基于GNSS的单波束测深系统在大中型水库水下地形测量中的应用
2022-02-18商建伟
商建伟
(山东省国土测绘院,山东 济南 250013)
0 引言
长期以来,受制于传统观念及测深技术的制约,水下地形测量较之陆域测量,存在较大的差距。陆域测量已形成完整规范的更新体系和更新周期,测量手段成熟多样,数据成果较为完善,而水下测量仍处于填补空白阶段。随着水库在调蓄洪水、灌溉、养殖、旅游等方面发挥的作用日益明显,为更好地开发利用丰富的内陆水库水下地理信息资源,对水库水下地形进行测量,显得非常必要。目前常用的水下测量技术有单波束测量和多波束测量,都属于回声探测技术。单波束测量最早出现于20世纪20年代,通过向水下发射声波,获取一系列连续的水下点,这种技术极大地提高了作业效率,早期受定位技术的制约,发展较为缓慢。在20世纪70年代,人们发明了多波束测量技术,该方法可以一次性获取垂直于航线的水深条带,相比单波束测量,其特点是效率更高,精度更高,可以绘制更加精细的水下地貌[1]。单波束测量系统目前国内外技术均较为成熟,国内的海鹰测深系统、中海达测深系统、南方测深系统均已在诸多测深项目中成功使用,多波束测深系统由于技术更为复杂,在我国开展相关研究起步较晚,仍处于追赶国外的阶段。随着GNSS的快速发展,其差分定位精度已达到厘米级[2-3],且具有了全天候、实时获取的特点,GNSS发展促进了回声测量技术的发展,当前单波束测量与多波束测量已与GNSS高度融合,且随着人工智能技术、通讯技术、系统集成技术的飞速发展,无人测量船也已在水下测量领域大量应用,为不同水域测深提供了更为多样的选择[4]。
1 研究区概况
东平湖水库位于山东省东平县,总面积约627km2,常年水面约124.3km2,平均水深约2.5m,蓄水总量约40亿m3,具有重要的防洪、排灌、养殖、旅游开发价值,是黄河中下游最大的湖泊、京杭大运河复航和国家南水北调东线的重要枢纽,也是山东省西水东送的重要水源地。东平湖水库多年平均水温约14.0℃,水温平均最高值在7月,约27.2℃,最低值在1月,约1.3℃。大汶河是其主要的注入河流,经调蓄后经东平湖水库流入黄河。在大汶河入东平湖水库库口及库区东侧、北侧有水草区、养殖区和施工区,测量船不能驶入,水库内大汶河河道较窄,存在芦苇区和渔网,测量船不能驶入,其他区域均适合布设测线进行测量。本文结合山东省大型水库1∶2000水下地形测量项目,选取东平湖水库,从单波束测深技术方法、实际案例等方面开展分析研究。
2 研究方法
2.1 技术方法研究
水下地形测量指利用测绘手段,获取水下点定位、水深及高程信息,进一步绘制地形图或数字高程模型的工作。传统水库测深方法有采用测深杆或测深锤测深[5],这种方法适用于较浅的小区域测深,作业效率低下。测深仪搭载GNSS进行测量的方法是通过GNSS接收机实时获取定位及高程信息[6],测深仪换能器向水底发出频率为1500Hz的超声波,通过传播速度及往返时间计算水深[7]。SDCORS已实现全省覆盖,网络RTK定位精度优于5cm,满足项目定位要求。山东省在2016年完成全省似大地水准面精化工作,似大地水准面模型覆盖全省陆域,并外扩20km,模型分辨率2.5′×2.5′,全省总体精度优于±4cm,满足本项目高程起算需求。测深仪搭载GNSS的测量方法实现了自动定位与测深一体化,作业效率大幅提升,在大中型水库水下测量中具有较大优势,现在已广泛应用。采用这种方法,水底高程可以通过公式(1)获取,水深可以通过公式(2)获取。其中H为水底高程,HS为水深,HG为GNSS接收机高程值,H1为GNSS接收机至水面的距离,H2为测深仪换能器至水面的距离,H3为测深仪换能器至水底的距离(图1)[8-10]。
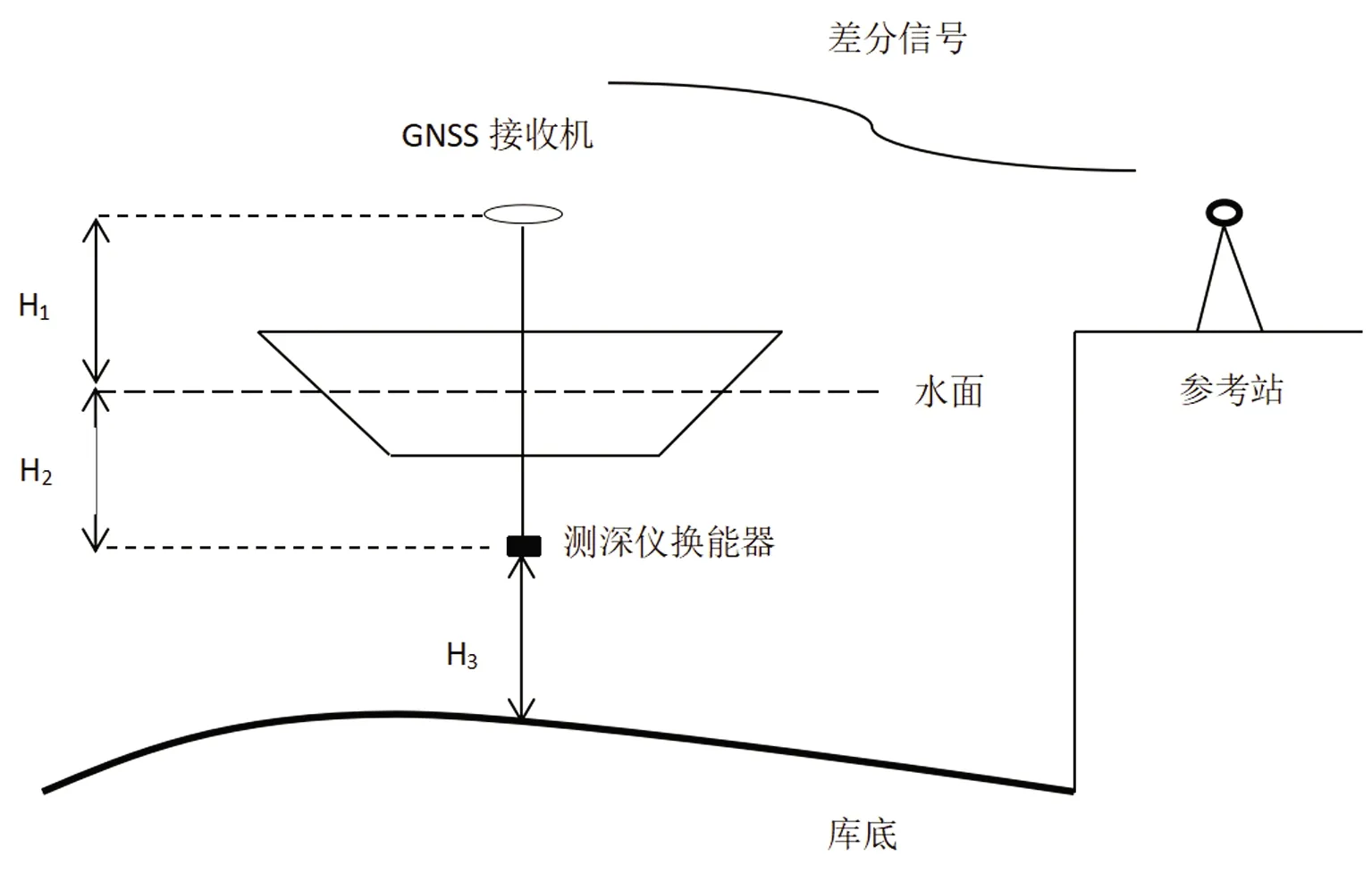
图1 基于GNSS的单波束测深原理图
H=HG-H1-H2-H3
(1)
HS=H2+H3
(2)
基于GNSS的单波束测深系统在作业时还受以下因素的影响:
(1)基于SDCORS的定位模式的影响。基于GNSS的单波束水下地形测量需依靠GNSS提供精确的平面和垂直坐标,因此在导航定位时,应确保GNSS-RTK获取数据的状态是“固定解”。
(2)GNSS数据时延造成的影响[11]。由于GNSS信号被接收机接收存在一定的时延,造成瞬时获取的三维坐标信息滞后于测深数据,应对延时进行精确测定并进行改正,实现定位与测深同步。
(3)受船体姿态的影响。受风浪等因素影响,船载测深仪并非垂直发射声波,实际测得的水深是换能器到水底的倾斜距离。若要获得更为精确的位置,还需采集船体动态的姿态参数,并对原始数据进行补偿修正,消除船体姿态对测深结果的影响。
2.2 作业流程研究
依据收集的岸线资料及概略水下地形资料布设测线,利用声速剖面仪、水文资料等确定声速,按规范安装经检校合格的定位及测深仪器,利用SDCORS获取精确的三维坐标,结合最新似大地水准面精化模型获取正常高,采用单波束测深仪进行测深,经内业数据处理及质量检验后,形成水下地形测量成果(图2)。
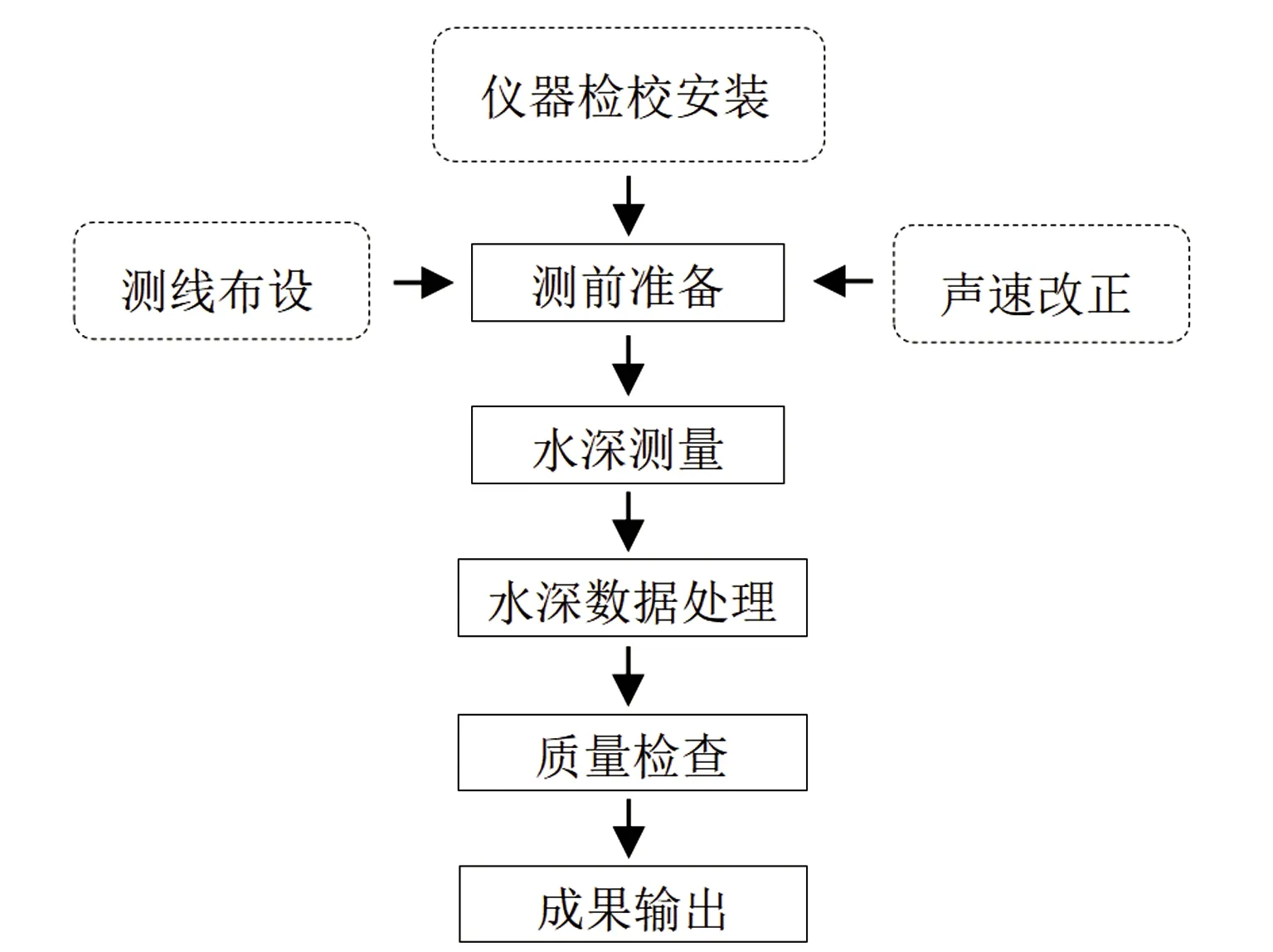
图2 水下地形测量流程图
2.3 定位及测深仪器性能研究
定位及测深仪器的稳定性及获取数据的精确性对测量结果有着重要影响,应对GNSS接收机进行平面及高程精度检核,对测深仪稳定性及一致性进行精度检核。结合研究区特点及技术要求,投入的设备见表1。
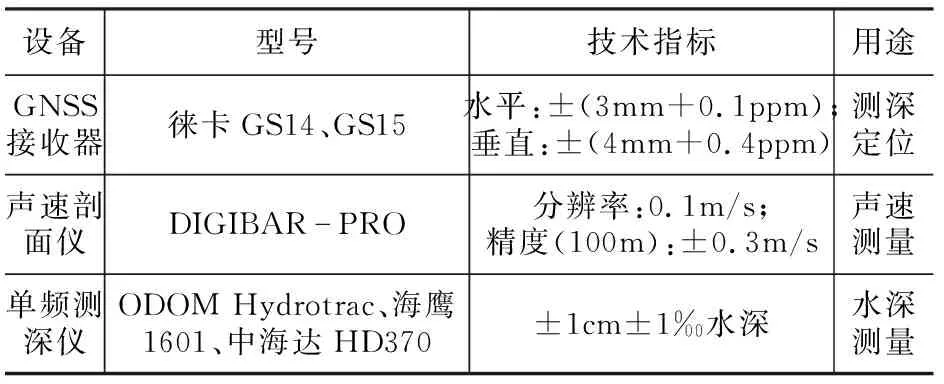
表1 项目投入的主要硬件清单
在本项目中,主要采用以下方法对设备进行检核:基于SDCORS[12],对GNSS RTK进行准确度及稳定性测试,在测区周边已知控制点上,连续采集4小时以上,采集数据真值的差值平面中误差小于3cm,高程中误差小于5cm,设备定位精度可靠,满足规范要求。在一水底平整、水深相等的位置,利用多台测深仪测深,统计测量差值,检查测深仪停泊一致性。利用测深仪,固定时间间隔连续采集水深数据,统计水深值的离散情况,检查测深仪稳定性。测深仪一致性测试差值1.4cm,稳定性测试采集了80个深度数据,中误差1.5cm,满足规范要求。为减少测深过程中船速对吃水影响,将测深仪换能器安装在船舶中舷处;为减少定位与测深偏心的影响,将GNSS接收机定位中心与测深仪换能器安置在同一铅垂线上,通过钢管与船连为一体。
2.4 测线布设
单波束测深主要通过主测线与检查线相结合的方式开展,精度评定主要通过主测线与检查线相交处的高程值符合性来判定,因此测线布设极其重要。主测线布设基本垂直于等深线的总体方向,尽量布设为平行测线,主测深线间隔为图上1cm。检查线的方向应尽量与主测线垂直,分布均匀,能普遍检查主测深线。单波束检查线总长度不小于主测线总长度的5%[13]。结合东平湖水库岸线和水下地形特点,布设测线总长度约为8737.28km,其中主测线长度约为7945.34km,检查线长度约为791.94km。测线布设的示意图见图3。
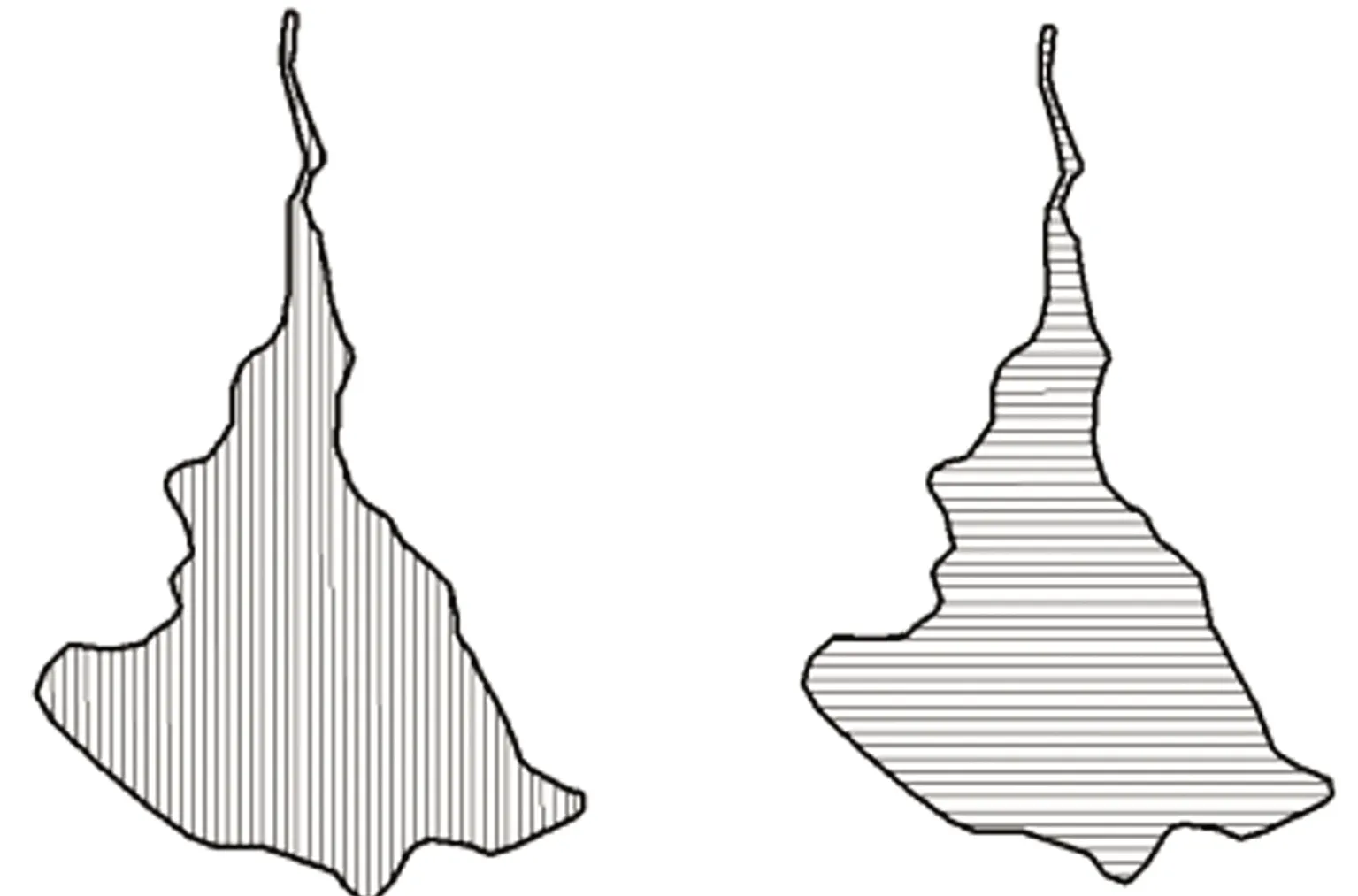
图3 主测/检查线布设示意图
2.5 声速改正
水温、盐度、深度都对声速产生影响,声速直接影响水深的精度,声速改正非常必要。测深开始前,利用声速剖面仪器测定声速,采样分层间距设置为1m,取平均声速作为初始声速,用于声速改正。本研究测得东平湖水库平均声速1498m/s。
2.6 水深测量
测量船工作时吃水对水深数据产生一定的误差,作业前应对测量船进行静态、动态吃水改正。利用钢尺直接量取换能器探头至水面的距离,获取静态吃水值;在水底平坦、坚硬区域,利用测深仪分别以静态和动态的方式测定水深,求取两者的差值,获取测量船在换能器位置的下沉值,该值加上静态吃水,得到测量船在某一航速下的动态吃水值。测试发现,测量船在3节、6节航速时,吃水改正值平均为1cm和3cm。在本研究中,按照规划的测线,基于SDCORS,采用GNSS RTK方式进行测深导航。测深时,测深采样频率设置为1Hz,船速保持在6节以下,按等距方式实时采集定位及深度数据。
2.7 数据处理
对测深数据进行处理主要指经编辑、粗差剔出、水深数据选取后,形成正式测深成果。对平面定位偏差较大的,结合航线及测量时刻,对其进行剔除或修正;结合测深仪电子模拟图像,逐测线对水深数据进行校对,对水深粗差点进行剔除或修正,对波浪部分作平滑处理,选取水深数据时,一般设置20m间隔提取,同时兼顾复杂地貌水深特征点的选取,将GNSS接收机获取的高程数据及测深仪获取的深度数据继续融合,得到水下高程数据[14],利用似大地水准面模型求取高程异常,将测深高程由大地高转换为正常高。本研究采用HYPACK和Haida软件进行水深数据编辑选取。
2.8 研究成果
利用水下高程点数据,生成数字高程模型。本研究为1∶2000比例尺,格网间距为2m,数字高程模型成果见图4。
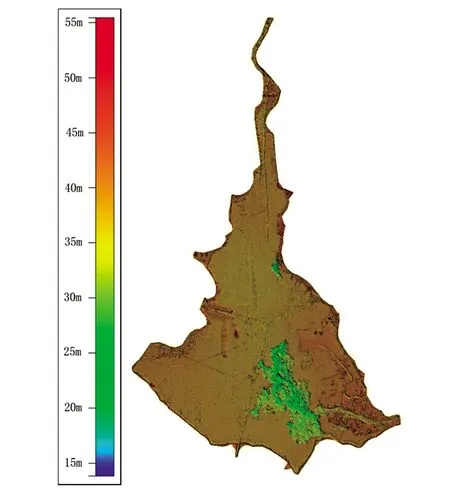
图4 数字高程模型成果
2.9 质量检查
水下地形测量质量检查主要包括对主测线、检测线的布设情况进行检查以及对水下高程点高程值精度进行检查。东平湖水库水下地形测量项目实测主测线7729.9km,实测检查线465.1km,检查线总长占主测线总长的6.0%,满足规范要求。在平坦地区取实地0.5m以内的2个水下高程点做比较,在深度变化剧烈或没有重合点的地方,参考其变化规律,从原始数据中提取加密点,加以分析。东平湖水库水深在20m以下,重合点不符值中误差10m以内为0.15m,10~20m为0.2m,大于2倍中误差的差值不参与计算。对主测线与检查线76582个重合水下高程点进行计算[15],10m以内中误差为0.14m,10~20m中误差为0.17m[16-17]。差值统计见表2。

表2 主测线与检查线重合水下高程点差值统计表
3 结论
本文结合东平湖水库水下地形测量项目,研究了基于GNSS的单波束测深系统在大中型水库水下地形测量中的应用。东平湖水库水文情况复杂,存在部分浅水区、水草地、养殖区及滩涂区,测量船不易进入。浅水区尽量趁高水位采用吃水较小的测量船施测,难以抵达的区域,适当调整测深线间距,增大测点间距离;测量船确实不易进入的区域,采用人工涉水,测深杆配合定位设备的方式施测;对于测量人员无法登陆的复杂滩涂区域,采用航空摄影测量方法施测[18-19]。研究表明,该系统对载体要求不高,适用性强,自动化程度高,能大幅提高作业效率。系统集定位与测深于一体,能快速获取水下高程信息,成果精度高,是一种有效的大中型水库水下地形测量解决方案。
