基于游标效应的温度不敏感光纤拉力传感器
2022-02-15郭云陈圣林王平魏翔宇王玉娟王善平万海城
郭云,陈圣林,王平,魏翔宇,王玉娟,王善平,万海城
(1 山东华宇工学院 电气工程学院,山东 德州 253000)
(2 德州职业技术学院 电子与新能源技术工程系,山东 德州 253000)
0 引言
光纤传感已经在生物医学[1]、健康监测[2]、人工智能[3]和环境监测等各个领域得到了广泛的应用。经过几十年的发展,各式各样的光纤传感相继被提出,其中有分布式光纤传感器[4]、光纤光栅传感器[1]、干涉型光纤传感器[5]。分布式光纤传感器适用于远距离测量,光纤光栅传感器测量灵敏度较低,显然干涉型光纤传感器在小范围、高灵敏度的需求中是更好的选择。常见干涉型光纤拉力传感器有马赫-曾德干涉仪(Mach-Zehnder Interferometer,MZI)[5]、法布里-珀罗干涉仪(Fabry-Perot Interferometer,FPI)[6]、萨格纳克干涉仪(Sagnak Interferometer,SI)[7]等。尽管干涉型传感器的灵敏度高于光纤光栅传感器,但有时不能够满足更高灵敏度的需求,因此近几年有学者提出了基于游标效应的级联型光纤干涉仪,其中包括双MZI 级联[8]、双FPI 级联[9]、MZI-FPI 级联[10]等等。结构中的两个干涉仪,其中一个作为传感腔,另一个作为参考腔,这种方式可以将传感器的灵敏度放大几倍至十几倍,但级联结构的干涉腔长和插入损耗难以控制。2015 年,QUAN Mingren 等[11]提出一种基于光子晶体光纤的游标效应超高灵敏度开放腔的法布里-珀罗干涉仪气体折射率传感器,其灵敏度可达30 899 nm/RIU。2019 年,ZHAO Yuxin 等[12]制备了双FPI 并联型全光纤液体折射率传感器,其折射率灵敏度达到了9 048.78 nm/RIU,放大了近8 倍。2022 年,SONG Xiaokang 等[13]制备了双FPI 并联型全光纤气体压力传感器,并联后结构的灵敏度比单一传感腔的灵敏度放大了11 倍。相比与级联结构,该并联结构可分别对参考腔和和传感腔的长度进行精确切割,但能量匹配的问题仍未解决。因此,如何实现光纤内高质量的游标效应仍是亟待解决的问题。
本文提出了一种基于游标效应增敏的全光纤拉力传感器,该传感器由传感法布里-珀罗干涉仪(Sensing Fabry-Perot Interferometer,SFPI)和参考法布里-珀罗干涉仪(Reference Fabry-Perot Interferometer,RFPI)并联而成。通过光纤衰减器对RFPI 能量的精确调节,实现了高质量的游标包络。同时,该传感器与单一SFPI 相比,拉力灵敏度提高了15.8 倍左右,且具有很好的抗温度干扰能力,温度串扰仅为9.8×10-4N/°C。
1 结构制备及其工作原理
传感器的结构示意图如图1 所示,其中SFPI 通过法兰盘连接在光纤耦合器的3 接口处,RFPI 与光纤耦合器的4 接口之间串联光纤衰减器(Attenuator),SFPI 与RFPI 组成并联结构。

图1 试验系统示意图Fig.1 Test system schematic diagram
RFPI 为开放的空气腔,其具体的制备方法为:1)将一段特定长度的内径为80 μm 的空芯光纤(Polymicro Technologies,TSP080125)的一端熔接在单模光纤(康宁SMF28)上,如图2(a)所示;2)在电荷藕合器件(Charge Coupled Device,CCD)的辅助下精确控制所需长度,并将多余的内径为80μm 的空芯光纤进行切除,如图2(b)所示;3)将步骤2 中预制结构的空芯光纤一端与内径为10 μm 的空芯光纤(Polymicro Technologies,TSP010125)相熔接,如图2(c)所示。

图2 RFPI 制备示意图Fig.2 RFPI preparation of schematic diagram
SFPI 为封闭的空气腔,其具体的制备方法为:1)将一段单模光纤与一段内径为80 μm 的空芯光纤熔接,作为预制光纤,如图3(a)所示;2)设置熔接机放电强度为10 bit,放电时间为700 ms,使其处于偏拉锥状态;3)通过控制熔接机夹具的位移,使预制光纤移动至熔接点偏离放电针一定距离后,在空芯光纤上进行放电,使空芯光纤塌陷形成封闭腔,如图3(c)~(d)所示。该步骤能够通过控制熔接机夹具的位移,从而精准控制封闭腔的长度;4)减小熔接机的放电强度为8 bit,对步骤3 中制备的封闭腔进行多次放电,使封闭腔内部的反射面光滑无瑕疵,从而提高反射光功率。

图3 SFPI 制备示意图Fig.3 SFPI preparation of schematic diagram
由图1 所示,RFPI 和SFPI 的反射面两侧介质均分别为空气和二氧化硅,因此各反射面的反射率可由式(1)求出

式中,R为反射率,nc=1 和n1=1.45 分别为空气和二氧化硅的有效折射率,可计算得出反射面的反射率大约为3.5%。因其反射率较低,高阶反射光的能力弱,几乎可以忽略不计,因此可近似为双光束干涉。SFPI 和RFPI 的反射光强IS和IR分别为[6]

式中,I1和I2分别表示SFPI 两个反射面的反射光强,L1为SFPI 空气腔的长度,λ为共振波长,φ0和φ1分别为SFPI 和RFPI 的初相,I3和I4分别表示RFPI 两个反射面的反射光强,L2为RFPI 空气腔的长度。当满足(4nL)/λ+φ=(2m+1)π(m=0,1,2…)时,出现干涉条纹。此时对应的干涉谷的波长为

由式(4),可以看出单一干涉条纹波长λ随着腔长L的增加而增加,即发生红移。SFPI 和RFPI 通过光纤耦合器并联后,两束光的合成光强Ir为[12]

式中,E为常数,a为包络的振幅。由于SFPI 和RFPI 干涉条纹上的各个极值点的合成可以产生具有周期性包络的光谱。包络曲线的函数式可由∂Ir∂λ=0 求导得出

式中,D为函数的直流部分,m为函数交流部分的振幅,h1和h2分别表示SFPI 和RFPI 的光程。则包络函数的自由光谱范围(Free Spectral Range,FSR)为

本文提出的传感器仅SFPI 参与拉力的测量,因此光程h2为常数,h1随着拉力的变化而变化,则相应的FSR 为

SFPI 的拉力灵敏度和包络函数的拉力灵敏度可分别表示为[14]

结合式(6)、(8)和(10)可推导出包络曲线波谷中心波长的拉力灵敏度为

式(11)与式(9)相比,包络曲线的拉力灵敏度比SFPI 的拉力灵敏度放大了M倍。其中M的大小结合式(9)和(11)可得

为形成高质量的游标包络,在RFPI 与光纤耦合器之间加入光纤衰减器来调控RFPI 的插入损耗使其和SFPI 的能量相匹配,并通过数值分析法和实验验证了光纤衰减器对游标包络质量的影响,仿真和实验结果如图4 所示。

图4 有无衰减器的叠加光谱对比Fig.4 Attenuator function simulation
由图4(a)可知SFPI 与RFPI 的插入损耗不一致时,游标包络的对比度为0.36,而当加入光纤衰减器使SFPI 和RFPI 的插入损耗一至时,游标包络的对比度提升至0.48,由图4(b)可得。通过图4(c)~(d)可得,在实验条件下加入光纤衰减器前后,包络的对比度由0.05 提升至0.2。因此加入光纤衰减器能够有效的提升游标包络的质量。该结构因其独特的空芯光纤级联结构可满足实际应用中的多功能化的需求,能实现高灵敏度的拉力、压强同步测量[15-16]。
2 实验结果及分析
实验系统如图5 所示,宽带光源(Broadband light Source,BBS,1 400~1 600 nm)发出的信号光首先经隔离器通过光纤耦合器进入SFPI 和RFPI,经SFPI 和RFPI 干涉后反射进入的光纤耦合器进行合成,最终进入光谱分析仪(optical spectrum analyzers,OSA,分辨率0.02 nm)。通过在SFPI 末端添加不同质量的砝码进行拉力的测量,SFPI 末端预留足够长的SMF,并在SMF 的尾端粘连挂钩,用于悬挂不同质量的砝码。需要注意的是,因挂钩和光纤自身存在质量,因此在实验测量之前要保证光纤和挂钩处于稳定状态时作为无拉力状态。

图5 并联FPI 传感器的实验系统Fig.5 Experimental system for paralleled FPI sensor
本次实验制备的SFPI 的腔长L1=67 μm。首先对单一SFPI 进行拉力测试,实验结果如图6 所示。
通过图6(a)可以看出,随着拉力的增加,引起腔长的增加,SFPI 的干涉条纹发生红移现象,与式(4)中的分析一致,对应的增大拉力灵敏度为4.022 nm/N,减小拉力灵敏度为3.986 nm/N,线性度均为0.999,加减拉力灵敏度相差仅为0.036 nm/N,因此该传感器具有较好的重复性。
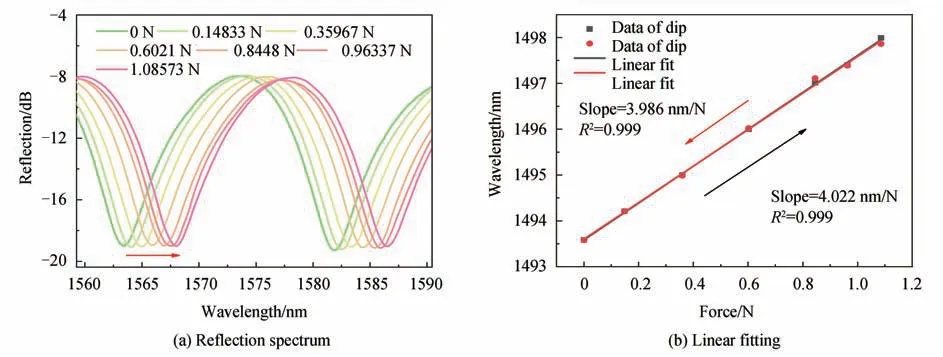
图6 单个SFPI 的拉力响应Fig.6 Tension response of single SFPI
为了进一步提升传感器的拉力灵敏度,本次实验分别制备了两个RFPI,其腔长分别为L2=80 μm 和L3=63 μm,并分别与SFPI 组成并联结构一和并联结构二。对两组并联结构进行了拉力实验,实验结果如图7 所示。

图7 并联FPI 传感器对拉力的响应Fig.7 Response of paralleled FPI sensor to tension
如图7(a)~(b)所示,随着拉力的增加,结构一的反射光谱发生了明显的蓝移。对应的拉力灵敏度为-19.31 nm/N,线性度为0.992,与单一SFPI 的灵敏度相比,放大了4.8 倍。如图7(c)~(d)所示,随着拉力的增加,结构二的反射光谱发生了明显的红移,对应的拉力灵敏度为63.5 nm/N,线性度为0.993,与单一SFPI 的灵敏度相比,放大了15.8 倍,与理论分析一致。与先前报道的部分拉力传感器相比灵敏度有显著的提升,如表1 所示。本次实验获得了几倍至十几倍的灵敏放大,并利用光纤衰减器使SFPI 和RFPI 的能量相匹配,获得了较好的游标包络,提高了测量精度。

表1 与先前报道文献的传感器性能对比分析Table 1 Performance analysis of the proposed probe with that reported in literature
本文提出的基于光学游标效应的并联FPI 不仅具有较高的拉力灵敏度,其游标包络也具有较高的稳定性。为了验证游标包络的稳定性,对结构一进行了游标包络稳定性实验,相同拉力条件下每隔2 min 取一点,共取五个点。实验结果如图8 所示。由图8 可得,游标包络在不改变拉力的情况下的最大漂移量Δλ=0.02 nm。因此该传感器具有良好的稳定性。
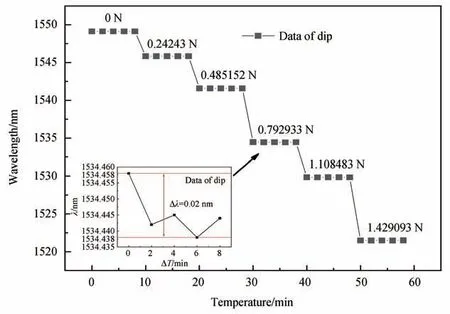
图8 游标包络稳性响应Fig.8 Vernier envelope stability response
因光纤本身具有热光效应和热膨胀效应,因此存在着温度串扰,为了探究传感器的温度串扰,本文进行了单一SFPI 和并联结构一的温度实验,温度测量范围为100~600 °C,每隔100 °C 取一点,实验结果如图9所示。由图9 可得,单一SFPI 和并联结构一的温度灵敏度分别为3.93 pm/°C 和-18.91 pm/°C,单一SFPI与并联结构一的灵敏度相比,后者放大了约4.8 倍,这是因为RFPI 腔为开放腔,且其中的介质为空气,空气的热光系数和热膨胀系数较低,因此对温度响应不敏感[14]。实验结果表明该结构的传感器温度串扰仅为9.8×10-4N/°C,因此该传感器可满足高温环境下的拉力测试。

图9 传感器的温度响应Fig.9 Temperature test of the sensor
为了验证实验数据的可靠性和真实性,结合实验参数和式(5),进行了两组理论模拟。式(5)内的参数设置分别为:根据实际情况计算得出反射面的反射率约为0.035,即R1=R2=R3=R4=0.035;又因为两个FP 腔内均以空气为传光介质,所以nc=1;第一组理论模拟的RFPI 的腔长L2=80 μm,SFPI 的腔长L1=67 μm(L1<L2);第二组理论模拟的RFPI 的腔长L3=63 μm,SFPI 的腔长L1=67 μm(L1>L3);改变SFPI 的腔长模拟拉力变化,RFPI 不参加拉力测试,理论模拟结果如图10 所示。

图10 模拟拉力响应波长偏移Fig.10 Simulated wavelength shift of tension response
由图10(a)~(c)可以看出,当SFPI 腔长小于RFPI 腔长时,随着拉力的增加,包络线的飘移方向与单一SFPI 干涉谱的飘移方向相反,并且实现了4.99 倍的放大。由图10(d)~(f)可以看出当SFPI 腔长大于RFPI腔长时,随着拉力的增加,包络线的飘移方向与单一SFPI 干涉谱的飘移方向一致,并且实现了15.26 倍的放大。理论模拟结果与实验结果基本一致,误差小于0.04,对于该误差出现的原因,经分析可能有以下几种:1)理论模拟种默认腔内气体折射率为1,与实际有一定的误差;2)实验数据线性拟合未达到100%,存在一定的误差;3)实验设备本身存在的误差。本文同时对相同SFPI 时,不同RFPI 腔长对放大倍数的影响进行了理论仿真分析,分析结果得出RFPI 的腔长与SFPI 的腔长差值越小,放大倍数越大,与式(12)相对应。结果如图11 所示。
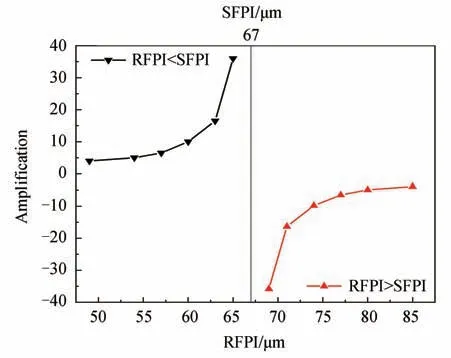
图11 不同腔长的RFPI 对放大倍数的影响Fig.11 Effect of RFPI of different cavity lengths on magnification
3 结论
本文提出了一种基于并联FPI 产生游标效应的高灵敏度光纤高温拉力传感器。拉力灵敏度可从4.022 nm/N 提高到63.5 nm/N,放大系数为15.8,相应的线性度为0.993。同时,该传感器在100~600 °C 范围内的温度串扰仅为9.8×10-4N/°C,因此该传感器能很好的抵御温度波动带来的影响。并通过加入光纤衰减器来调节SFPI 和RFPI 之间的能量配比,实现了高质量的游标包络。此外,因该传感器参考腔的特殊结构,有望实现同一传感器功能化的集成。
