安全距离-时间模型的汽车紧急制动分层控制策略研究
2022-02-18敖宏伟陈学文荣同康
敖宏伟,陈学文,荣同康
(辽宁工业大学 汽车与交通工程学院, 辽宁 锦州 121001)
汽车紧急制动系统作为高级辅助驾驶系统的一部分,可以在追尾事故发生前主动对车辆进行制动,降低车辆追尾事故发生的概率[1-4]。据E-NCAP的研究数据,自动紧急制动系统可以避免27%追尾事故的发生,未来AEB系统将在人们行车安全中扮演更加重要的角色。
国内外研究机构与科研人员对汽车紧急制动系统控制策略及产品开发进行了广泛研究。Baldovino等[5]利用模糊脉宽调制技术开发了一款智能AEB控制算法,引入微型模糊关联矩阵(FAM)表算法来减少计算规则的数量。Rosado等[6]在研究自动紧急制动系统时引入“主动安全裕度”的概念,提出了一种能够预测碰撞速度、停止距离和停止时间的AEB分析模型。Ioana等[7]在不同附着系数的路面上对自适应AEB系统与传统AEB系统进行实验,实验结果表明:带有自适应AEB系统的车辆可以更好地避免交通事故的发生。别克公司推出的智慧行车科技系统,可以对本车道内的前方目标车辆进行实时监测并预警,当驾驶员未采取制动措施时,采取紧急制动减轻或避免碰撞事故带来的危害。
李霖等[8]对驾驶员在危险工况下的制动行为特征进行提取,分析了制动过程中本车的平均制动减速度以及制动开始时刻的TTC值,并以此搭建了危险目标估计模型,设计了分级预警/制动模型。吴飞[9]利用综合加权法建立了碰撞预警的安全距离辨识模型,基于分层控制思想搭建了上层控制器,降低了误报警率。
目前国内外车企对于AEB系统采用的常用模型为安全距离模型、安全时间模型,现有的控制策略难以应对实际车辆行驶过程中复杂多变的交通环境,在前方危险目标的选取、危险状态判断、制动介入时刻、制动力大小的选取等方面仍有较大的改善空间。
本文考虑了相邻车道前方车辆换道工况,对前方危险状态判断与目标确定、制动介入时刻与制动强度的选取等关键问题进行深入研究,设计了危险目标模糊判别控制器,将安全距离模型与安全时间模型相结合,建立了自动紧急制动分级制动策略,实现了危险目标判别、预警/分级制动与避撞等功能,提升现有AEB系统的可靠性。
1 汽车紧急制动分层控制总体策略
图1为汽车紧急制动系统功能逻辑框图,以分层式控制思想为基础架构搭建AEB控制系统,包括功能定义层、上层控制器、下层控制器及本车控制执行器,行程闭环反馈控制系统。

图1 汽车AEB系统功能逻辑框图
控制功能定义层依据当前工况下的车辆信息,决定控制模式的选择以及切换。当预警信号发出后,若驾驶员未采取制动措施,则系统将执行模块切换至节气门开度控制模式,此时驾驶员若未采取制动措施,并且系统判定有碰撞风险,则系统自动切换至制动压力控制模式,及时进行紧急制动,避免车辆发生碰撞。
汽车紧急制动系统的上层控制器根据信息采集模块采集到的本车与前车的车速、相对距离、节气门开度、发动机转速等信息,输出本车期望加速度。
由于上层控制器计算得到的本车期望加速度无法直接作用于本车,并且搭建的汽车动力学模型存在误差以及外界条件的干扰,因此,需要下层控制器将期望加速度转化为控制加速度作用于本车。再经由反馈将车辆的实时信息传送进控制模块,进入下一轮信息处理,形成闭环控制(如图2所示)。
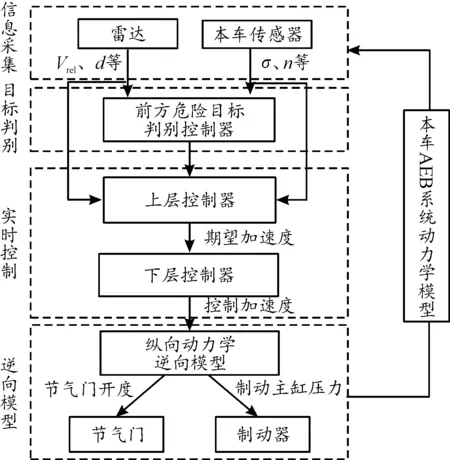
图2 汽车AEB系统总体设计框图
2 汽车紧急制动分层控制器设计
2.1 危险目标模糊判别控制器设计
危险目标判别控制器包含前方车辆换道判断模块、前方危险目标判断模块。
2.1.1前方车辆换道判断模块
相邻车道前方车辆换道判断模块控制器基于模糊控制理论搭建,输入为本车和前方目标车辆的侧向相对速度v、侧向相对距离d,输出目标车辆换道进入本车道的概率p。
1) 模糊化。本文在研究过程中考虑到本车与目标车在实际行驶过程中侧向相对速度、侧向相对距离以及目标车换道概率的变化范围,采取5个模糊子集(NL,NM,ZE,PM,PL)对控制器的输入、输出进行描述。
2) 确定隶属度函数。选取三角形和梯形隶属度函数[3,10]。设定侧向相距离d隶属度函数区间[-2,2.5] m(如图3所示),侧向相对速度隶属度函数区间[0,1] m/s,切入本车道概率p隶属度函数区间[0.2,0.8]。
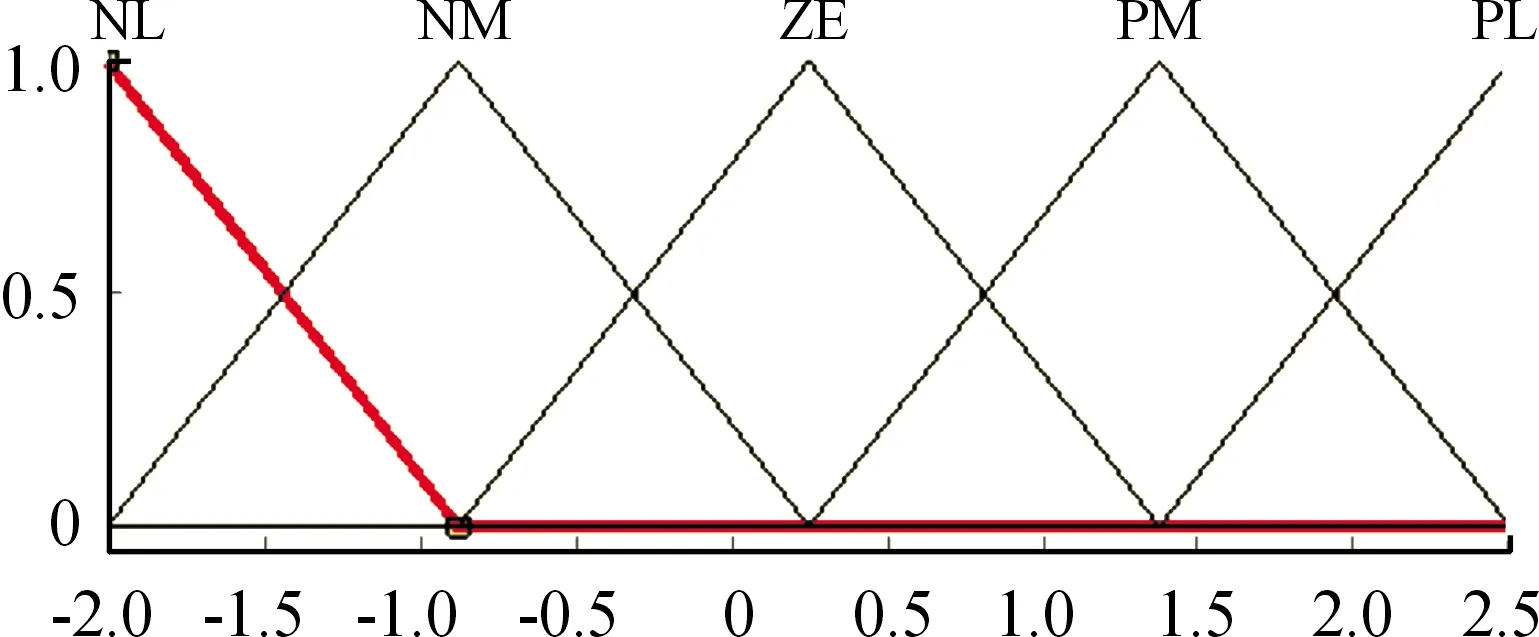
图3 侧向相对距离d隶属度函数
3) 建立模糊规则库。本文依据车辆在实际路况中的行驶规律和驾驶员的驾驶经验,建立25条模糊控制规则,如表1所示。
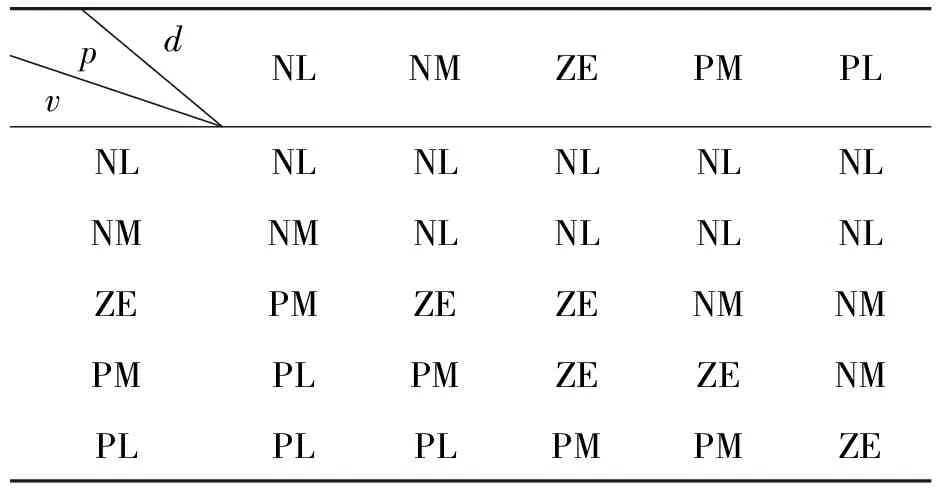
表1 模糊控制规则
4) 模糊推理与解模糊化。采用Mamdani模糊推理法对模糊集合进行推理[11-12],由于重心法能使系统输出更为平滑,所以本文选用重心法对输出量进行模糊判决,获得目标车切入本车道的概率。
2.1.2前方危险目标判断模块
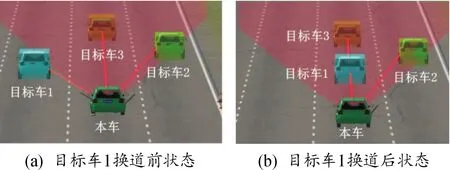
目标车与本车的相对位置如图4所示,所有车辆处于同向各直行车道内,假设本车前进方向为x轴正方向,本车左向为y轴正方向。目标车1相对于本车车头的纵向距离与车身的横向距离分别为drx和dry,则危险目标判断控制器判断逻辑如下。
1) 当本车道前方有目标车辆时,系统优先将本车道前方的目标车辆(目标车3)设定为危险目标;
2) 在情况1)的基础上,当相邻车道内出现目标车辆(目标车1和目标车2),系统首先将所有目标车辆的纵向距离(x1、x2、x3)进行比较:
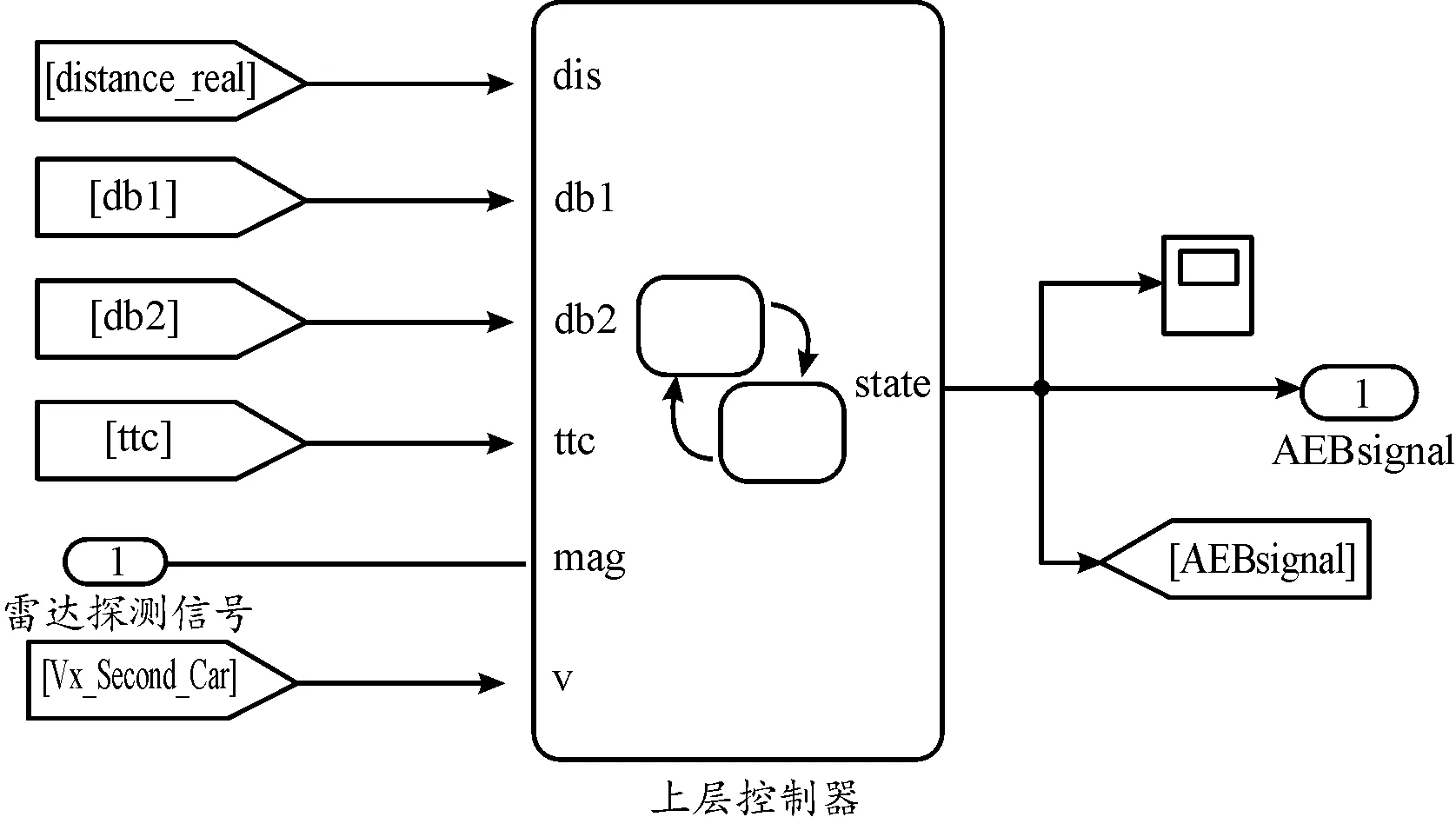
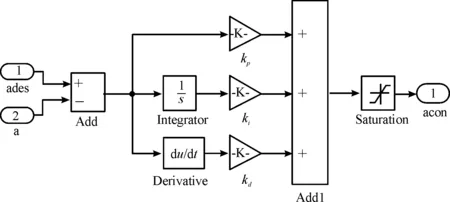
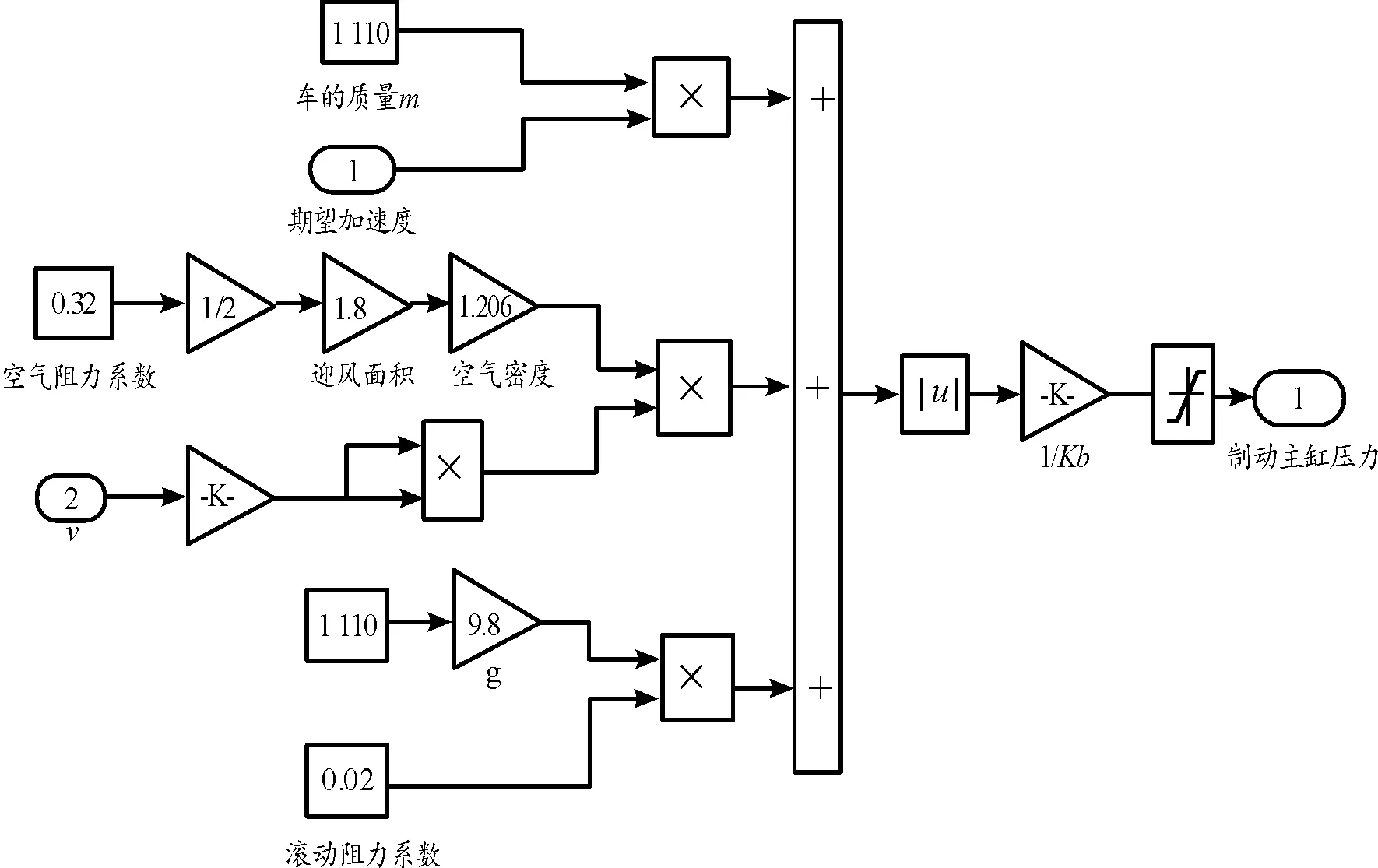
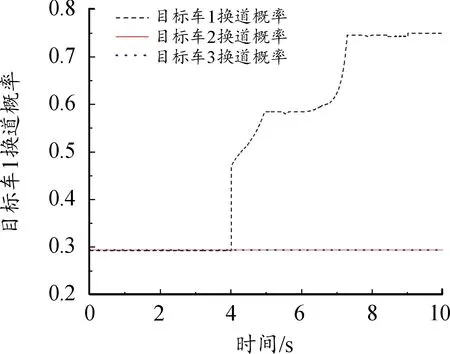
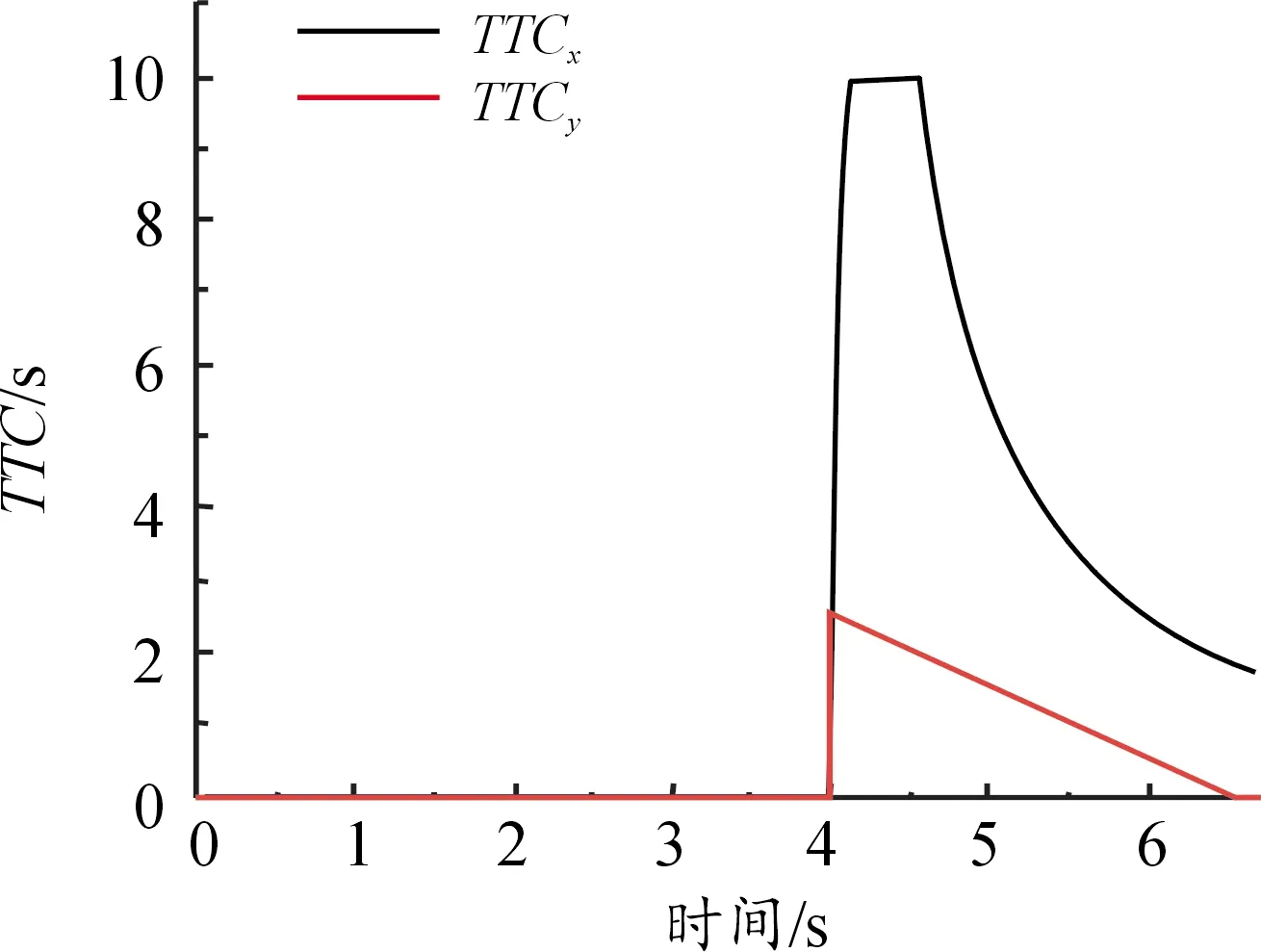
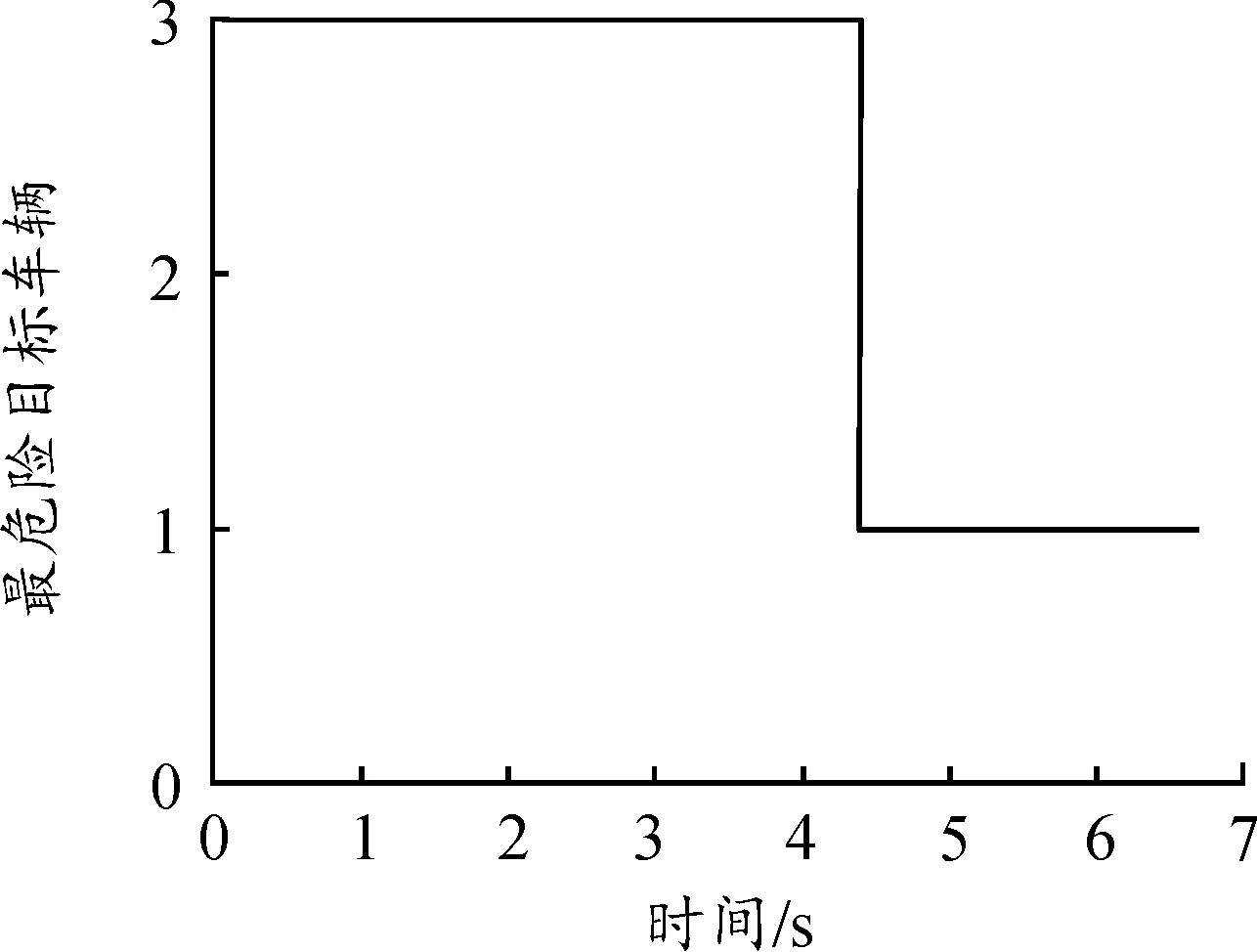
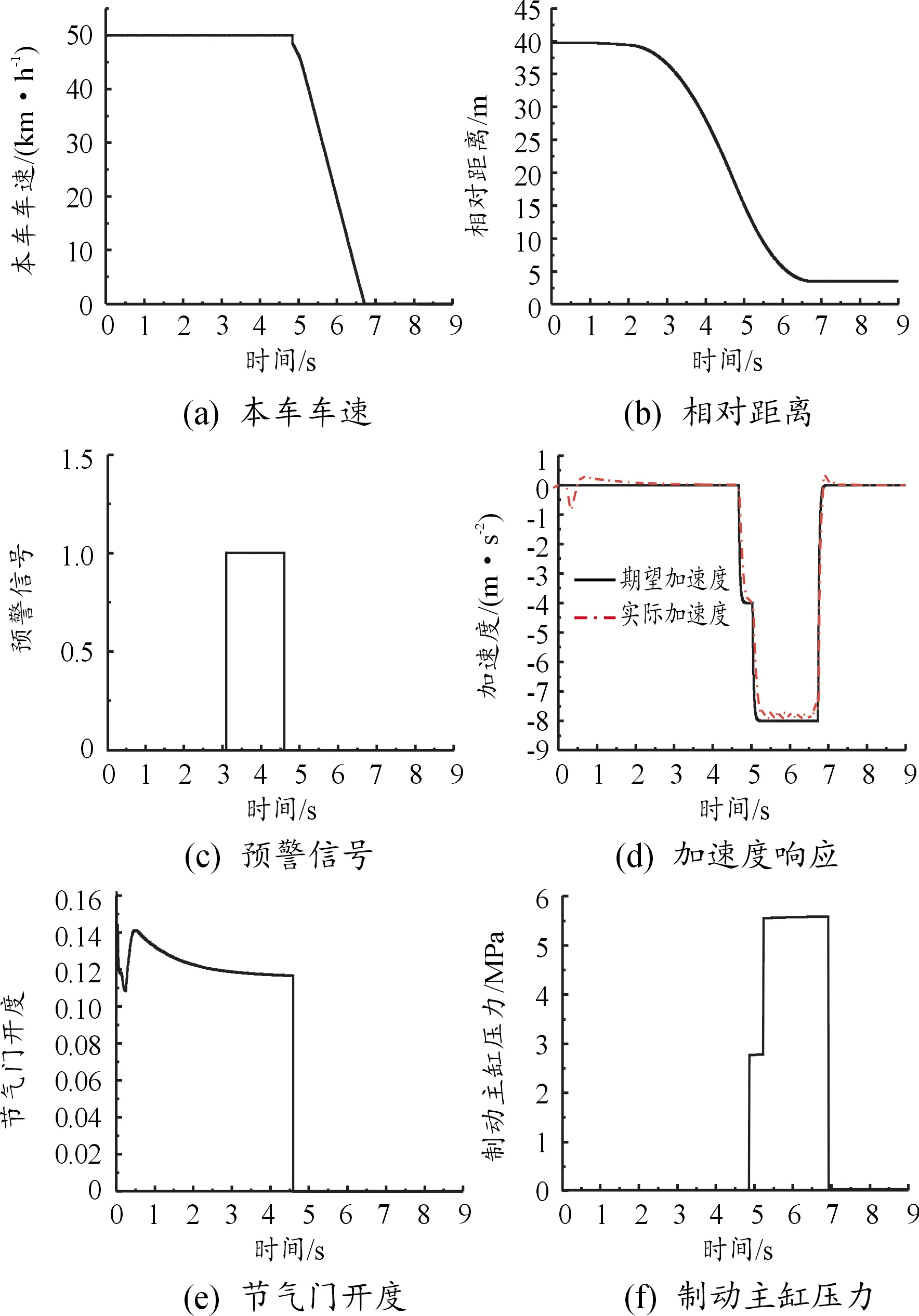
① 若x3 ② 若x2 ③ 若x3>x1且x3>x2,首先比较目标车1和目标车2的换道概率,选取换道概率大的目标作为危险车辆的“待选目标”,然后基于安全时间模型计算出目标车3的纵向碰撞时间TTCx与“待选目标”的横向碰撞时间TTCy,TTC较小的目标即为危险目标车辆。 图4 目标车与本车相对位置示意图 在y方向上,本车与目标车1发生碰撞的条件如式(1)所示。 dry+vry×TTCy≤0 (1) 同理,可以类似得到右侧车道车辆换道进入本车道发生碰撞的条件。 TTC的总体计算如式(2)所示。 (2) 式中:dr表示前后两车间的相对距离;vr表示两车间的相对速度。 利用Matlab中Stateflow模块将本车安全行驶状态、预警状态及分级制动状态间的切换逻辑进行状态流搭建,实现上层控制器中本车状态逻辑的判断,最终输出本车的期望加速度。图5为基于有限状态机理论的上层控制器模型,模型的输入变量为:前后车相对距离、一级制动距离db1(该距离为制动过程中两辆车行驶的总路程之差与两车间的最小安全距离之和,其中包含了驾驶员反应时间内本车的行驶距离)、二级制动距离db2、碰撞时间TTC、雷达探测信号、本车车速。输出变量为:AEB系统响应状态,其中“0”代表安全状态,AEB系统不干预驾驶员驾驶车辆;“1”代表预警状态,AEB系统以声音和灯光提醒驾驶员有碰撞的危险;“2”代表一级制动状态,上层控制器输出-4 m/s2的期望加速度;“3”代表二级制动状态,上层控制器输出-8 m/s2的期望加速度。 图5 基于有限状态机理论的上层控制器模型框图 上层控制器能够根据本车与前方危险目标车的相对距离、相对速度以及相对加速度计算出碰撞时间,当碰撞时间达到预警阈值时,系统对驾驶员进行预警;当本车与前方危险目标车的相对距离不断缩小至由安全距离模型规划出的一级制动距离db1时,上层控制器输出-4 m/s2的期望加速度;当相对距离进一步缩小至二级制动距离db2时,上层控制器输出-8 m/s2的期望加速度。 本文采用的一级制动距离db1和二级制动距离db2分别如式(3)和式(4)所示。 (3) (4) 式(3)与式(4)中,db1为一级制动距离;d0为两车的最小安全距离;amax为两车所能获得的最大减速度;Th为驾驶员反应时间;Ts为系统延迟时间。 基于PID控制理论,构建了汽车紧急制动系统下层控制器(如图6所示)。通过调整本车实际加速度与上层控制器得到的期望加速度偏差,得到本车控制加速度。 图6 汽车紧急制动系统下层PID控制器框图 上层控制器根据前方危险目标规划出的本车期望加速度无法直接作用于本车。本车的速度只能通过调节发动机节气门开度或制动器制动压力实现控制。因此,需要建立车辆纵向动力学逆向模型(因篇幅所限,该理论模型可参见本课题组前期研究工作[13]),将期望加速度转化成制动器制动压力或者节气门开度作用于本车,使车辆紧急制动。 本文基于CarSim构建了车辆纵向动力学模型(包含了动力学的逆向模型),如图7所示,并在Matlab/Simulink中搭建节气门/制动压力控制分配逻辑仿真模块(如图8所示)。 图7 基于CarSim构建的车辆纵向动力学模型框图 图8 期望制动压力控制分配逻辑仿真模块框图 基于CarSim构建了车辆纵向动力学模型,其主要结构参数如表2所示。 表2 车辆动力学模型主要参数 CarSim仿真工况设定:车道宽度4 m,以20 m/s匀速行驶;目标车1位于左侧车道中线,距本车前方30 m处,以20 m/s匀速行驶,4 s时以0.9 m/s横向速度切入本车道;目标车2位于右侧车道中线,距本车前方50 m处,以20 m/s匀速行驶;目标车3位于本车正前方80 m处,以20 m/s匀速行驶,4 s时,以-4 m/s2的纵向加速度进行制动,仿真过程中车辆位置如图9所示。 图9 危险目标判别仿真工况示意图 基于上述的仿真工况,通过本文设计的前方车辆换道判断模块控制器得到了各目标车的换道概率,其仿真结果如图10所示。 从图10可以看出,目标车1达到换道概率0.51的时刻为4.3 s,因而系统判定目标车1在4.3 s时发生了换道行为,因此,目标车1为潜在的危险目标。 图10 目标车换道仿真结果 当系统判定相邻车道前方车辆将会进行换道时,会根据本车道内前方车辆以及换道车辆的相对速度、相对距离等信息,通过安全时间模型计算出碰撞时间TTCx、TTCy并进行比较,最终判断出危险目标。危险目标判别控制器输出了本车与目标车1与目标车3的碰撞时间,如图11所示。 图11 本车与目标车碰撞时间 从图11可以看出,在仿真时间4 s时,由于目标车1开始向本车道靠近,目标车3开始制动,导致目标车1与目标车3的TTC值产生阶跃信号。目标车1在t=4 s时的TTCy=2.7 s,此后TTCy值以固定斜率逐渐降低;同时,目标车3以4 m/s2的加速度做匀减速运动,在之后的较短时间内,由于本车与目标车3的相对速度较小,导致碰撞时间TTCx的值很大(TTCx最大值限定在10s)。从图11可以进一步得知,目标车1的碰撞时间TTCy始终小于目标车3的碰撞时间TTCx,因此,当0 s 前方危险目标判断模块控制器输出危险目标如图12所示。其中,纵向刻度“1”“2”“3”分别代表目标车1、目标车2及目标车3。仿真时间0~4.3 s控制器默认本车道内前方目标车3为危险目标,在仿真时刻4.3 s,由于目标车1被判为换道目标且与本车的侧向碰撞时间小于目标车3的纵向碰撞时间。因此,控制器在4.3 s后判断目标车1为危险目标,控制器判别结果与预期一致。 图12 危险目标判断仿真结果 基于C-NCAP典型测试工况,围绕本车接近前方静止车辆(CCRs)、本车接近前方低速车辆(CCRm)及本车接近前方紧急制动车辆(CCRb)等不同车速条件下验证了本文策略的合理性。由于篇幅所限,本文重点给出了CCRs工况下本车以50 km/h的初速度接近前方100 m处静止车辆的仿真结果以及CCRb工况下本车初速度为50 km/h接近前方40 m处紧急制动车辆的仿真结果。 3.2.1CCRs工况下接近静止车辆的仿真结果 本车以50 km/h的初速度接近前方100 m处静止车辆,两车最小安全距离d0设置为3 m,仿真步长为0.001 s。仿真结果如图13所示。 从图13可以看出,预警模块在仿真时间t=4.2 s时进入一级预警状态。当t=5.7 s时,自动紧急制动系统控制本车进入一级制动状态,期望加速度由0变为-4 m/s2,输出的制动主缸压力由0升至2.7 MPa,节气门开度降为0,本车开始进行匀减速直线运动;当t=6.2 s时,自动紧急制动系统控制本车进入二级制动状态,期望加速度降至-8 m/s2,控制器将制动主缸压力调整为5.4 MPa,本车实际加速度在期望加速度周围上下小范围波动;在t=7.8 s时,本车刹停且与前车的相对距离为3.2 m。这说明本文提出的控制策略可以较好地实现CCRs工况下预警/分级制动功能。 图13 接近前方静止车辆(CCRs)仿真结果 3.2.2CCRb工况下接近紧急制动车辆的仿真结果 本车行驶速度为50 km/h,正前方40 m处的前车速度为50 km/h,突然以-4 m/s2加速度进行减速行驶直至停止。两车最小安全距离d0设置为3 m,仿真步长为0.001 s。仿真结果如图14所示。 从图14可以看出,预警模块在仿真时间t=3.1 s时进入一级预警状态,当自动紧急制动系统采取一级制动时,预警解除。当t=4.6 s时,自动紧急制动系统控制本车进入一级制动状态,自动紧急制动系统开始进行一级制动,输出的期望加速度为-4 m/s2,制动主缸压力为2.7 MPa,此时系统控制汽车的节气门开度降为0,本车保持匀减速直线运动;在t=5.1 s时,触发二级制动,系统输出-8 m/s2的期望加速度,制动主缸压力为5.4 MPa,车辆以8 m/s2的减速度进行匀减速直线运动。t=6.8 s后两车相对距离为3.2 m,本车停止。仿真结果表明,本文提出的控制策略可以较好地实现避撞功能。 图14 接近前方紧急制动车辆(CCRb)仿真结果 提出了安全距离-时间模型相结合的汽车紧急制动系统分层控制策略。考虑了相邻车道前方车辆换道工况,设计了换道判断模糊控制器,以碰撞时间为依据进一步构建了本车前方危险目标模糊判别控制器。基于有限状态机与PID控制理论,设计了AEB系统上位与下位控制器。基于结合CarSim仿真环境与Simulink,进行了AEB系统动力学与控制器建模,针对CCRs工况接近前方静止车辆与CCRb工况接近前方紧急制动车辆典型工况进行了仿真验证,结果表明:本文提出的控制策略可以实现危险目标的准确判别、预警/分级制动以及避撞控制功能。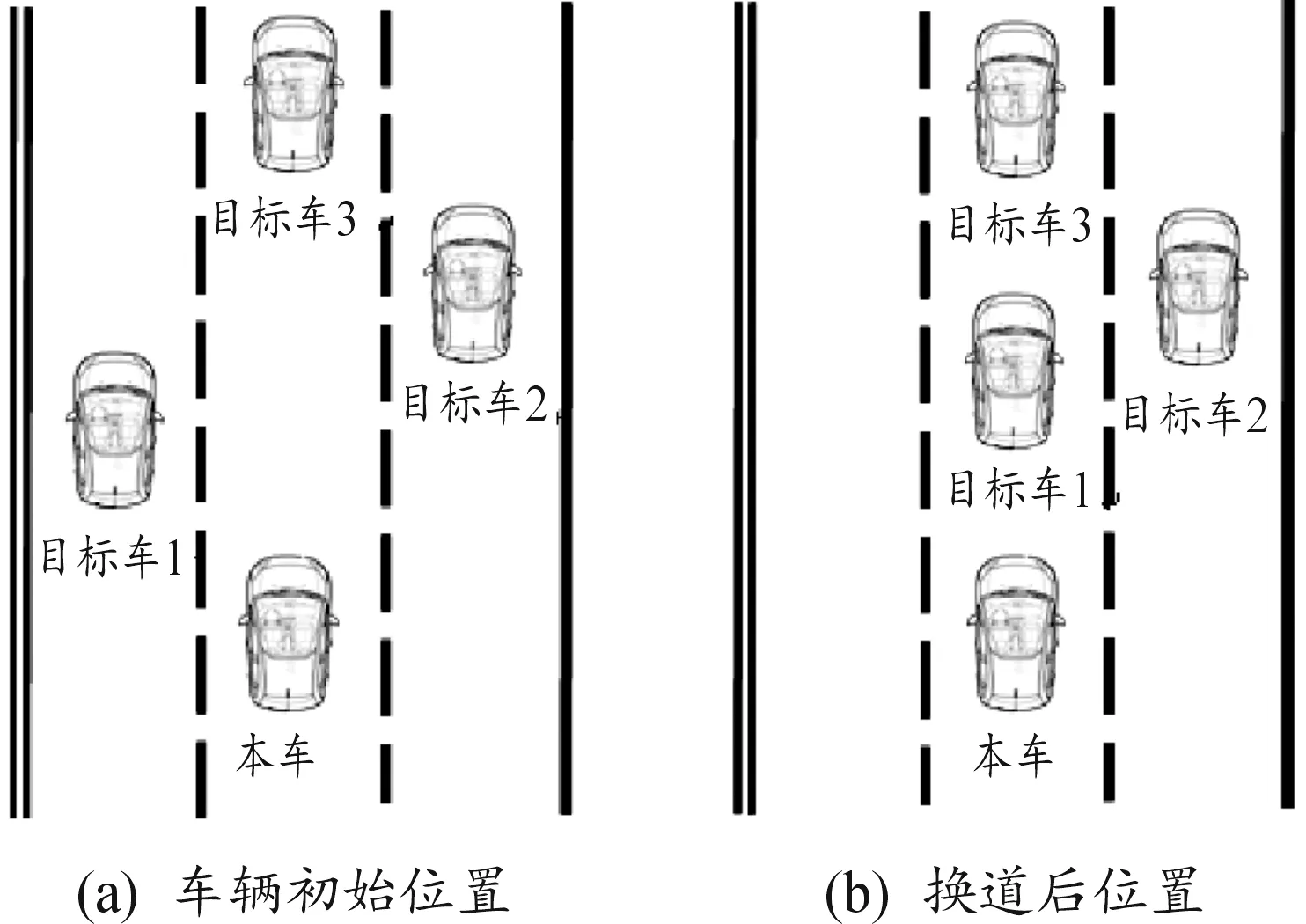
2.2 基于有限状态机的上层控制器设计
2.3 汽车紧急制动系统下层控制器设计
2.4 车辆纵向动力学模型及逆向模型建立


3 汽车紧急制动分层控制仿真
3.1 危险目标模糊判别仿真结果
3.2 预警分级制动策略仿真结果

4 结论
