基于ISE-StyleGAN 的红外舰船图像生成算法
2022-02-15李海军孔繁程牟俊杰刘霄杜贞斌林云
李海军,孔繁程,牟俊杰,刘霄,杜贞斌,林云
(1 海军航空大学 岸防兵学院,山东 烟台 264001)
(2 烟台大学 计算机学院,山东 烟台 264005)
(3 烟台大学 教务处,山东 烟台 264005)
0 引言
红外成像制导相对于传统红外制导方式抗干扰能力强,动态范围更明显,是当前精确制导武器主要制导手段之一,精确制导的主要目标是精准发现,精确打击,因此红外制导的关键因素在于目标的检测。传统红外目标检测一般先对图像区域进行选择,利用尺度不变性特征变换(Scale Invariant Feature Transform,SIFT)和方向梯度直方图(Histogram of Oriented Gradient,HOG)等方法进行特征提取,通过一系列的逻辑运算,然后再使用分类器进行区分,这样的方法需手工设计,时间复杂度高,并且鲁棒性差。近年来,随着计算机视觉领域的不断发展,深度学习逐渐应用在目标检测领域中,根据实际领域需求,不断发展成单阶段和两阶段的目标检测算法。当前,将深度学习应用至红外目标检测领域越来越受到关注,红外目标检测大多通过可见光领域的算法实现,模型的训练对于数据的数量和质量的要求很高,而复杂环境下的完整红外舰船图像难以获取,所以对基于深度学习的红外舰船检测精度有所影响。近年来出现基于人工智能的深度生成模型,包括变分编码器(Variational Auto-Encoders,VAE)[1]、深度信念网络(Deep Belief Network,DBN)[2]、生成式对抗网络(Generative Adversarial Networks,GAN)[3]等,其中GAN 可以通过无监督学习实现对目标特征的提取,在生成模型中其具有较强的泛化能力,已发展出多种变体[4-7],基于GAN 的图像生成成为研究热点。针对使用GAN 对小样本进行图像生成训练时易出现过拟合的问题,UTKARSH O 等[8]提出基于锚点的策略,增强潜在空间对于图像中不同区域拥有不同的真实感,能够保持源图像和生成图像的差异性和相对相似性。LIU R 等[9]通过引入同框架相兼容增强潜在的对比损失,使得相邻潜在空间生成的图像相似度高,而不同潜在空间生成的图像差异性高,生成图像能够保证视觉质量且更加多样化。SAR 图像中存在相干斑噪声,导致其条件生成对抗网络模型(Conditional Generative Adversarial Nets,CGAN)出现崩溃,GUO J Y 等[10]通过归一化相干斑噪声解决了模型崩溃的问题。
目前,利用GAN 进行数据生成的研究对象仍是以可见光图像为主[11],红外图像生成领域的研究方法集中于可见光图像转红外图像,通过红外图像进行生成处理的研究较少,对红外背景下舰船数据生成的研究更是少之又少。由于实地采集红外舰船图像难度较大、费效比高、数据量较少,为能更好地提升基于深度学习的红外目标检测精度和效果,本文提出基于样式的生成对抗网络(Style Generative Adversarial Nets,StyleGAN)的红外舰船图像生成算法,通过训练生成式对抗网络模型,得到高质量红外舰船图像,能够提供红外舰船数据。根据红外舰船图像特点,采用StyleGAN 作为基础架构,在生成器引入自注意力机制,增强舰船图像细节,精简噪声模块,以免图像风格混乱;同时,调整模块分辨率大小,使模型更适合本文图像;利用小波判别器通过小波分解提取图像特征,减少图像伪影的产生,使用双时间尺度更新规则和Adam 优化器优化.训练过程,同时再引入WGAN-gp 损失函数提升收敛效率。
1 算法原理与网络结构设计
1.1 生成式对抗网络
生成式对抗网络GAN 本质是对抗双方生成器和判别器通过零和博弈不断学习、不断改进,最终生成能够以假乱真的本不存在的数据。生成器主要进行样本伪造,训练过程中要不断提高伪造水平,尽可能与真实样本相同;判别器用来判断生成器生成样本的真实性,通过计算生成样本与真实样本的差值去引导生成器不断减小差异。GAN 基本结构如图1 所示。

图1 生成式对抗网络结构Fig.1 Generative adversarial network structure diagram
原始GAN 中目标优化函数为

式中,D表示判别器,G表示生成器,x~pdata表示x来源于真实分布,Z~pz表示随机噪声z来源于模拟分布,Ex~pata[lnD(x)]表示判别器损失,EZ~pzln {1-D[G(z)]}表示生成器损失。
训练结束时,对抗双方达到纳什平衡,判断器无法识别生成图像的真伪。原始GAN 训练过程中生成器从随机噪声中取样,存在生成样本图像状态不可控的问题,近年来不断改进,其中KARRAS T 等提出基于样式的生成式对抗网络(StyleGAN)[12],StyleGAN 移除传统随机噪声,将潜向量(latent code)作为初始输入,采用无监督学习对图像中的语义进行解耦,并采用样式传递方式解决生成图像不可控的问题。
1.2 网络结构设计
StyleGAN 模型在高分辨率图像生成以及样式风格变换上有良好的性能,网络结构如图2 所示,因此,以StyleGAN 为基础结构,针对数据集的特点,对其生成器结构进行改进。StyleGAN 能够在可见光自然.图像的纹理细节方面有很好的表现,对于红外舰船图像来说,其图案形状、颜色丰富程度以及样式种类远.不及可见光自然图像,直接将结构复杂的StyleGAN 应用在红外图像生成上难以得到理.想的生成图像。因此,在原始StyleGAN 基础上对模型进行修改,提出红外舰船增强StyleGAN(Infrared Ship Enhancement StyleGAN,ISE-StyleGAN)模型,以显著提高模型训练的稳定性并获取高质量生成样本。

图2 StyleGAN 生成器结构Fig.2 StyleGAN generator structure
1.2.1 基于自注意力机制的生成器
1)StyleGAN 中的感受野大小受限于卷积核,在训练过程中难以从全局角度捕捉红外舰船图像内容,导致图像部分内部信息和长距离像素关联信息丢失,但是如果使用全连接层获取全局信息,会使模型冗余增加,计算量激增。所以,考虑通过引入自注意力机制解决此问题。自注意力生成对抗网络(Self-Attention Generative Adversarial Networks,SAGAN)[13]首次将自注意力机制引入生成式对抗网络中,生成模型的效果得到极大提升。本文将自注意力引入生成器中,使算法能够在全局领域进行操作,学习到图像中更多的细节和长距离像素关联信息。
如图3 所示,自注意力机制将特征映射为三部分,第一部分f(x)和第三部分h(x)使用1×1 卷积模块进行f(x)=W线性变换,第二部分g(x)进行通道压缩,即

图3 自注意力机制Fig.3 Self-attention

式中,Wf、Wg、Wh、Wv表示四个1×1 卷积层权重矩阵。
然后将f(x)、g(x)转换为矩阵形式,进行转置相乘,经过softmax 处理得到注意力权重βi,j为

式中,βj,i表示第i个位置对生成第j个位置的关系权重,N表示输入特征图中含有特征的位置数量。
再将h(x)与得到的注意力权重βj,i相乘,再经过1×1 卷积层处理得到自注意力特征映射oj为

最后将自注意力特征映射与一比例参数相乘,再同输入特征图加权相加得到最终输出zi为

式中,γ是初值为0 的预定义系数。
2)由于红外舰船图像具有色彩单一、样式结构朴素的特点,所以,对生成器进行针对性简化,将生成器最后一个模块的分辨率大小设定为256×256,使生成器更适合本文提供的数据需求,在确保生成图像质量的前提下,能够减少网络所需参数量,提高生成器的运算效率。
3)减少随机噪声的输入数量。由于红外舰船图像的纹理细节特征没有可见光图像丰富,按照原始StyleGAN 模型进行图像生成时,噪声过多会引入较多噪点,影响自适应实例归一化[14]的进行,进而导致生成图像质量下降。因此,生成器每个不同分辨率网络模块的噪声输入均只引入一个噪声模块。最终改进生成器结构如图4 所示。噪声模块N的生成方法表示为


图4 改进的生成器结构Fig.4 Improved generator architecture
1.2.2 小波判别器
使用小波判别器[15](Wavelet discriminator)进行伪影抑制。由于实验过程中发现,在64×64 分辨率的早期训练阶段,可以观察到阻塞伪影,但随着训练的进行,它们逐渐消失。由于判别器判别失败,伪影会使高分辨率合成缺失高频细节,因此需要使用更强的鉴别器来抑制伪影的产生。
小波判别器结构如图5 所示,在每一个分辨率模块中,使用一个基于跳跃连接的网络从小波分解中提取特征,并将它们合并到从更高分辨率块派生的特征表示中。判别器对输入图像分层,进行双线性下采样降尺度处理,并在每个尺度上检测离散小波分解位置与真实图像的频率差异。这样的小波鉴别器在对抗阻塞伪影方面效果显著。同时,它对分布匹配没有任何负面影响,可有效引导生成器生成丰富的图像细节。

图5 小波判别器结构Fig.5 Structure of wavelet discriminator
1.2.3 损失函数
使用WGAN-gp[16]损失函数提升收敛效率,以此将生成图像z同真实样本x的Wasserstein-1 距离输入至判别器,并基于WGAN 的损失标准,用梯度惩罚项替换权重裁剪项,避免梯度爆炸。最终损失函数为

1.2.4 双时间尺度更新规则
训练时采用双时间尺度更新规则(TTUR)[17]。TTUR 提出新的训练参数更新策略,将生成器G和判别器D自动设置不同的学习率,让D的收敛速度加快,并且能够平衡两者的训练速度。训练过程是根据生成器和判别器损失函数LG、LD的随机梯度来进行的,其中θ是生成器中的学习变量参数,ω是判别器的学习变量参数。由于梯度是随机的,从图像数据集Pdata(x)中随机选择m个真实样本x(i),1 ≤i≤m,和生成图像数据集PG(z)中m个随机选择的生成样本z(i),1 ≤i≤m。如果实际梯度为h(θ,ω)=∇θ LG和g(θ,ω)=∇ω LD,那么就用随机变量M(ω) 和M(θ) 定 义和。因此梯度随机近似于实际梯度。TTUR 一般假设生成器和判别器更新的学习率为a(n)和b(n),则

2 实验结果及分析
2.1 实验数据集
实验数据的获取采用网络爬虫方式,主要是通过网络检索“舰船”、“货轮”等军用民用船只,共4 284 张红外舰船图像,其中舰船数量为7 196 艘。首先按照8∶2 的比例将图片划分成训练集和测试集,然后从测试集中随机抽取一半作为验证集,实验前不对红外图像进行任何处理。
2.2 实验配置
本文所有实验均在Ubuntu20.04 操作系统中进行,CPU 是core i9-12900KF,GPU 为显存12G 的NVIDIA GeForce RTX 3080ti,python 版本为3.7.11,开发工具是pycharm2020.1,框架使用Pytorch1.9.0。实验前首先将自建红外舰船数据集进行批处理,训练参数设置如表1 所示。学习率使用TTUR,批训练数设置为32,单次实验训练900 个Epochs,使用Adam 优化器。

表1 实验训练参数Table 1 Experimental training parameters
2.3 算法训练过程
ISE-StyleGAN 算法实现过程为:

2.4 图像生成效果评价
2.4.1 目视判断评价
为全面展示生成的红外图像,图6 中选取了某一图像在各个迭代生成阶段的生成效果。可见在Epoch=100 时,图像像素化严重并存在失真现象,无法辨别出舰船图像;当Epoch=300 时,图像网格基本消失,但在图像中央已能大致看出舰船轮廓;当Epoch=600 时,舰船图像开始显现,轮廓已接近真实清晰,但图像背景略微模糊;当Epoch=900 时,整体生成的红外图像非常接近真实图像,舰船目标已能够通过目视判读出。
由图6 可以看到,在Epoch 从100 到900 的训练过程中,能够得到不同分辨率的红外舰船图像。因此,可以通过利用低分辨率图像得到舰船的整体轮廓以及部分舰船特征,以此来对舰船目标进行检测识别,并持续跟踪目标;利用高分辨率图像可识别出舰船中的细节特征,因此,可以更具针对性地进行舰船目标的细粒度识别,比如,可对舰船中的驾驶室、雷达、水线等要害部位进行识别定位,利用反舰导弹进行精确打击。

图6 ISE-StyleGAN 训练过程Fig.6 The training process of ISE-StyleGAN
为进一步验证算法的生成图像质量,对图像中显著位置天线桅杆进行放大对比。图7 展示了两幅图的原图、舰船天线桅杆放大图以及ISE-StyleGAN 生成图像。从图7(b)、(d)中可以看到虽然生成图像的天线桅杆略有模糊,并且中间的桅杆和右边的桅杆中部横杆一小部分不相同,但是图像整体形状、桅杆位置分布以及其他细节部分基本一致,并且整体的亮度以及对比度比较符合人眼要求。相比图7(f),图7(h)也略微模糊,整体亮度偏灰暗,天线桅杆形状大致相同,能够看出轮廓边缘,较好地区分出天线桅杆和海面背景。综上,通过将原图和生成图像中显著位置进行对比看出,尽管在整体亮度以及模糊程度上略有差别,但是生成图像能够较好地生成图像局部特征,基本还原出原图的效果。

图7 原图与生成图像的对比Fig.7 Compare of the original images with the generated images
基于相同实验条件、不同场景进行实验,随机选择不同背景的生成红外图像如图8 所示,对比原数据、DCGAN、CycleGAN、StyleGAN 和ISE-StyleGAN 的实验结果。DCGAN 生成图像背景部分同原图像相差较多,并且该算法生成的第一张图像中目标尺度大小存在问题,第二张图像中存在空间扭曲,说明仍然存在训练不稳定、模型坍塌的现象;CycleGAN 的生成图像对于曝光度较低的背景部分具有较好的生成效果,但是整体的灰度分布、灰度等级存在着较大差异并且有颜色偏移的现象。StyleGAN 也能生成表面光滑、质量较好的自然图像,但是部分图中夹杂着一些明显与原始图像特征不符的缺陷特征,存在风格混乱的问题,该算法生成的第一张图中舰船位置颠倒,第四张图中海面出现黑色条纹,图像缺乏真实性。

图8 不同生成式对抗网络算法生成图像对比Fig.8 Comparison of images generated by different generative adversarial network algorithms
根据红外图像的先验知识以及目视判读得到:1)本文算法在白天、黑夜、云雾等各种气象条件下都能得到较好的舰船和背景的红外成像效果;2)本文算法在舰船目标不同尺度不同数量的条件下也能有较好的红外成像效果;3)图中展示的生成图像满足舰船的大多数特征要求,轮廓清晰可辨,图像纹理细节较明显,整体的灰度分布同真实图像的红外效果非常接近,仅仅在整体亮度以及色差上略有差别。
通过目视图像中特征显著位置对比以及主观评价生成图像可得:使用本文算法所得红外图像能基本展示出舰船的轮廓以及纹理细节,在灰度分布上与真实图像大致相同,整体上两幅图片的相似度很高,通过目视以及主观判断,生成的红外舰船图像表现较好。
2.4.2 客观指标评价
为进一步验证实验生成图像的有效性,通过客观性能指标峰值信噪比(Peak Signal to Noise Ratio,PSNR)和多层级结构相似性(Multi-Scale Structural Similarity Index,MS-SSIM)[18]对生成图像进行定量分析。PSNR 指标基于原始图像和生成图像中对应像素点的误差大小,主要是衡量生成图像失真程度,分值越高,图像越逼真。由于数据集中图像尺度丰富多样,所以另一个评估指标采用MS-SSIM。同SSIM 程序相同,MS-SSIM 也是进行原始与生成图像的分辨率、亮度、对比度以及相关结构的比较,得到比较分数然后进行积累,对图像进行下采样,整个过程重复迭代,以此来进行不同图像尺度的多SSIM 评价。
表2 和表3 给出了各个模型对各种背景、尺度的红外舰船图像生成客观指标评价结果,可以看到ISEStyleGAN 的PSNR 值以及MS-SSIM 值在各种类型的目标下都是最高,说明本文提出的改进算法相比几种经典生成式对抗网络方法生成的红外舰船图像更加逼真,质量更好。同时,ISE-StyleGAN 生成的舰船轮廓和细节同原始图像更相似,因此,可以推断出ISE-StyleGAN 生成的舰船图像特征同原始图像特征更相似。

表2 生成式对抗网络模型PSNR 指标结果Table 2 PSNR index results of generative adversarial network model

表3 生成式对抗网络模型MS-SSIM 指标结果Table 3 MS-SSIM index results of generative adversarial network model
2.4.3 目标检测算法测试
生成红外舰船图像旨在解决由于红外数据量不足影响目标检测精度的问题。所以,可以通过将生成数据集应用至舰船检测任务来进一步验证生成图像的有效性。验证过程采用不同的数据集,包括原始红外舰船数据集,原始数据集同常规增广的数据组合数据集,DCGAN、CycleGAN、StyleGAN、ISE-StyleGAN 生成图像组合数据集分别进行舰船检测训练,数据集具体设计如表4 所示。常规增广包括图像平移变换、随机缩放、随机裁剪等方法,检测算法采用YOLOv3、SSD、Faster R-CNN、Centernet,epoch=50,使用平均精确率(mAP)作为评价指标。

表4 目标检测测试数据集构成Table 4 Data set composition of object detection test
图9 给出了四种算法训练在不同数据集中的mAP 变化曲线,对比可知,使用原始数据集进行目标检测,精度结果都不是很理想,并且不同检测算法使用这1 000 张图片得到的结果相差较大,说明不同检测算法对数据集依赖程度不同。对原始数据集进行扩充后无论是使用常规增广还是通过算法数据生成,目标检测精度均能得到一定程度的提升,同时,不同生成式对抗网络算法得到的扩充数据集在相同目标检测模型中运行,可比较出各个模型的性能差异。使用常规增广方法在不同检测算法上有8%左右的精度提升,其他主流生成算法能将精度提升10%左右,但是,存在使用生成算法的效果不如常规增广的情况。对比表5 中序号2和序号5 的YOLOv3 算法检测精度,常规增广的检测效果提升更明显,对比序号2 和序号4 使用SSD 算法,也是常规增广效果更好。因此,虽然主流生成算法能够丰富红外舰船特征多样性,但是使用该数据集生成的图像质量不高,存在风格混乱以及缺陷特征的问题,会造成海杂波的虚检。从表5 可以看出本文算法生成的数据使用四种目标检测算法测试都能有较好的检测效果,鲁棒性较强。例如在YOLOv3 算法中,ISEStyleGAN 扩充后的目标检测网络与原始数据集相比在平均精确率上提升15%左右,验证了基于ISEStyleGAN 生成红外舰船图像的有效性和可行性。

图9 各数据集用不同算法得到的mAP 值Fig.9 mAP value of each dataset by different algorithms
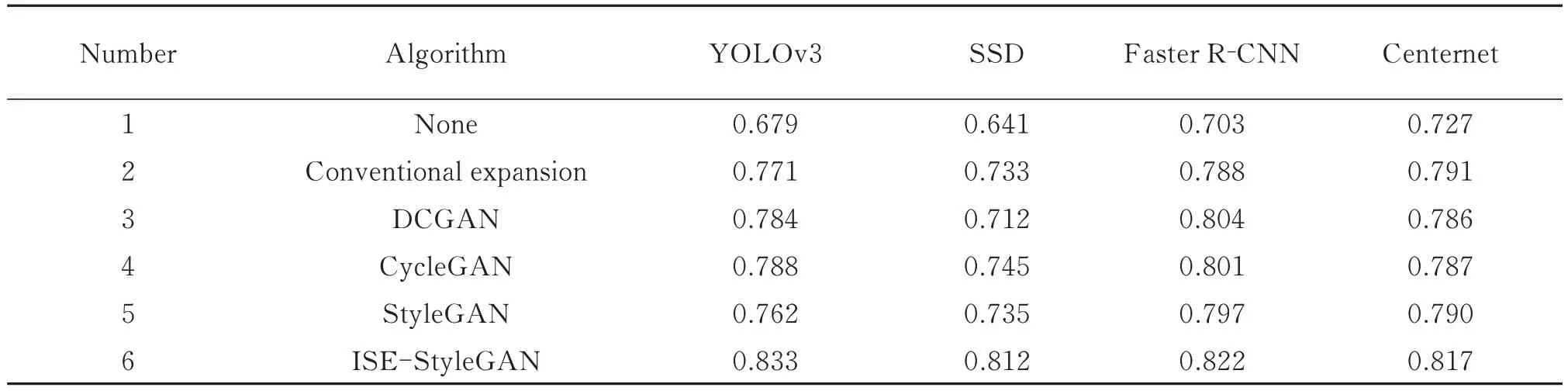
表5 各数据集目标检测的mAP 值Table 5 mAP value of target detection in each dataset
3 结论
本文针对红外舰船数据难以获取的问题,提出ISE-StyleGAN 红外舰船图像生成算法,通过目视判读以及客观评价指标对原始图像以及DCGAN、CycleGAN、StyleGAN、ISE-StyleGAN 生成图像进行对比实验。结果表明,本文算法生成的红外舰船图像质量较好,同真实红外图像相似度较高;再经过4 种经典目标检测算法测试,本文算法生成图像构建的数据集检测效果均最优。因此,该方法可用于红外图像生成,为红外舰船数据提供来源。
