基于近场技术的微纳尺度热物性测量系统空间分辨率增强
2022-02-17郑利兵王大正孙方远刘珠明
刘 燕, 张 超, 郑利兵, 王大正, 孙方远, 刘珠明
(1. 中国科学院 电工研究所, 北京 100190; 2. 中国科学院大学, 北京 100049;3. 北京科技大学 能源与环境工程学院, 北京 100083;4. 冶金工业节能减排北京市重点实验室, 北京 100083;5. 广东省科学院 半导体研究所, 广东 广州 510650)
随着微电子技术的发展, 物质结构的研究已深入到微纳米领域. 由于尺度效应和量子效应的存在, 传统的傅里叶导热定律在微纳米尺度不再适用[1], 这对物质微纳米尺度热物理性质的测量提出了新的要求.
当前的微纳米尺度热物理性质的测量方法包括: 基于物理接触的瞬态平面热源法[2]、 热线法[3]、 稳态法[4]、 3ω法[5]和光学非接触的光热测量技术等. 光热测量技术因其无损、 响应迅速等特点而备受关注. 光热测量技术又分为光热辐射测量法(PTR)[6]、 激光闪光法[7]、 光声法[8]、 激光偏转法[9]、 激光引发热反射栅方法[10]和光热反射法[11]等. 其中, 光热反射法以其高灵敏度、 高分辨率、 数据分析相对简单等优点, 得到了越来越广泛的应用. 以光热反射法为基本原理的飞秒激光时域热反射技术可实现对纳米薄膜热导率、 界面热阻、 复合材料热导率、 粉体/液体热导率、 多孔介质材料热导率的测量及对界面热输运性质的研究. 通过提供散热、 隔热、 蓄热系统设计中必不可少的热物性数据, 可以为NEMS/MEMS、 微电子及光电子、 航空航天、 工业节能等领域提供服务, 突破由传热问题带来的发展瓶颈, 同时推动上述工业领域中新型功能材料的研究及应用的快速发展.
光热反射法的基本原理是使用一束经过周期调制的加热光照射到样品表面, 引起样品表面温度的周期变化, 由于样品表面的反射率与温度有关, 所以另一束照射到样品表面的探测光的反射信号也将发生改变, 比较探测光的发出信号与反射信号, 根据导热模型得到样品的热物性信息. 随着激光技术的发展, 脉冲激光的脉宽已经从纳秒提高到飞秒级别, 超短脉冲激光可以提高时间分辨率, 因而得到了普遍的应用. 通过控制这两束脉冲激光到达样品表面的时间差可得到包含样品热物性信息的瞬态光热反射信号, 称作时域热反射法(Time-Domain Thermoreflectance, TDTR)[12].
空间分辨率是时域热反射法的另一个重要技术参数. UIUC大学的Cahill团队利用时域热反射方法实现了对合金材料样品的二维扫描热成像, 空间分辨率为4 μm[13]; 中国科学院工程热物理研究所的唐大伟团队搭建的飞秒激光时域热反射系统, 空间分辨率为6 μm[14]; 由先调制后倍频改为先倍频后调制等多种技术改进后, 飞秒系统二维扫描热成像分辨率达到了2 μm级别[15], 并实现了对液体热导率[16], 纳米薄膜材料热导率及界面热物性的测量[17-18]; 中国科学院电工研究所石宏开在探测激光直径为13 μm的双色飞秒激光时域热反射系统中, 获得了10 μm左右的空间分辨率[19]. 微纳结构尺度的减小, 要求时域热反射法具有更高的分辨率. 为进一步提升飞秒热物性测量系统的分辨率, 本实验系统采用了时域热反射与近场光学技术结合的方法.
根据近场光学的探测原理, 当用一个微小的物体(如探针尖端)在近场范围内进行平面扫描时, 就可以得到关于被扫描物体表面的二维图像. 本文在传统飞秒激光时域热反射系统的基础上, 建立了扫描近场光学系统, 并采用透射率更高的悬臂梁硅探针, 获得了1 μm的热物性扫描空间分辨率.
1 原理和实验系统
1.1 基于近场探针的近场技术
物体表面以外的区域可以被划分为两种, 一种距离物体表面一个波长范围以内, 称为近场区域[20], 其余则为远场区域. 傅里叶光学告诉我们, 平面XY内任一光波, 可以分解成空间各个方向传播的一系列平面波的叠加.首先, 考虑沿n方向传播的一束单位振幅平面波eikr, 若传播方向k与坐标轴(x,y,z)所成夹角为(θ1,θ2,θ3), 则z处的光场可以表示为

(1)
而z=0处光场为

(2)

(3)

(4)
式中:d为空间频率的倒数, 表示物体大小, 也就是说只有大于一个波长λ的结构可以传播到远场, 并可以被探测器探测到. 由瑞利判据(Rayleigh Criterion)可知, 远场光学在原理上存在衍射极限, 即远场光学的分辨率最高只能达到波长的一半, 极大地限制了基于远场光学原理进行光学观察及其他应用时的最小分辨尺寸.

(5)

(6)

所以, 物体精细结构(d<λ)的信息不能传播到远场, 物体在近场范围内产生的隐失场不服从瑞利判据, 从而打破了远场衍射极限, 分辨率在原理上可以无限地小[21]. 当光通过具有纳米级光阑孔的探针, 并且探针与样品间距离在近场范围内时, 隐失波局限在探针附近物体表面. 因此采用近场光学技术可大大提高飞秒激光时域热反射系统的热物性扫描空间分辨率, 为实现纳米尺度热物理性质的测量和热输运机理的研究提供了科学手段. 光学分辨率达到纳米量级的近场光学技术在纳米光学元器件、 纳米光刻和超高密度近场光存储等诸多领域都得到了应用.
1.2 基于飞秒激光时域热反射法的热物性测量
飞秒激光时域热反射信号是被测量样品各种物理参数的函数, 例如样品的尺寸、 材料的热导率、 比热容、 密度等. 在已知被测量样品的全部物理参数的情况下, 可以通过构建导热模型计算出对应的时域热反射信号. 由于导热模型的复杂性, 导致不能通过实验测得的时域热反射信号直接解析求得样品的全部热物性, 但是在已知大部分物理参数的情况下, 通过拟合1~2个未知热物性参数的方式, 将导热模型计算结果与实验测得的时域热反射信号之间的偏差最小化, 间接获得这些未知参数.
由于累积效应的存在, 在大多数实验条件下, 当激光照射在样品上时, 能量不仅在纵向上输运, 也在横向上传递. 圆柱坐标系下的傅里叶热输运方程为[22]

(7)
式中:σz和σr分别为材料轴向和径向热导率;ρ和c分别为材料的密度和比热. 对式(7)进行汉克尔变换可得
(8)
式中:k为汉克尔变换系数. 对式(8)进行傅里叶变换可得

(9)

(10)
已知样品表面的热流密度来自于被调制过的加热激光脉冲, 单位强度加热激光可以表示为
(11)
式中:Rpump为高斯光斑的1/e2半径, 对式(11)进行汉克尔变换可得
(12)
整理上述公式可得

(13)
利用采样定理可以得到样品表面对单位强度加热激光的脉冲响应
H(ω)=

(14)
飞秒激光时域热反射系统的传递函数为

(15)
式中:β为被测量样品表面的光热反射系数;Qpump为单个加热激光脉冲的能量;Qprobe为单个激光脉冲能量;ωs为脉冲激光串的重复频率;ω0为电光调制器正弦信号的调制频率.
通过传递函数可以将系统的输入信号转变为锁相放大器的输出信号.
z(t)=Z(ω0)eiω0t=Aei(ω0t+φ),
(16)
式中: eiω0t为系统的输入信号;A和φ分别为锁相放大器输出的振幅和相位信号.
通过Matlab软件, 调整未知热物性参数取值以及最小化理论输出信号与实验输出信号之间的偏差, 拟合得到样品的热物性参数.
1.3 实验系统
微纳尺度热物性测量系统采用飞秒激光时域热反射系统和扫描近场系统相结合, 如图 1 所示, 飞秒激光时域热反射系统为扫描近场系统提供外部光路.

图 1 微纳尺度热物性测量系统示意图
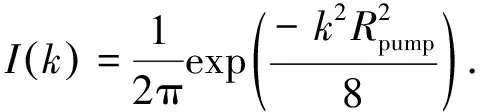
飞秒激光时域热反射系统[23]如图 2 所示. 激光器发出的激光经偏振分束器分成两路, 一路为加热激光, 经过倍频、 调制, 用来加热样品, 一路为探测激光, 经过机械延迟平台用来获得样品时域热响应信号. 两路激光在冷镜处合束, 共同经过近场光学探针光阑孔照射到样品上. 被样品反射的光沿原路返回, 经透镜聚焦到光电探测器上, 光电探测器与锁相放大器相连, 由锁相放大器收集特定的反射信号. CCD相机用来观察样品表面及两路激光光斑的重合程度. 与单波长系统相比, 双波长系统在探测激光进入光电探测器之前, 可利用高选择透过性的滤光片将加热激光彻底滤除, 从而大幅度提高测量信号信噪比, 实现对样品表面反射率变化的更精确测量.
扫描近场系统主要由近场光学探针和小型样品工件台构成. 系统的热物性扫描空间分辨率主要取决于近场探针的孔径及探针针尖与样品间的距离. 为了获得强反射信号, 要求近场光学探针具有高透射率. 具有100 nm光阑孔的光纤探针的透射率一般低于10-4, 因而本系统采用了透射率更高的悬臂梁硅探针, 如图 3 所示. 本实验采用的悬臂梁硅探针光阑孔孔径直径为96.2 nm. 扫描近场技术要求探针与样品间的距离在10几个纳米之内, 近场探针工作于接触或振荡式的非接触状态. 由于探针对加热和探测光的吸收, 导致针尖温度高于样品, 探针接触式热物性测量不仅对样品带来损伤, 也增加了热物性模型的复杂性, 影响表征精度. 因此, 在本实验系统中近场光学探针工作于非接触模式, 可以在离样品几个纳米间距内振荡, 探针和样品相互作用的力很小, 避免了样品损伤, 也避免了探针接触式测量的问题. 小型样品工件台采用压电陶瓷二维扫描, 通过软件控制可实现纳米量级的位置移动. 图 4 展示了微纳尺度热物性测量系统实物图.
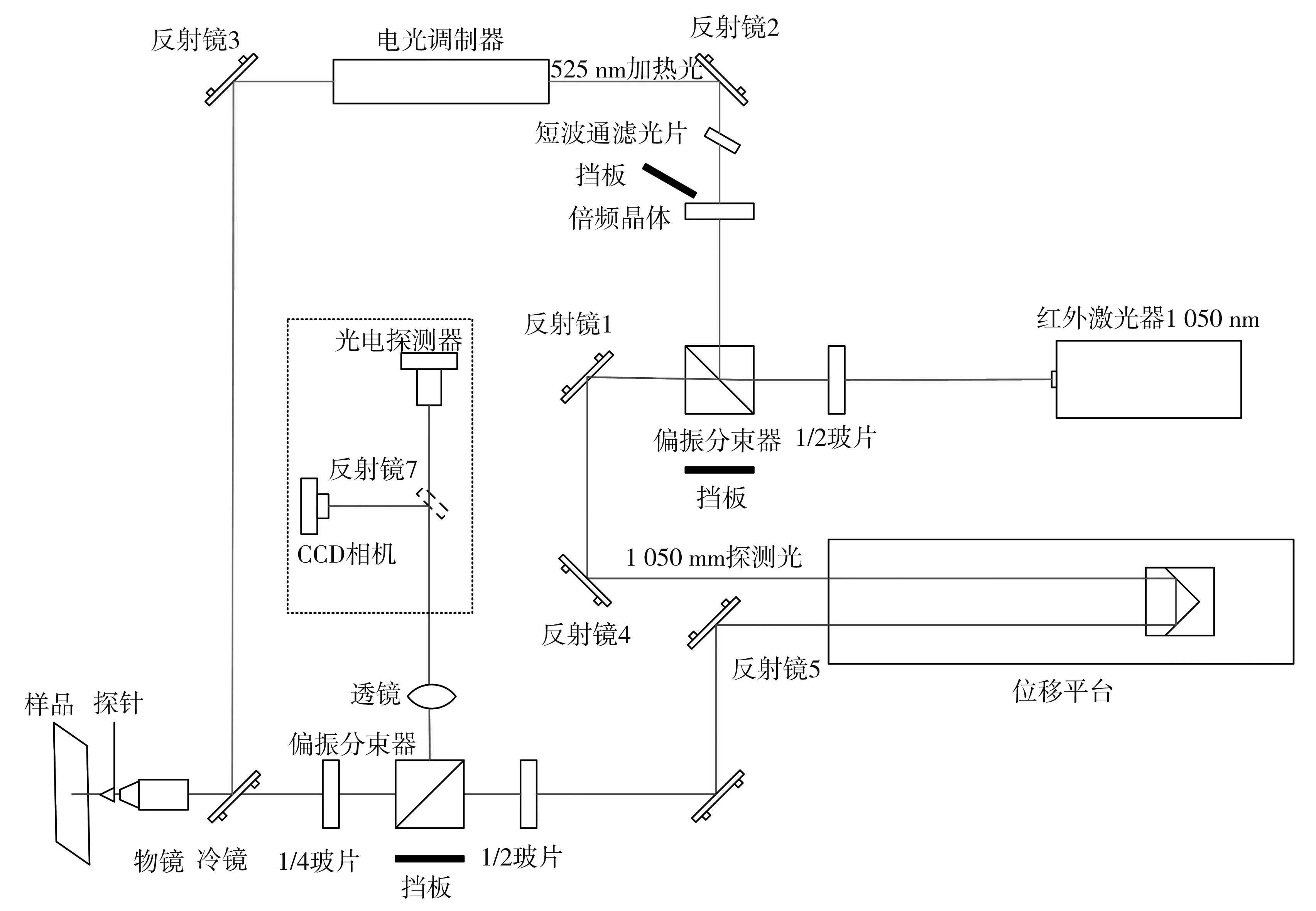
图 2 飞秒激光时域热反射系统光路示意图
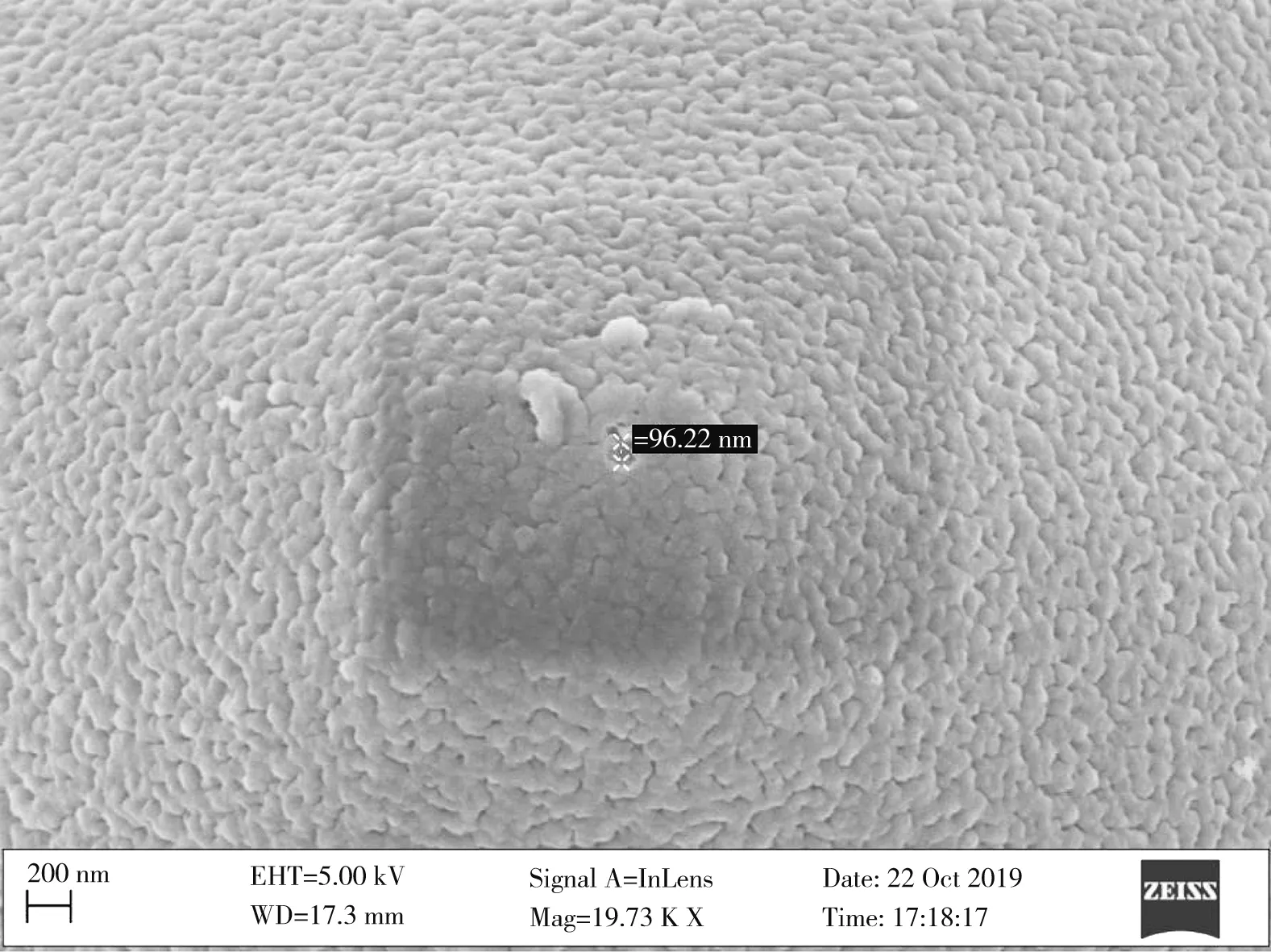
图 3 近场探针尖端SEM照片Fig.3 SEM photo of near-field probe tip

图 4 微纳尺度热物性测量系统实物图Fig.4 Measurement system for micro and nano-scalethermal physical property
2 实验测试和结果
测试样品以Si为衬底, Si衬底上有一层 200 nm 的SiO2薄膜, 最上面镀有一层100 nm的铝膜. 测试样品的电镜图如图 5 所示. 该样品包含了100 nm, 200 nm, 300 nm, 500 nm, 1 000 nm, 2 000 nm, 3 000 nm等宽度不一的条纹结构.
图 5 测试样品的SEM照片Fig.5 SEM photo of the test sample
样品制备的工艺步骤如图 6 所示, 首先对硅片进行预氧化清洗, 去除表面有机物、 过渡金属、 碱性离子和颗粒等杂质, 然后进行热氧化, 在Si衬底上生成200 nm的SiO2薄膜, 按照图 5 所示纳米条纹阵列进行光刻胶涂覆, 采用反应离子刻蚀技术刻蚀掉裸露的SiO2, 并将光刻胶及其他杂质剥离并清洗干净, 最后, 采用磁控溅射在整个样品表面生长出一层100 nm的Al膜.
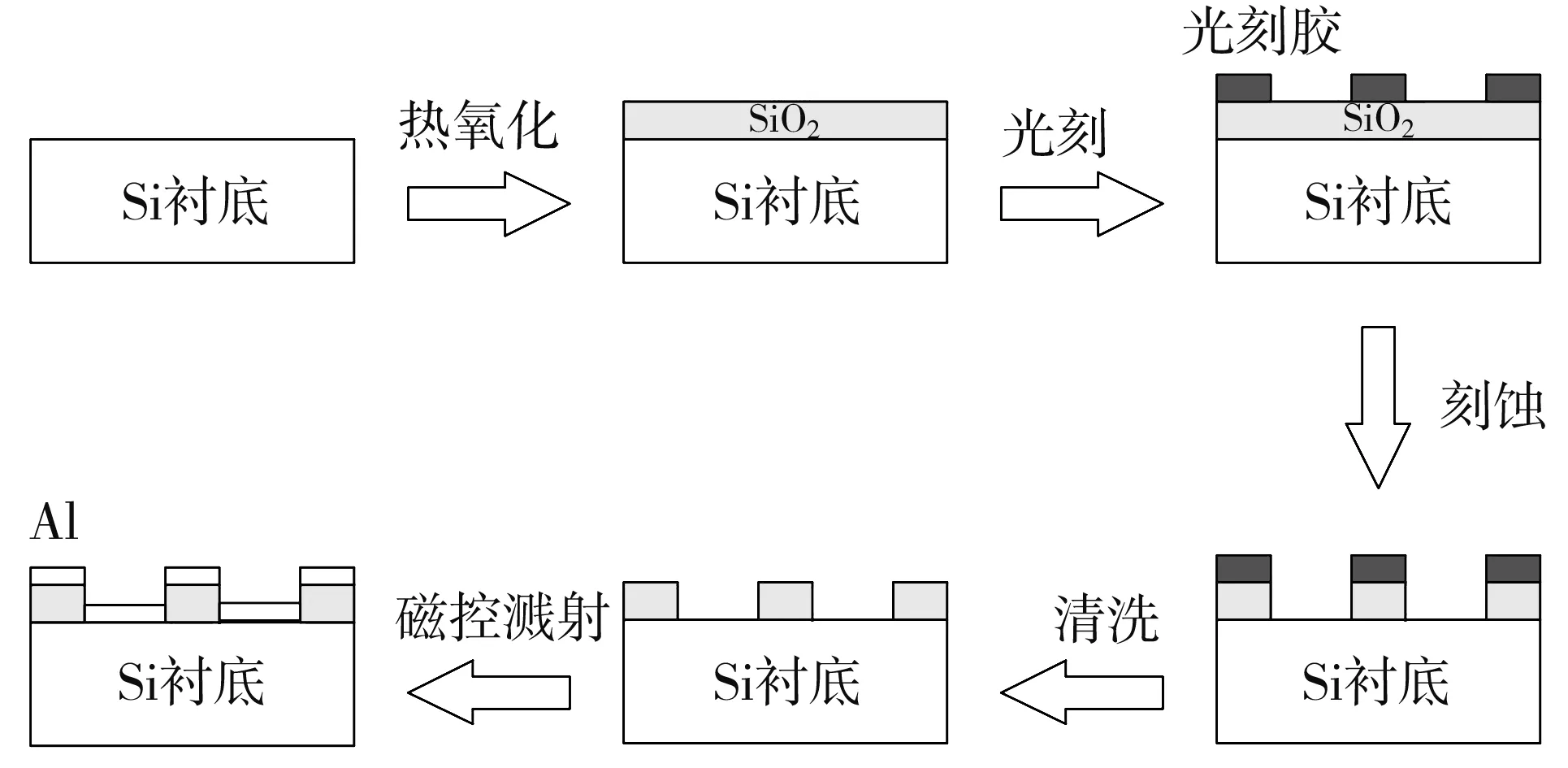
图 6 样品制备工艺流程图Fig.6 Process of sample preparation
如1.1原理部分所述, 在远小于一个波长距离的近场区域, 隐失场可以反映物体的精细结构. 物体结构信息越精细, 则衰减长度越小. 随着探针与探测样品距离的增加, 隐失波迅速衰减.
为了对样品精细结构进行表征, 实现高分辨测试, 测试样品与探针的距离需要控制在近场范围内. 基于扫描探针技术及压电陶瓷精密工件台控制技术[24], 测量系统在Z方向实现了探针-样品间 0.1 nm 的精度位移控制. 为实现不同区域的测试, 通过控制软件和压电陶瓷纳米位移台, 控制样品的移动, 如图 7 所示, 近场探针对样品条纹间隔扫描.
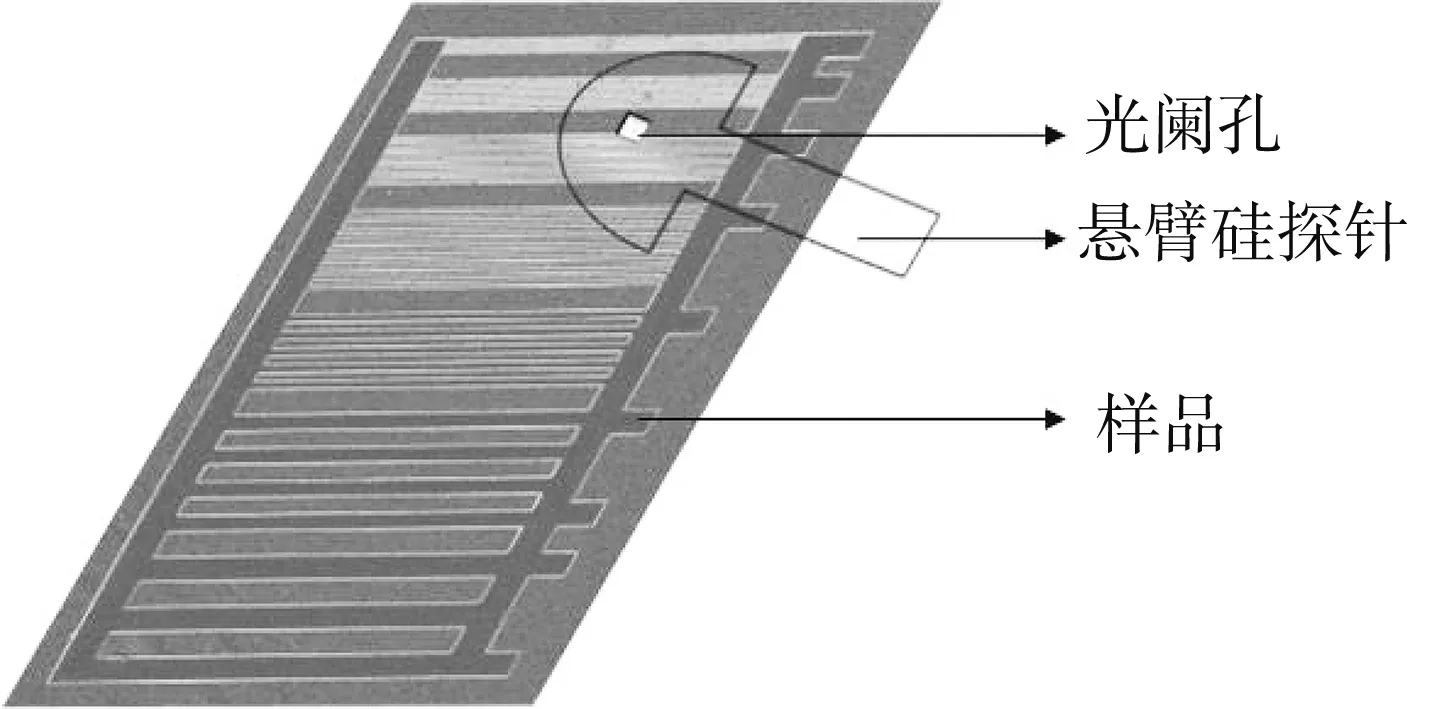
图 7 近场探针扫描示意图Fig.7 Tip scanning over the sample
由于样品光热反射信号的变化非常微弱, 通常在10-4量级, 在扫描测试过程中, 探针与样品间距离经反馈控制维持在恒定值, 经样品反射, 通过探针收集的光信号入射到光电探测器上, 如图 5 所示, 测试样品为尺度不同的条纹微纳结构.
由于纳米结构是凹凸的阵列线条, 当探针扫描时, 如果探测器能区分某个尺度凹凸结构的反射信号, 则达到该尺度空间分辨率.
当近场探针在1 000 nm结构上扫描时, 取扫描频率0.01 Hz, 扫描范围为4个结构, 则三角波幅值为1 000*4*2/2=4 000 nm=4 μm, 即 100 s 内8峰8谷. 在1 000 nm结构上扫描时的反射信号幅值和相位信息如图 8 所示, 可以看出幅值信号跟结构具有很好的一致性.
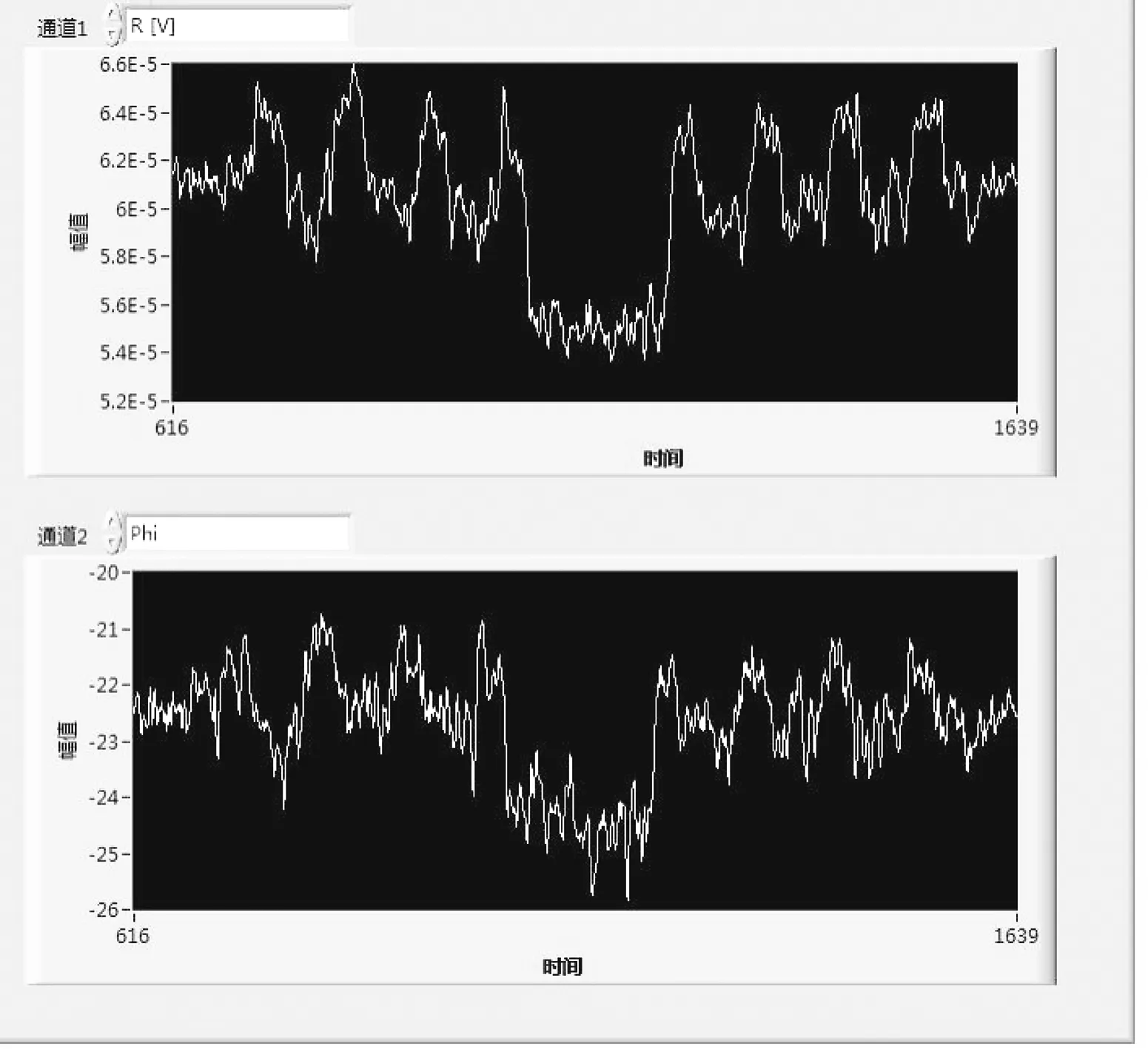
图 8 2 000 nm周期结构上扫描时反射信号幅值和相位信号Fig.8 Amplitude and phase of the reflected signal with tipscanning over a 2 000 nanometer periodic structure
根据2 000 nm周期结构上扫描时反射信号幅值和相位信息可知, 目前微纳尺度热物性测量系统的热物性扫描空间分辨率达到1 000 nm.
为了获得更好的分辨率, 可以从以下方面做深入研究: 制备更优样品、 提升探针透射率、 降低噪声、 提高激光源信号的稳定性、 改善样品结构.
3 结 语
本文所采用的基于近场技术的微纳尺度热物性测量系统, 结合了双色飞秒激光时域热反射系统的高时间分辨率和近场光学技术的高空间分辨率特点, 为进一步测量物体微纳米尺度的热物理性质奠定了更好的基础. 实验表明, 当近场光学探针在1 000 nm条纹间隔扫描时, 幅值信号与样品结构具有良好的一致性, 具有1 000 nm的空间分辨率. 基于近场技术的微纳尺度热物性测量系统将为纳米尺度的热物性测量和研究提供有力方法. 通过改善样品结构, 制备更优探针, 减小背景噪声等措施, 有望将空间分辨率提高至200 nm或更高.
