两种DVL参数快速标定算法实验研究
2022-02-13高德洋韩礼波
高德洋 韩礼波
(杭州瑞利海洋装备有限公司,杭州,310023)
DVL主要用于船速测量或水下导航。其工作原理是通过水声换能器向海底发射特定频率的信号,同时接收海底反射的回波信号,并提取回波信号的多普勒频移,得到设备相对于海底的运动速度,对于采用四波束的 DVL来说,在获取速度大小的同时还能得到运动速度的方向信息[1-3]。DVL设备在设计和安装过程中,往往存在两个问题[4-6]:首先是安装偏角,DVL安装之后换能器艏向与安装载体艏向存在一定的夹角,这个夹角可以转化为 DVL艏向与高精度罗经的偏角,解决安装偏角最可行的方法是通过标定算法准确计算出偏角大小,并在后续数据处理时用这个偏角修正测量速度。DVL受换能器及结构制造精度、声速误差及接收回波信噪比等因素的影响,导致 DVL运动速度测量值与真值存在误差,可以将上述差异归结为一个系统修正误差K系数,用以补偿两者之间的差异。
本文主要研究一种利用纵横向速度信息的DVL快速标定算法,在DVL测量底跟踪速度的同时,借助于高精度电子罗盘和差分GPS分别获得航向信息和GPS位置信息,三者结合实现对DVL设备安装偏角和系统误差修正K系数的快速标定。
1 DVL标定算法
DVL能够测量设备相对于海底的速度,想要实现对 DVL的标定,还需要高精度罗经的航向信息和差分GPS的位置信息的配合[7-8]。DVL声学换能器安装完成之后,各方向示意图见图 1。声学换能器艏向与罗经的夹角为α,罗经输出的航向角为φ,DVL测量的底跟踪纵向速度为VDY,横向速度为VDX,也可以将DVL测量的底跟踪速度分解到东向VDE和北向VDN,差分GPS测量的速度也可以分解到东北向VGE、VGN和纵横向VGY、VGX。
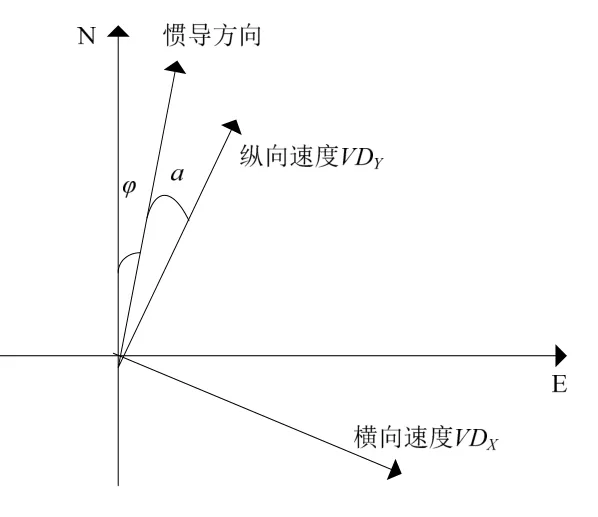
图1 DVL角度示意图
1.1 基于东北向速度的标定
利用 DVL测量的东北向速度,分别计算设备的东北向距离,将所得计算值同GPS测量值对比作差,差值最小则为标定最优。具体流程如下:
(1)数据预处理。按照 3σ原则,同步剔除DVL和GPS测量东北向速度的异常值;
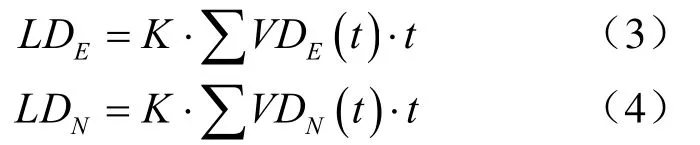
(2)GPS东北向轨迹。将差分GPS的定位信息转换到东北向直角坐标系下,并计算东北向轨迹LGE和LGN:
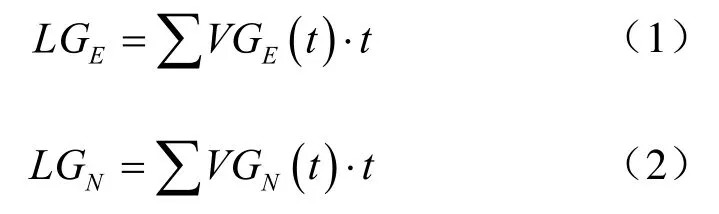
(3)DVL东北向轨迹。设置待标定参数安装偏角α和系统误差修正K系数,将DVL速度信息转换到东北向直角坐标系下,并计算东北向轨迹LDE和LDN:
(4)计算定位误差。将 DVL定位值和 GPS定位值相减,得到总的定位误差:

(5)遍历待标定值。调整待标定参数α和K的值,分别计算不同参数下的总的定位误差。
(6)代价函数最小。定义总的定位误差ΔL为标定算法的代价函数,使代价函数取得最小的待标定参数值即为要求解的值。

1.2 基于纵横向速度的标定
从1.1节可以看出,基于东北向速度的标定方法需要对待标定参数进行遍历计算,极大浪费了计算时间和资源。为了简化标定流程,提高标定算法的计算速度,也可以采用纵横向速度分量的标定方法来获取标定参数。具体流程如下:
(1)GPS速度转换。结合罗经航向信息将GPS定位信息转换为船坐标系下的纵向速度VGY和横向速度VGX。
(2)数据预处理。按照 3σ原则,同步剔除DVL和GPS测量纵横向速度的异常值。
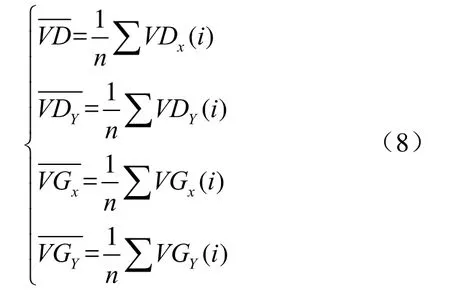
(3)计算速度均值。分别计算 DVL和 GPS的纵横向速度均值。
(4)计算标定系数。按照公式(9)分别计算该航次的安装偏角和系统修正误差K系数。

若标定试验共进行了N个航次,则最终的标定系数为N个航次的平均值:
2 试验介绍
为了验证纵横向速度标定方法的有效性,2022年7月在千岛湖水域进行了一次300 kHz DVL标定试验。采用两种标定方法计算前后DVL和GPS合速度对比如图2所示,标定完成后航迹对比如图3所示。采用两种标定算法对 DVL进行标定,获得300 kHz DVL两个航次的安装偏角α和系统误差K系数,如表1所示。试验过程中,基于东北向速度标定选取的参数范围分为两组:
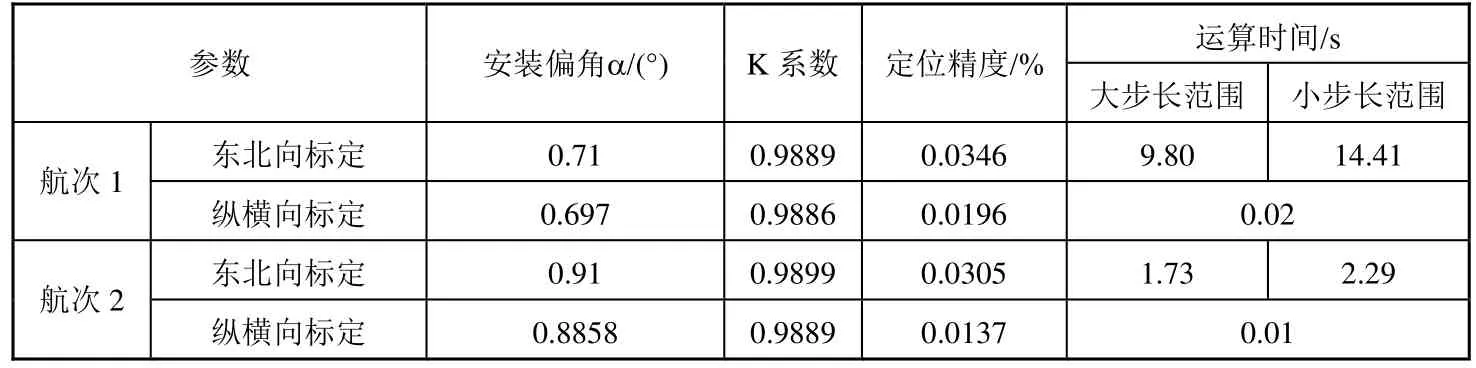
表1 两种标定方法标定两个航次的结果
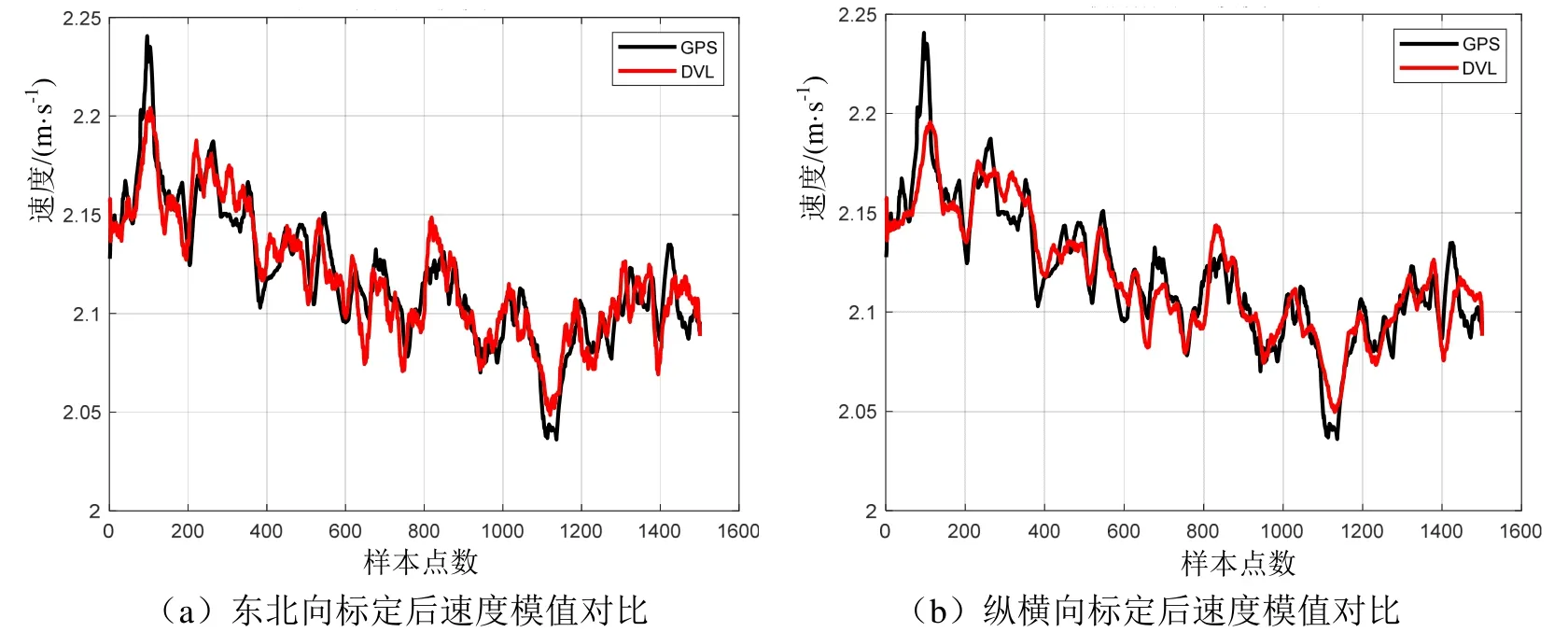
图 2 两种标定方法计算后DVL和GPS合速度对比

图 3 两种标定方法计算后DVL和GPS轨迹对比
(1)步长较大的粗略估计α~[-20∶0.1∶20]和K~[0.95∶0.01∶1.05];
(2)步长较小的精确搜索α~[-1.5∶0.01∶1.5]和K~[0.98∶0.001∶1]。
从图2~3和表1可知,基于纵横向速度标定的结果和基于东北向速度标定的结果基本一致,都能满足标定要求,但是前者的运算速度相较于后者有大幅度的提高,说明前者在实际应用中能够提高运算速度,实现快速标定。此外,东北向标定方法的时间消耗主要与数据量大小和标定参数搜索点多少有关。由于航次1和航次2的数据量大小不同,导致东北向标定方法所需要的计算时间也不相同。两个航次在不同的标定参数范围下所消耗的时间是相似的,小步长范围对应的搜索点相较于大步长多,所以小步长范围所需要的时间更长。
3 结论
DVL设备在设计和安装过程中存在安装偏角和系统误差修正K系数问题,可以通过东北向速度标定或纵横向速度标定方法解算两个标定系数。本文通过湖上试验比较了两种方法解算标定系数的结果,对于同一批次数据,基于东北向速度标定方法计算量较大,运算速度较慢,算法精度与标定参数搜索范围有关,适用于数据后续精细化处理;基于纵横向速度标定方法计算量较小,运算速度较快,适用于数据实时快速处理。在实际应用中,两种参数标定方法可以作为标定结果的互校准依据,能够辅助试验人员判断标定试验效果,如果两种方法的标定结果一致,则表明标定试验基本成功。
