自动驾驶专用车道的宽度模型研究
2022-02-12王羽尘DenisMWABA
王羽尘,Denis MWABA,于 斌
(东南大学交通学院,江苏 南京 211189)
引 言
随着城市机动化水平的日益提高,道路交通需求不断增长,易出现交通拥堵、环境污染等问题,自动驾驶技术的应用可以从道路参与者这一角度缓解这类交通问题。自动驾驶汽车作为未来道路的主要参与者,数量将在未来迅速增长。由于自动驾驶汽车的技术模式有别于传统汽车,对道路设计的要求也发生了变化[1]。因此,为了促进自动驾驶汽车的推广,从自动驾驶技术和道路建设层面的研究至关重要,可设置专门的自动驾驶专用车道[2]。
国内外专家研究发现,自动驾驶道路通常会有较低的车道宽度,车辆横向控制是确定车道宽度的关键环节[3-4]。而传统道路宽度设计通常从驾驶人的驾驶行为、道路交通量、道路环境因素和车辆行驶速度等角度入手,宽度范围从2.7 m到4.6 m[5],远大于设计车辆的宽度并留有额外的横向空间以允许车辆横向移动,较窄的车道通常用于低流量的道路,较宽的车道用于高流量的道路。然而,由于自动驾驶汽车不受人为因素控制,需要对其进行深入讨论[6]。从运行原理来说,车辆行驶在车道的过程可视为驾驶人与车道之间的互动,而自动驾驶汽车采用横向控制器,消除了驾驶人与车道之间的互动[7-8]。同时,由于V2V和V2I通信,交通量和交通流处于稳定状态,对自动驾驶汽车的车道宽度产生较小的影响。
因此,本文假设横向控制车辆转向角度,使车辆遵循参考路径,研究车辆宽度、天气情况、道路线形和特殊考虑因素等不同参数对车道宽度的影响并进行建模,得到自动驾驶专用车道宽度模型,通过“Automated Driving Toolbox”工具箱和Simulink模块进行车辆控制仿真,使用CARLA软件进行不同恶劣天气和行驶环境的模拟,验证模型的有效性。
1 自动驾驶汽车横向控制理论
通过自动驾驶控制系统可以控制车辆的行驶速度以及方向,使其安全到达规定目标。其中,自动驾驶汽车的横向控制器对车道宽度的确定至关重要[9]。横向控制器的目的在于减小或消除H和ε。前者为车辆行驶与道路曲率方向的差值,后者表示横向跟踪误差。自动驾驶汽车横向控制器分为两大类:几何控制器和动态控制器。几何控制器的计算方法更直接,但计算结果不太精确,例如Pure pursuit控制器和Stanley控制器,其表达如式分别为[10]:
式中ld为前视距离,α表示航向角,L为设计车辆轴距,θp为航向误差,df为车辆预期轨迹与给定路径上切线的交点离前轮的距离,v为速度,kv为增益参数。
动态控制器设计更复杂,需要更多的计算能力,计算结果更加精确,例如模型预测控制器(MPC)。本文主要通过几何控制器来推导与车道宽度的关系,因其(此)可实现性较高[11]。
关于自动驾驶汽车的路径规划算法研究中,将允许最大横向偏差ε和允许最大侧滑角φ应用在车道宽度模型的构建中。路面摩擦系数是另一个影响车辆稳定性、安全性和动态控制的重要因素[12]。国内外专家学者对其开展了研究,提出了路面摩擦系数的估计方法[13]。
总的来说,自动驾驶专用车道的车道宽度与H,ε,φ和路面摩擦系数紧密相关。此外,车道宽度还受到不同天气类型和周期长短的影响,降雪的影响最大,其次是雨天,最后是晴天,主要原因为:①自动驾驶汽车的设备精度受到影响,例如相机检测的精度降低,需要其他传感器(激光雷达和GPS等)共同协作。②自动驾驶汽车的行驶情况受到影响,例如潮湿的环境会降低路面的摩擦系数,造成车辆偏移等。
2 自动驾驶专用车道宽度模型构建
针对正常驾驶的车辆,车道宽度应与设计车辆的宽度、侧后视镜和两侧间隙相匹配,以适应横向位置的变化。根据上一节研究,由于自动驾驶汽车的相关参数直接影响到车辆运行情况和横向行为,车道宽度直接取决于车辆设计宽度与设计速度。故将自动驾驶专用车道的宽度定义为[14]:
式中xr,xl分别为车辆右侧、左侧安全距离(单位:m);wl为车道宽度(单位:m);dv为自动驾驶汽车设计宽度(单位:m)。
两侧安全距离xr,xl主要取决于车辆宽度、天气条件和道路线形等运行环境因素,具体可将运行环境因素分为车辆自身的行驶速度和特殊考虑的环境因素,其计算公式为[14]:
2.1 车辆宽度
由于自动驾驶汽车大多借助于传感器来接收信号进行信息反馈,一些自动驾驶汽车会在侧镜安装传感器,因此本研究考虑侧镜的宽度,将其作为车道宽度系数qz,计算车辆的总宽度。通过收集某一品牌的z辆自动驾驶汽车的宽度,分别统计含有侧镜的车辆宽度dmi和无侧镜宽度的宽度doi,计算的系数qz如下式所示:
式中qz为车辆宽度系数,dmi表示含有侧镜的车辆宽度,doi为无侧镜宽度的宽度,z为收集的车辆数量。
2.2 车辆行驶速度
影响行驶速度的因素主要分为两部分,前者为天气情况,影响了车辆行驶的横向位置,研究表明,不利天气会显著降低速度。后者为道路平面几何元素(包括直线、曲线与交叉口),易引起车辆加减速行为,从而对车道宽度产生影响。
2.2.1 天气情况
引入天气情况(包括晴朗、降雨与降雪)影响因子k以表征天气情况对车辆行驶速度的影响,其最小值根据天气情况取不同值,计算公式为[14]:
式中kmin为k的最小值,取0.85;dv,st为单车道标准设计宽度,取 2.44 m;mr,max,ms,max分别为降雨、降雪天气发生的最大月份数(1-12);其中,降雨量小于10 mm或降雪深度小于10 mm天气情况视为晴朗天气。
2.2.2 道路平面几何元素
引入道路平面几何元素影响因子β以表征不同道路平面几何元素对行驶速度的影响,其计算公式为[14]:
式中fc为轮胎与路面间摩擦系数,取0.7;nlane为车道数;L为设计车辆轴距(单位:m);R为曲线半径(单位:m);l为车辆与交叉口进口处间距(单位:m),取值范围为[10 m,150 m];另外,当0.1fc(nlaneL2)/(2nlaneR)<0.1时,β取 0.1;,β取0.1。
2.3 特殊考虑因素
为描述车道宽度与道路事故率的相关性,引入事故影响因子Sdv,在保证安全性的基础上取0.075。考虑各种特殊考虑因素的重要程度,建立双层分级系统表征不同特殊考虑因素重要程度[15]。其中,第一层级按数字:1,2,3分级,表示因素的综合影响效果程度,重要程度按1至3递减;第二层级以大写字母:A,B,C分级,表示各种特殊考虑因素在第一层级下的影响程度,重要程度按A至C递减,例如:1A重要于1C,而1C重要于2B[14]。分级系统及所考虑的特殊考虑因素如表1所示。
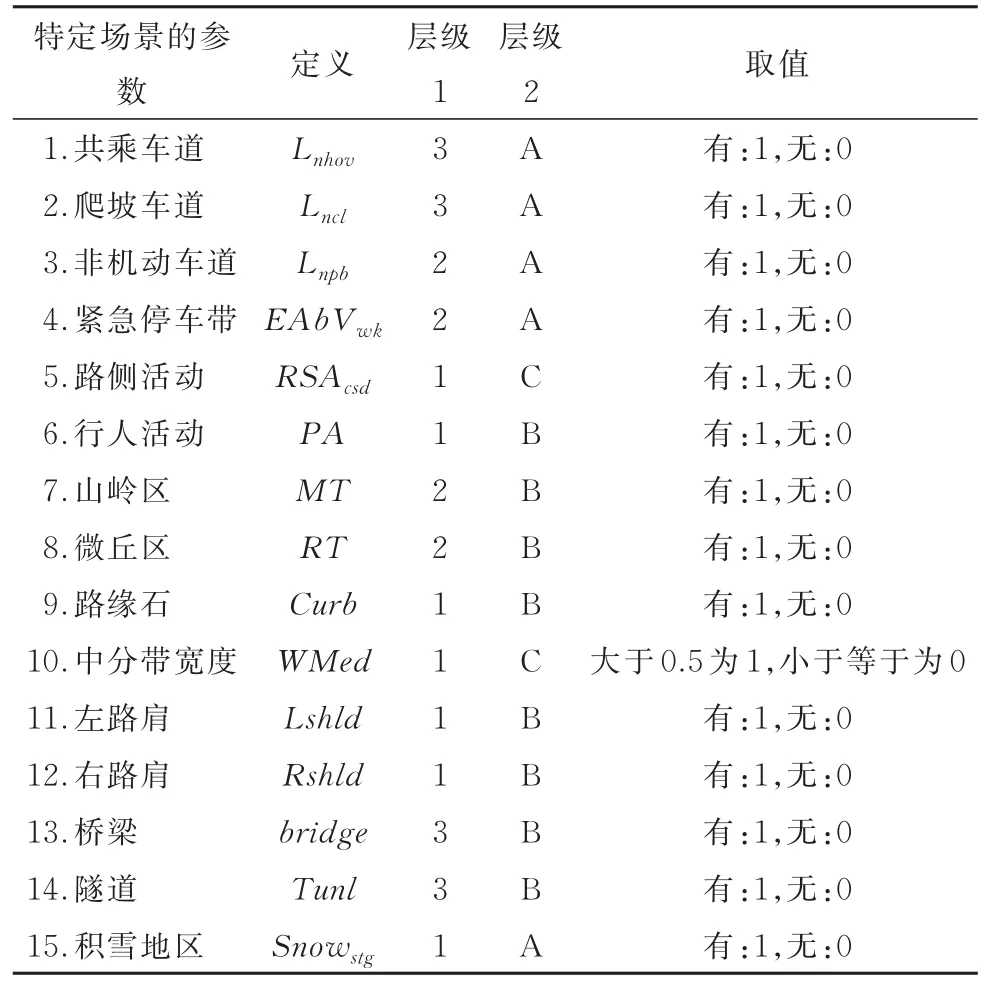
表1 特殊考虑因素双层分级系统
结合事故影响因子Sdv[16],特殊考虑因素用下式表征为:
式中an(n=1~3)为层级加权系数,a1=3.64,a2=0.9,a3=-0.5;bfn为对应层级加权系数层级的特殊考虑因素bf1=Af,bf2=Bf,bf3=Cf,值为条件二进制值(0,1)。
综上所述,考虑天气情况、几何参数,事故影响因子和特殊考虑因素引入4个参数qz,k,β和Sdv修正自动驾驶专用车道宽度模型,完整的计算公式如下:
式中vts为路段的目标行驶速度(单位:km/h);系数c用于将速度单位从km/h转换为m/s,取值为0.2778。
3 模型验证和讨论
本文基于MATLAB的“Automated Driving Toolbox”工具箱和Simulink模块进行车辆控制仿真,结合构建的自动驾驶专用车道宽度模型定义“lane Width Determiner”函数,并使用CARLA软件进行恶劣天气和行驶环境模拟,如图1所示。选取城市道路作为仿真场景,研究不同参数对车道宽度的影响程度,并针对具体的模拟环境开展分析。
3.1 参数影响程度
首先是车辆宽度对车道宽度的影响,将皮卡这种车型作为自动驾驶车辆,收集五个不同品牌的车辆尺寸,如表2所示,根据式(5)可得车辆宽度系数为1.12958。进一步研究车辆宽度随车道宽度的变化趋势。
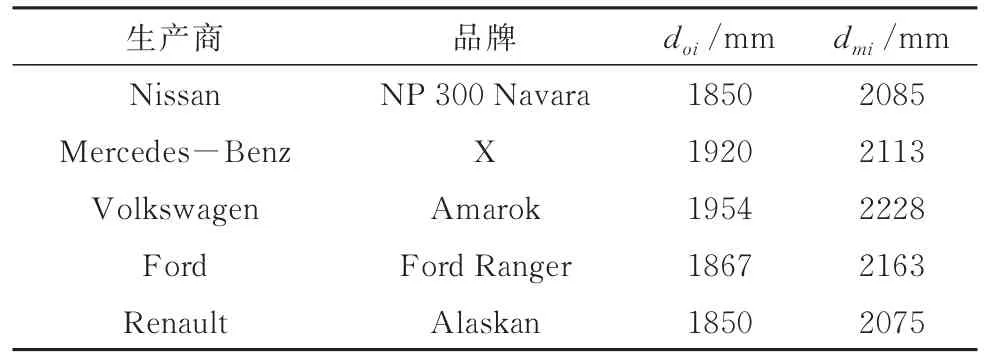
表2 有无侧镜的不同品牌的车辆宽度
其次,对不同天气情况和道路环境组合下的车道宽度进行比较(D,R,S分别为晴天、雨天和雪天;Str,Cur,Int分别代表直线、圆曲线和交叉口路段),如图2(a)所示。接着,分析天气情况这一单因素在不同速度下对车道宽度的影响,如图2所示的(b)。从图中可知,随着车辆行驶速度从10 km/h提高到140 km/h时,晴天环境下车道宽度从2.9 m增加至3.04 m;雨天从3.02 m到3.43 m;雪天从3.02 m到3.53 m。由图2(c)可以看出,车辆宽度增加1.3 m,车道宽度从1.79 m增加到3.28 m,车道宽度随着车辆宽度的增加呈比例增长。最后,讨论特殊考虑因素组合和雨雪天的月数对车道宽度的影响,例如雪天环境下的复杂道路情况(有路侧活动)对车道宽度的影响较大,如图2(d)和(f)所示。以上的参数分析验证了自动驾驶专用车道宽度模型构建的合理性。
3.2 模拟场景分析
场景一:自动驾驶车辆行驶在一条250 m的直线路段,车道宽度为3.01 m,以不同速度下进行仿真。从图3可知,除了车辆初始运行阶段,出现横向漂移,其余直线道路的横向漂移可以忽略不计,并且在更高的速度下,它表现出更显著的横向偏差。
场景二:自动驾驶车辆经过一个环形弯道后返回交叉口,车道宽度为3.01 m。从图4(a)可以看出,当车速为40 km/h时,侧向偏移在允许的范围内,且在交叉口侧移明显,这是由于交叉口物理区内没有车道线。蓝色阴影区域表示车辆车身轮廓,而车道边缘为灰色阴影区域,0轴表示车道中心线。从结果可以看出,车辆以40 km/h的速度安全行驶在车道,验证了车辆宽度与车道宽度是密切相关的。
场景三:当自动驾驶车辆以50 km/h行驶在半径为110 m的环道,结果如图4(b)所示。该车辆在行驶两圈时能够安全地通过该路段而不偏离车道。经过13 s和28 s之后,每一圈的开始都会出现横向不稳定。而通过连续弯道时,需要将车速降低到30 km/h,以保证车辆未偏离车道,如图4(c)所示。
从不同道路平面线形组合的角度,对直线路段、环形弯道路段连接交叉口以及环道和连续弯道三种模拟场景进行分析,研究自动驾驶车辆在不同行驶速度下的横向移动。模拟场景的仿真结果表明,当宽度为2.44 m的自动驾驶汽车以60 km/h或更低的速度行驶在城市道路的直线路段时,不考虑潮湿或降雪情况下,车道宽度为3.00 m可以满足安全需求。但考虑到雨雪天气条件的影响,最小专用车道宽度为3.29 m(考虑到4个月的降雨季节)。因此将现有的车道宽度由3.6 m减少到3.00~3.30 m,仍能在相同速度下容纳相同的车辆宽度,且车道宽度减少了12.5%。对高速公路进行了类似的分析,雨天情况下,当自动驾驶车辆的行驶速度为110 km/h时,最小专用车道宽度为3.41 m,车道宽度减小了近11%。
通过CARLA软件获取自动驾驶车辆的横向偏差值并绘制每个时间步长内的车辆轨迹和路径之间的差值,原点代表车辆沿道路中心线行驶时轨迹。雨天情况下,采用横向控制器的自动驾驶汽车以60 km/h行驶时产生的侧向偏差值,如图5所示。当车道宽度从3.01 m增加至3.55 m,最大侧向偏差小于0.4。
图 6(a)和(b)显示了采用 Pure pursuit横向控制器、限速为50 km/h的自动驾驶车辆在恶劣雨天气下行驶的横向偏差值。
结果表明,自动驾驶车辆在雨天有更显著的横向漂移。基于构造的自动驾驶专用车道宽度模型可得车道宽度为3.33 m时,能够保证2.44 m的车辆在两侧至少具有0.445 m的横向距离。当车辆处于交叉口和圆曲线路段时,横向间距更宽。从图6(a)可知,车辆没有偏离车道,但在急转弯路段,会接近车道边缘,仿真结果从车辆横向行为这一角度验证了本研究的有效性。
4 结束语
本研究基于自动驾驶汽车横向控制理论分析自动驾驶车道宽度的因素,考虑车辆宽度对车道宽度的影响,分析天气情况和道路线形对行驶速度的影响,讨论了特殊考虑因素对车道宽度的影响,分别确定了各自的加权系数,建立自动驾驶专用车道宽度模型。
利用 MATLAB“Automated Driving Toolbox”工具箱和Simulink模块进行车辆行驶仿真,结合构建的自动驾驶专用车道宽度模型定义“lane Width-Determiner”函数。使用CARLA软件进行不同恶劣天气和行驶环境的模拟。通过分析参数影响程度可知,车辆宽度增加1.3 m,车道宽度从1.79 m增加到3.28 m,车道宽度随着车辆宽度的增加呈比例增长。天气和道路情况等环境参数对车道宽度产生不同程度的间接影响,例如雪天环境下的复杂道路情况(有路侧活动)对车道宽度的影响较大。参数分析结果从影响因素的角度,验证了自动驾驶专用车道宽度模型构建的合理性。
分别研究三个典型的自动驾驶车辆模拟场景,并分析车辆的横向偏差,仿真结果表明,当宽度为2.44 m的自动驾驶车辆以60 km/h或更低的速度行驶在城市道路的直线路段时,车辆的横向漂移可以忽略不计,车道宽度为3.00 m可以满足安全需求。考虑到雨雪天气条件的影响,最小专用车道宽度为3.29 m。而经过交叉口和连续弯道时,车辆存在小范围的横向漂移,将现有的车道宽度由3.6 m减少到3.00~3.30 m,仍能在相同速度下容纳相同的车辆宽度,且车道宽度减少约12.5%。高速公路情况类似,车道宽度可减小11%。在此情况下,采用Pure Pursuit横向控制器的自动驾驶车辆均能保持安全的横向距离。仿真结果从车辆横向行为这一角度验证了模型的有效性,未来可进行相关实车试验。同时考虑其他车辆,行人、非机动车等横向干扰,进一步优化自动驾驶专用车道宽度模型。