全天相机在多设备巡天中的应用*
2022-02-14高宝全平一鼎张晨
高宝全 平一鼎 张晨
(1 中国科学院紫金山天文台 南京 210023)
(2 中国科学技术大学天文与空间科学学院 合肥 230026)
(3 中国科学院空间目标与碎片观测重点实验室 南京 210023)
1 引言
CHES (Charging Events Survey)[1]是一个超大视场光学巡天项目, 由12台口径为280 mm的折射式望远镜和2台口径为800 mm的反射式望远镜组成. 其中单个280 mm望远镜视场为7°×7°, 总天区覆盖面积可达600 deg2. 该项目科学应用广泛,包括热木星和超新星搜索、引力波事件后随观测、高轨道空间碎片巡天等.
类似的很多巡天项目[2-3]共同面临的问题是整个系统的调度, 即如何让多台望远镜协同工作,高效地完成巡天计划. 其中, 如何有效利用天气, 是提高巡天效率的关键问题. 在观测条件优良的夜晚, 巡天计划的规划和执行相对简单, 只需要按既定的策略顺序执行即可, 而在阴雨天, 设备必然关停. 需要重点关注的是部分有云的天气, 此时部分天区被云覆盖, 而部分天区则相当干净, 完全满足观测的要求. 利用好这些干净的天区, 提高设备效率和利用率, 可有效提高系统整体观测效率.
目前较为普遍的设备红外云量检测仪[4-5]与可见光云量检测仪[6-7]都是通过云量粗略判断天气情况, 对局部区域天区的准确情况缺少判断, 因此也就无法指导观测天区的选择. 通过全天相机的图像, 则可以判断不同天区位置的云量情况来指导观测. 这样的做法以往已有一些工作[8-10]进行了研究, 这些工作都是通过基本云量情况判断天区天气情况, 进而评估对应天区是否可以进行观测, 对于多设备同时调度巡天情况, 缺乏更细致信息, 比如更小区域的可探测极限星等情况. 为克服这些局限, 我们采用一台全天相机来监测本地天区, 对全天相机观测图像进行图像的天文定位和测光处理方法研究, 获取当前时刻本地天区可观测源的天球坐标和星等值, 利用这些信息指导多设备的巡天,而不再是简单地通过云量信息去指导观测.
此外, 全天相机的观测图像, 也可以用于更广泛的科学目标, 尤其是高亮度目标. 如对全天相机观测到的图像星像进行测光, 可通过光变曲线法寻找亮于10星等的掩星, 凭借超大视场覆盖优势可以实时监测超新星爆发、流星与过境目标, 探测时域天文热门事件. 有很多项目正在开展类似的工作, 比如早期的SuperWASP (Super Wide Angle Search for Plants)与HATNet(Hungarian-made Automated Telescope Network)[11]巡天项目, 二者均使用多个设备扫描整个天区, 对观测图像进行测光处理, 通过掩星测光的方法寻找恒星周围测光星等值在10-13范围内的掩星. 而MASCARA (The Multi-site All-Sky CAmeRA)光学巡天项目, 由5个固定指向的大视场望远镜组成一个覆盖全天的光学观测系统, 对亮星目标进行测光处理, 建立光变曲线库, 致力于寻找测光星等小于8的掩星[12]. 美国航天局(NASA)在全球放置多个全天相机, 通过对获取到的图像和视频的一系列处理, 实现流星监测和流星轨道提取.
为实现这些应用和科学目标, 首先要实现图像处理、天文定位和光度测量等一系列的工作. 由于全天相机的光学视场超过100°, 其图像与一般的光学天文图像, 尤其是在投影关系方面差别很大, 因此需要一些特殊的处理. 本文便是阐述了我们在处理这些问题时所采用的方法, 在第2节中介绍了全天监测系统所用的观测设备; 第3节阐述了我们对全天相机观测图像进行天体测量求解的方法并分析了精度; 第4节阐述了我们采用的测光、天区划分和可观测性评估方法; 第5节对本文工作进行了总结并展望了下一步工作.
2 设备和性能
为实现较高的性能, 我们定制了CHES项目的全天相机, 主要由相机和镜头两个部分组成. 其中, 相机为Finger Lake Instruments的ML50100 CCD (Charge-Coupled Device)相机. 该相机可以冷却至低于环境温度45°, 相机以16 MHz的速度快速读取16-bit分辨率图像. 为了应对月夜观测, 对阱深为40300电子的CCD设置了800倍的防晕染保护, 从而有效防止月球曝光溢出, 影响图像质量. 该相机的主要性能参数见表1.

表1 CCD传感器基本参数Table 1 Basic parameters of CCD sensor
光学镜头采用了定制超大视场镜头, 光学视场135°, 基本覆盖CHES巡天时会达到的天区范围.该镜头口径7.8 mm (F/2), F为光圈值, 焦距为15.5 mm, 在采用ML 50100相机后, 可实现图像视场135°× 122°, 比例尺1.2′/像素.
为了验证全天图像观测系统的性能与探测能力, 我们在测光夜采集了一系列本底图像、暗流图像与观测图像, 经处理得到不同曝光时间下的可探测极限星等, 结果如图1. 可以看到曝光时间为10 s时极限星等可达到10.4星等, 因此我们在实际运行时, 均采用10 s的曝光时间.
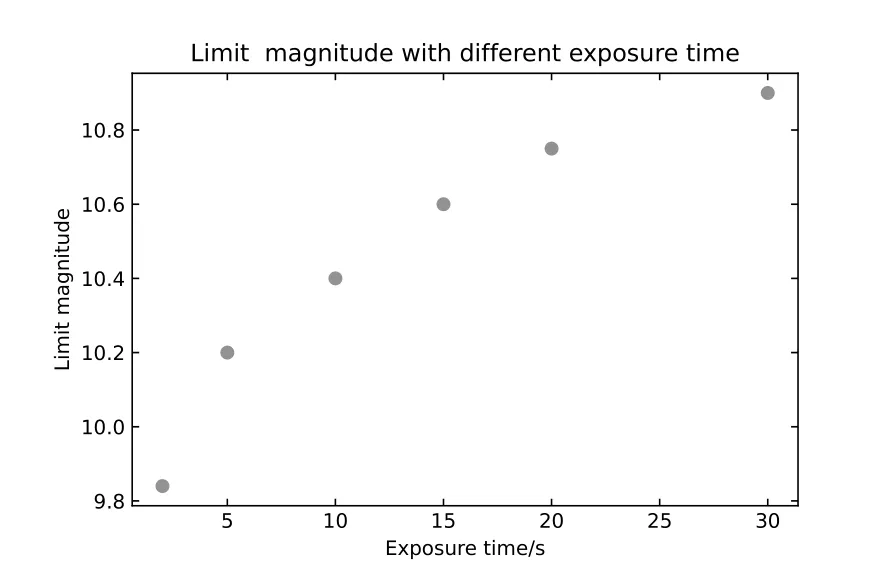
图1 全天相机的可探测极限星等随曝光时间的变换关系Fig.1 The variation of limit magnitude of all-sky camera with exposure time
3 全天图像天体测量
全天图像的天体测量是所有工作的基础, 图像具有视场大、高度非线性成像特征, 因此传统的天文测量方法不再适用.
3.1 图像预处理与天体测量
首先对观测初始时采集的本底、暗流图像进行预处理, 获取最佳的本底图像与暗流图像用于校准处理. 对每一幅本底图像进行扫描处理, 计算每个像元多次观测值的平均值, 得到最佳的本底图像, 并计算最佳本底图像的平均值μ与标准差σ, 用于评估暗流的质量. 对于任意的一张暗流图像均值μ′, 如果满足如下表达式:

则保留该暗流图像, 用于计算最佳暗流图像, 否则舍弃. 对所有符合上述条件的暗流图像, 计算每个像元的多次观测平均值, 得到最佳暗流图像. 由于全天相机图像的大尺度光照不均匀, 导致了平场图像的稳定性不足, 会降低光度测量的质量, 因此在图像分析过程中并没有采用最佳平场图像.
全天相机图像视场135°× 122°, 存在高度非线性径向扭曲, 传统的心射正切(Gnomonic, TAN)[13]投影在图像视场接近90°时已经发散, 因此本文选择了天顶等距(Zenithal equidistant, ARC)[14]投影.该投影方式以天球上一个点为中心, 将天球映射到平面上, 其特点是经线将投影为源自中心的直线, 纬线将显示为等间距同心圆弧, 且不受视场大小的影响. 为了便于对比理解, 以天顶为中心, 标记为90°, 绘制心射正切投影和天顶等距投影, 如图2所示, 图中数字的单位是度. 由图可知在视场超过90°以后, 传统的心射正切投影不再适用.
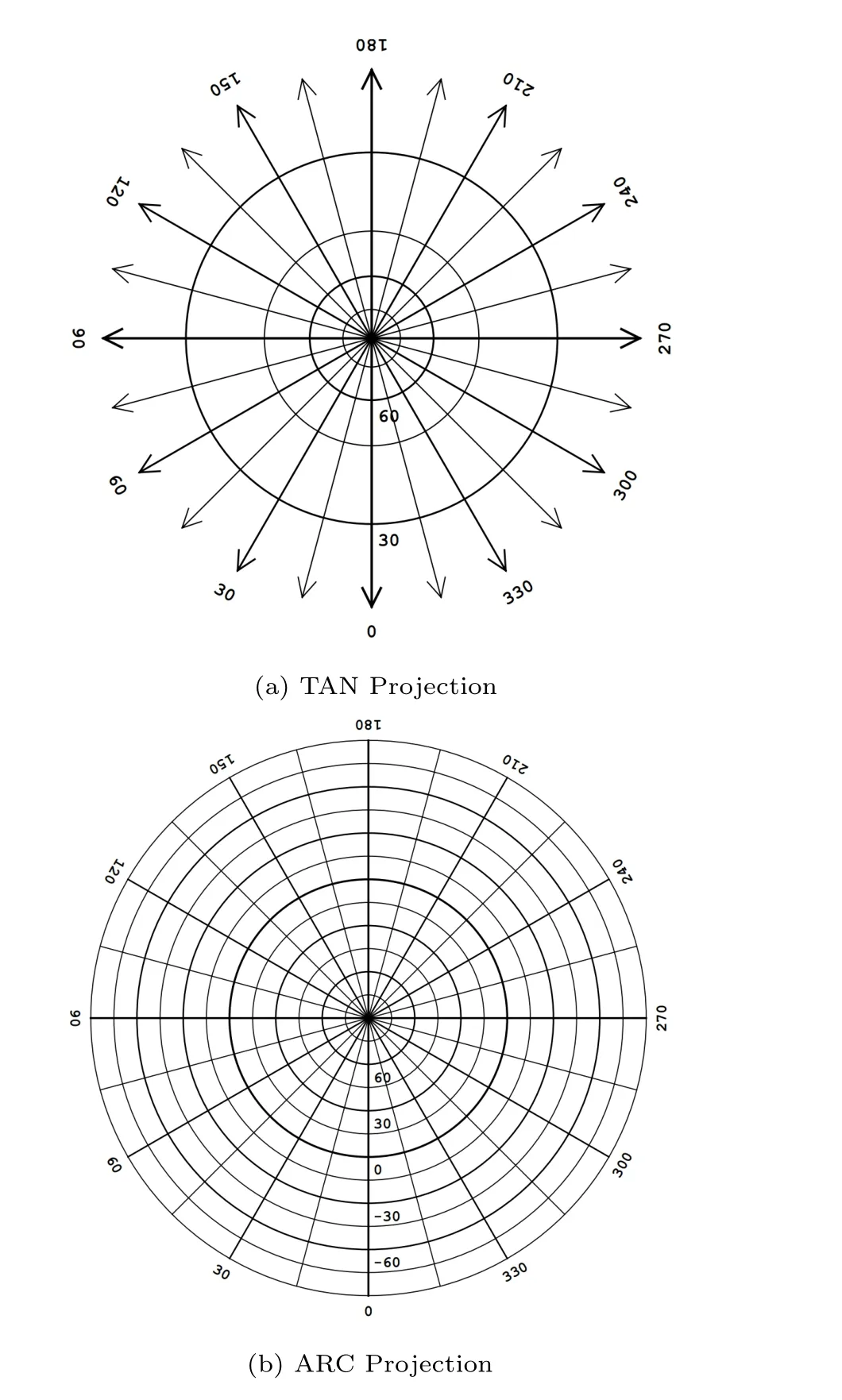
图2 (a) TAN投影在地平线时已经发散, (b) ARC投影没有限制.Fig.2 (a) TAN projection diverges at horizon, (b) there is no limit in ARC projection.
将天球以ARC投影方式投影到以图像中心为切点的切平面中, 建立一个中间坐标, 并求解该坐标与图像坐标之间的对应关系, 即底片常数, 便完成了图像的天体测量. 其具体的步骤如下:
(1)在实际工作阶段, 全天相机的观测指向是已知的. 在试验和方法验证阶段, 则无法知道准确的指向. 我们将图像以底片中心点附近截取了大小为400× 400的子图像, 由于该范围的张角大致为10°且取自光学视场的中心部分, 与一般的天文图像相比投影关系差别不大, 因此可使用天体测量计算软件astrometry.net[15]求解该子图像初始WCS(FITS World Coordinate System)信息, 计算图像中心像素坐标(x0,y0)对应的赤道坐标(α0,δ0);
(2)我们采用了包含250万以上恒星的星表Tycho-2作为天体测量参考星表. 根据上一步得到的相机指向信息, 结合相机视场参数, 从Tycho-2星表中检索望远镜视场内亮于8星等的参考星. 将天球以ARC投影到以图像像素中心(x0,y0)对应的(α0,δ0)为切点的切平面上, 对应的切平面中间坐标系的映射坐标(ξ,η)可计算如下:

上式中,c表示参考星在天球中距离投影中心的角距离, (α,δ)指参考星的赤道坐标. 然后使用Sextractor[16]软件扫描全天图像获取图像星像量度坐标(x,y), 用于后续匹配使用与底片常数求解;
(3)通过步骤(2)可以得到所有参考星赤道坐标(α,δ)对应的中间坐标系映射坐标(ξ,η), 实现参考星到中间坐标系的转化. 为了进一步得到参考星在图像中的像素坐标(X′,Y′), 利用fitsh[17]软件包中的grmath命令匹配映射坐标(ξ,η)和星像量度坐标(x,y), 对匹配成功的星像对进行多项式拟合, 建立参考星映射坐标(ξ,η)到图像像素坐标(X′,Y′)的映射关系. 这一步得到的参考星在天文图像中的像素坐标(X′,Y′)与实际的量度坐标(x,y)存在差异, 因此我们在参考星像素坐标(X′,Y′)半径为r像素的圆区域内搜索, 如果存在唯一的图像源, 则记为匹配成功;
(4)考虑到望远镜镜片的径向扭曲, 随着参考星位于图像中的理想位置从视场中心到边缘的移动, 对应的搜索半径r也应当随之增加. 可将初始搜索半径r设为5像素, 参考星在图像中的位置与图像中心距离R每增加20°,搜索半径r增加5像素,图3为一帧观测图像的匹配结果, 其中用黑色标出了成功匹配的7988个星像对;

图3 图像中星表星的分布Fig.3 The distribution of catalog stars in image
(5)对步骤(4)中匹配成功的所有星像对, 建立映射坐标(ξ,η)与量度坐标(x,y)之间的拟合关系,求解底片常数. 由于全天图像存在高阶径向扭曲,在拟合中加入高阶多项式, 拟合模型如下:

上述拟合系数(a00,a10,a01,b00,b10,b01)用于消除零点差、比例尺、旋转等各种误差, 其余多项式参数apq和bpq即为扭曲模型参数,p和q分别为x和y的阶数,N则为多项式阶数.
3.2 结果与分析
通过第3.1节得到的全天图像底片常数, 可以得到图像中任意源对应的天球坐标. 在进行多项式底片常数拟合时需要注意多项式阶数N的选择, 一般N越大拟合效果越好, 但是过高的拟合阶数也会导致额外的模型误差. 本文通过对不同大小N进行多项式拟合测试, 在N=5阶时效果最佳.
使用最终的底片常数计算恒星的实测赤道坐标(α′,δ′), 与星表中对应的赤道坐标(α,δ)进行比对, 并计算所有亮于8等星的恒星赤经和赤纬方向误差的均方根RMS (Root Mean Square), 用于评估天体测量的计算精度. 通过计算可得, 在赤经和赤纬方向的测量误差RMS分别为12′′与11′′, 而设备像元分辨率为76′′, 整体的测量精度约为0.15像素.图4展示了观测图像中探测到的源赤经方向和赤纬方向天体测量误差分布图, 其中ΔRA和ΔDec分别表示赤经方向和赤纬方向的误差. 由图可知, 在赤经方向和赤纬方向测量误差均小于1.2′, 即一个像素内标准差约0.2′.

图4 天体测量误差分布Fig.4 The distribution of astrometric calibration in image
4 大气消光与天区划分
全天图像中任意源可以通过第3节得到的天体测量解来计算对应的天球坐标, 通过与星表对比,确定测光星等和星表星等间的星等差, 用于计算大气消光系数. 最后需要对全天图像进行天区划分,研究不同天气状况下的天区可观测信息.
4.1 测光与大气消光
在10 s曝光时间下全天图像星像理论星等可达10.4星等, 但由于全天相机设备的整体测光精度并不高, 因此我们对全天相机图像的科学目标研究主要集中在亮星目标. 采用广泛应用的测光处理软件Sextractor, 对视场中理论星等大于8等的星像分别进行孔径测光与环形测光, 得到其流量信息,并计算出对应的仪器星等, 其中孔径半径为5像素,环的内、外半径分别为10和15像素. 同时利用3σ中点裁剪方法估计的背景亮度值信息以及流量的泊松统计误差计算每颗星的测光误差, 测光误差值用于下一步的大气消光处理. 图5为一张图像中所有亮于8等的星的测光误差分布图, 从图中可知, 在星等值小于5时, 其测光精度小于0.025 mag,随着目标星等值的逐渐增大, 测光误差也逐渐增大, 当测光目标星等值为8时, 整体测量误差小于0.2 mag.

图5 测光误差分布Fig.5 The distribution of photometric magnitude error
全天图像视场很大, 图像中星像越接近地平线, 大气质量带来的消光对其影响越大, 因此有必要对图像星像进行大气消光处理. 根据大气消光理论可知m-m0=kM(z), 通过拟合该公式求解布格消光系数, 改正图像源由于大气质量引起的测光误差, 其中m、m0分别表示图像源测量星等与星表中理论星等,k为布格消光系数,M(z)为天顶距z对应的大气质量, 具体表达式[18]如下:

在实际求解过程中, 为了避免低信噪比星像与星体颜色带来的测光误差影响, 筛选图像中星等值小于8且其色指数在1.2-1.5范围内的星像, 计算该部分星像测光星等和参考星等之间的星等差Δm以及对应的大气质量M(z), 代入公式m-m0=kM(z)中求出消光系数k. 图6为大气消光值随大气质量变化的拟合结果, 实线表示采用最小二乘法(Ordinary Least Squares, OLS)的拟合结果, 受限于全天相机设备较低的测光精度, 拟合效果并不是很好, 但可以有效抵消大气质量带来的消光影响.

图6 大气消光拟合Fig.6 The fitting of atmospheric extinction
4.2 HEALPix天区划分
我们采用HEALPix (Hierarchical Equal Area isoLatitude Pixelation)来进行天区的划分.HEALPix[18]是球体的等距等面积等纬度像素化的首字母缩写, 顾名思义, 这种像素化可细分球形表面, 其中每个像素与每个其他像素覆盖相同的表面积, 这些特点使其非常符合全天图像进行巡天指导观测的需要. 使用HEALPix划分全天图像区域,可以根据巡天设备数量、单个望远镜天区覆盖面积与特定区域的巡天等变量因素, 实时将天区区域划分不同分辨率的区域. 图7为HEALPix划分分辨率的基本原理图, 用Npix表示HEALPix像素数,Nside表示像素网格分辨率参数, 从左上角顺时针方向移动, 像素网格分辨率参数Nside= 1、2、4、8, 对应的像素数量Npix= 12、48、192、768, 黑色点表示每个像素区域的中心点, 由图可知所有像素中心位于4×Nside-1个恒定纬度的圆环上.HEALPix的基准分辨率由12个像素组成球面, 通过对现有分辨率的每个网格进行4等分实现分辨率的提升, 则HEALPix像素分辨率的划分表达式如下:

图7 HEALPix球体分区的正视图[19]Fig.7 Orthographic view of HEALPix partition of the sphere[19]

其中,n表示像素网格的划分层数.
CHES单个望远镜天区覆盖面积为49 deg2, 因此采用HEALPix划分全天图像区域时, 尽可能使划分后的子天区覆盖面积与CHES单个望远镜覆盖的天区面积相近或者成倍数关系, 基于(8)式,HEALPix将整个球面分割为3072个像素区域, 由于该全天相机监测系统站位于北半球, 因此我们将全天图像划分为Npix= 1536个像素区域, 即HEALPix半个球面区域.全天图像星像坐标用赤道坐标或地平坐标表示,而HEALPix图像的像素坐标采用球坐标,因此需要建立全天图像与HEALPix图之间的映射关系从而实现全天图像到HEALPix图像的转换, 其具体步骤如下:

(2)通过步骤(1)可以将全天图像中的所有源映射到HEALPix像素区域, 根据图像源位于HEALPix中的像素区域信息, 可以获得每个像素区域可观测源的数量和极限星等值.
在第3节与第4.1节中分别实现了坐标校正与图像的测光和消光处理, 将改正后的所有图像星像按照上述步骤转换为HEALPix图表示.
全天相机在多设备巡天中的应用主旨思想是根据某一块天区在全天相机中的可探测星等, 来表征该天区的天气情况, 用于指导观测. 如果天区某一个区域极限星等可达到全天相机的极限星等,表明该区域天气晴朗, 可进行观测; 而该区域的极限星等只有3等星甚至完全不可见时, 则说明该区域无法进行观测, 同时可根据天区划分区域内的极限星等排序进行观测优先级的规划. 本文分别对3种不同天气情况的全天图像进行了处理, 结果如图8所示, 其中3帧图像从左到右依次为晴夜(a)、局部多云(b)与厚云(c)天气下观测获得. 由图可知,在晴夜时, 天区每个区域均可观测; 在天区局部有云时, 只有部分区域是可观测的, 这些可观测区域的天区位置、极限星等是巡天观测的重点; 当天区在厚云覆盖时, 通过肉眼已经很难判断哪些区域可以观测, 如果采用传统的云量判断法, 当前天区无法进行正常观测. 但通过对全天图像进行天文定位和测光处理, 可以精确得知图像中星像对应的坐标和星等, 即哪些区域可以进行观测. 只需将巡天设备指向这些区域即可观测, 避免了设备的无效观测或者停止观测. 通过对这3幅图像的对比, 验证了通过提取图像源的位置和探测星等来表示天区的可观测程度在指导巡天观测中应用是可行的.

图8 3种不同天气情况观测图像, 从左往右依次是晴夜图、多云图和厚云图.Fig.8 Observation images of three different weather conditions, from left to right: clear sky, partly cloudy and overcast.
使用上述天体测量、测光与大气消光、HEALPix天区划分等步骤将这3幅观测图像转换为用于指导观测的HEALPix图. 需要指出的一点是, 考虑到全天相机设备测光精度低, HEALPix图像转换中剔除了流量值低于2倍背景值的星像源,最终的结果如图9所示. 图中颜色表示可探测的极限星等大小, 天区可探测区域及最暗星等可由HEALPix图像直观得知. 由图9可知, 在晴夜时, 所有的区域的极限星等均达到了9.8, 可观测性很好.局部有云时, 部分天区由于云层覆盖, 可探测的极限星等小于3, 因此无法观测, 但仍有大部分区域的极限星等可达7, 即这些区域可进行正常观测. 在云量很厚的情况下, 整个天区几乎完全被云层覆盖,零散的亮星可以通过肉眼捕获, 而通过处理该天气状态下获取的全天相机观测图像,可提取暗于6.8星等的探测源, 表明在该天气状况下, 虽然大部分区域由于云层而无法进行观测, 依旧有部分天区可进行观测. 同时, 在自动化观测下, 可根据巡天设备指向的赤道坐标计算其位于HEALPix中的索引区域,返回该区域可观测星等, 避免了望远镜设备的无效运行.

图9 3种不同天气情况HEALPix图像, 从左往右依次是晴夜图、多云图和厚云图.Fig.9 HEALPix images of three different weather conditions, from left to right: clear sky, partly cloudy and overcast.
5 总结与展望
为提高多设备巡天观测的效率, 提出了利用全天相机监测系统获取的本地天区可观测星像星等和位置信息指导多设备巡天的研究方案. 本文首先介绍了全天相机监测系统所用的观测设备, 并评估了设备的性能. 全天图像具有视场大、高度非线性成像特征, 传统的天文测量方法不再适用, 因此本文采用了一种天文等距投影与多项式函数结合的方法, 可实现全天图像亚像素精度的天文定位. 为解决大气质量导致的图像星像测光误差, 通过对图像中的亮星测光确定星等差值进行大气消光拟合,校准星等值. HEALPix方法可根据巡天阵列单个望远镜覆盖的天区面积将全天图像划分为多个天区, 并建立全天图像与HEALPix图像之间的映射关系, 采用HEALPix图像表示全天图像. 最后采用3种不同天气状况下的观测图像对本文的图像处理、天文定位、测光、HEALPix天区划分与转换等方法进行了验证. 通过上述工作, 完成了全天图像在巡天观测指导中的方法研究, 后续在此基础上, 可进一步研究全天图像的科学目标与利用图像观测信息制定多设备的调度方案.
