Dual-steering mode based on direct yaw moment control for multiwheel hub motor driven vehicles:Theoretical design and experimental assessment
2022-02-15ZhengZhangXiaojunMaChunguangLiuShuguangWei
Zheng Zhang,Xiao-jun Ma,Chun-guang Liu,Shu-guang Wei
Department of Weapons and Control Engineering,Army Academy of Armored Forces,Beijing,100072,China
Keywords:Multi-wheel hub motor driven vehicle Dual-steering mode Direct yaw moment control Real-time simulation
ABSTRACT One of the main challenges for multi-wheel hub motor driven vehicles is the coordination of individual drivetrains to improve mobility and stability in the steering process.This paper proposes a dual-steering mode based on direct yaw moment control for enhancing vehicle steering ability in complex environments.The control system is designed as a hierarchical structure,with a yaw moment decision layer and a driving force distribution layer.In the higher-level layer,the objective optimization function is constructed to obtain the slip steering ratio,which represents the degree of vehicle slip steering in the dualsteering mode.A yaw moment controller using active disturbance rejection control theory is designed for continuous yaw rate control.When the actual yaw rate of the vehicle deviates from the reference yaw rate obtained by the vehicle reference model and the slip steering ratio,the yaw moment controller is actuated to determine the yaw moment demand for vehicle steering.In the lower-level layer,there is a torque distribution controller based on distribution rules,which meets the requirement of yaw moment demand without affecting the total longitudinal driving force of the vehicle.For verifying the validity and feasibility of the dual-steering mode,simulations were conducted on the hardware-in-loop real-time simulation platform.Additionally,corresponding real vehicle tests were carried out on an eight-wheel prototype vehicle.Test results were generally consistent with the simulation results,thereby demonstrating that the proposed dual-steering mode reduces steering radius and enhances the steering performance of the vehicle.
1.Introduction
Most wheeled vehicles with mechanical transmission rely on a steering mechanism to steer [1].Using a steering mechanism is suitable for vehicles traversing non-harsh road conditions,while tracked vehicles that are capable of maneuvering across off-road environments generally adopt slip steering,even if this method of steering can contribute to severe wear of tracks and result in high power consumption [2,3].Because these two steering modes have particular modes of application,some researchers have proposed a dual-steering mode for vehicles that encounter both on-and offroad environments [4].The hub motor driven vehicle is a good candidate for the dual-steering mode,owing to its independently controllable drivetrains.By adjusting the output torque of the hub motor of the inner and outer wheels,dual-steering can be actuated by adding a certain degree of slip steering while keeping the original steering angle of the vehicle unchanged.
From the steering control viewpoint,a significant issue for hub motor driven vehicles is how to coordinate the operation of multiple motors[5].Hence,extensive research has been performed on methods to coordinate motors as vehicles traverse complex landscapes [6].Some researchers use differential power steering and active front wheel steering to control the driving of vehicles and improve the steering ability,which is a direction of the field of vehicle electrification and intelligence,but the application of these control systems in multi-wheel heavy vehicles is less [7,8].Direct yaw moment control (DYC) is a fundamental method of motor torque coordination widely used in vehicle driving control [9].For wheeled vehicles with mechanical transmission,DYC can be actuated by different braking forces among the left and right wheels generated by the friction brakes[10].In contrast,hub motor driven vehicles can actuate the DYC system by simultaneously adjusting the drive/brake torque of individually controlled motors,thus avoiding excessive sacrifice of vehicle maneuverability [11],providing convenience,and making it possible for vehicles to implement a dual-steering mode.
DYC systems of EVs are generally designed as two-layer control structures [12-14].The higher-level layer controller regulates the vehicle’s actual behavior according to a reference behavior to determine the yaw moment requirements.The lower-level layer controller then achieves the needs of the upper layer by formulating some specific rules to distribute the torque of each drivetrain.Various control techniques have been proposed for DYC [15-23],such as H∞control,proportional integral derivative (PID) control,and sliding mode control.Although each of these techniques has its limitations,these control methods have been widely and successfully used in four-wheel hub motor driven civilian vehicles and have provided a framework for future research on how to improve vehicle steering ability and handling stability.
Multi-axle wheeled vehicles are different from ordinary fourwheeled civil vehicles because they usually need to be mobile under low-and variable-adhesion road conditions and even offroad conditions,rather than relatively flat urban roads.Multi-axle wheeled vehicles sometimes face special conditions such as small-radius steering and high-speed steering.Therefore,it is necessary to consider the characteristics and driving environment of multi-wheel hub motor driven vehicles for dynamic control research,yet there are few studies on the steering control techniques for multi-wheel hub motor driven vehicles.
Considering these challenges of designing an effective and efficient steering control system for multi-axle wheeled vehicles,this paper presents a novel DYC-based dual-steering mode and a corresponding hierarchical control structure for multi-wheel hub motor driven vehicles.We present a yaw moment decision layer,a higher-level layer of the DYC control structure,in which the objective optimization function is constructed to calculate the slip steering ratio under the dual-steering mode.Taking the yaw rate as the direct control variable,a direct yaw moment controller based on the active disturbance rejection control (ADRC) algorithm is designed to calculate the desired yaw moment.In the lower-level torque distribution layer of the control structure,the torque of eight driving motors is distributed through the torque control module without affecting the total longitudinal driving force of the vehicle.
2.Vehicle modeling
The following subscripts and symbols will be used throughout Sections 2 and 3:




Flongitudinal tire force
Flateral tire force
Fvertical tire force
g gravity
Iyaw mass moment of inertia
L wheelbase
l track width
m vehicle mass
O centroid
V vehicle speed
Vlongitudinal vehicle velocity
Vlateral vehicle velocity
α tire slip angle
β vehicle sideslip angle
δsteering wheel angle
δ steering angle (at the wheel)
γ yaw rate
Ccornering stiffness
2.1.Vehicle system modeling
A dynamics model of the case-study vehicle was established for control system design.EVs with a dual-steering function often need to face complex and changeable mobile environments.To fully describe the steering characteristics of vehicles with a dualsteering function,a 3-DOF vehicle model was used (Fig.1).
The proposed model does not consider air resistance and linearizes rolling resistance in order to reduce computation.Even so,this simplified model can accurately describe the handling and stability characteristics of vehicle steering.
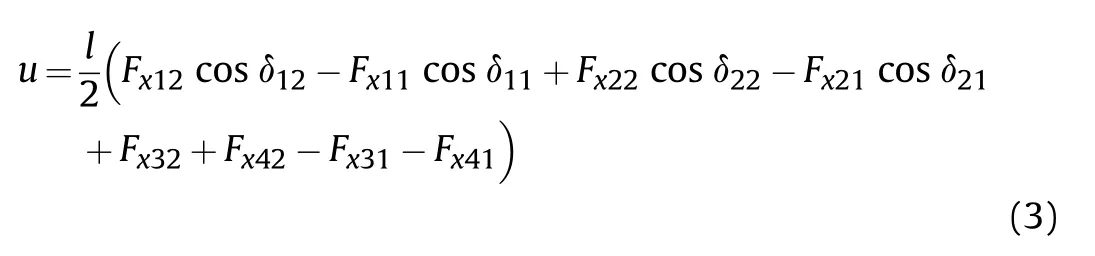
The vehicle motion equations are:
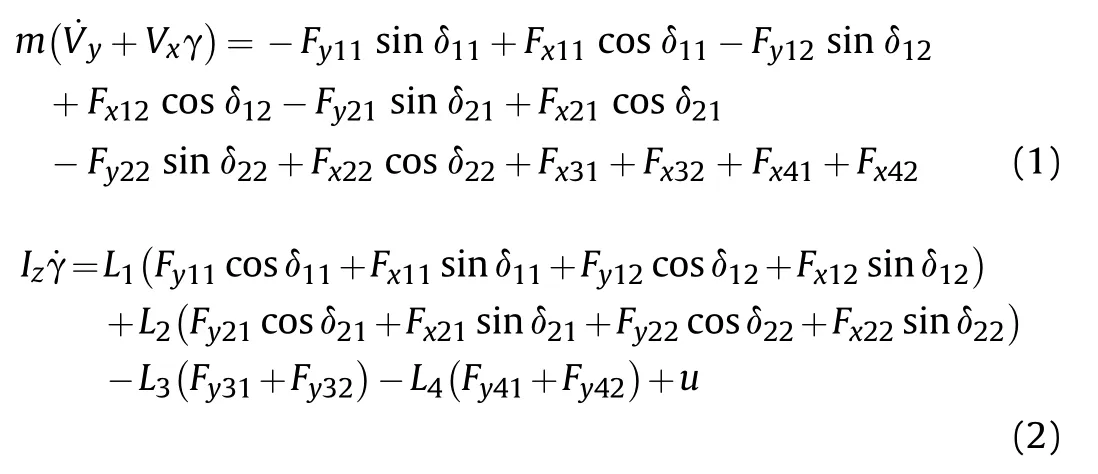
where u is the direct yaw moment,given by:
To make the calculation less complicated,the lateral force of the nonlinear tire model is approximately fitted with a linear function.The lateral force can be expressed as:

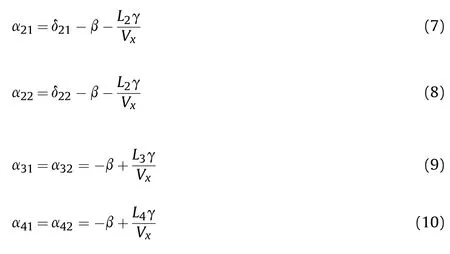
and the rear slip angles are approximately given by:

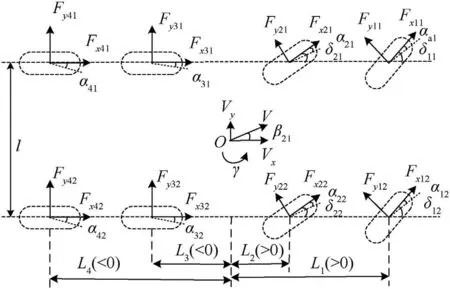
Fig.1. 3-DOF dynamics model of a multi-axle vehicle with dual-steering function.
2.2.Design of vehicle reference behavior
According to(1)-(10),the state-space formulation of the vehicle system is established and can be expressed as:

where x=[β γ]is the system state vector and δ=[δδδδ]is the steering angle vector.
The system matrices are:
where band bare the submodules of matrixB.hhh,hare the submodules of matrix H.
The submodules of matrixA,aaaa,are given by:
The steady-state yaw rate,γ,is expressed as:

The steady-state yaw rate given by Eq.(17)is the reference value for the wheeled steering of a vehicle in an ideal trajectory.
For meeting the mobility and flexibility requirements of multiwheeled vehicles,it is necessary to combine natural steering with slip steering to make the vehicles dual-steering.The constraints of the road conditions also need to be considered for multi-wheeled vehicles.Taking those factors into consideration,the steady-state reference yaw rate in the dual-steering mode,γ,is:

where sgn(δ)is the sign of the steering angle.The value of 0.85 is chosen as a trade-off between steering capability and handling safety.K is the slip steering ratio,which represents the degree of slip steering in the dual-steering mode.
3.Control system design
3.1.Objectives and control structure
The control system for a multi-wheeled vehicle with the dualsteering function is designed to meet three main objectives:
i) To meet the driving demand of the vehicle,the target driving force,and the target yaw moment respond to the driver’s intention (such as throttle signal,steering intention,etc.).
ii) To improve vehicle mobility,the natural steering mode of the wheeled vehicle is combined with the tracked vehicle steering mode to perform the dual-steering mode of driving.
iii) To achieve DYC by means of an actuator,the generalized target force required for the vehicle to travel is distributed to each wheel.
The control system is a double-layer control structure (Fig.2).Specifically,the higher-level control layer is the yaw moment decision-making layer,where the objective optimization function is designed to determine the slip steering ratio.Additionally,the desired yaw moment is obtained by the ADRC of the yaw rate in the higher-level layer,and the vehicle driving force demand is calculated according to the current road condition and vehicle driving status.The lower-level layer of the control system is used for driving force distribution,where driving force distribution rules are formulated to input the assigned command torque to the eight hub motors of the vehicle.
3.2.Higher-level controller design
3.2.1.Slip steering ratio
The slip steering ratio,K,is optimized in a stable operation area,and the objective function of optimization is designed as

where σ,σare the weights of the steering radius and vehicle sideslip angle in the objective function,respectively.Rand βare the natural steering radius and vehicle sideslip angle under the pure rolling condition of the wheel,respectively.
The constraint that the phase plane trajectory of β-˙β must stay within the boundaries of a stable area can be expressed as:

where βis the vehicle sideslip angle in a static,stable limit state,which is generally taken as arctan(0.02μg).The coefficient k,k,kcan be obtained by fitting the phase plane trajectory data.
In practical application,the vehicle multi-body dynamics model is built by Adams software(American MSC,Inc.),and the simulation data are used to fit the curve of σ~R(σ),σ~β(σ)under the boundary conditions of the steering wheel angle,vehicle speed,and road adhesion coefficient.Furthermore,the vehicle weight is also fit by simulation data.On these bases,the optimal solution of the slip steering coefficient can be obtained by using the dichotomy method within the constraints.
3.2.2.Yaw moment controller using ADRC theory
In this section,the actual yaw rate is adjusted to approach the desired yaw rate to determine the yaw moment demand under the dual-steering mode.ADRC is a control technique that takes the unknown parts and variations as the total disturbances of the system,and then estimates and compensates them by using an extended state observer (ESO) [24].Given that ADRC has many advantages,such as convenient calculation,high control precision,and easy adjustment of parameters,the yaw moment controller is designed based on the ADRC algorithm.In the model presented here,the algorithm estimates and compensates the disturbances in real-time,to construct a nonlinear feedback driving control,which can describe the motion characteristics of the vehicle structure(Fig.3).
The ADRC algorithm includes three main parts:the ESO,differential tracker,and nonlinear error feedback rate(Fig.3).
Considering the influence of disturbance,a vehicle reference model with disturbance is given as:

In combination with (11)-(16),Eq.(21) can be expressed as:
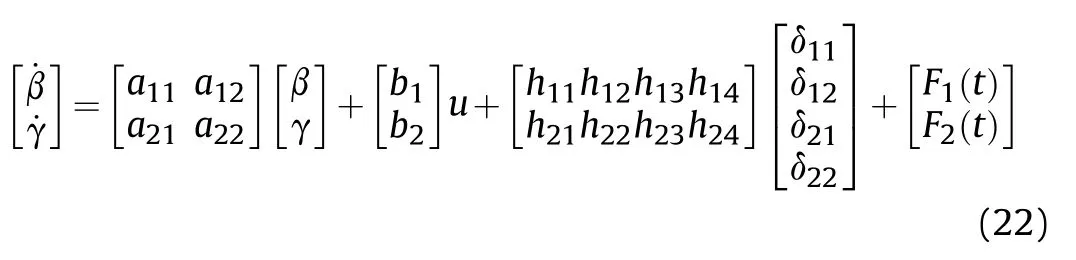
The state Eq.(22)is transformed into a feedback system.ξand ξare introduced into the system as two variables,which can be expressed as:


Fig.2. The structure of the double-layer control system for a multi-wheel hub motor driven vehicle with dual-steering function.
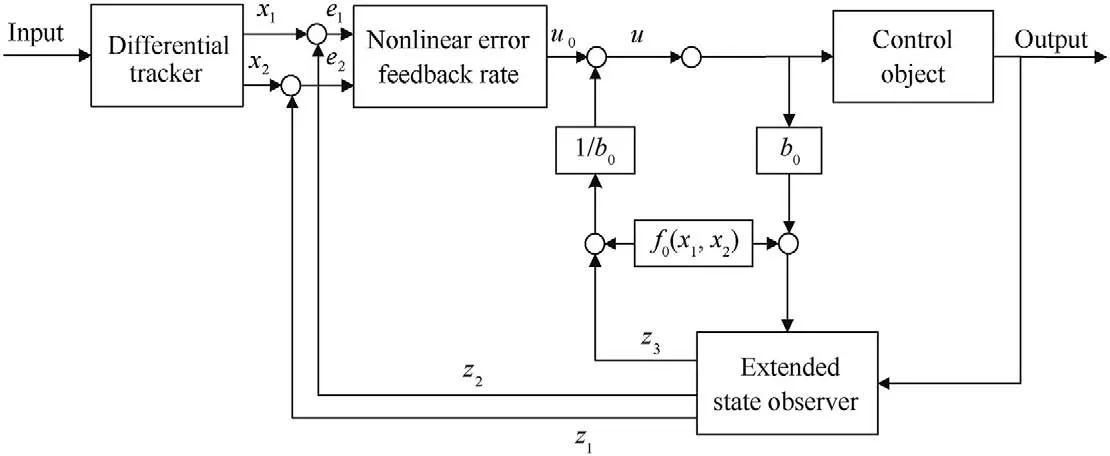
Fig.3. Structure of the ADRC algorithm used to adjust the actual yaw rate to the desired yaw rate.
The derivative of Eq.(23) is expressed as

where F(t)is the total disturbance of the vehicle system,and it is given by:

By using the ESO,the system disturbance is expanded to new state variables as follows:
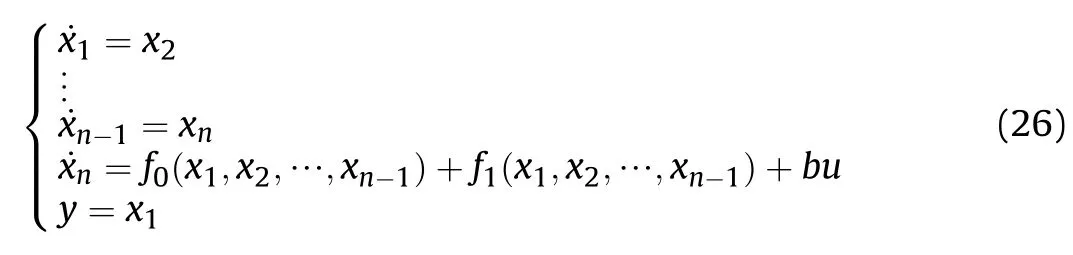
where f(x,x,…,x)represent the known state variables and f(x,x,…,x)are the uncertainties.u and y are the input and output of the ESO,respectively.Moreover,the state variables of the system are x(t),x(t),…,x(t).If the variable ˙x(t)is taken as a new state variable,x(t),then the extended state variables of the system are x(t),x(t),…,x(t).
The total disturbances are estimated by the ESO,which can be expressed as:
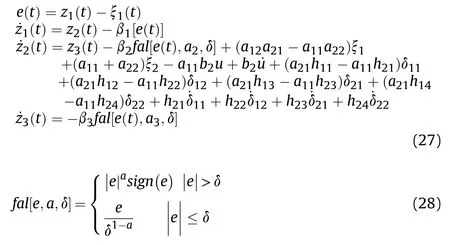
where z,z,z,are the observations of the yaw rate,yaw rate acceleration,and system disturbance,respectively.
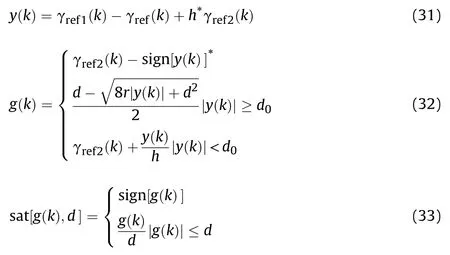
A second-order differential tracker is used to split a given input signal (γ) into two output signals (γ,γ).
γ,γare given by:

where fst(·)is the synthesizing function of the fastest speed control,and it is given by:

where d=hr,and h is the sampling period,r is a parameter characterizing the tracking speed.
The second-order nonlinear feedback combination is adopted to simplify the calculation process,that is:

Thus,when the control system is transformed into a series integrator,the output yaw moment of ADRC is as follows:
3.3.Lower-level controller design
The torque distribution controller of the lower-level layer is designed to realize the dual-steering mode by changing the longitudinal force on both sides of the wheel.The simplified vehicle dynamic model requires that the longitudinal force of the vehicle equals the longitudinal acceleration requirement of the vehicle;thus:
where Dis the driving force requirement for the driver.
The driving force distributor is designed according to the following rules:
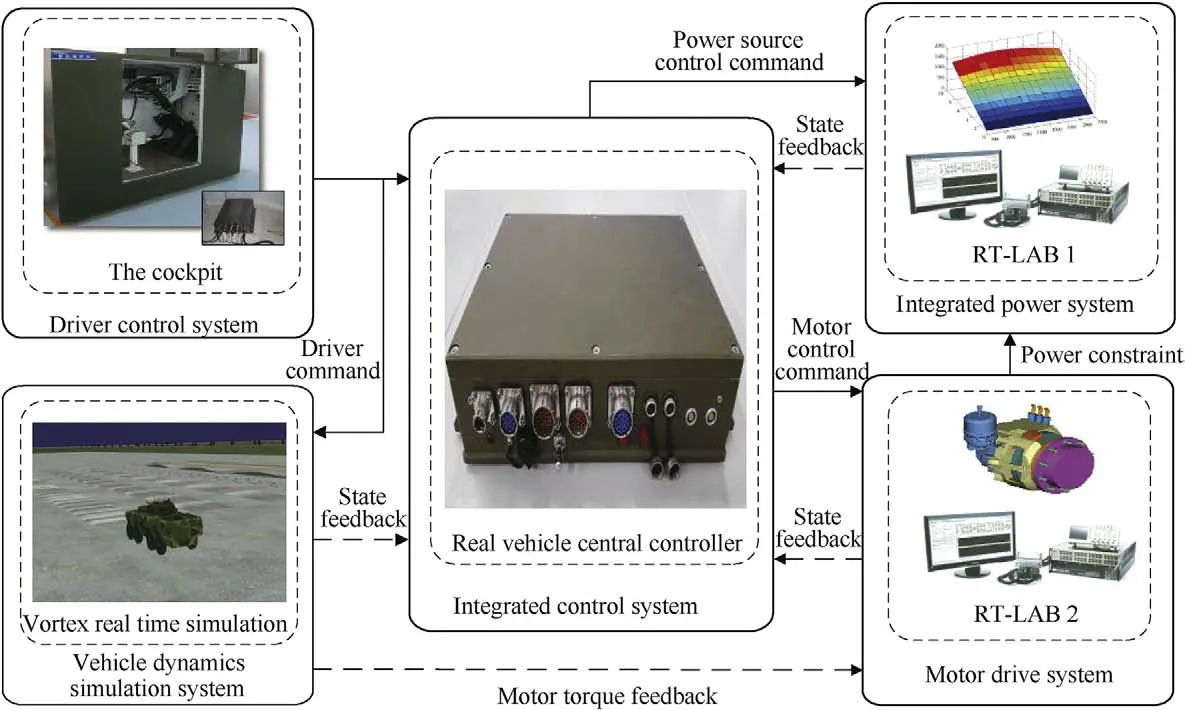
Fig.4. Configuration of the hardware-in-loop real-time simulation platform.
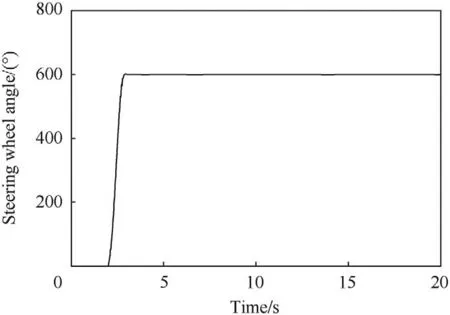
Fig.5. Steering wheel angle in the low-speed,small-radius steering simulation.
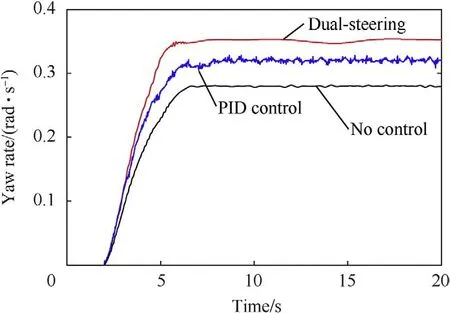
Fig.6. Yaw rate in the low-speed,small-radius steering simulation.
4.Rapid control prototyping
The hardware-in-loop real-time simulation platform was used to conduct simulations using the control system for a multiwheeled vehicle with dual-steering function that was developed in Section 3 (Fig.4).The platform was mainly composed of five subsystems:the cockpit,vehicle dynamics simulation system based on the vortex software,motor drive system,integrated power system based on RT-LAB (OPAL-RT Technologies),and integrated control system with the real vehicle central controller as the core.The FlexRay bus communication protocol was adopted between the systems.
During the simulation,the designed control algorithm is converted into code,which is imported into the real vehicle central controller.The central controller is then incorporated into the simulation system,which can simulate the actual running environment of the vehicle.
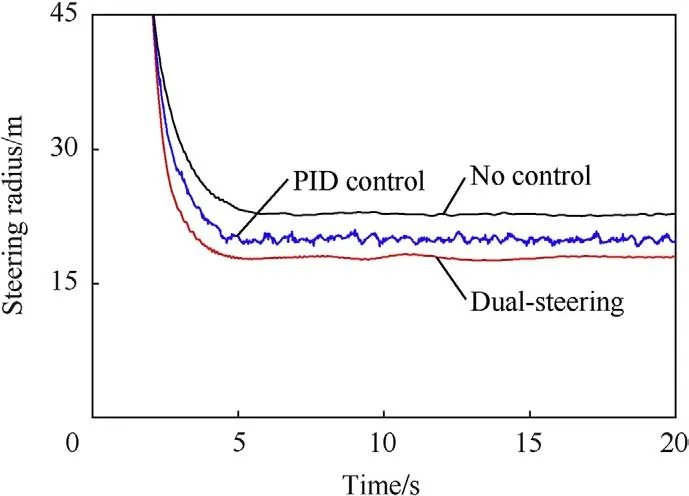
Fig.7. Steering radius in the low-speed,small-radius steering simulation.
The control objective of the designed control system is to improve the steering ability and the handling stability of a multiwheeled with dual-steering function.Therefore,two typical working scenarios of low-speed,small-radius steering,and highspeed,large-radius steering were designed for verification.
PID is often used in steering control of hub motor driven vehicles.Because this method is simple in principle,easy to realize,and widely used,we also designed a higher-level controller by using the PID algorithm.We closely followed the design detailed in Ref.[25].The PID controller controlled the yaw rate,but because it used γinstead of γas the desired yaw rate for DYC,this controller cannot incorporate the dual-steering function in the vehicle.We compared both the steering ability and the handling stability of the vehicle in the natural steering mode without control and the vehicle with yaw rate controlled by the PID algorithm to the vehicle in the dualsteering mode in two scenarios (Sections 4.1 and 4.2).
4.1.Scenario I:A low-speed,small-radius steering maneuver
The effectiveness of the control strategy was first tested using a low-speed,small-radius steering maneuver.The simulation was carried out on a decent road condition with a friction coefficient of 0.8 at a speed of approximately 25 km/h.The steering angle was exerted after approximately 2 min (Fig.5).
The maximum yaw rates of the vehicle in the natural steering mode without control,with PID control,and with the dual-steering mode were 0.28 rad/s,0.32 rad/s,and 0.35 rad/s,respectively(Fig.6).The actual yaw moment of the vehicle in the DYC-based dual-steering mode was adjusted close to the calculated desired yaw moment.
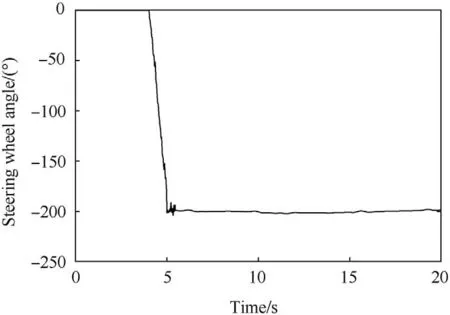
Fig.9. Steering wheel angle in the high-speed,large steering simulation.
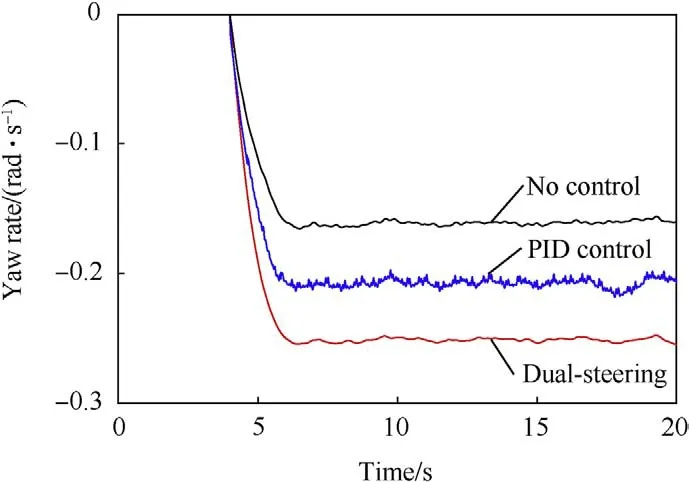
Fig.10. Yaw rate in the high-speed,large steering simulation.
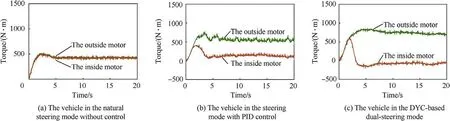
Fig.8. Motor torque output in the low-speed,small-radius steering simulation.
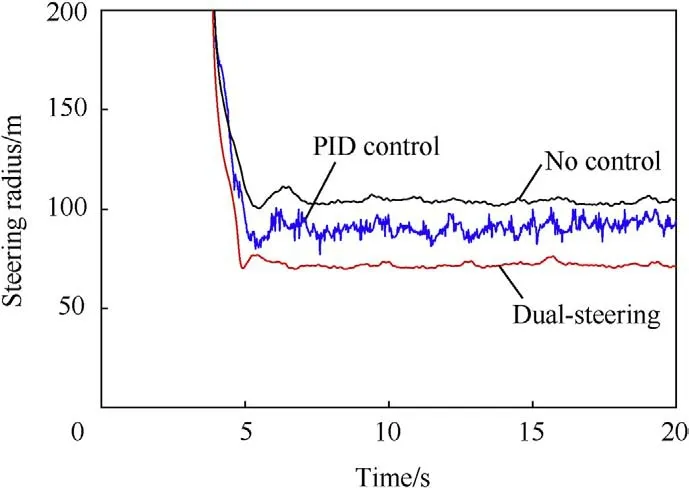
Fig.11. Steering radius in the high-speed large steering simulation.
The steering radius of the vehicle was reduced from 24.3 m without control to 20.6 m with PID control,and further reduced to approximately 17.2 m when the dual-steering mode was adopted(Fig.7).The total torque under the three different control conditions was similar(Fig.8).However,applying PID control and dualsteering control can realize the different distribution of the torque values of the wheel motors on both sides.Furthermore,the vehicle under PID control was affected by the nonlinear factors of the ground inequality in the steering process,and the torque output of the motors on both sides was oscillated.This contrasts with the vehicle using the DYC-based dual-steering mode,where the motor torque on both sides had no apparent oscillation (Fig.8).Collectively,these results demonstrate that the dual-steering mode can effectively reduce the steering radius of the vehicle,improve the flexibility of vehicle steering,and reduce the driver’s handling burden.
4.2.Scenario II:A high-speed,large-radius steering maneuver
In this simulation scenario,the vehicle drove at a speed of approximately 50 km/h on a slippery road with a friction coefficient of 0.4.The steering angle was exerted after approximately 4 s(Fig.9).
When steering at a high-speed and with a large-radius on a low adhesion road,vehicle steering stability is the main control target.Given the same conditions,the simulations resulted in a maximum yaw rate of vehicles without control,with PID control,and with dual-steering control of 0.15 rad/s,0.21 rad/s,and 0.25 rad/s,respectively(Fig.10).The vehicle yaw rate tracking response in the dual-steering mode was more sufficient during the steering period.
The steering radius was reduced from 105.6 m for the vehicle without control to 93.8 m for the vehicle with PID control,and further reduced to 74.2 m for the vehicle with dual-steering control(Fig.11).The vehicle with PID control and the vehicle with DYCbased dual-steering mode both exhibited higher levels of torque for the outside motor wheel compared to the insider motor wheel(Fig.12).Additionally,the vehicle yaw rate and torque output were characterized by jitter when under PID control,but this problem did not appear under dual-steering control (Figs.10 and 11).Collectively,these results indicate that the dual-steering mode can improve the steering stability of the vehicle.
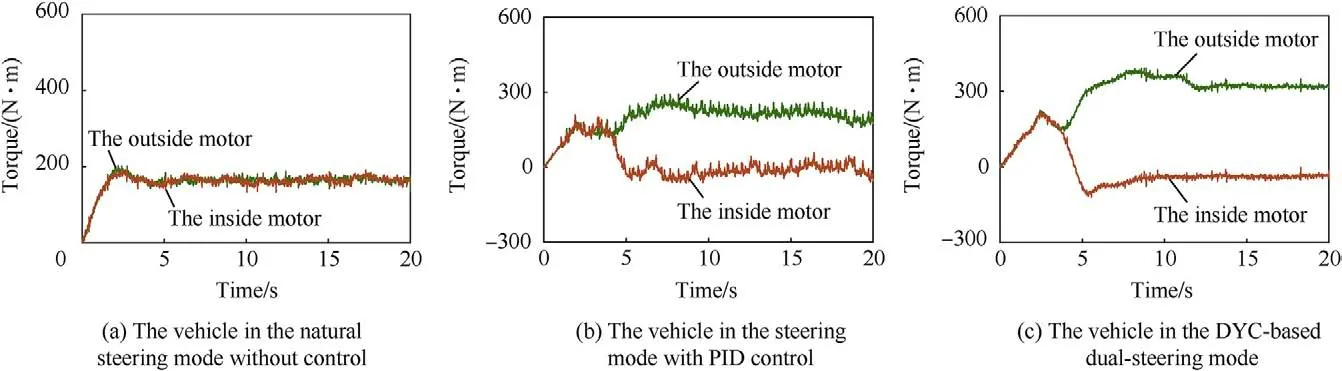
Fig.12. Motor torque output in the high-speed,large steering simulation.
Table 1 Main parameters of the vehicle.

Fig.13. Real vehicle central controller used in the sample vehicle.

Fig.14. State monitoring and data storage equipment.

Fig.15. Vehicle driving trajectory.
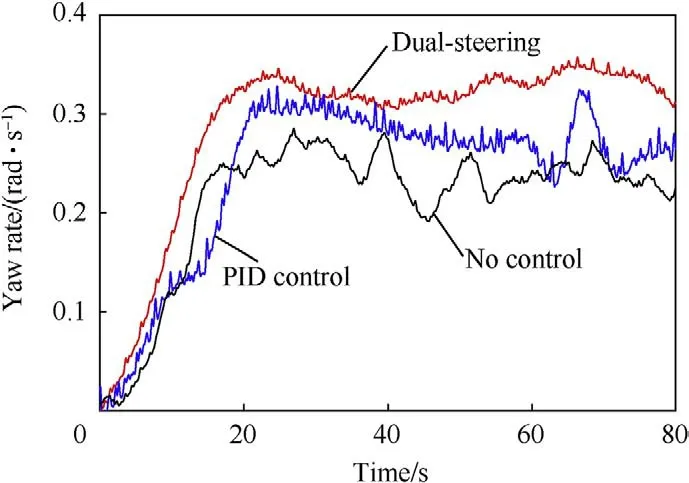
Fig.16. Yaw rate in the low-speed,small-radius steering test.
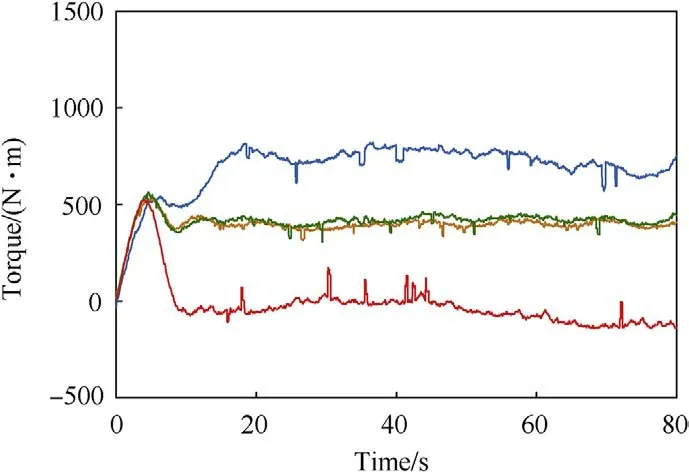
Fig.17. Motor torque output in the low-speed,small-radius steering test.The blue and red lines indicate the torque outside and inside the motor in dual-steering,respectively.The green and yellow lines indicate the torque outside and inside the motor without control,respectively.
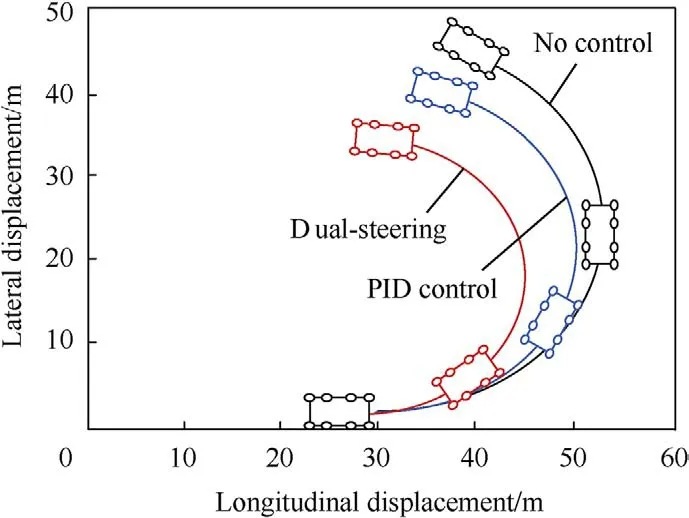
Fig.18. Vehicle driving trajectory in the low-speed,small-radius steering test.
5.Real vehicle tests and analysis
We further verified the reliability of the proposed control system by comparing the driving performance of vehicles without control,with PID control,and with the dual-steering control that was developed in Section 3.The sample vehicle was an improved in-wheel motor driven vehicle based on an eight-wheeled armored vehicle (Table 1).The designed control algorithm was converted into code and imported into the vehicle central controller(Fig.13).The state information(acceleration,yaw rate,etc.)was collected by a state information acquisition box installed in the vehicle.During the test,the vehicle driving information and data were monitored,fed back,and stored in real-time through the display and control terminal (Fig.14).During the tests,we measured the track of the vehicle (Fig.15).
5.1.Low-speed,small-radius steering test
The test using a real vehicle was consistent with the simulation conditions set in Section 4.1.
The yaw rate increased with the implementation of PID control and further increased with the implementation of the dual-steering mode (Fig.16).The steady-state value of the yaw rate was approximately 0.25 rad/s and the peak value was approximately 0.30 rad/s when the vehicle was not under dynamic control(Fig.16).When PID control was applied,the steady-state value of the yaw rate changed to approximately 0.29 rad/s and the peak value was approximately 0.32 rad/s.When the vehicle was actuated in the dual-steering mode,the steady value of the yaw rate was 0.33 rad/s and the peak value was 0.36 rad/s (Fig.16).When the vehicle was tested under low-speed,small-radius steering conditions,the dual-steering control adjusted the torque of the left and right motors,thus changing the steady-state value of the steering radius from 26.4 m without control to 17.6 m with dual-steering control (Figs.17 and 18).In addition,the steering track of the vehicle revealed that the dual-steering mode significantly reduced the steering radius of the vehicle (Fig.18).
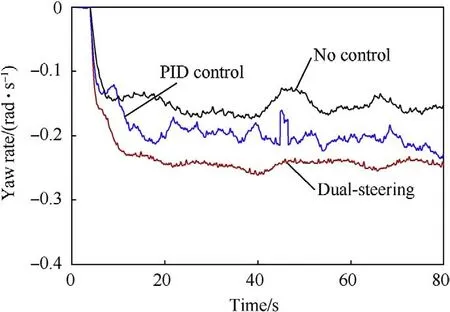
Fig.19. Yaw rate in the high-speed,large-radius steering test.
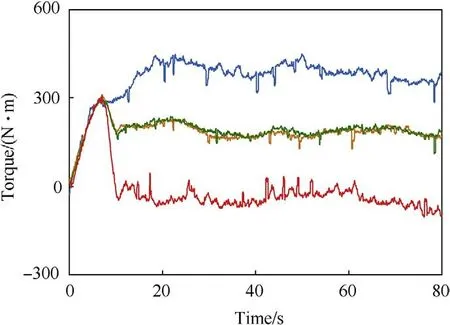
Fig.20. Motor torque output in a high-speed large-radius steering test.The blue and the red lines indicate the torque outside and inside the motor in dual-steering,respectively.The green and yellow lines indicate the torque outside and inside the motor without control,respectively.
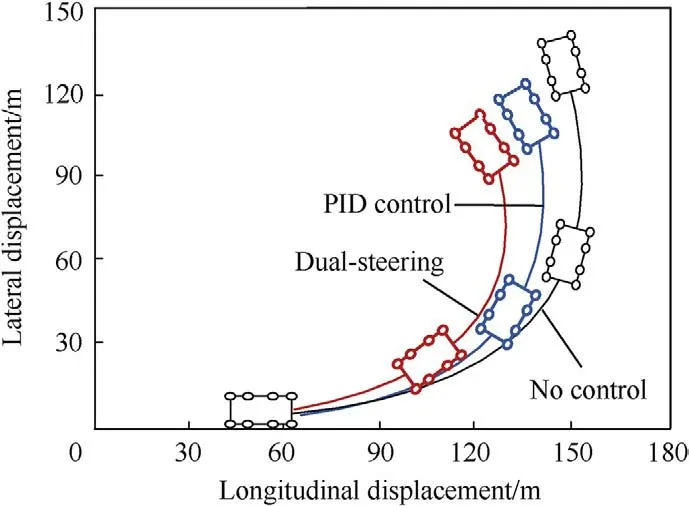
Fig.21. Vehicle driving trajectory in the high-speed large-radius steering test.
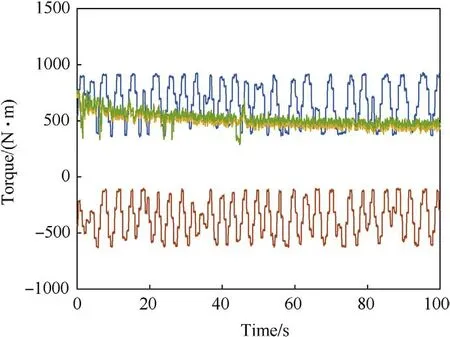
Fig.22. Motor torque output in a minimum radius steering test.The blue and the red lines indicate the torque outside and inside the motor in dual-steering,respectively.The green and yellow lines indicate the torque outside and inside the motor without control,respectively.
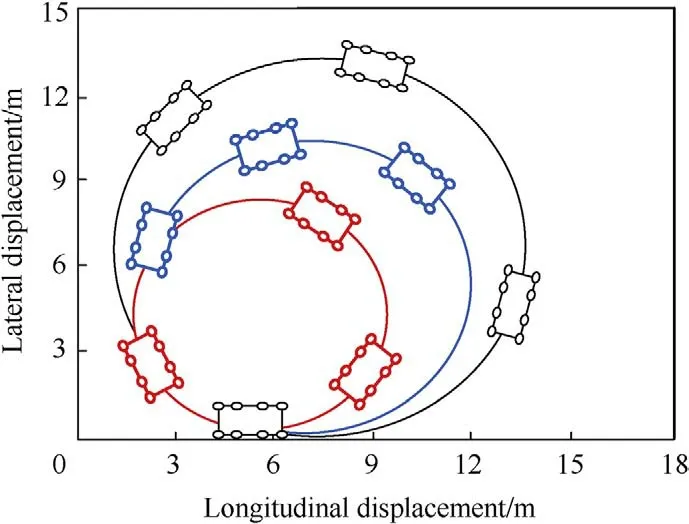
Fig.23. Vehicle driving trajectory in the minimum radius steering test.The red,blue and black lines indicate the vehicle driving trajectory in dual-steering,with PID control and without control,respectively.
5.2.High-speed,large-radius steering test
The test using the real vehicle was consistent with the simulation conditions set in Section 4.2.
(The steady values of the yaw rate when the vehicle was driven on the low adhesion road were 0.14 rad/s,0.19 rad/s,and 0.24 rad/s(maximum values 0.17 rad/s,0.23 rad/s,and 0.27 rad/s) without control,with PID control applied,and with dual-steering mode,respectively (Fig.19).This sentence needs to be expressed succinctly without changing its meaning)The trend of the yaw rate of the vehicle in the dual-steering mode was more stable and closer to vehicle reference behavior compared to the PID control mode and no control(Fig.19).By adjusting the motor torque on both sides of the vehicle,a torque difference was generated (Fig.20),which reduced the steering radius from 106.2 m (the vehicle without control)to 75.7 m(the vehicle with dual-steering control;Fig.21).As was observed in the low-speed,small-radius steering tests,the steering track of the vehicle in this test revealed that the dualsteering mode also significantly reduced the steering radius of the vehicle (Fig.21).These results demonstrate the significance of the control effect of the dual-steering mode.
5.3.Minimum radius steering test
The test was mainly to test the ultimate steering performance of the vehicle,that is,the minimum steering radius that can be achieved when the real vehicle is running.During the test,set the road adhesion coefficient μ=0.8,and turned the steering wheel angle signal to the full range.
The minimum steering radius of the vehicle without control was 13.6 m,that is to say,the minimum space of 11 m was required for completing the steering without several reverse operation(Fig.23).The PID control can reduce the minimum steering radius of the vehicle,which was about 10.5 m (Fig.23).After the dual-steering control was adopted,the torque difference between the motors on both sides increased obviously.Through the control system adjustment,the minimum steering radius of the vehicle was about 8.7 m,which greatly reduces the space required for steering(Figs.22 and 23).
6.Conclusions
This study developed,simulated,and tested a dual-steering mode for multi-wheel hub motor driven vehicles.The proposed dual-steering mode is actuated by a two-layered DYC system.With this system,the vehicle reference behavior is determined according to the vehicle model and slip steering ratio.Through the ADRC yaw moment controller,the yaw moment demand is calculated in the higher-level layer.Based on the distribution rules of the torque distribution controller,the output torque of each outer hub motor is subsequently increased,and the inner hub motor is reduced in the lower-level layer.This dual-steering mode can be implemented by torque difference between the two sides of the vehicle.
By using the rapid control prototyping technology,simulations were carried out in the hardware-in-loop real-time simulation platform.The simulation results show that the dual-steering mode reduces the steering radius and improves the vehicle maneuverability compared with wheel steering without control.To further verify the effectiveness of the control strategy,the mode was experimentally tested on an eight-wheel hub motor driven vehicle prototype.The results of the real vehicle test indicate that the designed control algorithm can achieve DYC-based dual-steering during vehicle driving.
The vehicle test results are consistent with the simulation results,corroborating the conclusion that the dual-steering mode is superior to the traditional wheel steering mode in both maneuverability and steering stability.Therefore,from a mechatronic viewpoint,the proposed DYC-based dual-steering mode provides benefits in terms of vehicle environmental adaptability and safety compared with the traditional steering mode of wheeled vehicles that only rely on a steering mechanism.
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
This work was supported by the Weapons and Equipment Pre-Research Project of China (No.301051102).
杂志排行

Defence Technology的其它文章
- Numerical investigation of the failure mechanism of cubic concrete specimens in SHPB tests
- Experimental and numerical investigation of zirconium jet performance with different liner shapes design
- Effects of module number and firing condition on charge thermal safety in gun chamber
- Controllable combustion behaviors of the laser-controlled solid propellant
- Investigation of the shock compression behaviors of Al/PTFE composites with experimental and a 3D mesoscale-model
- The investigation of NTO/HMX-based plastic-bonded explosives and its safety performance