含附体结构主被动隔振系统的性能分析
2022-02-15米泽宁孙红灵孙陆阳
米泽宁,孙红灵,孙陆阳
(1.中国科学院噪声与振动重点实验室(声学研究所),北京 100190;2.中国科学院大学物理学院,北京 100049)
引 言
隔振系统被广泛应用于工程中,对其隔振特性的研究也比较多[1-4]。然而,实际的系统往往是多振动传递路径系统,设备会与许多附件(如管路、电缆等)相连接,设备振动产生的力除了通过隔振器传入基础外,还会通过附体结构直接传到基础,此时对隔振性能的分析应该考虑到附体结构的影响。
目前已有一些学者开展了附体结构对隔振性能的影响研究:高锋[5]在泵动力学和流场分析的基础上,分析了管道和柱塞泵的振动耦合,并据此对附加管路的柱塞泵系统的减振设计提出了一些方法;徐时吟[6]采用扩展的子结构建模方法对附连设备的舱筏隔振系统进行了精细化建模,阐述了附体结构在系统中的耦合机制,就附体结构对系统振动传递的影响进行了参数分析,得出了附体结构会削弱系统隔振性能的结论;何春雨等[7]采用有限元法建立了船舶海水管路系统中泵组-隔振器-挠性接管-管路附件系统的计算模型,通过数值计算分析了该多传递路径系统的力传递特性,讨论了挠性接管刚度和管路系统的固有频率对振动传递的影响;唐春仁等[8]采用实验的方法,分析了离心泵系统中管路对水泵的低频隔振效果影响。上述工作多是针对实际工程结构,采用有限元等数值方法仿真或实验进行分析,目前尚缺乏附体结构对隔振性能影响的系统性、规律性的分析。
除此之外,随着减振水平的提高,单纯采用被动隔振难以在低频时取得满足工程应用需求的效果,因此国内外开展了大量的主被动复合隔振系统研究。Jenkins 等[9]采用功率流作为控制函数对浮筏隔振系统的主动控制进行了理论和实验的研究;Howard 等[10]以传递到圆柱壳体的功率流最小为优化目标,研究了主动控制对刚体机组-多个隔振器-圆柱壳系统隔振效果的影响;孙红灵[11]分析了单双层以及浮筏隔振系统中不同作动器安装方式下有源隔振所需控制力。对于含附体结构隔振系统,含有多个振动传递路径,有源控制中作动器的布放位置选择比较复杂,因此探讨不同控制位置对于系统隔振性能的影响对于实际系统设计具有重要意义。
为规律性、系统性地研究多振动传递路径系统中附体结构对隔振性能的影响及振动传递的物理特性,并探究有源控制中作动器位置对隔振效果的影响,本文提出了一种附加弹簧的双层主被动隔振系统模型,在双层隔振系统的基础上,增加了一个将设备与基础直接相连的附加弹簧作为简化的附体结构,使用集中参数系统进行分析,研究附体刚度、阻尼等参数以及有源控制中作动器位置对隔振性能的影响。该系统具有结构形式简单、代表性强并且可解析计算的特点,通过对该系统的分析,可以得到一系列规律性、理论性的结论,有助于实际隔振系统的设计。
本文首先研究刚性基础的情况,分析了系统参数对系统力传递率的影响。之后研究了弹性梁作为基础的情况,选用梁的总动能作为性能指标分析了隔振系统、附体结构和弹性梁的参数对隔振性能的影响。在有源控制方面,针对刚性和弹性基础两种情况,分别分析了有源控制作动器的位置对系统隔振性能的影响。
1 刚性基础情况
1.1 理论建模
先考虑基础为刚性的情况。图1所示系统中,Me为设备质量,Kei和Cei为上层隔振器的刚度和阻尼,Mm为中间质量,Kmi和Cmi为下层隔振器的刚度和阻尼,K2和C2为附加弹簧的刚度和阻尼,fs为设备产生的扰动力,f1为设备扰动力经过附加弹簧直接传到基础的力,f2为扰动力经过双层隔振系统之后传到基础的力。将该系统视为集中参数系统,则传递到基础上的总力为两个路径传递力之和,即fb=f1+f2。选取力传递率作为评价隔振效果的性能指标。
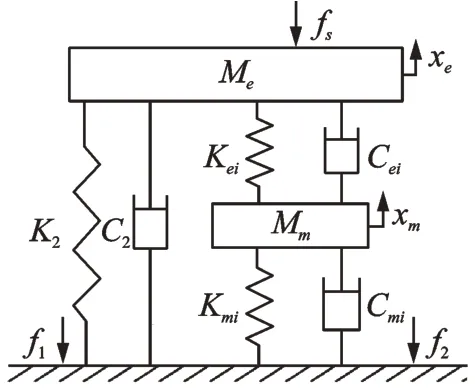
图1 附加弹簧的双层隔振系统(刚性基础)Fig.1 Double-layer vibration isolation system with attached spring(rigid foundation)
在圆频率ω=2πf的简谐扰动力下,定义各部分的阻抗分别为:设备阻抗Ze=−ω2Me,上层隔振器阻抗Zei=Kei+jωCei,中间质量阻抗Zm=−ω2Mm,下层隔振器阻抗Zmi=Kmi+jωCmi,附加弹簧阻尼系统阻抗Z2=K2+jωC2。
系统的动力学方程如下:
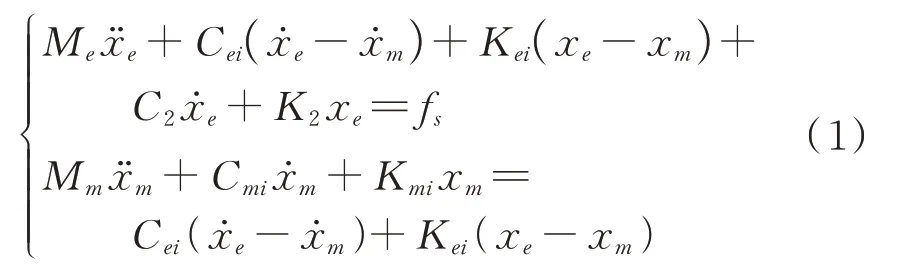
式中xe和xm分别为设备和中间质量的位移。
在简谐扰动下,式(1)可化简为如下表达式:
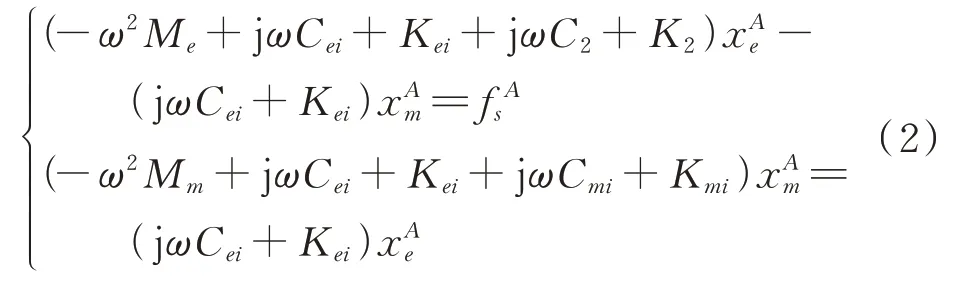
式中 上标“A”表示幅值。
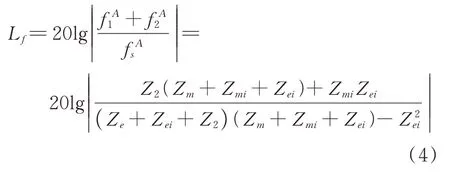
由式(2)可推得中间质量与设备的振级落差为:

根据阻抗与力和速度的关系,有fA1=Z2xAm和f2A=Zmi xAe,联立式(2)和(3),可得该系统的力传递率表达式为:
1.2 附加弹簧参数影响分析
在上节所讨论系统中,取设备质量Me=100 kg,中间质量Mm=80 kg,上层隔振器弹簧刚度Kei=9.870×104N/m,下层隔振器弹簧刚度Kmi=3.158×105N/m。
从式(4)可知,力传递率与附加弹簧的刚度和阻尼有关,为分析弹簧刚度和阻尼对力传递率的影响,定义附加弹簧刚度比为λ=K2/Kei,阻尼比为ξ2=,取不同的λ和ξ2,数值计算力传递率随频率的变化情况如图2所示。
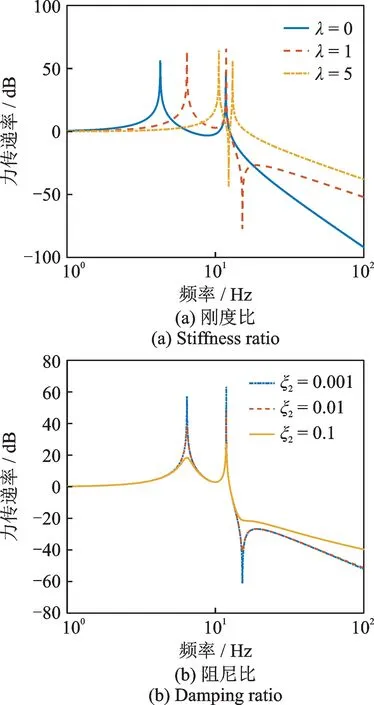
图2 不同附加弹簧的刚度比和阻尼比情况下力传递率随频率变化曲线Fig.2 The curves of force transmissibility with frequency under different stiffness ratios and damping ratios of additional springs
如图2(a)所示,相比于一般的双层隔振系统,附加弹簧后的系统在中高频上的力传递率显著升高,隔振性能下降。而在低频时相比于不附加弹簧时,除了两个耦合共振峰外,力传递率还会出现一个极小值(谷值)。
如图2(b)所示,系统的阻尼对共振频率和极小值(谷值)对应频率没有影响,但是会影响峰值和谷值的大小从而影响力传递率曲线的形状。
1.3 力传递率峰谷值分析
如图2(a)所示,当λ=0 时,相当于附加弹簧不存在,此时系统为经典的双层隔振系统,力传递率曲线有两个共振峰,对应的是系统的两个耦合共振频率[12]。当存在附加弹簧时,力传递率曲线除了两个共振峰外,还存在一个谷值(极小值)。为进一步分析该现象,连续改变λ的取值,可得图3。
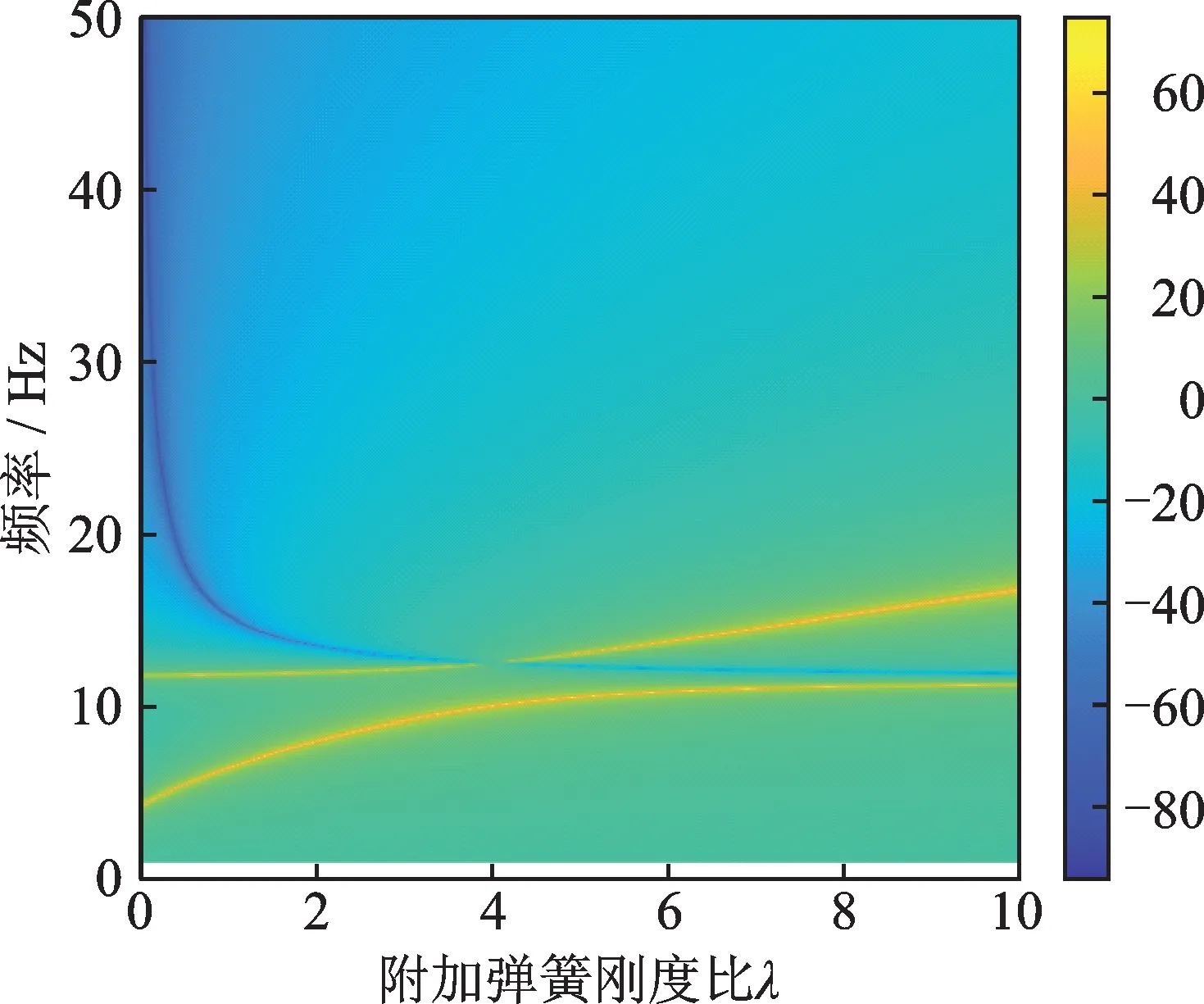
图3 力传递率随弹簧刚度比和频率的变化图像Fig.3 Image of force transmission rate with spring stiffness ratio and frequency
图3中,颜色深浅表示力传递率的大小,单位为分贝(dB)。因此在图中,黄色区域为峰值,深蓝色区域为谷值。如图3所示,在一个固定的λ处,力传递率随着频率的变化有两个峰值和一个谷值,且随着λ的升高,峰值对应的频率逐渐升高,而谷值对应的频率逐渐降低。
力传递率的两个峰值对应的频率即为整个振动系统的耦合共振频率。根据振动的模态理论,当外力的频率在共振频率附近时,系统的受迫振动就很接近对应的模态,从而产生共振。此时两质点角频率相同均为共振频率,设为ωg。由此可解得耦合系统的两个共振角频率为:

由于附加弹簧的存在,在系统阻尼较小的情况下力传递率曲线在低频时存在一个较为明显的谷值,此时传递到的基础力很小,几乎为0,对应力传递率的极小值。根据式(4),在力传递率极小值所对应的频率处,有Z2(Zm+Zmi+Zei)+ZmiZei=0,由此解得该频率为:

式中ωbm=为下层弹簧和中间质量构成子系统的固有频率,ωem=为上层弹簧与中间质量构成子系统的固有频率。从式(6)可以看出,当附加弹簧刚度K2增大,即λ增大时,谷值对应频率会减小。
对于附加弹簧的双层隔振系统的力传递率曲线在低频时产生的一个谷值,可以从数学意义和物理意义两个角度给予解释。从数学角度,经典双层隔振系统的力传递率为:

当式(7)分母部分为零时,对应的是两个共振峰的位置,其解即为系统的两个耦合共振频率。式(7)分子部分在阻尼比较小的情况下,近似为一个常数,因此力传递率不存在极小值,是平滑下降的,与频率相关的变化体现在分母上。对于附加弹簧的双层隔振系统,其力传递率的分子为零时表现为一个极小值,即力传递率曲线的谷值。
从物理角度,对于附加弹簧的系统,传递到基础的力除了下层弹簧的力外,还有附加弹簧直接传递到基础的力。将该系统视为集中参数系统,两个弹簧阻尼系统传递到基础的力作用在一个点上,因此总的传递到基础上的力应为两个弹簧力的加和。此时,传递到基础的力不仅与中间质量的位移有关,还与设备的位移响应有关。取λ=1,则在低阻尼情况下,近似认为Zmi=Z2,则传递到基础的力与两个质量的位移之和成正比。此时两个质量的位移响应及其加和如图4所示。
根据图4,设备和中间质量位移响应的方向如表1所示。在表1中,f1g和f2g为系统的第一和第二共振频率,正负号表示设备和中间质量位移响应的方向。从表1可知,在频率高于第二个共振频率之后,设备与中间质量反向振动,此时fA1与fA2方向相反,两者相互抵消,对应到力传递率曲线即为过了第二个共振峰后,力传递率迅速下降至一个极小值。随后设备和中间质量的位移大小都快速下降到一个较小的值,而由于两者质量不同,两者位移响应的下降速度略有不同,体现在力传递率曲线上即为过了谷值后先上升一段随后缓慢下降。高频时位移响应的下降速度与无附加弹簧时相近。
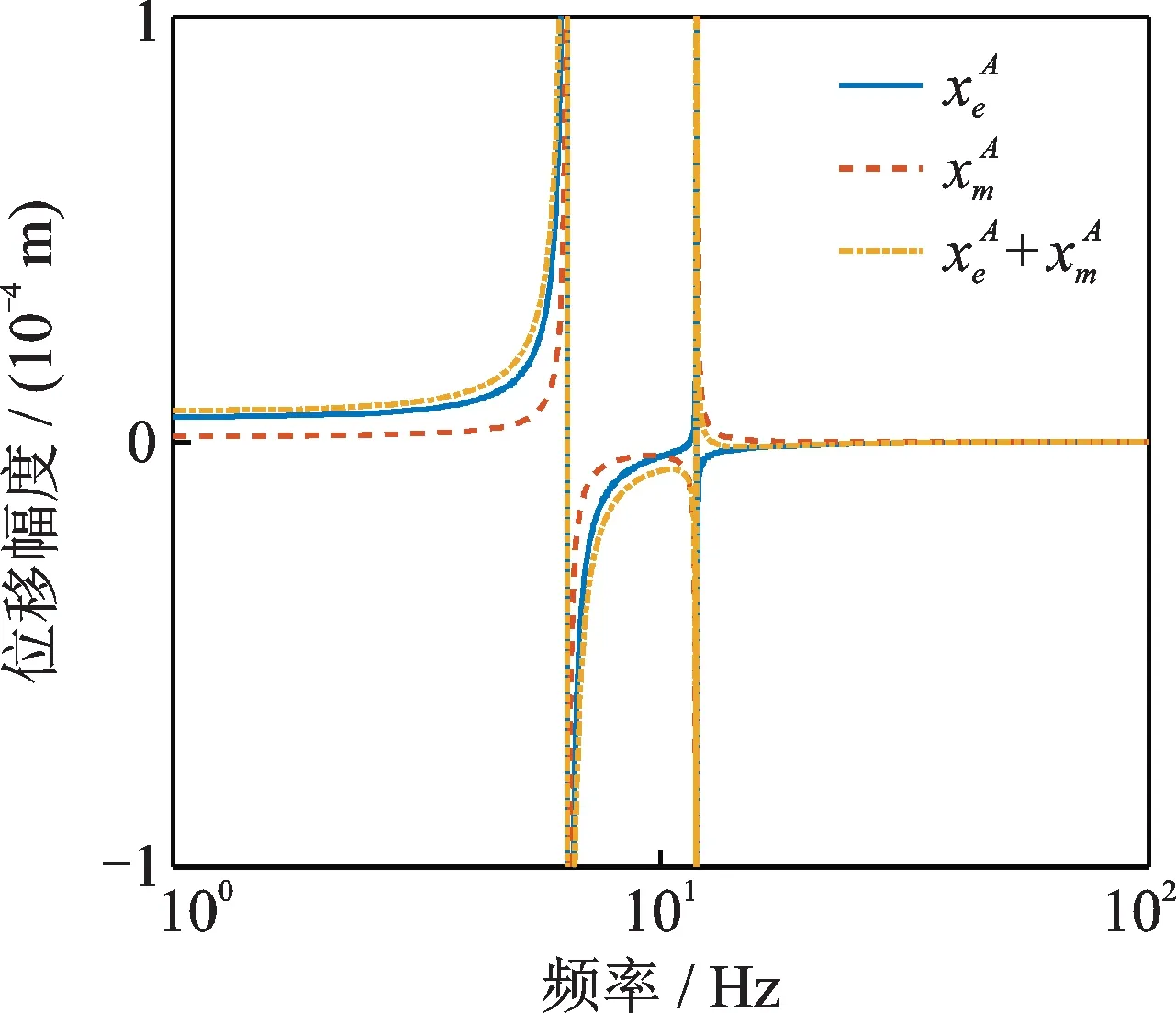
图4 设备和中间质量的位移响应及其加和Fig.4 Displacement response and summation of equipment and intermediate mass
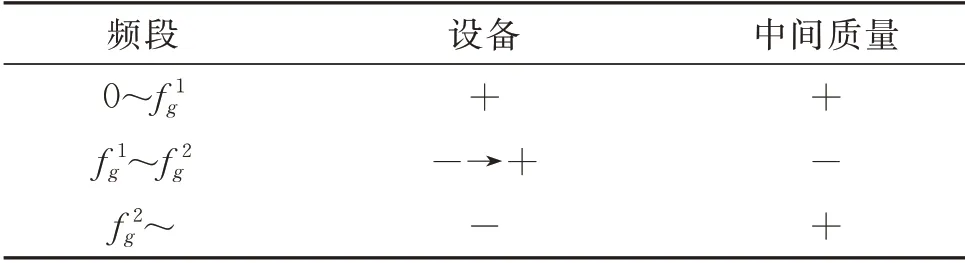
表1 设备和中间质量位移响应方向Tab.1 Equipment and intermediate mass displacement response direction
除此之外,在图3中还可看到,在所取参数情况下,当刚度比λ=4 时,第二共振峰和谷值曲线有重合部分,体现在力传递率曲线上即为只有第一个峰值,没有第二个峰值和谷值,其机理可作如下解释:在低阻尼情况下,力传递率式(4)的峰值和谷值取决于其零点和极点,极点对应共振峰频率,零点对应谷值频率,分别在式(5)和(6)中计算给出。从两式中可看出,当λ增大时,两个共振峰对应的频率逐渐增大,而谷值对应的频率逐渐减小。随着λ从零开始逐渐增大到某个值时,会存在第二个共振峰对应频率与谷值对应频率相等的情况,即在所取参数下λ=4 时对应的情况,此时有ωL=ω(2)g,力传递率表达式(4)中的零点与一个极点相消,此时力传递率曲线只有一个峰值,表现出与单层隔振系统类似的特性。
1.4 有源控制作用点对隔振性能的影响
对于图1所示系统,有源控制作用点(作动器布放位置)有如图5所示的六种情况:①置于设备上;②与上层隔振器并联;③置于中间质量上;④与下层隔振器并联;⑤与附加弹簧阻尼系统并联;⑥置于基础上。设所需作动力为FA,对各情况分析如下:

图5 有源控制作动器布放位置Fig.5 Active control actuator placement position
①当作用点位于设备上时,控制目标函数为设备位移为零:xAe=0,理想情况下传递到基础的力为零:fA1=fA2=0,所需有源控制力为扰动力:FA=fAs。
②当作动器与上层隔振器并联时,有源控制力与隔振器上的力完全抵消,相当于上层隔振器被“断路”的情况,系统的运动方程、传递到基础的力和有源控制力分别为:
③当作用点置于中间质量上时,目标函数为中间质量位移为零:xAm=0,在控制下系统的运动方程、传递到基础的力和有源控制力为:
④当作动器与下层隔振器并联时,与情况②类似,在式(1)中取Kmi=Cmi=0,可得运动方程:

传递到基础的力与有源控制力为:
⑤当作动器与附加弹簧阻尼系统并联时,同理在式(1)中取K2=C2=0,此时系统为一般的双层隔振系统,传递到基础的力和有源控制力为:
⑥当作用点置于基础上时,有源控制力与传递到基础上的力抵消,因此传到基础上的力为0,所需的有源控制力即为fb=f1+f2,根据式(4)即可得出。
根据上述分析可得图6和7,其中图6为不同控制情况下系统力传递率曲线,图7为不同控制位置所需有源控制力与扰动力的比值曲线。根据图6和7 可得出不同频段各控制位置的力传递率和所需有源控制力的比较,总结如表2所示,其中低频段代表各曲线峰谷值之前的平坦频段,高频段代表峰谷值之后的有效隔振频段,中频段则代表含有峰谷值的中间部分的频段。根据图6,7 和表2,可以得出如下结论:
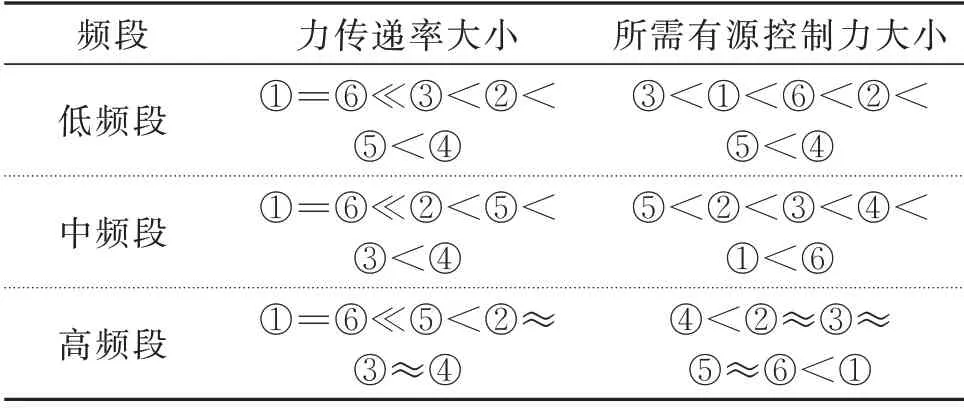
表2 不同频段各有源控制位置力传递率和所需有源控制力大小比较(刚性基础)Tab.2 Comparison of the force transfer rate and the re⁃quired active control force of each active control position in different frequency band(rigid founda⁃tion)

图6 不同有源控制情况下系统力传递率曲线Fig.6 System force transmissibility curves under different active control conditions
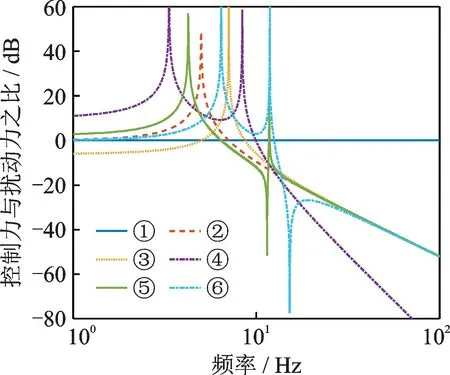
图7 不同有源控制位置所需有源控制力与扰动力比值Fig.7 System force transfer rate curves under different active control conditions
对于①⑥两种情况,均可使传递到基础上的力为零,其中①所需控制力为设备扰动力,在中高频时所需的有源控制力较大,而⑥所需控制力在低频时高于①且在系统的两个耦合共振频率处存在极大值,但在中高频有效减振频带上远小于①所需控制力。
对于②~⑤四种情况,都相当于只控制了其中一条传递路径,并不能达到最好的隔振效果。其中②③④三种情况相当于阻断了双层隔振系统这一传递路径,而⑤相当于阻断了附加弹簧这一传递路径。由图6可得,情况⑤在中高频的力传递率明显低于②③④三种情况,说明在中高频段系统振动传递的主要路径为附加弹簧。在低频段时,有源控制力的加入会改变系统的耦合共振频率,并且会在一定程度上降低两共振频率之间的力传递率。其中情况③在共振频率之前具有比其他情况更好的控制效果。情况④会使力传递率曲线出现一个谷值,这是因为控制下层弹簧时,中间质量与上层弹簧相当于一个动力吸振器,因此在其固有频率处会具有很高的隔振效果。
由图7可知,在低频时,除情况③所需控制力略低于扰动力外,②④⑤三种情况所需控制力均大于扰动力,且存在峰谷值。在中高频时,情况②③⑤所需控制力与直接控制基础时相同,而情况④所需控制力较低。
由以上分析可知,对于多传递路径的系统,在有源控制设计中应根据需要控制的频段选择合适的控制位置,并且需考虑到附体结构,对多个传递路径同时控制,以便在较低的控制力下达到最优的隔振效果。
2 弹性基础情况
2.1 理论建模
为研究更符合实际情况的情形,将该附加弹簧的双层隔振系统置于两端固定的弹性梁基础上,选取单位激励力下弹性梁的总动能作为隔振性能指标,研究该系统隔振特性,如图8所示。其中弹性梁两端固定,梁的长度为l,质量为Mb,质量分布视为均匀的。隔振系统的参数与1.1 节一致。
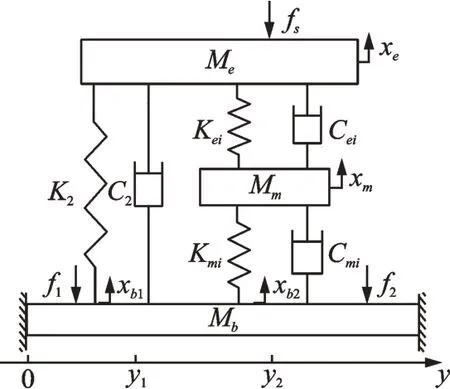
图8 弹性梁基础的附加弹簧双层隔振系统Fig.8 Additional spring double-layer vibration isolation system on elastic beam foundation
隔振系统在基础梁上两个作用点的位置分别为y1和y2,设设备、中间质量和两个力作用点处梁的垂向位移分别为xe,xm,xb1,xb2。则根据1.1 节各部分阻抗的定义,系统在简谐扰动力下的运动方程为:

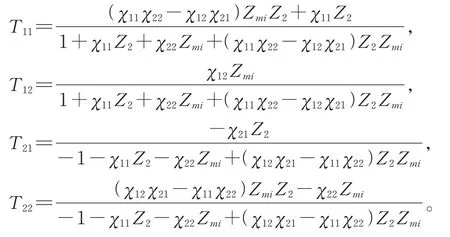
梁上两点的导纳关系为:

其中,X1,X2为梁上两点位移;F1,F2为两点的作用力,梁上两点间的转移导纳为[12]:

式中ωbk为基础梁的第k阶固有频率,ϕk(⋅)为梁的第k阶振型函数,δ为梁的损耗因子。梁的第k阶固有频率表达式为:

式中K为回转半径,是一个与梁几何尺寸有关的常数,c=,E为杨氏模量,ρ为材料密度,μk为梁的频率方程coshμkcosμk=1 的解。
由式(15)可得,梁上两个力作用点的垂向位移为:

根据胡克定律,梁上的两个作用力分别为:

将式(20)代入式(18)和(19),联立可解得梁上两作用点位移与设备和中间质量位移的关系:

式中
将式(21)代入运动方程式(13)和(14),可得中间质量和设备的振级落差以及设备位移与扰动力关系:

将式(21)~(23)代入式(20),即可得到梁上两个作用力为:

由式(15)可得梁上任一点y3的振速幅值为:

则梁的总动能为:
在式(26)中,χ31,χ32由式(16)给出,fA1,fA2由式(24)给出。
2.2 系统参数影响分析
取Mb=200 kg,梁的杨氏模量E=3.2×1011Pa,弹性梁上两个力作用点分别位于y1=0.25 m,y2=0.75 m,其他系统参数均与刚性基础情况一致。将单位作用力激励情况下弹性梁的总动能作为隔振性能的评价指标,以附加弹簧刚度比λ=1为例,可得图9所示曲线。
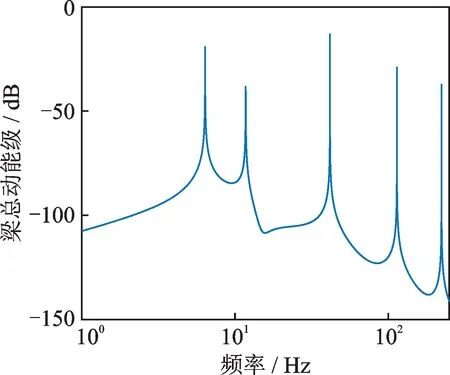
图9 弹性梁基础的总动能级随频率变化曲线Fig.9 Curve of total kinetic energy level of elastic beam foundation varies with frequency
由图9可知,弹性梁基础时梁的总动能级曲线在低频时存在两个共振峰和一个谷点,与刚性基础时相同,这是由附加弹簧和双层隔振系统的耦合造成的;除此之外,在中高频时还出现了一系列共振峰,将所取参数代入式(17),可以计算得到弹性梁的各阶固有频率,其中前3 阶固有频率分别为:41.12,113.33 和222.21 Hz,将图9中的中高频共振频率与梁的固有频率进行对比,可以发现这些共振频率即为梁的不同阶固有频率,峰值对应的是弹性梁不同的固有模态。
为探讨附加弹簧刚度、附加弹簧阻尼、基础梁刚度以及力作用点位置等参数对隔振性能的影响,分别改变上述参数的取值,得到图10和11 所示曲线(其中由式(17),选取梁的杨氏模量作为分析基础梁刚度的参数)。
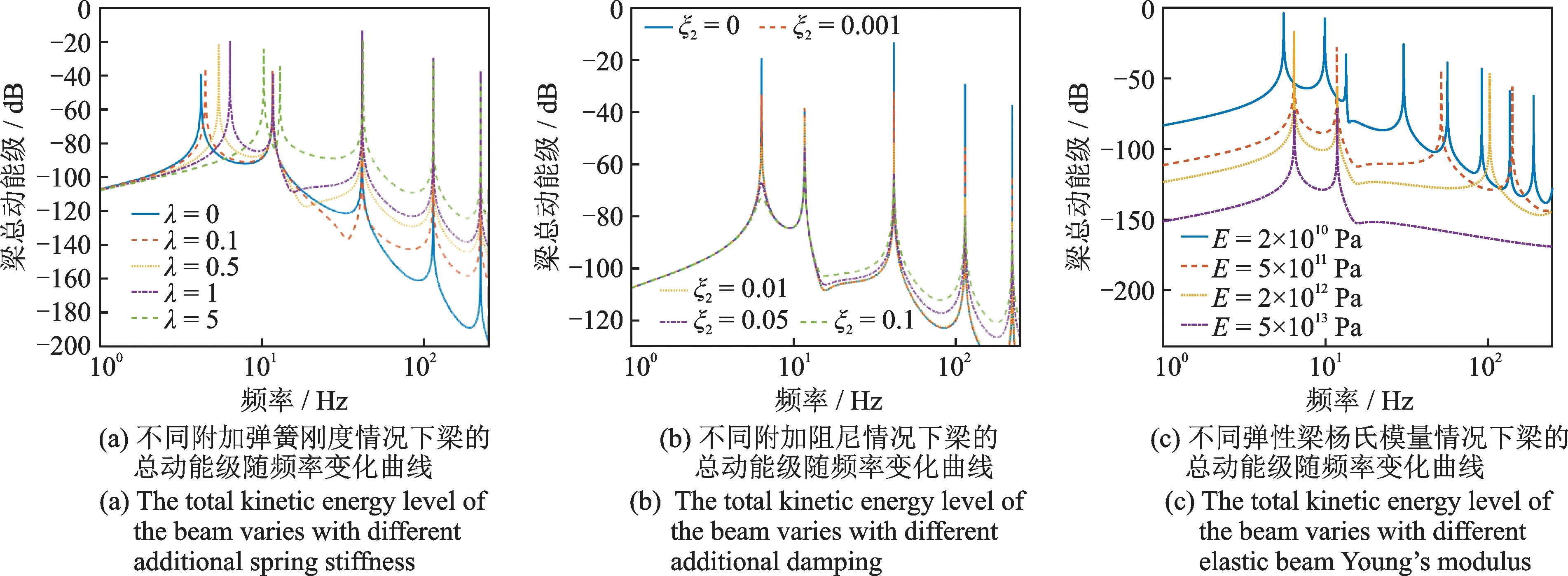
图10 不同系统参数下梁的总动能级随频率变化曲线Fig.10 The total kinetic energy level of the beam varies with different system parameters
由图10(a)可得,附加弹簧刚度对梁总动能曲线的主要影响在于低频时的两个耦合共振峰,中高频的共振峰位置取决于梁的固有模态,与附加弹簧刚度无关。但随着附加弹簧刚度的增大,梁的总动能(级)逐渐增大,隔振性能逐渐变差,与1.2 节刚性基础的情况相同。
由图10(b)可得,附加弹簧的阻尼对于双层隔振系统的耦合共振频率和中高频弹性梁的固有频率均无影响,只是会影响振动幅值。随着附加弹簧阻尼的增大,低频的两个共振峰峰值逐渐降低,中高频时弹性梁的总动能逐渐增大,隔振性能变差。
由图10(c)可得,弹性梁的刚度并不会影响低频的两个共振频率,这是由于低频的两个共振频率主要是由双层隔振系统的耦合特性决定的(见1.3节的分析)。而中高频的共振峰主要是由于弹性梁的固有模态引起的,且随着弹性梁杨氏模量的增大,弹性梁固有频率之间的间隔逐渐增大。弹性梁的刚性越小,相同振源引起的振动越大,对隔振性能的要求越高。
图11为固定双层隔振作用点位置y2=0.75 m,改变附加弹簧作用点位置y1时梁的总动能级曲线的变化情况。
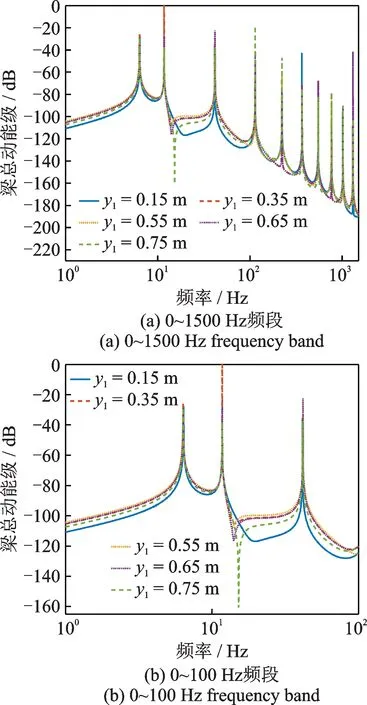
图11 固定y2=0.75 m,改变y1时梁的总动能随频率变化曲线Fig.11 The curve of the total kinetic energy level of the beam varies with frequency when fixing y2=0.75 m and changing y1
由图11(a)可得,当固定双层隔振作用点y2=0.75 m 时,随着附加弹簧作用点y1从左到右变化,梁总动能曲线在中高频上各共振峰没有变化,仍为梁的各个固有频率;而共振峰的高度和各共振频率之间的曲线会随着两个作用点距离的变化有一些微小的差别。由图11(b)可得,在低频处主要差别在于反共振点的位置和谷值:随着y1从左到右变化,反共振点对应的频率由低到高变化,而反共振点对应的谷值逐渐增大,在两作用点重合时达到最大。
由此可知,两作用点的距离主要影响的是低频时的反共振点。两作用点距离越远,反共振点越不明显,且其对应的反共振频率也越低;而两作用点距离越近,反共振点越明显,且对应的反共振频率越高:当两作用点重合时,反共振点最为明显,且对应的反共振频率也最高。
为验证理论建模的正确性,采用了有限元仿真方法进行验证。建立了二维梁的有限元模型,得到单位激励力下梁的总动能级随频率变化曲线(以λ=1 为例),将其与理论建模获得的曲线图9进行对比,如图12所示。可见理论建模结果与有限元仿真结果符合较好,仅在峰值处有微小差距,误差主要来源于梁上两点间转移导纳式(16)的截断误差和梁固有频率式(17)计算中解频率方程时的近似。由此可验证理论建模是准确的。
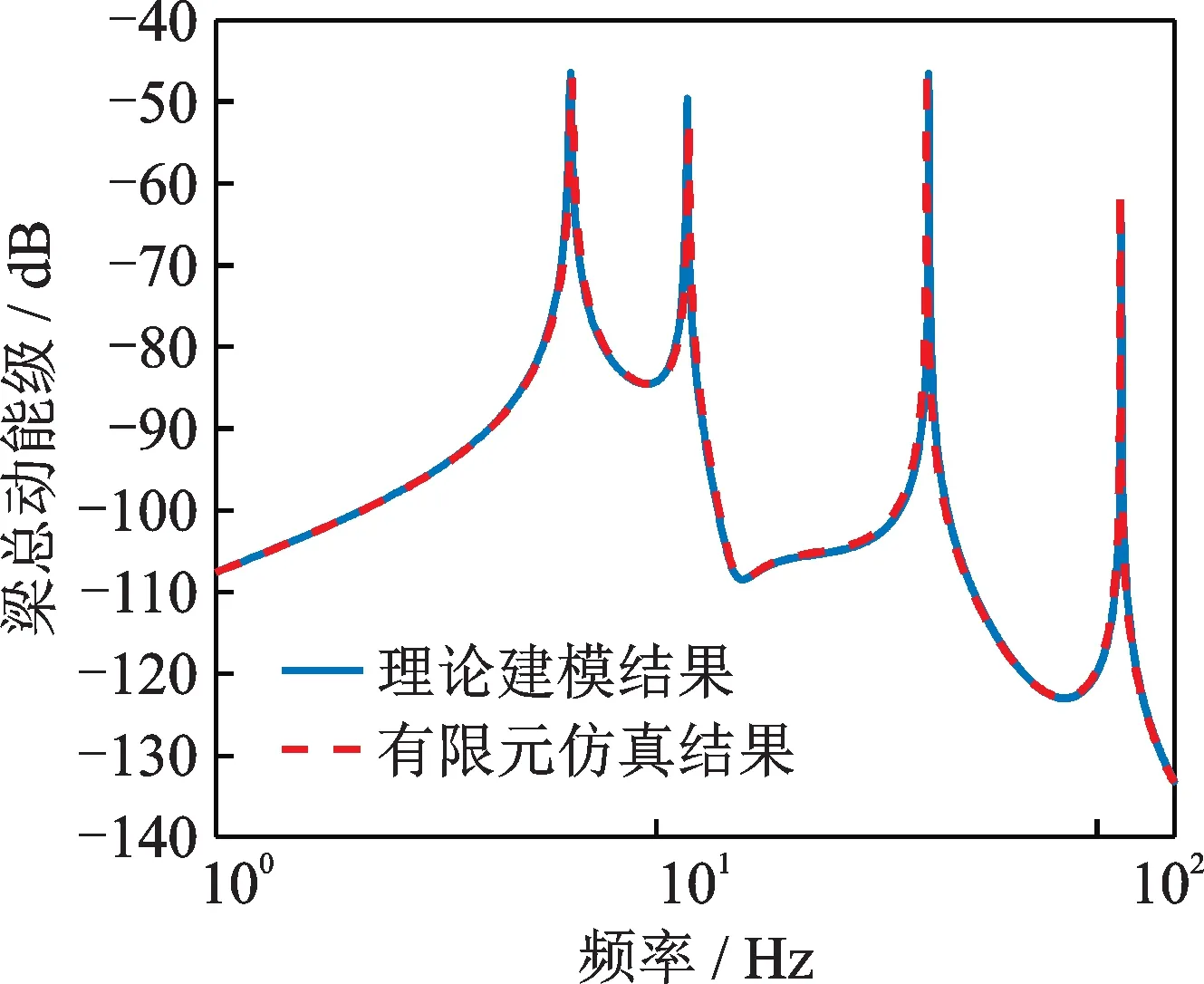
图12 弹性梁基础情况理论建模与有限元仿真结果对比(λ=1)Fig.12 Comparison of theoretical modeling and finite element simulation results of elastic beam foundation(λ=1)
2.3 有源控制作用点对隔振性能的影响
对于图8所示系统,有源控制作用点(作动器布放位置)有如图13所示的八种情况:①置于设备上;②与上层隔振器并联;③置于中间质量上;④与下层隔振器并联;⑤与附加弹簧阻尼系统并联;⑥置于下层弹簧和基础梁连接处;⑦置于附加弹簧和基础梁连接处。⑧同时控制基础梁上两个弹簧与基础连接点。设所需作动力为FA,对各情况分析如下:

图13 弹性梁基础情况有源控制作动器布放位置Fig.13 Position of active control actuator of elastic beam foundation condition
对于情况①,作用点位于设备上,控制目标为使设备位移为零,即xAe=0。理想控制的情况下,传递到基础梁的力f1A=f2A=0,所需有源控制力为扰动力FA=fsA。
对于情况②④⑤,作动器与隔振器或弹簧阻尼系统并联,有源控制力与隔振器上或弹簧阻尼系统上的力完全抵消,相当于隔振器或弹簧阻尼系统被“断路”。因此分别将Zei=0,Zmi=0,Z2=0 代入式(24)即可得传递到基础梁的力。
对于情况③,作用点置于中间质量时,运动方程式(13)和(14)中取xAm=0,可解得:
传递到基础梁的力和有源控制力为:

对于情况⑥,当作用点位于下层弹簧和基础梁连接处时,控制目标为xAb2=0,此时运动方程为:

根据导纳关系:
由式(31)可得:
联立式(30),(32)和(20a),可得:
将式(33)代入运动方程式(29),可得:

故传递到基础的力和有源控制力为:
情况⑦采用与情况⑥相同的方法,控制目标为=0,得到:

值得注意的是,情况⑤和⑦虽然都为控制附加弹簧所在路径,但控制目标不同。情况⑤的控制目标为使传递到连接点的力为零,而情况⑦的控制目标为使连接点响应为零。因此情况⑦中传递到连接点的力fA1并不为零,其在数值上等于该点处梁中的剪切力。
对于情况⑧,同时控制基础上两个弹簧连接点,控制目标为xAb1=xAb2=0,此时相当于刚性基础的情况。传递到基础上的力为零,梁不发生振动,总动能为零。附加弹簧连接点和下层弹簧连接点所需的有源控制力分别为:
根据以上分析可得图14和15 以及表3。根据图14,15 和表3,可以得出如下结论:
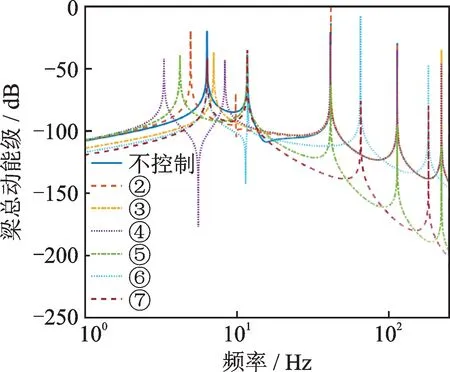
图14 弹性梁基础下不同有源控制情况下梁总动能级曲线Fig.14 Curve of total kinetic energy level of beam under different active control conditions under elastic beam foundation

表3 不同频段各有源控制位置梁总动能级和所需有源控制力大小比较(弹性梁基础)Tab.3 Comparison of the total kinetic energy level and required active control forces of each active con⁃trol position in different frequency band(elastic beam foundation)
与刚性基础情况相同,情况②~⑦都相当于只控制了一条传递路径,因此都不能达到最佳的隔振效果;而情况⑧相当于同时控制两条传递路径,可以完全阻隔振动传递到基础梁。情况②~⑤在低频时对隔振性能的影响与1.4 节刚性基础情况相同。情况③⑥⑦相比于其他情况具有更好的低频隔振性能。
由于中高频时振动的主要传递路径为附加弹簧,因此情况⑤和⑦在中高频时能显著降低梁的总动能级,而其他位置在中高频段并不能有效降低梁总动能级。除此之外,情况⑥和⑦相当于对弹性梁附加了简支约束,因此会改变梁振动的固有模态,从而会改变梁总动能级曲线中高频时的共振频率,并且增大了弹性梁在该频段的总动能,降低了该频段的隔振性能。
在有源控制力方面,由图15(其中,⑧1 代表同时控制时附加弹簧连接点控制力,⑧2 代表同时控制时下层隔振器连接点控制力控制力),采取情况②④⑤在低频时所需的控制力均高于扰动力,而情况③⑥⑦除在低频共振峰附近外,所需控制力均略低于扰动力。各控制情况在中高频除前几阶梁固有频率外,所需控制力均低于扰动力,由于附加弹簧是中高频振动和能量的主要传递路径,因此⑤⑦两种情况在中高频时所需的控制力高于其他几种情况。情况⑧所需的两个控制力在低频时与单独控制时差别不大,在中高频时由于控制与基础梁无关,故所需控制力比单独控制时小且不会出现峰值。
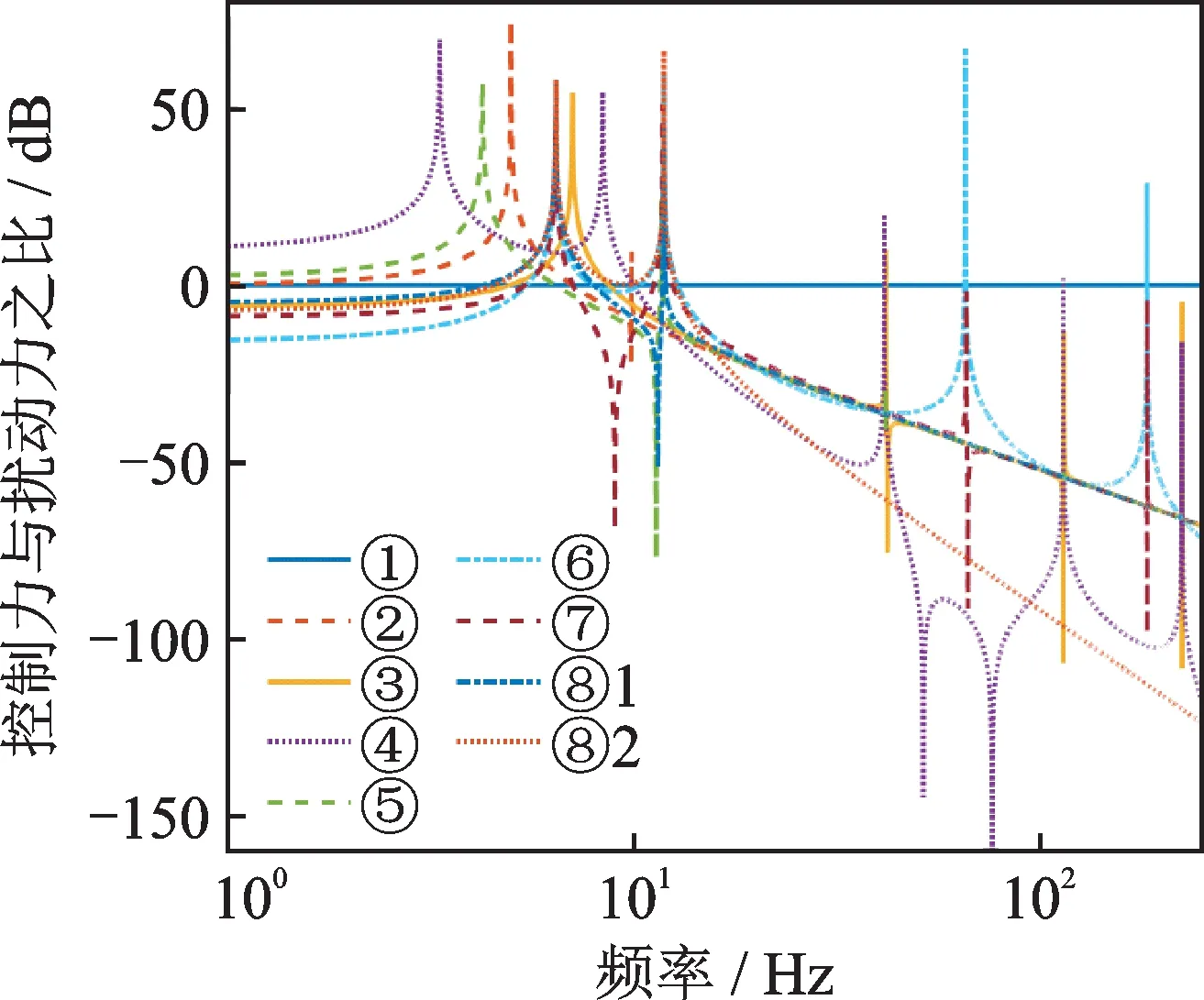
图15 弹性梁基础下不同有源控制位置所需有源控制力与扰动力比值Fig.15 Ratio of active control force to disturbance force required for different active control positions under elastic beam foundation
由上述分析可知,对于弹性梁基础的情况,不同的控制位置和控制目标均会对系统的隔振性能产生不同的影响。因此在实际系统设计中,要综合选取有源控制作用点以及各作用点的控制目标函数。
3 结 论
本文以附加弹簧作为简化附体结构,提出了一种附加弹簧的双层主被动隔振系统模型,对刚性基础和弹性梁基础两种情况分别进行了理论建模和数值计算,讨论了附体结构刚度、阻尼等系统参数和有源控制对隔振性能的影响,得到如下结论:
(1)相比于一般的双层隔振系统,附加弹簧后的双层隔振系统力传递率曲线在低频处除了有两个共振峰外,还存在一个极小值(谷值),且随着附加弹簧刚度的增加,峰值对应的频率逐渐升高,谷值对应的频率逐渐降低;系统的阻尼对共振频率和极小值对应频率没有影响,但是会影响峰值和谷值的大小从而影响力传递率曲线的形状。在中高频时,附加弹簧的双层隔振系统力传递率要显著高于一般的双层隔振系统,说明附加弹簧的存在会使系统在中高频上的隔振性能变差。
(2)弹性梁基础情况的力传递率曲线在低频处与刚性基础差别不大,但是在中高频上出现一系列共振峰,对应的是弹性梁的固有模态。以单位作用力激励下弹性梁的总动能作为隔振性能的评价指标分析隔振性能发现:附加弹簧刚度对梁总动能曲线的主要影响在于低频时的两个耦合共振峰,随着附加弹簧刚度增大,隔振性能逐渐变差;附加弹簧阻尼只会影响振动幅值,不会影响共振频率;弹性梁的刚度主要影响中高频段的共振峰。弹性梁上的两个力作用点的距离主要影响的是低频时的反共振点,两作用点距离越近,反共振点越明显,且对应的反共振频率越高。
(3)在有源控制中,不同的作用位置会对系统不同频段的隔振性能产生影响。对于多传递路径系统,只控制其中一条传递路径不能达到最好的隔振效果。中高频时振动的主要传递路径为附加弹簧,因此控制附加弹簧所在路径可以提升中高频隔振性能。选取不同的控制目标函数,也会对隔振性能产生不同的影响。在有源控制设计中应根据需要控制的频段选择合适的控制位置和目标函数,并且要考虑到附体结构对振动和能量传递的影响,对多个传递路径进行综合控制,以使在较低的控制力下达到最优的隔振效果。
从本文得出的结论中可知,附体结构对隔振系统的性能有着较大的影响,因此在实际系统的设计中,要充分考虑附体结构对振动和能量传递的贡献,以得到更好的隔振效果。
