前视避障声呐综述
2022-02-13姜科王忠康
姜科 王忠康
(第七一五研究所,杭州,310023)
声波是海洋信息远距离传播的唯一载体,高分辨声成像声呐在海洋探索、深远海开发以及海洋防卫等领域中发挥着重要的作用。与光学成像相比,声学成像分辨率低,但是在探测距离上,成像声呐有其无法媲美的优势。尤其在浑浊水域,水下光学视频成像完全失效,只能使用高分辨率的成像声呐系统,当前世界上主流的水下成像声呐产品有多波束声呐、侧扫声呐、合成孔径声呐[1]、声透镜声呐[2]。
侧扫声呐扫描区域小,成像需要载体不断移动,使得对回波信号处理变得复杂。合成孔径声呐理论,则要求声呐基阵作严格的直线运动,算法要求较为苛刻,且体积庞大。声透镜成像则受到技术的限制难以达到理想的效果。若水中航行器想通过水下成像设备来观察水中环境情况,则只有多波束声呐系统能达到要求。多波束成像声呐根据应用的场合,可以分为多波束测深声呐和前视声呐。多波束测深声呐大多用于水下地形的勘测[3-4],前视声呐可用于水下导航避障[5-8]。
1 前视声呐组成和工作原理
前视声呐是成像声呐中的一种,也是主动声呐,主要由发射基阵、接收基阵、信号处理和显示设备等组成。水声换能器按照特定几何结构(如球形、柱形、平板形或线列形等)排列组成发射基阵,将发射机产生的电信号转换为声波信号向扫描方向发出。声波信号在水下传播时,会被岩石、鱼类、山体等目标反射,产生回波信号。接收基阵将回波信号转换为电信号传输至信号处理单元。信号处理单元对接收到的电信号进行采集与处理,并形成目标图像信息。最终,各方向上的目标图像信息被上传至显示设备进行整理和显示,得到波束方向上的水声图像。
按照成像特点,前视声呐系统可分为单波束机械扫描声呐、多波束预成电子扫描声呐和三维成像声呐。单波束机械扫描声呐通过对单波束进行机械旋转来完成全方位或固定区域内的扫描探测,每次只能形成一个窄波束。这类声呐结构简单,价格便宜,但难以达到实时性要求,且容易受到运动载体的影响而出现图像失真。多波束预成电子扫描声呐可同时接收并处理多个换能器阵列的采集信号,因此时间成本更小,系统图像分辨率也更高。三维成像声呐能够获得目标的三维空间图像,但研发成本高,实现难度大,目前仅有少数国家开展了水下三维声成像系统的研究与设计。
2 前视声呐的发展
2.1 单波束机械扫描声呐
单波束机械扫描声呐虽然成像效率低,但是在对成像实时性要求不高的场合也有应用。图1是加拿大IMAGENEX公司生产的一款单波束扫描声呐IMAGENEX 881A成像效果。
该产品被广泛地应用于各种级别的遥控无人潜水器、自主式水下航行器和无人水下航行器,用户可根据应用需求对工作频率进行选择,距离分辨率可达10 mm,在1 MHz工作频率下,波束宽度为0.9°×10°,最大工作深度可达6000 m。中国海洋大学研制的AUV“神龙号”,采用的前视声呐系统为英国Tdtech公司生产的Super Seaking DST数字机械扫描式前视声呐[14]。随着声呐换能器技术、集成电路的不断发展,单波束成像声呐已经渐渐退出我们的视野,取而代之的是多波束预成电子扫描声呐。
2.2 多波束预成电子扫描声呐
多波束预成电子扫描声呐成为前视声呐的主流应用产品,其成像效率远高于单波束机械扫描声呐,且成像分辨率更高,但是该类成像声呐产品成像视野受到限制,无法达到单波束机械扫描的全方位视角。下文对国内外典型产品作简要的介绍,并进行对比分析。
EchoPilot FLS 2D是Daniamant公司研发的前视声呐,该产品最大特点是小巧便捷以及其独特的换能器结构设计,是专门为海上救援而设计的。图 2为EchoPilot FLS 2D成像系统的组成部件,该设备配备了7英寸(对角线)TFT LCD全彩显示器,当回声较强时其显示色彩不同,给人以更佳的视觉效果,而且能够获得更多关于海底的自然信息,显示效果如图 3所示。用户可根据实际应用,选择专业传感器或标准传感器。2D前视声呐显示更新时间0.5 s,最大前向探测距离200 m,最大探测深度100 m。

图 2 EchoPilot FLS 2D有关组件

图3 EchoPilot FLS 2D显示效果
图4为BlueView的便携式二维成像声呐,工作频率900 kHz,视角范围达130°,最大探测距离100 m,距离分辨率1.3 cm。所有的M900系列声呐,无论是移动探测或固定地点安装,均能实时传输图像和数据,视频输出帧率最快27 Hz,可应用于ROV实时导航、目标探测/识别、目标跟踪、避障、操作监控、区域/结构物检查等场合,其成像效果如图5所示。

图4 Teledyne BlueView便携式二维成像声呐
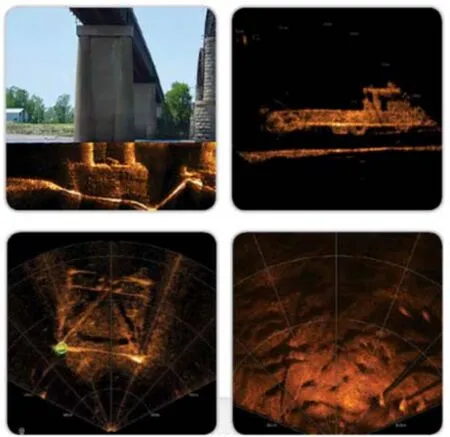
图5 BlueView成像效果图
图6为Gemini 1200ik多波束成像声呐,工作深度350 m,它提供了一种紧凑型实时高频成像的解决方案,这使得它可被安装到中小型船只,也可安装在浅水作业的大型船只上。独特的设计使它可以非常容易地安装到不同的水下潜器和平台上。该声呐工作频率为1200 kHz,优化的信号处理电路设计使声呐能够提供极其清晰的实时图像。该设备集成了一个声速计,能够帮助声呐头进行图像锐化和精确测距。120°的水平覆盖范围为使用者提供一个印象深刻的视野范围。采用的 chirp处理技术,确保Tritech Gemini 1200ik多波束图像声呐能够提供更远距离的高分辨率成像,而集成的VOS(Vectory of Sound)传感器确保了图像的高精确度显示。此外该成像声呐还可以装配于潜水员头盔面罩上方,通过水下视频眼镜呈现水下环境情况,如图7所示。

图6 Gemini 1200ik

图7 头戴式安装
IMAGENEX MODEL 837 “Delta T”2000 m是一款高分辨率、多接收器的声呐系统,在个人的笔记本电脑和专业PC上都能运行,如图8所示。这款设备声波阵列的设计实现了以 120°×20°视角的视频探测、移动物体探测、障碍物躲避应用,同时260 kHz 的声学频率带来100 m以内的灵敏探测。在小范围内,照片更新率达到20次/s,而在100 m的范围内,也有超过5次/s的表现。经过硬性阳极化处理的外壳,保证了该设备可以工作在 2000 m深的水域。该成像声呐没有笨重的外置控制箱,所以便于装配在ROV和AUV上,且价格便宜。

图8 837“Delta T”2000 m多波束避障声呐
中国船舶第七一五研究所研制的一款二维前视避障声呐(DMP125),如图9所示,工作频率125 kHz,探测距离可达500 m,可探测120°×20°视角范围内的移动目标和静止目标,距离分辨率达到10 cm,方位分辨率小于1°,可实现碰撞危险自动分级报警。通过充油设计,使得设备可工作于 1200 m水深。该设备对山体的成像效果如图10所示。

图9 DMP125前视避障声呐
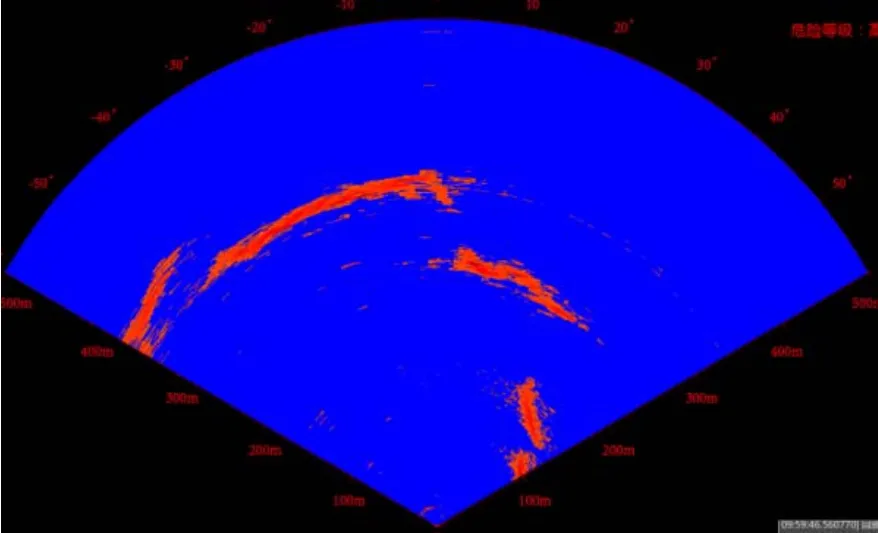
图10 山体成像
上述几款常见的多波束二维前视声呐关键技术指标见表 1。多波束预成电子扫描声呐在技术水平上并没有太大差距,虽然表格中部分指标存在一定的差异,国内的设备是基于实际应用场景进行定制的。通过表中产品的成像结果可以看出,二维成像声呐所展现的目标信息有限,只能获得被测物的距离、方向等信息,复杂环境下,不利于对小目标的探测与识别。三维成像技术能够在此基础上获得复杂的3D图像,图像立体、完整、清楚。
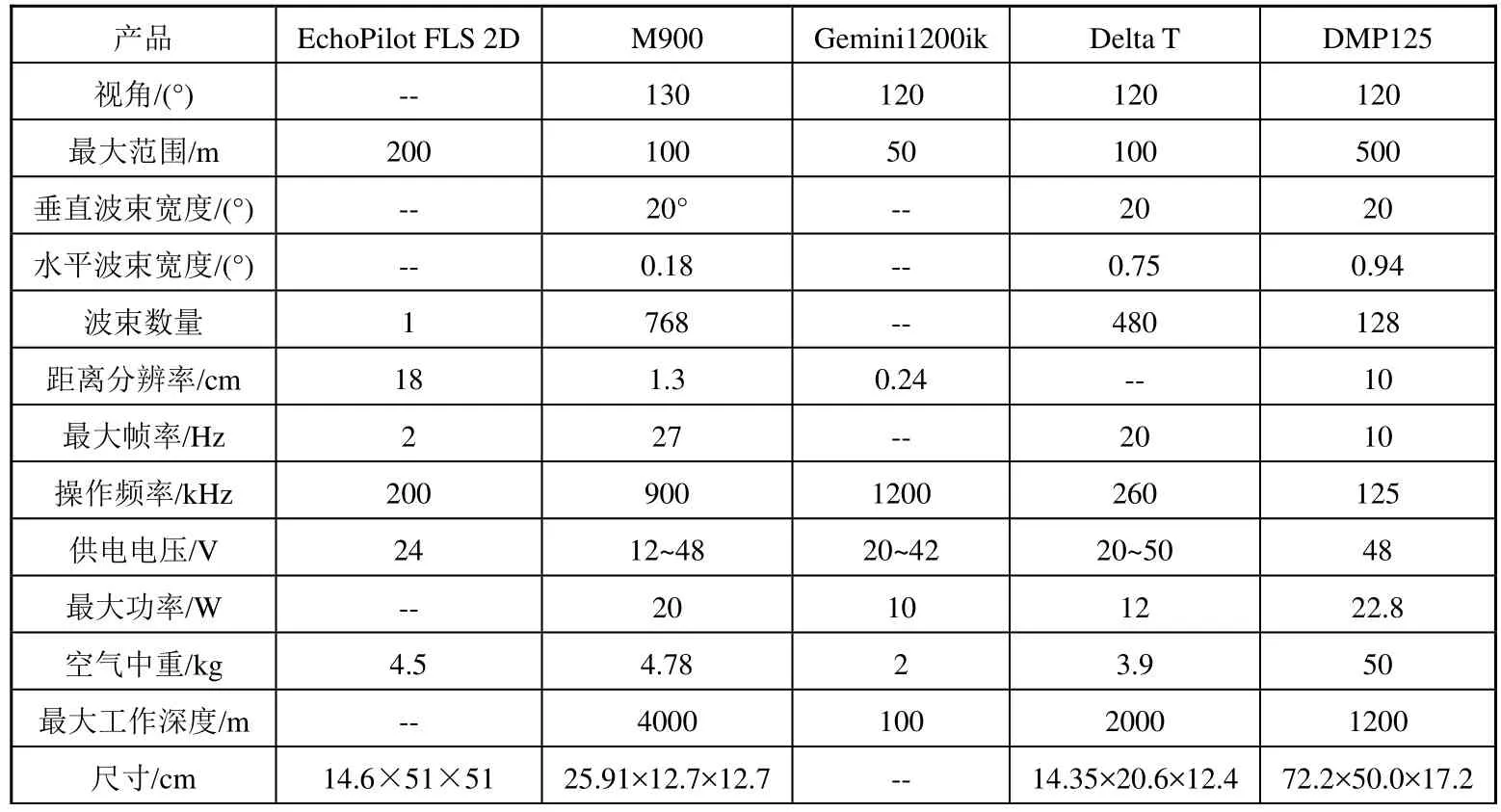
表1 二维成像声呐关键技术指标对比
2.3 三维成像声呐
美国Farsounder公司研发的FarSounder-500和FarSounder-1000产品,如图 11所示。其中FarSounder-500水平探测角度范围90°,最大探测距离 500 m,其三维成像效果如图 12所示。FarSounder-1000探测角度范围有两种模式,分别为90°和 60°。在探测范围为 60°时,其探测距离可达1000 m。此外该系列前视声呐拥有自动检测底部、测量最小深度、多种显示模式(包括日间模式、黄昏模式、夜间模式和红色模式)以及导航信息显示功能等,设备安装效果如图13所示。

图11 FarSounder系列
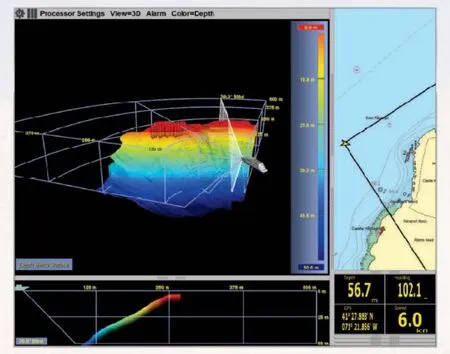
图12 FarSounder三维成像效果图

图13 安装示意图
Daniamant公司研发的EchoPilot FLS 3D是一款三维前视声呐产品,如图 14(a)所示,该设备可以对船只前方水下场景进行三维显示,海底的地形和潜在的危险可以真实性表示出来,显示效果是一个实时的声呐图像,而不是渲染成的3D效果,如图 14(c)所示。无论外壳形状如何,两个具有伸缩结构的换能器都能确保完全覆盖前向,前向探测角度范围60°,垂直探测范围90°,向前探测距离可达200 m,探测水深100 m。

图14 EchoPilot FLS 3D系统组成及成像效果
Echoscope4G®是英国Coda Octopus公司研制的第四代实时三维成像声呐,如图 15所示。该系列产品是世界上分辨率最高的实时三维成像声呐,距离分辨率高达2 cm,其最小探测距离0.5 m,最大探测距离150 m(发射信号频率240 kHz),最大刷新速率20 Hz,具有双发射基阵,支持双频工作模式(375/630 kHz)或者三频工作模式(240/375/630 kHz),后期可通过软件选择。产品具有轻小、低功耗、低成本、可编程 TVG以及拥有应用于ROV/AUV的标准百兆以太网等特点。通过其特有的渲染技术,即使在能见度低的水中,该设备依然能够对移动物体进行清晰成像,并且能够区分不同的物体,成像效果如图16所示。

图15 CodaOctopus:3D
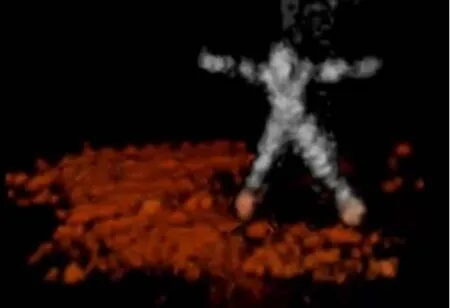
图16 Echoscope4G®成像效果
该公司已经将三维成像声呐产品做了进一步的升级,于2015年提出为潜水员提供3D增强现实技术的概念,2019年完成其第一代产品DAVD的研制,2021年发布了第二代产品Gen 2 DAVD并应用于美国海军,如图17所示。

图 17 第二代DAVD和Echoscope C500
潜水监督员可以使用随附的4G USE DAVD版软件套件从水面控制DAVD系统,能够控制显示给潜水员的所有信息,包括发送关键信息、详细的分步任务说明、图纸、图像甚至增强现实视频的能力,如18所示。

图18 通过DAVD观察数字信息提示
借助于第二代DAVD产品,潜水员在能见度为零的条件下工作,不仅同时支持第一视角和第三视角观察水下环境,如图19所示,而且水面潜水监督员可以实时观测潜水员的情况,并与之进行信息交互。该设备在确保潜水员水下执行任务安全的同时,可极大提高军队水下特种作战能力。
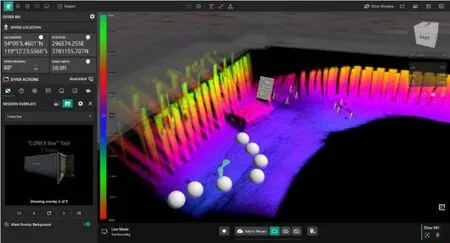
图19 三维显示水下地形
英国Coda Octopus公司是当前三维成像声呐技术的国际领军企业,其最新产品可以说是未来三维成像声呐发展的全球风向标,水下3D增强现实技术也是水下探测设备显示方式的重点研究方向。目前,国内在水下视觉增强系统研究上基本为空白,可以借鉴 AR眼镜显示器技术,并将其应用到水下成像系统,在此基础上研发相关产品。国内对三维成像声呐进行研究的单位主要有苏州桑泰、中国船舶第七一五研究所、浙江大学、哈尔滨工程大学等。
图20为苏州桑泰自主研制的一款便携式高分辨率水下三维成像设备,其开角范围为48°×48°,距离分辨率可达3 cm,具有体积小、重量轻、低功耗等特性,可由潜水员在水中直接操作,通过对目标的视角切换、立体观察,使目标搜索和定位更加简单直观,可满足潜水员手持或者搭载 ROV、UUV等平台使用。

图20 手持式三维成像声呐
第七一五研究所和浙江大学共同研制的DZT型三维声学摄像声呐(图21),工作频率300 kHz,能够对200 m以内、50°×50°开角范围的目标实时成像,距离分辨率2 cm,显示帧率最大10 Hz,具有运动目标实时检测、动态分类和三维目标识别等功能。

图21 DZT型三维声学摄像声呐
图22为用DZT型三维成像做喂鱼成像效果的测试。图中成像的场景为:三维图像声呐入水深度50 cm,并保持静止不动,其下方3 m处用绳索固定着一条长约50 cm的鱼,将一团粉末状饵料投入水中,诱饵球逐渐下沉。
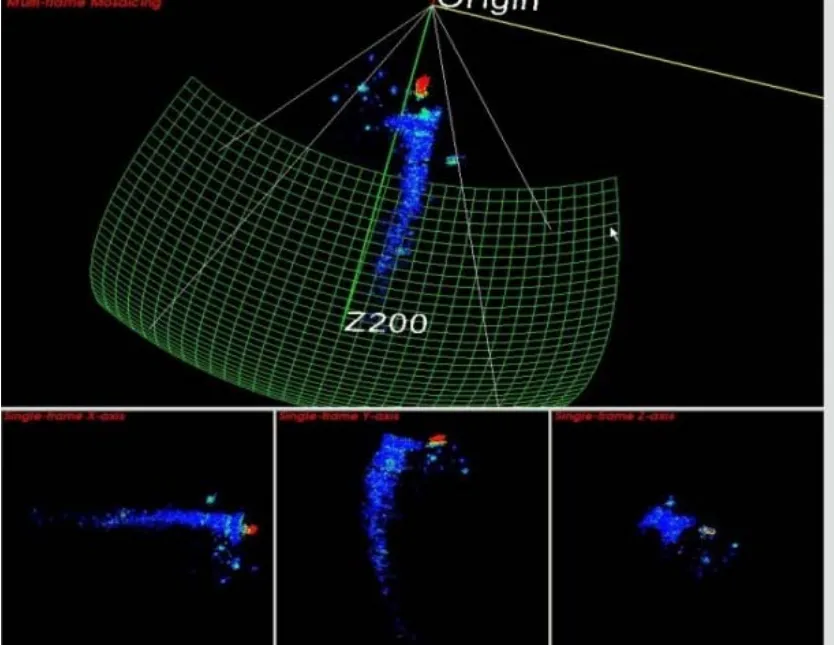
图22 喂鱼场景成像效果
国内外不同三维成像声呐产品的关键技术指标对比见表2。根据上述对比分析可以看出,在三维成像声呐方面,国内外水平存在较大的差距。美国已经将增强现实技术与三维成像声呐技术相结合,并应用于海军装备。国内三维成像声呐起步晚,部分功能已达到国外先进水平,但在图像处理上与国外还有较大的差距。
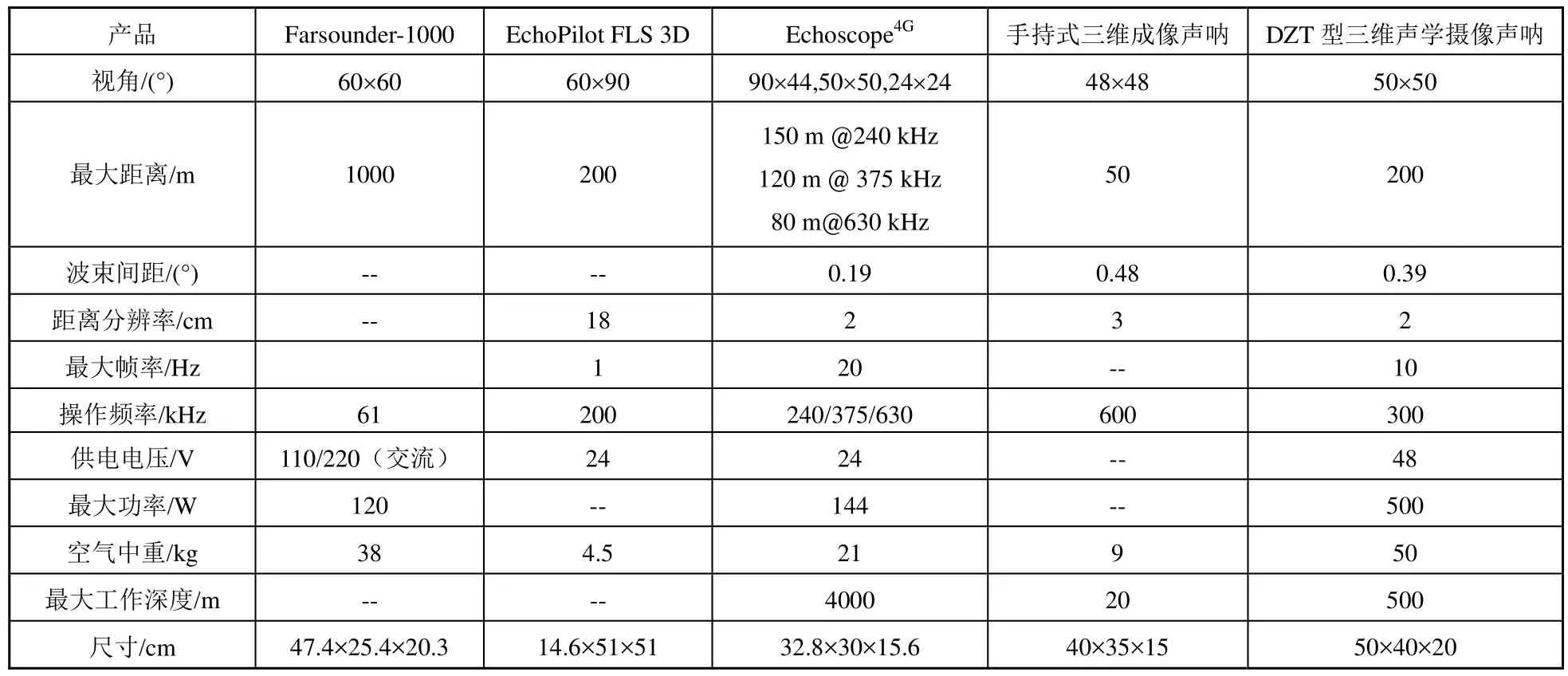
表2 三维成像声呐关键技术指标对比
三维成像声呐在计算量上远高于二维多波束成像声呐,而且需要复杂的图像处理计算,因此就必须使用高性能处理器,比如TI公司的6678DSP处理器、DM8127等。浙江大学使用DM8127处理三维成像声呐的实时图像[9];中科院声学所王鹏等人使用 TMS320C6678处理器来处理三维成像声呐的后置信号处理算法[10]。虽然6678计算性能强大,但其计算处理还是以串行的方式,而GPU拥有强大的并行处理能力[11-12],且已经被使用于三维成像声呐的设计[13-14],且使用的GPU是美国英伟达公司设计生产的[15]。由此可见,当前国内成像声呐所使用核心处理器主要还是依赖进口,而当前国外的高性能芯片对中国进行了出口限制,比如AD芯片、CPU、GPU等器件,因此今后要逐步实现国产化替代。
3 前视避障声呐的发展趋势
3.1 显示方式
二维前视成像声呐性价比高、结构紧凑、功耗低、使用方便,可安装在 ROV、AUV和船舶上,也可以是潜水员手持使用。但二维成像声呐只能呈现目标的轮廓信息,只能获得被测物的距离、方向等数据,复杂环境下,不利于对小目标的探测与识别。三维成像技术获得复杂的3D图像,图像立体、完整、清楚,技术人员可以快速分析或操作。三维显示结合水下增强现实技术,使得潜水员能够更加容易面对各种水下复杂的工作环境。未来的成像声呐显示方式不再仅限于屏幕的三维显示,而是结合增强现实技术,通过AR眼镜进行显示。
3.2 小型化和低功耗
当前高性能三维成像声呐产品体积和功耗依然较大,不利于水下蛙人随身携带和长时间工作,因此低功耗也是未来的发展趋势之一。虽然手持式三维成像声呐可以协助潜水员看清水下工作情况,但是无法解放水下蛙人的双手。因此有必要研究如何将成像声呐进一步做小,使其可佩戴于潜水员的头上,完全解放其双手。
3.3 宽带和多频段
二维成像声呐大多以窄带单频信号作为探测信号,不利于小目标的检测。如果探测信号为宽带信号,则有利于提高回波信号的信噪比,增强目标的检测能力。由于声传播速率的限制,若只能发射单频段的信号,成像声呐的显示帧率无法提升,但若支持多频段发射信号,可以大大提升成像帧率。
3.4 智能化
虽然当前部分前视声呐设备已具备目标的检测识别功能,但仅能针对特定类型的目标,很多情形只能通过人为识别。随着人工智能的技术发展,提升前视声呐的智能检测和识别能力,是未来发展的一个重要方向。
4 结论
前视声呐功能就是将水中目标清晰地展现出来,因此提升前视声呐的分辨率是必然的趋势。此外作为一个探测设备,我们期望该设备的探测距离越远越好,更利于发现目标;便携、低功耗,更利于前视声呐的普及。随着人工智能等自动化技术的发展,成像声呐除了实现高精度的成像之外,也具备了自动检测识别等功能。成像声呐的小型化、智能化为水下无人化平台的发展起到了关键的作用。
