一种基于深度迁移学习的滚动轴承早期故障在线检测方法
2022-02-17毛文涛田思雨
毛文涛 田思雨 窦 智 张 迪 丁 玲
随着科技发展,各类工程设备的工作和运行环境变得越来越复杂.作为机械设备的关键零部件,滚动轴承在长期大载荷、强冲击等复杂工况下,极易产生各种故障,导致机械工作状况恶化.针对轴承的故障预测与健康管理(Prognostics and health management,PHM)技术应运而生.若能在故障发生初期即进行准确、可靠的检测和诊断,则有助于进行及时维修,避免严重事故的发生.早期故障检测已成为PHM 的关键技术环节之一[1].近年来,随着传感技术和机器学习技术的快速发展,数据驱动的智能化故障检测和诊断技术受到广泛关注.如何利用历史采集的状态监控数据、提高目标轴承早期故障检测结果的准确性和稳定性成为研究热点和难点,具有明确的学术价值和应用需求.
本文关注的是不停机情况下的早期故障在线检测问题.这种方式有助于实时评估轴承工作状态,避免因等待停机检查而产生延误、造成经济损失,因此对早期故障的在线检测越来越受到工业界的重视.由于在线应用场景的制约,与一般故障检测相比,早期故障在线检测具有如下需求:1)检测结果应具有较好的实时性,能尽可能快速准确地识别出早期故障;2)检测结果应具有较好的鲁棒性,能尽可能避免正常状态下轻微异常波动的影响,相比于漏报警(现有方法对成熟故障检测已较成熟),更需避免误报警;3)检测模型应具有较高的可靠性,在线检测过程中无需反复进行阈值设定和模型优化.上述需求对检测方法提出了新的挑战.
目前,在线场景下的早期故障检测基本是采用现有的早期故障检测方法、直接用于在线环境,其通常做法包括:从振动信号等监测数据中提取时频特征[2]、小波特征[3]、包络谱特征[4]等早期故障特征,进而构建支持向量机(Support vector machine,SVM)[2]、朴素Bayes 分类器[5]、Fisher 判别分析[6]、人工神经网络[7],单类(One-class) SVM[8]等机器学习模型进行异常检测,取得了一定结果.但是,上述方法通常无法自适应提取特征,同时需要一定的离线数据训练得到检测模型,但目标对象在线场景下采集到的数据有限,且其数据分布与训练数据的分布可能因随机噪声、变工况等原因而存在差异,导致离线训练的模型并不完全适合于在线数据,容易降低检测结果的准确性;其次,上述方法通常采用基于异常点的检测算法,未充分考虑样本前后的时序关系,容易因数据微小波动而产生误报警,降低检测结果的鲁棒性;再次,为降低误报警,这类方法需要反复调整报警阈值.此外,基于系统分析的故障诊断方法[9]利用状态空间描述建立机理模型,可获得理想的诊断和检测结果,但这类方法通常需要提前知道系统运动方程等信息,对于轴承运行过程来说,这类信息通常不易获知.近年来,深度神经网络已被成功应用于早期故障特征的自动提取和识别[10−11],可自适应地提取信息丰富和判别能力强的深度特征,因此具有较好的普适性.但是,这类方法一方面需要大量的辅助数据进行模型训练,而历史采集的辅助数据与目标对象数据可能存在较大不同,直接训练并不能有效提升在线检测的特征表示效果;另一方面,在训练过程中未能针对早期故障引发的状态变化而有目的地强化相应特征表示.因此,深度学习方法在早期故障在线检测中的应用仍存在较大的提升空间.
综合上述分析,提升早期故障在线检测效果的关键在于:1)提高早期故障特征的表示能力,尤其是增强正常状态特征与早期故障特征的区分度;2)合理利用不同工况、甚至不同来源的辅助数据进行模型训练;3)构建简单有效的报警策略,降低正常状态中的误报警率.考虑上述需求特点,本文拟从时序异常检测的角度出发,引入深度迁移学习方法,为早期故障在线检测问题提供一个有效的解决方案.作为机器学习领域的研究热点之一,迁移学习是一类运用已有知识对不同但相关领域问题求解的机器学习方法.通过利用一个领域数据(称为源域)所蕴含的先验信息、提升另一个相关但不同的领域(称为目标域)中预测模型的性能,迁移学习已被证明可有效解决可用训练样本不足的学习问题[12].其中,领域自适应方法[13]是迁移学习方法的一种,通过学习源域和目标域的公共特征映射,从而实现领域知识的跨域传递,实现不同来源辅助数据的跨领域信息传递.尤其是近年来深度学习技术快速发展,构建在深度神经网络之上的迁移学习方法开始受到国内外学者的重点关注.借助于深度模型自适应的特征提取能力和端到端的训练方法,深度迁移学习已经成功用于解决物体识别[14]、电池寿命预测[15]、疾病检测[16]等问题,证明利用深度模型提取不同领域数据的公共特征、提高目标域数据量较少情况下建模效果的做法是可行的.有学者采用深度自编码网络、深度卷积网络等构建迁移学习模型,并在故障诊断[17−20]领域取得了初步应用.这表明深度迁移学习方法可以在不同工况、不同噪声环境之间有效传递故障信息,弥补不同工况下轴承可用数据不足的限制,提高诊断精度.这类工作的关键在于利用深度模型自动学习跨领域状态监测数据的可迁移故障特征[17],并形成对故障发生模式的抽象描述信息.这一思路同样适合于早期故障的在线检测问题,即利用不同工况下辅助数据所蕴含的故障发生模式信息,提高在线环境下的时序异常检测精度.而从时序角度构建异常检测模型,以序列片段(而非样本点)作为检测对象,有助于提高异常状态的识别准确率,也利于提升故障报警的稳定性.
基于此,本文提出了一种基于深度迁移学习的早期故障在线检测方法.具体来说,本文通过在多层自编码器的目标函数中添加域间差异正则项与权重系数的Laplace 正则项,获得更具有表示能力的早期故障特征,并在此基础上,利用离线数据正常状态的排列熵值构建报警阈值,通过异常序列匹配,实现在线数据中时序故障模式的快速检测.最后,在滚动轴承实验上验证了本文方法的有效性.本文贡献可概括为:
1)提出了一种多域迁移深度自编码网络模型.与现有绝大多数深度迁移学习模型不同,该模型所提取特征可在有效减少多个源域数据分布差异的同时,放大时序数据的变化趋势,从而提高早期故障特征与正常状态特征的区分度,因此更适用于故障检测问题.根据作者文献调研,目前尚未发现深度迁移学习方法在早期故障检测问题上的应用.
2)提出了一种基于深度迁移学习的故障在线检测模型.该模型依托于不同工况数据提取的公共特征,将故障报警策略与在线检测相融合,直接通过异常序列的自适应匹配,完成故障报警.与现有研究主要依赖异常点识别的做法相比,这一做法可有效提高在线环境下故障检测的准确率和鲁棒性,同时降低误报警率.
1 问题描述
设在不同工况下对同一型号的轴承进行重复实验,可得多工况下的状态监测数据集每个工况下包含nk个样例.样本属于样本空间χk,数据生成服从边缘概率分布.由于受测量环境多样、操作条件存在差异等复杂因素的影响,不同工况下采集的数据分布有很大的差异.从统计分析角度可认为,不同工况的监测数据服从不同的边缘概率分布.
参考迁移学习相关概念和故障诊断领域相关术语[17],本文涉及的在线早期故障检测问题应满足以下条件:
1)所有数据都包括从正常状态到故障状态的退化过程,不同工况下的实验数据从正常状态到早期故障状态的演变具有内在的一致性.
2)监测数据集中,只有运行的初期阶段被认为是正常状态数据,其余数据不存在健康标记;同时,正常状态数据与早期故障数据变化幅度较小,相对较难以区分.
3)目标域Dt由在线检测的目标对象数据的样本空间χt及其服从的数据分布P(χt) 组成,即Dt={χt,P(χt)},由于在线场景限制,目标域数据量通常较少,同时需要实现快速、准确的检测.
4)源域Ds由与在线检测环境不同的工况下轴承数据样本空间χs及其服从的数据分布P(χs) 组成,即Ds={χs,P(χs)},为目标对象的在线检测提供所需的正常状态到早期故障状态的演化知识.
与故障诊断不同,在线故障检测本质为异常检测问题,即只有开始运行阶段的数据为正常状态标记,根据异常数据与正常状态数据的偏差实现检测.通过源域监测数据进行训练,可以建立其样本空间χs至正常状态标记空间γs的非线性映射关系f:χsγs,即为轴承的异常检测知识.由于目标域数据量通常较少,所建立的异常检测模型f:χtγt检测相对较难区分的早期故障数据存在一定困难,因此,本文旨在利用源域的异常检测知识,提高目标域的检测准确度.上述过程中,迁移学习的作用体现在:1)适配源域与目标域的监测数据分布,建立正常状态公共特征表示;2)借助源域中正常状态数据与早期故障数据之间的区分度信息,促进目标域检测模型的有效性和鲁棒性.
2 基于深度迁移学习的早期故障在线检测
整体而言,本文所提方法包括离线训练和在线检测两个阶段.其中,离线阶段的主要任务是深度迁移学习模型的构建和异常检测模型的构建,在线阶段则直接利用公共特征表示提取目标对象的特征并进行异常识别.为了表述方便,表1 给出了本文常用的符号总结.

表1 本文所用符号与对应描述Table 1 Symbols and corresponding descriptions used in this paper
2.1 多域迁移深度自编码网络
不失一般性,本文首先选取多层自编码器作为基础的深度网络模型.自编码器由编码器和解码器组成.编码器用于从输入数据中提取特征,表示为:H=f(WX+b);其中W为输入层与隐层的权重矩阵.解码器用于从提取的特征中重构输入数据,表示为:Z=g(W′H+b′):激活函数通常可使用sigmoid函数sigmoid(x)=1/(1+e−x).自动编码器的目标是使下列重构误差最小化:

其中,∥·∥F表示Frobenius范数.
其次,为了消除源域和目标域数据分布的差异,本文在损失函数中引入最大均值差异(Maximum mean discrepancy,MMD)正则项.MMD 是估计分布差异的一个准则,与KL 散度等参数化准则不同,MMD 基于再生核希尔伯特空间来度量误差,适合估计不同分布之间的非参数化距离,从而避免计算中间密度,减少计算工作量[18].以Ds,Dt为例,MMD 距离定义为[12]:

其中,H表示再生核希尔伯特空间,Xs和Xt分别表示源域和目标域中的输入样本集,ns和nt分别表示源域和目标域的样本个数.式(2)表示两个域的原始样本在非线性映射φ(·) 上的均值差异.寻找一个φ(·) 使得式(2)最小化,即可诱导得到两个域之间的公共特征空间.
需要注意的是,式(2)度量的是两个域之间的分布差异.而在故障检测问题中,由于主要采用正常状态数据构建检测模型,因此便于引入多种工况下的监测数据来训练迁移学习模型.若利用式(2)进行域间差异最小化,则需要两两操作,计算过于复杂;若将多种工况的数据统一作为源域Xs,又忽略了不同工况数据之间的分布差异.因此,本文对式(2)进行改进,以适配多个域的数据分布,得到具有普适性的公共特征表示,以便目标域中新采集的在线数据直接提取特征.首先,计算源域和目标域Xt中每组监测数据在φ(·) 上的函数值均值其中nj表示第j个轴承的样本数,sc表示工况数量;然后计算所有监测数据的均值其中m表示所有源域与目标域的轴承数;最后,计算上述两个均值的差,作为整体分布偏离程度的度量.考虑到异常检测的特点,故此处计算仅使用正常状态数据,其目的是解决不同工况下正常状态数据的分布差异.具体表达如下:

再次,由于最小化式(3)会迫使权重W下降至接近于零,从而导致信息丢失,为了使权值不为零并加强正常状态数据与早期故障数据的区分度,本文参考文献[21]中图像平滑的原理,构建权值矩阵的拉普拉斯(Laplace)正则项,如下所示:

其中,K表示多层自编码器中的权重矩阵的个数,σ表示惩罚因子,∆=D1⊗I2+I1⊗D2,I1和I2是单位矩阵,D1和D2是Laplace算子.此处D1和D2采用修正Neuman 离散化算子[21],其作用是对权重矩阵W进行二阶差分,使得W中相邻权重差异性变小,因此,最小化Lweight即可放大相邻权重的变化.此处计算使用从正常状态到故障状态的全部数据,虽然相邻权重差距变大会导致所有样本对应的隐层特征差异性变大,但对于早期故障样本,其数据幅值波动要大于正常状态样本,因此,对应权重的放大作用也要高于正常状态样本.由此,最小化Lweight可突出信号波动趋势,得到对早期故障更为敏感的特征表示.
将这三部分集成到一起,最终得到多域迁移深度自编码器的目标函数:

其中,λ,µ>0 为正则化参数.λ值越大,意味着对多域公共特征的提取能力要求越高,反之对不同域之间数据分布差异的容忍度越高;µ值越大,可更加突出相邻权重的差距,反之将减弱对信号波动的突出效果.最小化式(5)可采用小批量梯度下降法[20].多域迁移的深度自编码网络结构如图1 所示:
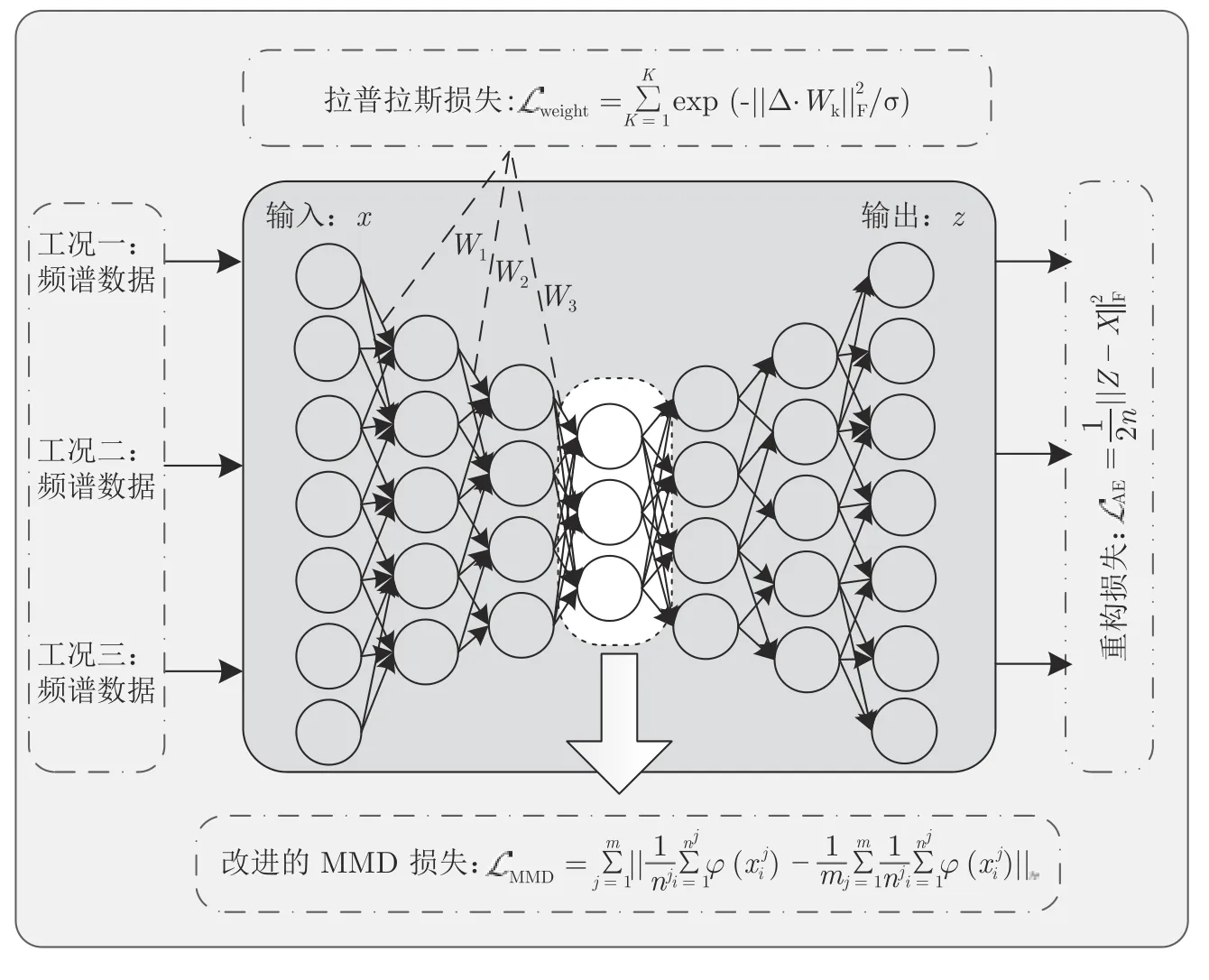
图1 多域迁移深度自编码网络结构图Fig.1 Architecture of deep auto-encoder network with multi-domain transferring
对于式(5)所给出的目标函数,优化步骤如下:
2) 前向传播:a)从训练集中选取小批量数据执行式(1),计算重构误差;b)取训练集中全寿命数据的初始部分的正常数据,通过公式H=f(W0X+b0)计算该正常期数据的隐藏层特征表示,并根据式(3)计算不同域之间的MMD 值;c)取训练集中全寿命数据,执行式(4),计算训练参数W的波动情况;d)执行式(5)计算该网络的目标函数值,然后进行迭代,若迭代次数小于设定值κ则执行步骤3),反之执行步骤4).
3) 反向传播:a)采用GradientDescent 优化算法,反向逐层更新带训练参数W,b;b)返回步骤2).
4) 特征提取:保存训练参数W,b,输入训练数据集频谱数据以及目标检测轴承的频谱数据,根据公式H=f(W0X+b0) 提取两者的隐藏层特征,进而进行异常检测模型的构建.
2.2 异常检测模型
在线场景下,故障检测模型应具有较好的准确性和实时性,同时应尽可能简单.本节拟采用异常序列检测的方式,利用排列熵构建鲁棒的检测模型.排列熵是一种动力学突变检测方法,对信号的微小变化有放大作用,具体原理参考文献[19].这里以第3 节实验数据中轴承1 为例进行简要说明.首先,对于第2.1 节提取的深度特征,划分成长度为100个样本的序列,对每一段序列计算其排列熵的值,其中滑动窗口为10 个样本,嵌入维数为3,延迟时间为3,对应排列熵值的变化如图2 所示,为便于观察,对图2 局部放大如图3 所示.

图3 图2 的局部放大图Fig.3 Partial enlarged view of Fig.2
图2 中可以看出,虽然排列熵可以放大数据的局部变化趋势,但需要设置一个合理的阈值进行在线异常检测.采用深度迁移学习方法,不同工况下的监测数据可以提取到公共特征,在此基础上,本文借助这些离线数据,计算更为合理的报警阈值.检测过程如下.

图2 本文方法所提取的公共特征及其对应的排列熵值Fig.2 The extracted common features and their corresponding permutation values
首先,利用第2.1 节中H=f(WX+b) 所提取的公共特征,计算不同工况轴承数据正常状态的排列熵值.具体步骤为[22]:1)对序列片段L={L(k),k=1,2,···,n}进行相空间重构,得到矩阵Kij;2)对Kij的每行进行升序排列,构建相应的索引矩阵Sij;3)计算序列L的排列熵:lnPi,其中Pi为Sij中每种排列出现的概率.本文中,为了便于计算,对HP E进行归一化处理,即0≤=HP E/ln(j!)≤1,其中j!为Sij中j列数据的总排列数.其次,确定上述排列熵的最小值作为阈值标准.最后,对在线检测数据,采用滑动窗口生成在线序列片段,并利用多域迁移深度自编码网络直接提取深度特征,再计算对应的排列熵值,将其与阈值标准进行匹配,匹配不上则意味异常发生.具体流程如图4 所示.

图4 所提方法流程图Fig.4 Flow chart of the proposed method
3 实验结果
为了验证本文所提方法的效果,本节在XJTUSY 数据集上进行对比实验.实验基本流程如下:用XJTU-SY 数据集[23]中的两个工况作为源域,另一个工况作为目标域,构建深度迁移学习模型,提取得到公共特征表示;在此基础上,将源域中两种工况下的10 个轴承加上目标域的4 个轴承作为离线数据,计算其排列熵值,确定异常检测阈值;最后,将剩余的一个轴承作为目标对象进行在线检测,利用训练好的公共特征表示直接提取特征,并按滑动窗口的方式逐序列计算排列熵值,与阈值进行比较,判断轴承是否异常.
本文所使用的算法环境是Python 3.6,实验电脑配置为Intel i5 7 300 处理器,8 GB 内存.所有数据在处理之前均线性归一化到[−1,+1].轴承振动信号均采用FFT 转换为频谱数据,作为各深度学习模型的输入.
3.1 数据集介绍
本实验选取的数据集是XJTU-SY 数据集[23].采集该数据集的实验平台如图5 所示,该平台能够对轴承进行加速退化实验,提供15 个型号为LDK UER204 的滚动轴承在整个使用寿命内的实际退化数据,如表2 所示.两个PCB 352C33 加速度计分别放置在垂直轴和水平轴上,用来测试振轴承动信号.采样频率为25.6 kHz,每分钟采样32 768 个样本点(相当于1.28 秒).由于加载方向为水平方向,因此放置在水平方向的加速度计能够捕捉到更多被测轴承的退化信息.本文选择水平振动信号来完成本实验的异常检测.

表2 XJTU-SY 数据集中三种工况描述Table 2 Description of three working conditions in XJTU-SY dataset

图5 实验平台[23]Fig.5 Experiment platform[23]
3.2 多域迁移深度自编码网络实验结果
本节主要给出所提深度迁移学习模型的效果.考虑到训练样本较多,为保证模型的可靠性,本实验中训练次数设为10 000 次,或训练损失小于0.01时终止训练.首先,以所有三种工况中的15 个轴承的正常状态信号为例,图6 和图7 分别给出了采用多层深度自编码器[24]和采用第2.1 节所提方法所得深度特征的概率密度分布图及特征分布图.如图6(a)可以看出,不同工况下轴承正常状态数据的分布存在较大差别,即使是相同工况下,轴承数据分布也有一些波动.而采用本文方法,如图7(a)所示,所有工况下的数据分布趋于一致.同时,对比图6(c)和图7(c),本文方法所提特征明显有聚合现象.这表明本文方法可有效提取不同工况下轴承正常状态数据的公共特征.

图6 采用多层深度自编码器提取的三种工况下轴承正常状态数据的特征分布Fig.6 Feature distribution of bearing normal state data extracted by multi-layer deep auto-encoder under three working conditions

图7 采用本文方法提取的三种工况下轴承正常状态数据的特征分布Fig.7 Feature distribution of bearing normal state data extracted by the proposed method under three working conditions
为验证本文方法的收敛效果,图8 给出了上述训练过程中训练误差的变化图.为了提高显示效果,图8 仅截取前1 000 训练轮次进行展示.可以看到,在训练次数100 左右,训练误差已经明显收敛,此后的训练轮次中,训练误差虽仍继续下降,但下降速度逐渐放缓,整体趋于收敛.

图8 本文方法训练损失变化趋势图Fig.8 Changing trend of training loss of the proposed method
为进一步验证深度迁移学习对于故障检测结果的效果,我们分别采用图6 和图7 所提特征,计算正常状态数据的排列熵,如图9 所示.
限于篇幅,此处不再提供每个轴承的特征序列和对应的排列熵值.由图9(a)可知,未采用迁移学习之前,由于正常状态数据存在一定的分布差异,导致其排列熵值几乎跨越从0 到1 的全部范围.而采用深度迁移学习提取公共特征之后,如图9(b)所示,正常状态数据的排列熵值保持在较小范围内波动,这意味着可根据波动范围设置一个合理的阈值作为异常检测的标准,为构建简单快速的在线异常检测模型提供了基础.
其次,为验证式(4)所示Laplace 正则项对于提取早期故障特征的作用,本文随机选取工况1 下轴承5 和工况2 下轴承4 为对象,分别计算本文方法加入Laplace 正则项前后所提特征及对应的排列熵值,如图10 和图11 所示.可以看出,对于两个目标轴承,采用Laplace 正则项后所提的公共特征(红线)在状态发生变化时波动幅度更大,其所对应的排列熵值更具有明显的阶跃现象.这表明式(4)所示Laplace 正则项可以有效增强正常状态与早期故障状态的区分度,提取的特征更为敏感,同时也表明,排列熵具有更好的判别效果.

图11 工况2 下轴承4 的特征走势及对应的排列熵值 (其中红线与蓝线分别为加入和未加入Laplace 正则项的本文方法所对应效果)Fig.11 Feature trend and the corresponding permutation entropy value of bearing 4 under working condition 2(where the red and blue curves show the effect with or without Laplace regularizer,respectively)
3.3 实验结果
本节分别选择两个轴承作为目标检测轴承,剩余14 个轴承用作离线训练,目标轴承所属工况即为目标域,另两个工况为源域.
实验1.Bearing1-5 为目标检测轴承
对工况1 下轴承5 的检测结果如图12 所示.可以看出,14 个离线训练轴承正常状态数据的排列熵值基本处于同一范围,这表明深度迁移学习有助于得到正常状态数据的公共特征表示.根据图12(a)所示离线轴承正常状态数据的排列熵值,得到报警阈值为0.7199,进而检测第1 090 个样本出现早期故障.这一结果与图12(b)中特征走势的变动也是吻合的.
实验2.Bearing2-4 为目标检测轴承
对工况2 下轴承4 的检测结果如图13 所示.与图12 相似,即使调整了源域和目标域的设定,本文方法依然可以得到14 个离线训练轴承在较小范围内的排列熵值,这再次验证了深度迁移学习在提取公共特征方面的效果.根据图13(a),得到报警阈值为0.6824,第960 个样本被检测为发生早期故障.

图12 Bearing1-5 轴承的检测结果Fig.12 Detection results of bearing 1-5

图13 Bearing2-4 轴承的检测结果Fig.13 Detection results of bearing 2-4
3.4 方法对比
为了进一步验证所提方法的优势,表3 给出了所提方法与6 种代表性早期故障检测方法的对比结果.这6 种方法既包括了两个最新的弱信号分析方法和两个代表性的异常检测算法,同时还包括了一种基于深度迁移学习的故障诊断方法和一种深度特征匹配的故障检测方法.下面首先给出这6 种方法的原理和实现细节.

1) BEMD-AMMA[25]:该方法利用弱信号分析来检测早期故障.该方法先用带宽经验模态分解(BEMD)重构原始振动信号,再用自适应多尺度形态分析(AMMA)对重构信号解调得到时域信号,经FFT 变换得到频谱信号,通过观察故障特征频率来判断是否发生早期故障.
2) LOF[26]:该方法是一种典型的基于距离的异常检测算法.本实验中,采用目标轴承初始阶段500 个样本作为正常状态数据,计算每个样本的LOF 值,并选择最大值作为异常检测的阈值,其中K 值设为10.采用多层自编码器提取特征,网络结构为[500,100,30],即最终提取的特征维度为30.
3) iFOREST[27]:该方法是一种基于数据切割的集成算法,通常被认为是最具有代表性的异常检测算法.该方法基本思路是根据每个数据被分割开需要的次数来判断异常程度,次数越少则越可能是异常数据.树的数目设为100,每棵树随机选择256个样本进行训练.采用多层自编码提取特征,网络结构为[500,100,30],即最终特征维度为30.
4) SDFM[28]:该方法是一种基于深度学习和异常序列匹配的早期故障在线检测方法.该方法通过滑动窗口的方式,对贯序采集的样本块采用深度自编码提取特征,并根据匹配精度的变化确定故障发生位置.本实验中,所采用自编码器的网络结构为[800,512,10],输出维度为10.滑动窗口大小设为100.
5) DAFD[18]:该方法是一种基于深度迁移学习的轴承故障诊断方法,通过在多层自编码器中添加MMD 正则项,提高不同工况下故障数据的诊断准确度.该方法适合解决源域中正常状态样本和故障样本已知、目标域只知道正常状态样本的故障诊断问题,因此也适用于在线检测问题.在本实验中,利用源域数据和目标域初始阶段少量正常状态样本训练诊断模型,此后贯序输入目标轴承的100 个样本识别是否发生故障.自编码器的网络结构为[500,100,50],MMD 正则项参数设为1,权重正则项参数设为10.
6) SRD[29]:该方法适合进行多工况下的故障检测,采用稀疏字典编码的方式,重构数据近似值与测量值的残差,并构建K 近邻距离统计量实现检测.由于该方法流程已包含对多工况数据的混合建模,因此本实验中,直接将源域和目标域共三种工况的数据输入模型,得到置信水平为95%的控制限,由此实现对目标轴承的早期故障检测.原始信号通过多层自编码器提取30 维特征.
由于上述方法2,3,5 和6 是针对样本进行故障检测,本实验中将连续出现3 个异常样本认定为故障发生,在该样本前出现的异常点即为误报警.方法1 和4 分别采用信号分析和故障模式匹配的方式,首次出现异常即认定为故障,不存在误报警.对比结果分析如下:
1) BEMD-AMMA:表3 中,该方法对于Bearings2-4 的检测结果不存在,故取最后一个样本为检测结果.出现该结果的原因有两个:1)轴承故障频率的计算值与实际值存在一定的差别;2)该方法本质上是一种去噪算法,若去噪效果不好则检测结果也会受影响,因此应用于在线检测时结果存在一定限制.
2) LOF:该方法的检测结果虽与本文方法基本一致,没有延后,但是误报警的情况却很严重.究其原因,异常检测结果受正常状态数据波动影响较大.图14 给出了与本文方法的对比效果图,可以看出,正常数据的轻微波动都会被LOF 检测为异常而触发误报警,而本文方法采用异常序列(而非异常点)检测的策略,可以很好地解决该问题.

图14 本文方法与LOF 算法的检测结果对比图 (其中,本文方法横坐标为序列编号(即样本号除以100),标签值大于0 表示样本识别为正常样本,小于0 表示识别为异常样本)Fig.14 Comparative detection results between the proposed method and LOF algorithm (while x-coordinate of the proposed method denotes sequence number (equal to the sample number divided by 100),the label value greater than 0 means the corresponding sample is recognized as normal sample,else as anomaly)
3) iFOREST:由表3 可以看到,该方法不仅检测结果略靠后,误报警也相对严重.这是因为对于在线检测问题,随着样本数的增多,iFOREST 切割次数随之增大,因此无法提供稳定的在线检测结果.由于iFOREST 方法被认为不适用于高维数据,本实验中分别在5 至50 维特征上进行实验,发现检测结果区别并不大,最终选择30 维特征的结果进行对比.
4) SDFM:从表3 可以看出,该方法检测结果较为理想,同时没有误报警,这验证了时序异常检测策略的有效性.但相比本文方法,在Bearing1-5的检测结果略有延迟.分析原因,这是因为该方法直接将所有离线训练轴承数据直接输入深度神经网络提取特征,并未考虑数据分布不一致的问题.由此表明,对于分布存在差异的不同来源数据,直接输入深度学习模型存在一定限制,经过领域适配则有助于进一步提高深度特征的表示能力.
5) DAFD:该方法的诊断结果相对靠后.虽然该方法同样采用深度迁移学习技术,但其出发点是对正常状态与故障状态数据进行诊断,所采用的MMD 距离也是对正常状态数据寻找公共特征子空间.如果数据区分度较大,该方法效果较好,但对于早期故障数据,故障发生界限并不明显,此时该方法无法有效地识别数据的缓慢变化.相反,本文方法在深度迁移模型中构建Laplace 正则项,在寻找不同工况正常状态数据公共特征表示的同时,增大正常状态与早期故障状态特征的区分度,因此检测结果对于早期故障更为敏感.
6) SRD:该方法采用概率密度估计计算异常检测阈值,检测结果与置信区间的设定密切相关,置信区间增大,误报警数降低,但检测结果后移.该方法检测结果与其他对比方法结果相近,同时误报警数较低,尤其与DAFD 相比,其检测结果明显提前.这表明该方法对多工况下的监测数据实现了有效融合,所采用的稀疏字典编码的方式可以起到类似于迁移学习的效果.但与本文方法相比,其检测结果仍相对靠后,这是因为该方法并未采用序列检测的方式、也没有充分考虑增强早期故障特征的区分度.
4 结论
本文针对轴承早期故障的在线检测问题,提出了一种基于深度迁移学习的异常序列检测方法.该方法可有效适配多工况下的轴承监测数据,同时也利用Laplace 正则项生成更为敏感的早期故障特征,不仅有助于进行基于排列熵的时序异常检测,同时增强了检测模型的鲁棒性,降低误报警率.该方法模型简单、结果可靠,因此更适用于早期故障的在线检测.
在下一步工作中,拟计划引入时序深度学习模型,有针对性提取时序特征并进行异常序列检测;此外,在线检测本质是一种半监督分类问题,如何实现跨工况、多来源数据上的在线半监督分类,是需要理论上重点考虑的问题.