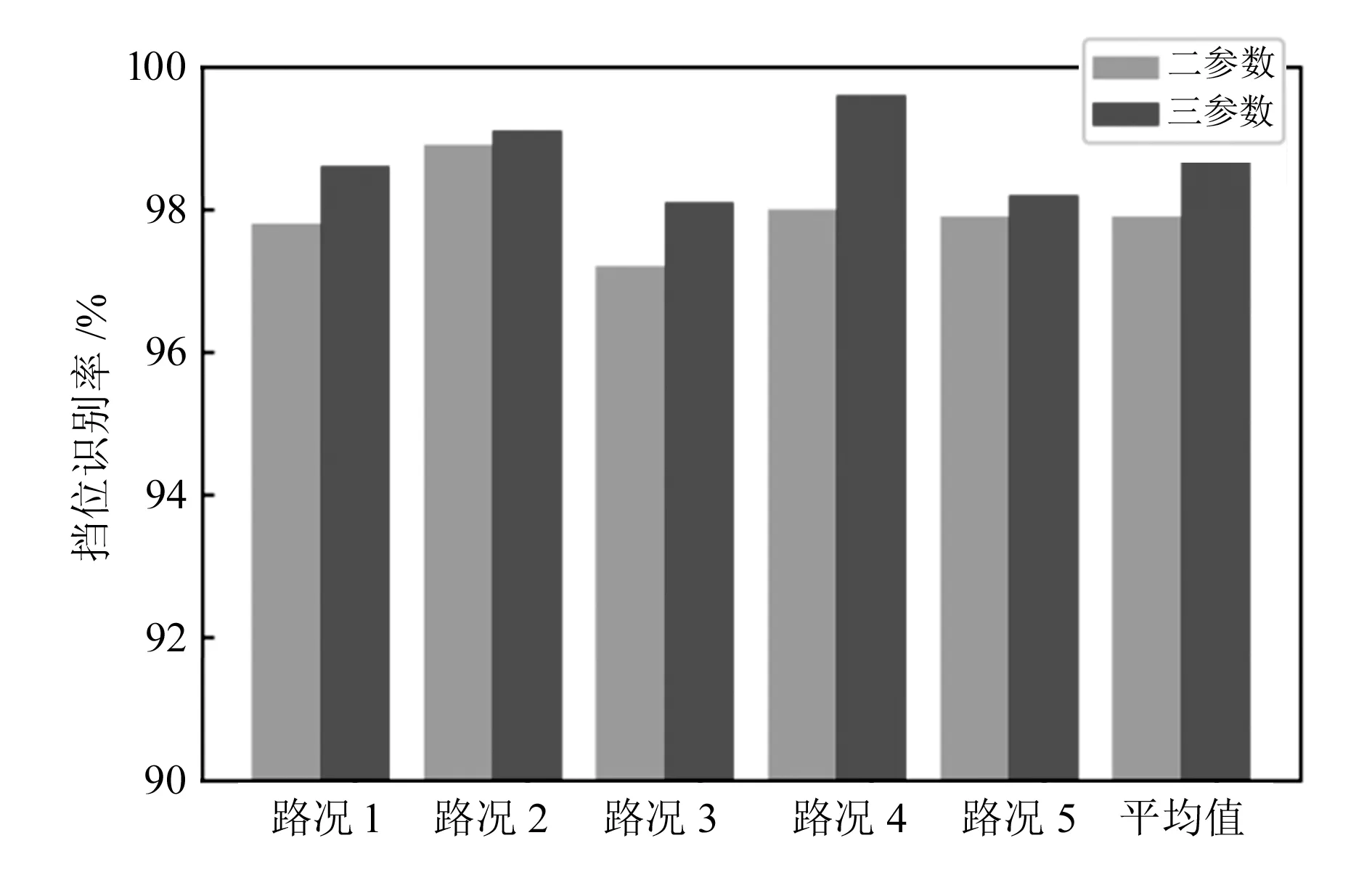
图6 基于传统人工神经网络的智能换挡策略对比结果
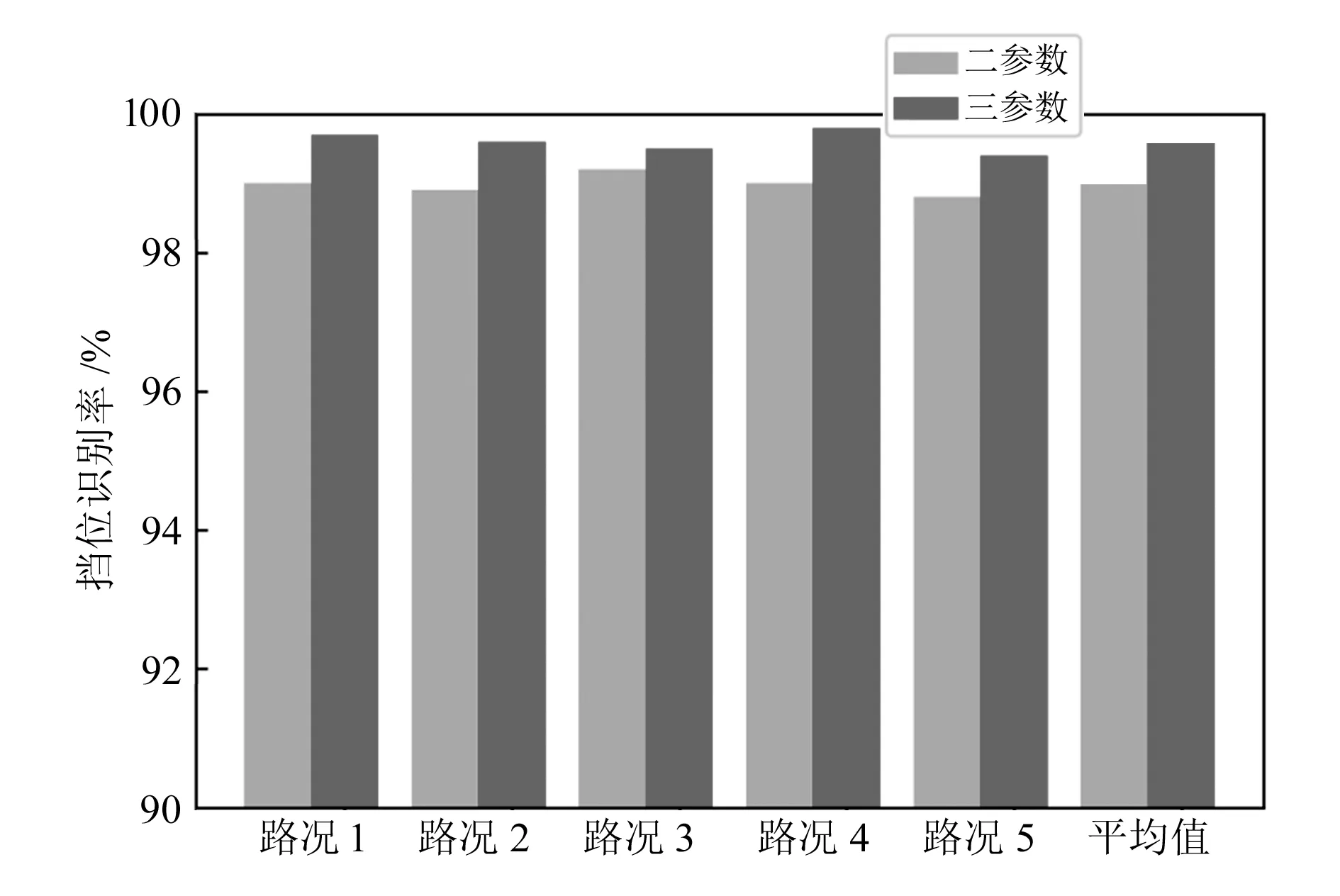
图7 基于深度残差网络的智能换挡策略对比结果
仿真结果表明,不同工况下,由于三参数换挡策略比二参数换挡策略多了一个输入特征——汽车加速度,因此三参数换挡策略包含了更多的换挡信息,相比二参数智能换挡策略的精度更高,故本文采用三参数换挡策略。
3.3 基于传统人工神经网络与深度残差网络的智能换挡策略对比
在确定了换挡策略参数量后,利用实车数据对基于传统人工神经网络与深度残差网络的智能换挡策略进行对比实验,实验结果如图8所示,由图可知,两种策略在挡位稳定时的识别率均较好,但汽车在加速及减速时基于传统人工神经网络的策略不能充分领会驾驶员的驾驶意图,升、降挡会出现延迟或提前,在换挡时甚至出现循环跳挡的情况。
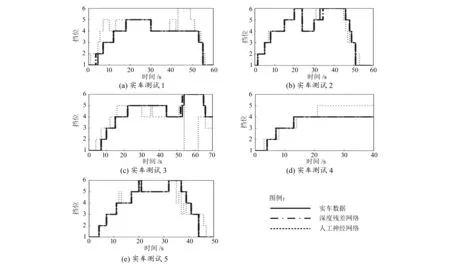
图8 智能换挡策略对比试验
挡位识别率对比见表2。由实验结果可知,在不同路况下,基于传统人工神经网络的智能换挡策略的挡位识别率均达到98%以上,平均识别率为98.6%,而基于深度残差网络的智能换挡策略挡位识别率更高,不同路况下的挡位识别率均在99%以上,平均识别率为99.4%。因此本文提出的方法可以更好地理解驾驶员换挡意图,使得人机交互体验得以提升。

表2 不同智能换挡策略挡位识别率对比 %
4 结束语
本文针对传统换挡策略中人机交互体验较差的问题,提出了基于深度残差网络的智能换挡策略。首先将采集得到的不同路况下驾驶员手动换挡数据输入自编码器进行预训练,然后将自编码器重组,并加入残差连接(short-cut),建立起深度残差网络。根据智能换挡策略参数对比实验确定了三参数换挡策略,将实车数据中节气门开度、车速及加速度作为深度残差网络的输入,挡位为标签值,对传统人工神经网络及深度残差网络进行训练及测试。实验结果表明,基于深度残差网络的智能换挡策略的挡位识别率较高,平均值为99.4%,比传统人工神经网络的挡位识别率提高了近1%,因此本文提出的方法可以更好地理解驾驶员的换挡意图,使得人机交互体验得以提升。
