基于点扩散函数的拼接镜边缘传感器定标实验研究
2022-02-15王斌戴懿纯许方宇金振宇
王斌,戴懿纯,许方宇,金振宇
(1 中国科学院云南天文台 天文技术实验室,昆明 650216)
(2 中国科学院大学,北京 100049)
0 引言
中国巨型太阳望远镜(Chinese Giant Solar Telescope,CGST)在1 μm 波长观测太阳光球表面20 km 的精细结构,其主要科学目标集中在太阳大气各层磁场的超精细结构,以及高时空分辨率的演化过程[1-3]。24块等腰梯形子镜拼接共相是目前CGST 的一个主要设计方案,其主镜是一个外径8 m、环宽1.2m 的环形孔径[4-6]。目前的CGST 主动拼接方案中,拼接主镜的piston 误差由机电型边缘传感器探测改正。在太阳观测中,日间的温度起伏较大,主镜面受到太阳热辐射影响产生温度梯度,为改善镜面视宁度需要进行镜面温控,望远镜机架受热辐射的影响也会产生温度变化。太阳望远镜复杂的观测环境会引起机电型边缘传感器的零点漂移,使主镜面形误差逐渐增加,无法长时间保持共相。机电型边缘传感器主要有电容式、电感式、电涡流式等[7-10],目前研制的边缘传感器探测频率高,测量精度达到1 nm,能够减少环境带来的影响,但仍存在着不同程度的温度漂移和时间漂移问题[11]。比如国外针对E-ELT 望远镜研制的电感式边缘传感器,在实验测试中温度变化28°C 传感器读数变化37 nm,温度漂移为1.32 nm/°C[10];Keck 望远镜采用的电容式差分传感器温度漂移大约2 nm/°C,时间漂移为3.2 nm 每周,这两个因素会导致传感器的零点不稳定[8],为此Keck 望远镜每隔3~4 周对边缘传感器的零点进行一次定标。为了解决机电传感器零点漂移的难题,需要寻找一种对机电型边缘传感器零点进行短周期定标的方法,定标周期大约在数十秒到数分钟内。
CGST 要在可见光或近红外波段实现共相保持,边缘探测精度的要求为5 nm[5],因此边缘传感器的定标精度需要优于5 nm。光学共相探测技术是对主镜面形以及拼接误差进行检测,测量的是子镜间绝对Piston误差,可以用于机电型边缘传感器的零点定标。目前正在研究或已经用在拼接望远镜上的光学共相探测技术主要包括:宽窄带点扩散函数(Point Spread Function,PSF)的探测技术[12-13]、曲率波前探测技术[14]、四棱锥探测技术[15]、色散条纹探测技术[16]、相位差探测技术[17]、泽尼克相衬探测技术[18]、干涉探测技术[19]等,这些探测技术主要用于拼接镜面的共相误差检测,为边缘传感器的零点位置进行定标。因此,采用光学探测技术对拼接太阳望远镜的边缘传感器进行短周期定标是一个可选择的方案。目前为止,在拼接镜共相检测中运用比较成熟和广泛的是基于PSF 的检测方法。国内也基于该方法进行了共相误差检测的研究;2000 年,苏定强等[3]采用宽窄带PSF 的检测方法完成了拼接镜面的共相检测,实现了拼接镜衍射极限成像。2010年,林旭东等[20]采用球径仪、白光斐索干涉和窄带PSF 的检测方法完成了拼接镜共相检测,检测精度优于16 nm。2017 年,李斌等[21]采用宽带PSF 的检测方法结合双波长窄带PSF 的检测方法完成了拼接镜共相检测,检测精度优于26 nm。这些方法主要用于共相调整阶段,追求大的动态范围,而CGST 的机电型边缘传感器的零点定标对测量精度提出了很高的要求,对动态范围要求为±100 nm 以内。
针对太阳望远镜中边缘传感器零点不稳定的问题,采用光学探测技术对边缘传感器进行短周期定标。本文利用子镜边缘采样孔径的PSF 对子镜边缘高度进行探测,在环形拼接镜的简化平台两镜系统上对该方法的探测误差水平进行了评估,并开展了基于PSF 边缘探测的主动控制实验,通过实验来验证光学探测技术用于边缘传感器短周期定标的可行性。
1 基于PSF 的互相关检测方法
1.1 原理介绍
采用类似于Keck 望远镜的窄带PSF 探测技术[13]对边缘传感器零点定标。如图1,在子镜边缘处设置半径为r的圆形采样子孔径,若子镜间存在piston 为ΔP,用波长为λ的理想单色光进行检测,孔径面的坐标为(x,y),焦平面的坐标为(u,v),其中k=2π/λ。采样子孔径的复振幅函数表示为

图1 子镜边缘圆形采样孔径示意Fig.1 Schematic of the circular aperture at the edge of the segmented mirror

焦平面上的复振幅表示为

焦平面上的光强分布可以表示为

图2 为采样孔径的PSF 形态随着piston 的变化。当piston 误差为0 时,衍射图样是一个理想的艾里斑,当piston 从-λ/4 变化到0 时,PSF 的旁瓣逐渐消失变成理想的艾里斑;从0 变化到λ/4 时,PSF 的旁瓣逐渐出现,与起始时刻相同,刚好形成一个变化周期。根据PSF 在一个变化周期内[-λ/4,λ/4]的不同特征来提取piston。
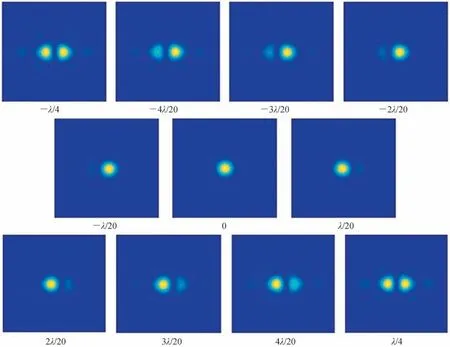
图2 Piston 误差从-λ/4 变化到λ/4 的理论衍射图Fig.2 Theoretical diffraction pattern with piston error changing from -λ/4 to λ/4
通常采用互相关算法来提取piston,通过实验或者理论模拟获得piston 误差在一个变化周期[-λ/4,λ/4]内的PSF 作为模板,用待测的PSF 图样与模板图样进行如下互相关运算
式中,c为互相关系数,xi为待测PSF 图样的第i个像素灰度值,yi为模板图样的第i个像素灰度值,,分别为待测PSF 图样和模板图样平均值。通过计算待测的PSF 与各模板的互相关系数,通常用相关系数最大值对应的模板数据来估计piston,若仅用相关系数的最大值来估计piston,容易受到噪声的干扰,并且检测精度仅为模板间隔。由于piston 包含在式(3)的三角函数因子中,采用三角函数对相关系数进行拟合,拟合后极大值对应的数据即为piston,这种方法的极大值是通过整体的相关系数拟合出来的,具有一定的抗噪能力。
理论生成21 个衍射图样作为模板,piston 误差间隔为λ/41。图3(a)是 piston 为0.11λ时的衍射光斑,通过与模板互相关运算后,该衍射光斑与第15 个模板图样的互相关系数最大,对应的piston 为0.1λ。对21 个相关系数进行三角函数拟合,如图3(b),横坐标为piston,纵坐标为互相关系数,拟合后piston 为0.106λ。
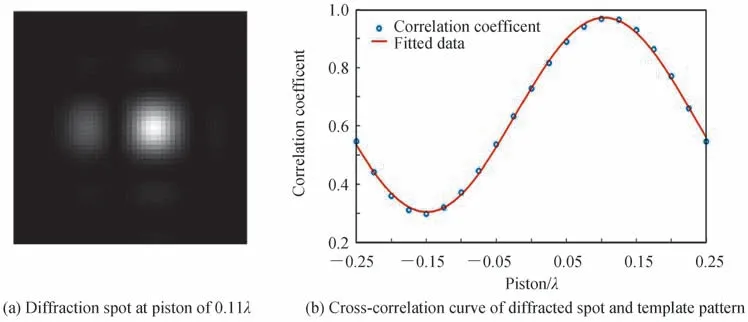
图3 Piston 为0.11λ 的衍射光斑与模板图样的互相关曲线Fig.3 Cross-correlation curve of diffraction spot with piston of 0.11λ and template pattern
该检测算法简单,探测频率主要取决于互相关运算,抗噪性能好,检测精度高,能够实现piston 误差的实时探测。在拼接镜的主动控制中,边缘传感器的零点漂移是缓慢的,±λ/4 的检测量程满足短周期定标的动态范围。
1.2 影响PSF 互相关检测的因素
影响边缘探测的两个主要因素是:采样孔径的配准误差、子镜的倾斜误差。为此分析采样孔径的匹配误差以及子镜的倾斜误差满足什么样的条件时,不会对piston 的检测产生影响,在边缘探测中可以将这两个因素忽略。
如图4,设X轴方向上,采样孔径中心偏离拼缝中心的距离ΔL为配准误差,圆形采样孔径半径为L,定义失准比例为ΔL/L。假设检测光源的中心波长为610 nm,圆形采样孔径直径为60 mm,piston 为67 nm,根据数值模拟,图5 是不同失准比例下检测出的piston,横坐标为失准比例,纵坐标为探测到的piston,随着失准比例的增大,检测出的piston 误差与实际值偏离越大。当失准比例小于0.1 时,检测出的piston 与对准时的结果是一样的。采样孔径的配准精度主要与光瞳掩膜的加工误差有关,若加工误差满足配准要求时,可以通过机械调整实现光瞳与掩膜的配准;若加工误差不满足配准要求时,通过定标的方法,消除配准误差的影响。

图4 微透镜孔径在X 方向上偏离了子镜边缘中心Fig.4 The aperture of the micro-lens deviates from the center of the segment edge in the X direction

图5 不同对准误差引起的piston 误差Fig.5 Different alignment errors lead to piston error
子镜间存在倾斜误差时,采样子孔径的衍射光斑会发生变化,对piston 误差的检测产生影响。设子镜绕着X轴方向的倾斜角为tilt,绕着Y轴方向的倾斜角为tip,分析当piston 为0 时,检测出的piston 误差随着tip误差以及tilt 误差的变化。图6 是tip、tilt 误差都为0.1″时,PSF 与11 个模板图样的互相关系数曲线,横坐标为piston,纵坐标为互相关系数。根据图中的拟合结果,当tip、tilt 变化到0.1″时,检测出的piston 与实际值一致。在前期的主动闭环实验研究[22]中,子镜tip、tilt 的均方根(Root Mean Square,RMS)维持在0.012″,峰谷值(Peak to Valley,PV)为0.056″,均小于0.1″。因此在拼接镜的主动控制中,可以忽略倾斜对PSF 互相关检测的影响。

图6 Tip、tilt 误差为0.1″时PSF 与模板的互相关曲线Fig.6 Cross-correlation curves of PSF and template when tip,tilt errors are 0.1″
2 两镜主动光学实验系统
主动光学实验平台中两镜系统由两块半圆形球面反射镜拼接而成,如图7(a)。在拼接镜的出瞳面上放置一块5×5 的微透镜阵列,两子镜的拼缝对准中间一列孔径的中心,微透镜阵列上分布着与拼接子镜一一对应的采样子孔径,相当于加入了光瞳掩膜,如图7(b)。利用子镜内部的采样孔径探测tip、tilt 误差,子镜边缘处的采样子孔径探测piston 误差。图7(c)为各采样孔径的衍射光斑。两镜实验系统的具体参数如表1。
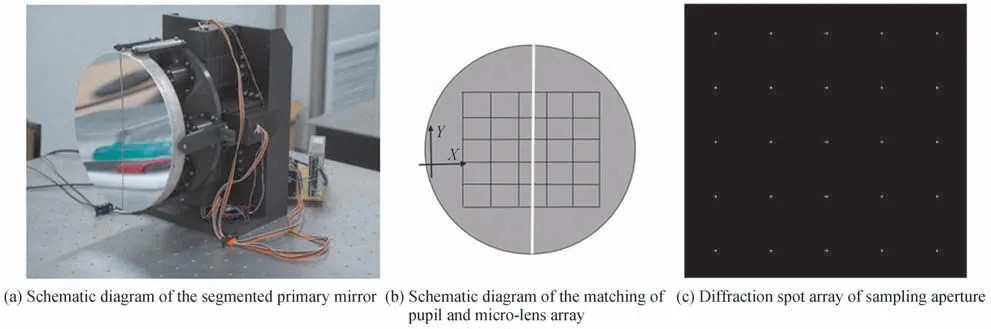
图7 两镜系统的光学探测方案Fig.7 Optical detection scheme of the two-segmented mirror system
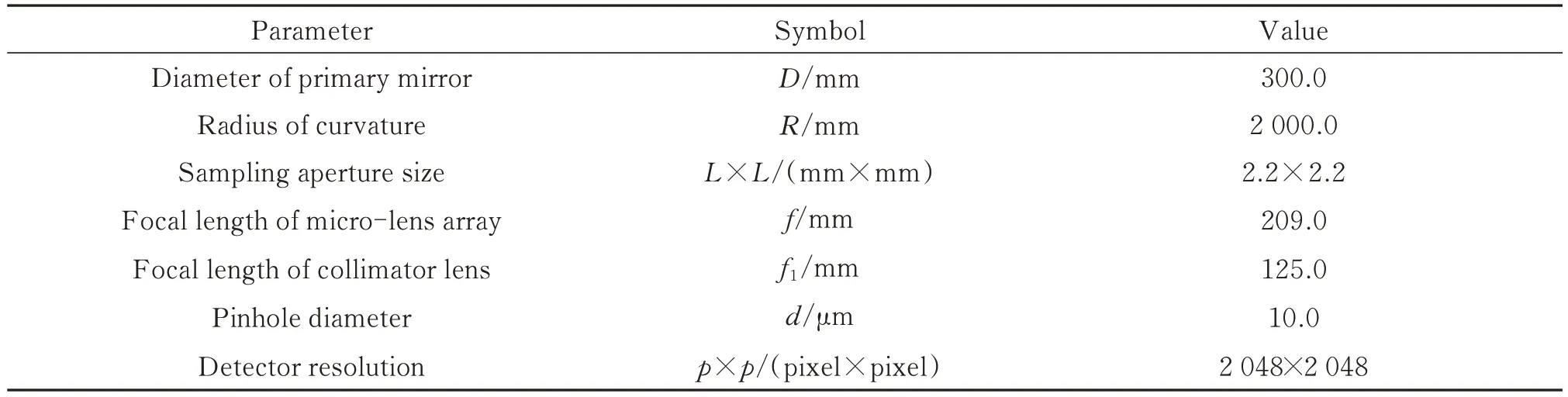
表1 两镜拼接系统的光学参数Table 1 Optical parameters of the two-segmented mirror system
子镜的tip,tilt 误差测量是利用子镜内部的采样子孔径进行,当拼接子镜间存在倾斜时,入射到S-H 探测器的光波面相对理想波面就会发生倾斜,此时在探测器像面上对应于倾斜子镜产生的光斑阵列会相对于理想像点发生偏移。通过计算子镜内部采样孔径衍射光斑的质心偏移量,根据光学系统参数将偏移量换算为倾斜误差,最终测量结果是子镜内部10 个孔径测量值的平均。
子镜的piston 是利用拼缝边缘处的5 个子孔径探测的,采样孔径是方形的,理论生成piston 从-λ/4 到λ/4 范围内的方孔衍射图样作为模板。在实验室环境中,由镜面支撑结构、自身重力以及外界干扰引起的子镜边缘高度变化是缓慢的。在前期的实验研究中[23],通过对两镜系统进行主动控制,子镜边缘高度的RMS能够维持在6.15 nm,因此动态范围为[-λ/4,λ/4]的光学探测在主动控制中能够满足子镜边缘高度变化的测量。
两镜系统的边缘传感器采用德国PI 公司的单极电容式边缘传感器及其采集系统(D-E30.100 型单极电容传感器,E-E12.009 型模块化数字机箱及中央处理单元),传感器的动态范围为±50 μm,分辨率为1 nm,最高探测频率为500 Hz。
拼接镜的主动控制实验系统主要由两个通道构成,面形检测通道和光学探测通道,如图8。面形检测通道是一台4D technology 干涉仪,主要有两个用途,一是对拼接镜的倾斜和离焦探测,完成拼接镜共焦;二是共相调整完成后,对拼接镜的面形进行检测,验证拼接镜是否共相。光学探测通道是一台S-H 波前探测器,在主动保持中用于拼接误差的实时探测。
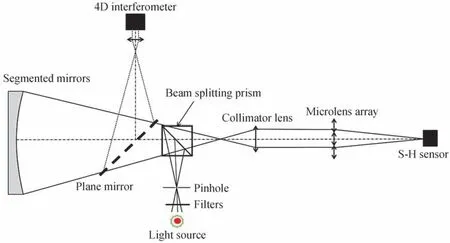
图8 两镜拼接系统的光学器件排布Fig.8 Schematic diagram of the optical device arrangement of the two-segmented mirror system
先利用4D technology 干涉仪检测子镜倾斜和离焦,通过促动器调整两镜系统实现共焦,再利用宽波段与窄波段算法相结合实现两镜系统共相。在主动控制实验中,采用子镜边缘处的五个子孔径实时测量边缘高度的变化,并结合倾斜探测反演子镜的位置状态,通过促动器实时调节子镜姿态来实现拼接镜的主动保持。检测光的中心波长为610 nm,带宽为30 nm,基于PSF 互相关检测的动态范围为-152.5~152.5 nm。
3 实验结果与分析
3.1 探测精度的评估
首先对PSF 互相关检测的误差水平进行评估,为光学探测对边缘传感器进行短周期定标的可能性提供评估依据。在两镜系统中,子镜背部的三个促动器能够实现每个步长5 nm 的镜面位移,因此可以通过促动器产生已知的piston,利用PSF 互相关检测法对已知的piston 进行检测,边缘传感器记录子镜边缘高度变化。拼接镜完成共相调整后,以此时的状态作为零点,三个促动器每5 s 以步长5 nm 的位移产生piston,范围从-25~30 nm。采样孔径的PSF 以1 Hz 的频率进行piston 探测,边缘传感器以1 Hz 记录边缘高度的变化。同样地,促动器以步长10 nm 的位移产生piston,范围从-60~60 nm。促动器位移产生的piston、PSF 互相关检测法测量的piston 和边缘传感器读数值如图9,横坐标为促动器移动的时间,纵坐标为piston。

图9 促动器位移产生的piston、PSF 互相关检测法测量的piston 以及边缘传感器读数值Fig.9 Piston generated by actuator displacement,piston measured by PSF cross-correlation detection method,and edge sensor readings
促动器位移产生的piston 与PSF 互相关法测量值以及边缘传感器测量值的残差如图10。表2 为促动器与PSF 互相关检测的残差统计量,表3 为促动器与边缘传感器的残差统计量。通过促动器产生的piston 与PSF 互相关法测量值之间的残差来估计探测误差水平,其测量精度优于5 nm。
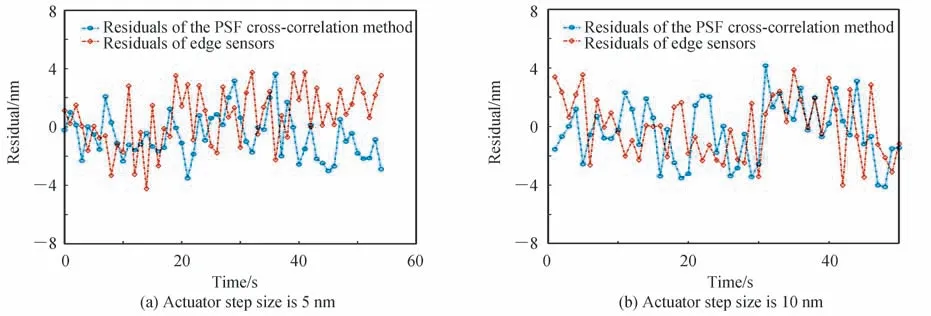
图10 促动器位移产生的piston 分别与PSF 互相关法测量值以及边缘传感器测量值的残差Fig.10 The residuals of the measured values of the piston and PSF cross-correlation method and the measured values of the edge sensor generated by the displacement of the actuator

表2 促动器与PSF 互相关法测量值的残差统计量Table 2 Statistics of the residuals of the measured values of the cross-correlation method between the actuator and the PSF

表3 促动器与边缘传感器测量值的残差统计量Table 3 Statistics of residuals of actuator and edge sensor measurements
3.2 基于PSF 边缘探测的主动控制实验
利用4Dtechnology 干涉仪对S-H 探测器的倾斜探测精度进行了定标和评估,其倾斜探测精度为0.014″[24]。实验中,piston 误差探测量起伏的方差为0.35 nm,倾斜探测量起伏的方差为0.005″,因此采用5帧数据的测量结果进行平均,边缘探测和倾斜探测的频率约为2.5 Hz。
通过PSF 的边缘探测替代边缘传感器,并结合倾斜探测在两镜系统上开展了300 min 的主动闭环控制实验。在闭环状态下tip、tilt 误差的PV 值分别为0.048″、0.056″,tip、tilt 误差的RMS 分别为0.01″、0.009″,闭环控制带宽为0.24 Hz。闭环控制结束时,用4D 干涉仪对两镜系统的面形进行检测,图11(a)为拼接镜的干涉条纹,图11(b)中面形误差的RMS 为18.73 nm,PV 为102.32 nm。该结果证明两镜系统实现了主动保持,基于PSF 的边缘探测结合倾斜探测能够精确反映子镜位置状态的变化,通过闭环控制能够将拼接镜的面形误差的RMS 维持在18.73 nm。

图11 4D 干涉仪面形检测结果Fig.11 4D interferometer measurement results
子镜边缘处的五个子孔径探测到的piston 分别为P1、P2、P3、P4、P5。图12(a)为闭环控制中P3的变化,表4 为闭环控制中五个探测量的RMS 和PV 值。五个探测量的RMS 和PV 值都在同一个水平,对五个探测量的RMS 和PV 值进行平均,可以估计出主动保持中边缘高度残余量的RMS 为6.33 nm,PV 值为37.23 nm。

表4 五个边缘探测量的RMS 和PV 值Table 4 RMS and PV values of five edge detections
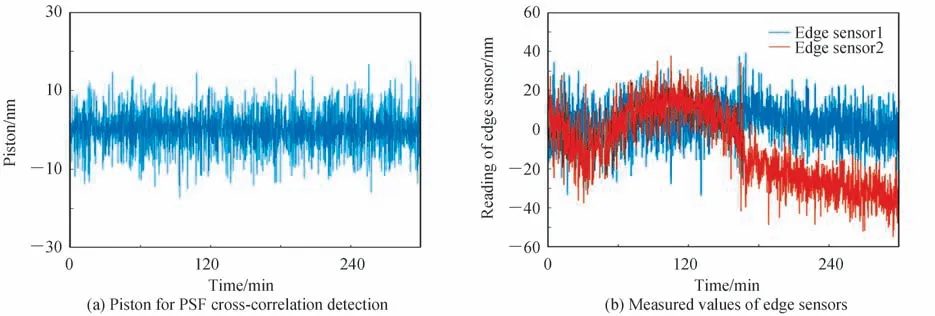
图12 在闭环控制中PSF 互相关检测法探测的变化以及边缘传感器测量值的变化Fig.12 In closed-loop control,the change of the detected value of the PSF cross-correlation detection method and the change of the measured value of the edge sensor
在闭环控制中,两个边缘传感器读数值随时间变化,如图12(b),第1 个边缘传感器测量值的RMS 为11.19 nm,PV 值为66.21 nm;第2 个边缘传感器测量值的RMS 为24.94 nm,PV 值为94.53 nm。在300 min的闭环控制中,第2 个边缘传感器的测量值存在漂移,从起始到160 min 内,测量值出现缓慢的起伏,160 min到闭环结束时,测量值沿着负方向漂移,结果表明边缘传感器受到环境等因素的影响,测量值存在不稳定的问题,因此对边缘传感器进行短周期的定标是必要的。
4 结论
本文使用微透镜阵列作为拼接镜的采样子孔径,通过采样孔径的PSF 探测子镜的拼接误差。在定标实验中,利用基于子镜边缘的PSF 探测方法对促动器产生的piston 误差进行检测,并对比了边缘传感器的测量值,对PSF 互相关方法的检测误差水平进行了评估,其检测精度优于5 nm。基于PSF 互相关检测的方法开展了拼接镜的主动保持实验,在5 h 的闭环控制实验中,拼接镜倾斜变化的RMS 维持在0.01 ″,子镜边缘高度变化RMS 维持在6.33 nm,拼接镜面形误差的RMS 维持在18.73 nm。实验结果表明,基于子镜边缘采样孔径的PSF 边缘探测方法能够实现拼接镜的主动保持,其控制带宽为0.24 Hz。通过交叉定标实验和主动控制实验,验证了基于PSF 互相关检测方法的精度和频率满足对CGST 机电型边缘传感器的零点短周期定标的需求。研究结果为环形拼接太阳望远镜在近红外或可见光波段实现主动保持提供了参考。