高速列车精确停车的鲁棒自触发预测控制
2022-02-17刘晓宇高士根阴佳腾
刘晓宇 荀 径 高士根 阴佳腾
高速铁路作为一种大运量、低能耗、高效率的绿色出行方式,在公共交通体系中占有重要地位.列车自动运行(Automatic train operation,ATO)系统是进一步提升高速铁路安全、高效、舒适、节能的技术手段之一[1−2].列车自动停车控制是ATO 的一项核心功能,其目标是保证列车能够在预定位置安全、精确停车,同时保证停车过程中乘客的舒适度[3−4].随着站台屏蔽门在高速铁路系统中的应用(如:京张高速铁路站台屏蔽门),为保证乘客在装有屏蔽门的站台上下车不受影响,对高速列车停车精度提出了更高的要求.
与智能交通系统中“路径速度规划−路径速度跟踪”的两级式控制结构[5−6]相似,列车停车控制多采用“制动曲线生成−制动曲线跟踪”的两级式控制结构.ATO 系统首先根据当前速度和停车点信息生成推荐速度曲线,进而通过速度控制实时跟踪该曲线实现精确停车.列车运行过程中的冲击率(加加速度)是影响舒适度的重要因素[7],在保证跟踪精度的同时应尽量减少控制输出的变化,从而减少加速度的变化、降低冲击率以提高舒适度.同时,高速列车运行环境复杂,停车控制过程还会受到运行阻力等外部环境的干扰[8],控制方法设计过程中应综合考虑这些影响.
目前,工程实际中常采用比例−积分−微分(Proportional−integral−derivative,PID)控制器进行跟踪控制[2].实际控制器设计过程中需要针对不同的列车、线路等情况通过大量试验和反复调试获得PID 参数,工作强度大、经济成本高.同时,控制输出的频繁切换还会影响制动设备生命周期和乘客舒适度[8].
Yasunobu 等[9−10]最早对列车停车控制问题进行研究,并综合乘客舒适度、停车精度、运行时间等因素,提出了一种模糊预测控制算法.Hou 等[3]基于终端迭代学习控制思想提出了三种控制算法,该算法能够利用历史数据提升当前的控制效果.Jin等[4]在此基础上提出了最优终端迭代学习控制方法,并分析了终端跟踪误差的单调收敛性,但是上述方法的分析和设计过程中未考虑控制系统的时延等性质.Chen 等[11]分别用线性模型、广义回归神经网络模型和基于自适应网络的模糊推理模型估计初始速度位置与列车停车误差间的关系,但该方法没有从控制策略本身的角度考虑提高控制效果.进而,Chen 等[8]对比了基于专家经验的启发式在线学习算法、基于梯度下降的在线学习算法和基于强化学习的在线学习算法的控制效果,但该方法的效果依赖应答器提供的定位信息.
于振宇等[12]分析了城轨列车制动模型的特点,将制动过程用一阶时延系统近似,确定了城轨列车制动模型.基于此模型,Wu 等[13]将广义预测控制应用于停车控制器的设计,并引入参数在线辨识提高算法对模型参数变化的自适应能力.罗仁士等[14]设计了城轨列车自适应停车控制方法,该控制方法可以根据模型参数变化的情况进行自适应调整.王青元等[15]引入滑模控制将列车运行阻力作为扰动进行处理,并从减少控制输出频繁切换的角度考虑了舒适度,提出了自适应终端滑模控制方法,使方法对模型参数和外部干扰都具备自适应性.现有的列车停车控制研究多基于城轨列车进行,然而高速列车的停车过程多在露天环境下完成,且不同停车车站间的空间跨度大,运行环境更加复杂,迫切需要提出对外部干扰鲁棒性更强的停车控制方法.
模型预测控制(Model predictive control,MPC)是处理有约束控制问题的有效方法,已经在理论和应用领域受到广泛重视[16−17].MPC 在高速列车运行控制[18]和城轨列车运行控制[19−20]中也有相关应用.Liu 等[21]将MPC 用于高速列车停车控制中,并通过仿真结果验证了方法的有效性.基于状态空间模型的MPC 算法可以充分应用现代控制理论的研究成果,是MPC 的重要方向[22−24].Tube MPC 作为一种鲁棒模型预测控制方法能够有效地处理外部附加干扰的影响,该方法能够降低开环预测的保守性,同时不增加额外的在线计算量[25−26].
自触发控制能够自主确定当前控制输出和下次控制输出变化的时间,降低对实际系统采样和通信能力的要求[27].该方法能有效抑制控制输出的频繁变化,提升列车停车控制过程中的舒适度.Berglind 等[28]提出了线性约束二次型性能指标的自触发模型预测控制(Self-triggered model predictive control,SMPC)方法,并分析了方法的稳定性.Xun等[29]将SMPC 用于高速列车协同控制中,取得了较好的效果.进一步,有关学者提出了鲁棒自触发模型预测控制(Robust self-triggered model predictive control,RSMPC)方法以提高SMPC对外部附加干扰的鲁棒性[30−32].
本文基于模型预测控制在精确停车问题中的研究思路[21],结合高速列车停车控制过程的特点,考虑提高列车在复杂运行环境下的停车精度和舒适度,设计了基于鲁棒自触发预测控制的精确停车控制器,并对控制器的性能进行分析.该方法能够综合考虑跟踪误差和控制输出切换频率,且能保证外界阻力干扰下运行状态的可行性.同时,该方法不需要在每个采样时间都基于列车当前状态求解优化问题,降低了对系统采样和通信能力的要求,提高了工程实用性.
1 列车动力学模型
目前很多高速列车运行控制的理论研究围绕多质点模型进行,以考虑高速条件下列车内部各车厢之间的车钩力以及控制的一致性[33].然而,在高速列车停车过程中,由于车站限速等因素,列车运行速度较低(通常,v ≤80 km/h).实测数据表明,单质点模型能够用于描述高速列车停车阶段的动态.单质点模型包含参数少,同类算法在应用中计算效率更高、可调整参数更少,更容易用于工程实际中.
列车实际制动过程(如图1)中,由司机或ATO产生制动指令,制动控制单元(Braking control unit,BCU)接到制动指令后,会自动为列车内部各车厢分配所需制动力,各制动装置(制动器)进而做出响应动作,并通过列车动力学产生相应的运行状态(速度、加速度等).因此,在现有列车运行控制系统中,ATO 通常不能直接控制各车厢的制动力,所以采用单质点模型设计控制器更符合现阶段的应用条件.在此背景下,许多高速列车运行控制模型的相关研究围绕单质点模型进行[34−35].

图1 列车制动控制过程Fig.1 Diagram of train braking control process
高速列车停车过程中,列车制动模型可以由一阶时延系统表示:

在时域内表示为:

其中,t为时间,ac(t) 是由制动系统作用而使列车产生的加速度,at(t) 表示目标加速度,τ是系统响应时间常数,Td是系统时延.
加速度at(t) 是制动系统的目标加速度,由司机或ATO 的制动指令u(t) 产生:

式中,u(t) 是制动指令,F(·)是 u(t)到at(t)的变换函数,在列车停车控制过程中,F(·)可以近似作为线性函数处理:

其中,c为固定常数[12].
列车的实际加速度为:

其中,a(t) 为列车实际加速度,ac(t) 是制动系统产生的加速度,ar(t) 表示列车运行阻力产生的加速度.
上述过程可以由图2[12]表示.

图2 列车制动模型Fig.2 Train braking system model
列车运行阻力根据产生原因可以分为附加阻力(包括坡道阻力、曲线阻力等)和基本阻力.列车运行阻力产生的加速度可表示为:

式中,aw(v) 是基本阻力产生的加速度,ag(s) 是坡道阻力产生的加速度,v和s分别表示速度和位置.曲线阻力等附加阻力可以转换为坡道阻力来表示.
列车基本阻力受多种因素的影响,常用Davis经验公式[36]表示:

式中,β0和β1表示由线路条件、轮轨耦合等阻力的加速度参数,β2表示空气阻力的加速度参数.
2 高速列车精确停车预测控制
列车停车初始速度为v0,初始位置为s0,推荐制动曲线由预定停车时间和到停车点的距离反推得到,推荐加速度为a0.高速列车精确停车控制问题可表述为:在上述制动系统模型和相关约束下,控制列车跟踪推荐速度曲线,实现精确停车,使停车精度在±50 cm 以内,并保证停车过程中的舒适度.
2.1 基于状态空间的预测控制
列车停车控制过程的动态模型可以用如下状态空间方程表示:

式中,v(t),s(t) 分别表示列车实际速度和位置.
将上述单输入多输出系统的状态空间模型进行离散化,并写成控制增量 ∆u的形式,以显式描述控制输出的变化:

其中

式中,T为采样时间,是离散状态空间方程中的时延项,w(k) 为阻力干扰项.冲击率(加速度的变化率,加加速度)是影响舒适度的重要因素,抑制加速度的变化能从减少冲击率的角度提高舒适度.制动加速度与控制输出成线性关系,因此抑制u(k)的变化可以改善舒适度.将 ∆u(k) 显式表示可以更好地处理控制量的频繁切换.
坡道阻力等线路参数均为已知量,基本阻力可以根据惰行数据进行辨识[37],进而将w(k) 作为前馈项进行处理,得到线性化模型

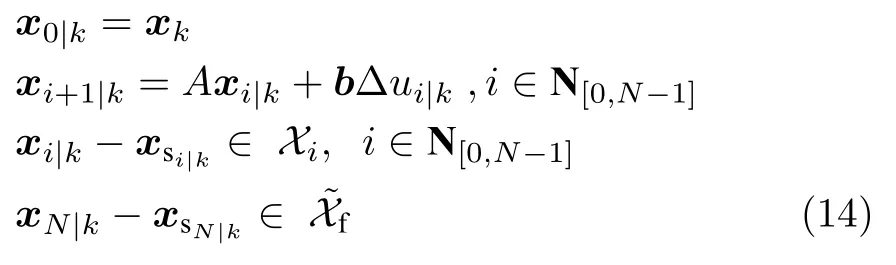
定义在k时刻的预测值:xi|k=x(k+l+i),∆ui|k=∆u(k+i),ui|k=u(k+i),预测时域和控制时域均取为N,预测控制问题为在每一步求解如下线性约束二次型优化问题PN(∆u) :

PN(∆u)的约束为:

式中,xk表示k时刻的实际值;X表示跟踪误差的可行集,可由预测状态xi|k的可行集结合得到;N[0,N−1]表示从 0 到N −1 的整数;Xf为终端不变集.
PN(∆u)为二次型性能指标、线性约束的凸优化问题,可以找到很多快速求解算法,求解PN(∆u)可得最优控制增量向量.

2.2 精确停车鲁棒预测控制器设计
问题PN(∆u) 为外部阻力完全已知情况下的预测控制,没有考虑阻力干扰存在的情况下列车状态是否仍然满足约束X和Xf,因此不能保证MPC的可行性和稳定性[25].此外,实际停车过程中,外部阻力干扰不可能完全已知.本文将外部阻力作为有界外部干扰w ∈W,设计基于Tube MPC[25−26]的列车停车控制方法.
Tube MPC 在每一步的优化问题中仍假设N步以后采用反馈控制策略,并以此来计算终端集和终端代价函数,以及预测干扰的影响:

其中,K ∈Rn且能保证Acl:=A+bK为H u rwitz 矩阵.停车控制过程中,初始位置和速度分别为s0,v0,推荐加速度为a0,推荐速度曲线满足此时状态跟踪误差为:

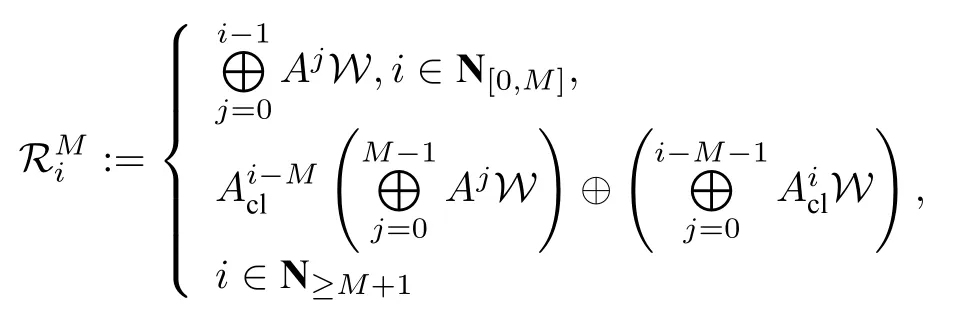
考虑干扰的条件下,式(12)中的约束变为[25]:
式中

其中,⊖表示Pontryagin 集差,⊕表示Minkowski集和,表示从j=0到j=i的Minkowski 集和.Σ为保证N步之后递推可行性的鲁棒不变集.
干扰不变集为:

对于本文的停车控制问题,在反馈控制率下,Z为多面集,且可以用文献[38]的方法经过有限次计算得到合适的外部估计.
可知:

Z为最小不变集,即鲁棒不变集Σ应满足,

式中,Σ0为最大跟踪误差容许集,可由文献[39]中的方法计算得到.
目标函数仍为式(11),考虑时延、初始状态均为已知量,则J(k) 为 ∆u的函数,记N步控制增量∆U的可行集为

由上文,优化问题中假设N步预测后系统采取反馈控制率 ∆u=K(x −xs),则k+1 时刻的一组可行控制策略为:

∆Uk+1的可行性可由约束式(14)保证.此时对应的性能指标为:

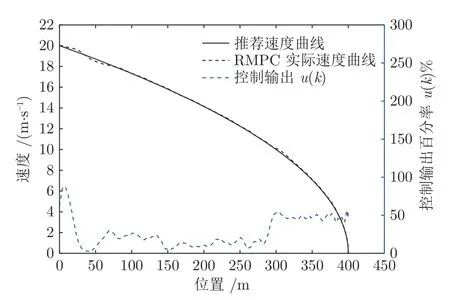
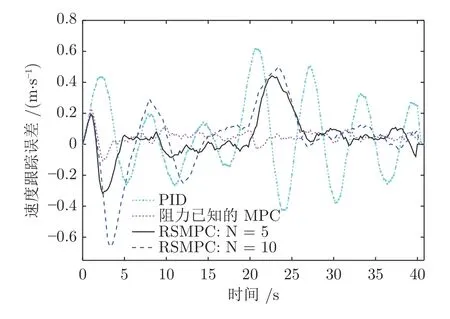
因此,要使J(k+1) 应用Schur 补,可得求解P的线性矩阵不等式(Linear matrix inequality,LMI): k+1时刻性能指标的最优值J∗(k+1) 需要指出,对于k时刻的任一可行控制序列,在k+1 仍按上述方法设计可行控制序列,只要式(19)满足,仍可得到稳定的控制器设计,即稳定性不依赖最优性,这有利于减少在线计算量[40]. 由此,基于Tube 的鲁棒预测控制(Robust model predictive control,RMPC) 即为将原始MPC 问题 式(11)中的约束直接换为式(14)得到.约束的变化可以离线进行,不增加在线计算量[25−26]. 列车精确停车预测控制在滚动时域优化的每一步都要基于当前运行状态求解线性二次型优化问题,这对列车的采样、通信能力等提出了极高的要求.每次求解获得新的控制量还会使控制输出频繁切换,影响舒适度.自触发控制[27]能够自主确定当前控制输出和下次控制输出变化的时间,是进一步降低控制输出的频繁变化,提升舒适度的有效方法.Berglind 等[28]提出了线性约束二次型性能指标的自触发模型预测控制(Self-triggered model predictive control,SMPC)方法,并分析了方法的稳定性. 为了更有效地处理外部干扰,Brunner 等[32]系统地研究了基于Tube 的鲁棒自触发模型预测控制(Robust self-triggered model predictive control,RSMPC)方法,该方法通过引入Tube 内的附加变量保证了无限时域下状态变量的闭环鲁棒稳定性,但是该方法使滚动优化过程的变量数量增加了一倍.本文基于文献[32]的思路,直接在RMPC 中引入自触发机制,得到高速列车精确停车鲁棒自触发预测控制方法. 由式(18)可得: 进一步有: 进而可得精确停车预测控制器的次优性,且性能指标存在次优性上界.同时,随着时域的不断前移,次优上界随着滚动优化的过程不断减小[22−23]. 由式(21)可以得到[28]: 式中,β ≥1 为系统次优性和自触发控制计算次数的平衡参数. 在自触发预测控制的框架下,只需在采样时间{tl|l ∈N}⊆N 获取列车运行状态,并计算在区间[tl,tl+1)的控制输出,在区间内控制输出保持不变: 将式(23)写成控制增量的形式: 对所有的l ∈N,在每个时间tl,自触发预测控制的目标是计算控制增量 ∆utl和距更新时间tl+1的间隔M ∈N[1,N),使得在保证控制效果次优性(式(22))的基础上,M取尽量大,以减少控制输出的频繁切换.在时刻tl,tl+1,···,tl+1−1,控制器将采用同样的控制量l,所以在时刻tl+1,···,tl+1−1系统不需要进行采样和计算. 在k时刻求解优化问题,考虑假设k+N时刻以后采用反馈控制策略,则RSMPC 每一步的优化问题可写为: 式中,M ∈N[1,N−1]为控制输出不变的步数. 在i 式中,N≥M+1为大于等于M+1 的整数. 式中 其中,Σ应同时满足式(16)及式(27). 目标函数JM(k) 为∆u的函数,记M步RSMPC问题中,N步预测控制增量 ∆U的可行集为 列车精确停车鲁棒自触发预测控制问题可写为: 式中 当β=1,M=1 时,RSMPC 问题退化为原RMPC 问题.可以选择适当的β使系统在保证控制效果前提下,尽量减少控制量的切换次数,以提升舒适度. 原Tube MPC 问题N步预测控制的递推可行性由约束式(14) 保证,这与M=1 时的RSMPC问题对应,RMPC 的递推可行性能够保证,可知保证RSMPC 递推可行性的解存在. 根据式(22)有: 以t=∞表示停车控制完成,此时预测状态的代价函数J∗(∞) 趋近于零,于是上式累加可得: 由此可知RSMPC 性能指标在满足约束的条件下存在有限的上界和下界,预测状态稳定列车实际状态可保持在鲁棒不变集 Σ 内. 高速列车精确停车RSMPC 方法的步骤如下: 步骤1.确定列车制动系统相关参数,输出参数A,b,确定K使得Acl为Hurwitz 矩阵,选择合适的Q,R,由式(26)计算引入RSMPC 后的约束.初始化k=0,i=0,ti=k. 步骤2.采集列车当前的速度、位置等状态xk. 步骤3.求解优化问题式(29),得到: ∆uti=,和M∗(xk) . 步骤4.将用于列车实际控制.由M∗(xk)确定列车下一时刻的采样和计算时间: 步骤5.判断:若k 本节基于高速列车实际运行数据对列车精确停车控制方法的有效性进行仿真验证,ATO 的停准停车窗为±50 cm.主要仿真参数设置如表1. 表1 仿真参数设置Table 1 The simulation parameters 坡度(‰)设置为: 为验证方法的有效性,本文将PID 算法、阻力完全已知的理想MPC 算法、基于Tube 的RMPC 算法、RSMPC 算法的仿真结果进行对比. 调整PID 参数使得控制器能达到规定的停车精度,PID 停车控制的曲线如图3 所示.为更好地体现控制输出变化情况,控制输出百分率u(k) 以右侧纵坐标表示.PID 控制的停车误差为28.98 cm. 图3 PID 列车停车控制的速度−位置曲线Fig.3 PID speed-distance profile of train stopping 在MPC 中将阻力干扰作为已知项进行前馈处理,得到停车控制曲线如图4,控制输出百分率u(k)以右侧纵坐标表示.理想MPC 的停车精度为5.95 cm,但此时将阻力作为已知项进行前馈,实际应用中很难实现. 图4 MPC 列车停车控制的速度−位置曲线Fig.4 MPC speed-distance profile of train stopping 为验证不同预测时域下的RMPC 和RSMPC的控制性能,分别选取了预测时域N=5 和N=10进行停车控制,并得到仿真结果,对应制动控制命令输出百分率u(k) 也分别在图中给出. 由阻力已知的MPC 仿真结果(图4)和RMPC 仿真结果(图5、6)可以看出,相较于PID 控制,预测控制通过对 ∆u的惩罚和预测时域的设置明显降低了控制输出的变化幅度,提高了舒适度.同时,MPC 在控制过程中引入对未来状态的预测,跟踪效果更好. 图5 RMPC 列车停车控制的速度−位置曲线 (N=5)Fig.5 RMPC speed-distance profile of train stopping(N=5) 图7 给出了RMPC 在预测时域N=5 和N=10下的速度跟踪误差.仿真结果表明预测控制可以实现较高的跟踪精度.随着预测时域的增加,优化过程中考虑的预测信息变多,控制器对外界环境未知变化的反应变快,由此造成的速度跟踪误差也很快变小,然而,随着预测时域和控制时域的增加,滚动时域优化过程中未知参数也越多,计算时间也会明显增长.因此,使用RMPC 进行停车控制时,应综合考虑控制精度和求解速度的关系. 图6 RMPC 列车停车控制的速度−位置曲线 (N=10)Fig.6 RMPC speed-distance profile of train stopping(N=10) 图7 RMPC 不同预测时域下的速度跟踪误差Fig.7 RMPC speed tracking error of different horizons 图5、6 表明,RMPC 在列车停车控制过程,尤其是在变坡点处控制输出变化幅度较大,这会影响乘客舒适度,自触发预测控制可以改善此问题.图8、9 给出了预测时域N=5 和N=10 下的RSMPC停车控制曲线,可以看出,RSMPC 下控制量输出的切换次数明显减少.同时,自触发控制框架下,算法不需要在每个采样时间都采集列车运行状态和求解优化问题,降低了控制算法对系统采样和通信能力的要求,提高了实用性.图10 给出了N=5 和N=10的RSMPC 速度跟踪误差,预测时域越长,RSMPC 控制切换频率越低,但是这也会使跟踪误差变大,算法设计过程中应综合考虑这些影响. 图8 RSMPC 列车停车控制的速度−位置曲线 (N=5)Fig.8 RSMPC speed-distance profile of train stopping(N=5) 图9 RSMPC 列车停车控制的速度−位置曲线 (N=10)Fig.9 RSMPC speed-distance profile of train stopping(N=10) 图10 RSMPC 不同预测时域下的速度跟踪误差Fig.10 RSMPC speed tracking error of different horizons 对于高速列车,要求的停车精度是±50 cm,图11 给出了预测时域变化时RMPC 和RSMPC的停车精度变化情况.仿真结果表明,RMPC 的停车误差随着预测时域的增加呈降低趋势,但由于列车运行环境复杂,运行过程中受到多种不确定性干扰,这使预测时域继续增加,停车精度误差不再有明显提高.对于RSMPC,自触发机制使控制输出的变化频率降低,这也对跟踪精度造成一定的影响,在预测时域 3≤N ≤15 时,仍能保证达到要求的停车精度,停车误差在50 cm 以内. 图11 不同预测时域下RMPC 和RSMPC 的停车精度Fig.11 Stopping error of different prediction horizons with RMPC and RSMPC RMPC 和RSMPC 在列车精确停车控制问题上可以实现要求的停车精度.自触发机制可以降低控制输出的切换次数,系统无需在每个采样时间都获取列车实时的位置和速度并输出控制量,这降低了对系统采样和通信能力的要求,但这也使速度跟踪误差变大,停车精度降低,算法设计中应综合考虑这些问题.同时,高性能的ATO 系统也是该方法有效应用的基础. 高速列车运行环境复杂,停车过程中外部阻力等不确定性干扰较大.本文将阻力作为干扰项,使用鲁棒模型预测控制处理未知阻力干扰下的停车控制问题,鲁棒控制的引入不增加额外的在线计算量,并且能够达到要求的停车精度.进一步,结合高速列车自动停车控制过程的特点和需求,采用自触发模型预测控制方法有效减少控制输出的切换次数,在保证停车精度的同时提高了控制质量.本文中列车停车控制的滚动优化过程被转化成为线性约束二次规划问题,该问题的高效求解方法可以为算法的工程应用提供基础.同时,自触发机制下不需要在每个采样时间都求解优化问题,降低了对系统采样和通信的要求,提高了算法的工程实用性. 致谢 本文的研究得到了城市轨道交通北京实验室、城市轨道交通自动化与控制北京市重点实验室的支持和帮助.

3 精确停车鲁棒自触发预测控制
3.1 鲁棒自触发预测控制器设计












3.2 鲁棒自触发预测控制器的稳定性



4 仿真研究









5 结论