未来空域窗射击体制仿真实验验证*
2022-02-12陈维义戴锐彬
陈维义 戴锐彬
(海军工程大学兵器工程学院 武汉 430033)
1 引言
对于舰艇编队来说,防空反导一直是重要的问题,在反导武器中,舰炮处于火力网的最内层,是舰艇的最后一道防线。近年来,各国加快发展高超声速武器,以2020年十月俄亮相的“锆石”反舰导弹为例,其最大发行速度达8马赫,在舰炮对此类高超声速目标进行拦截时,由于目标运动速度快,跟踪滤波器对目标的定位跟踪能力有限,使得火控系统在计算提前点时精度下降,传统的集火射击方法对目标的毁伤概率也随之降低。
为了克服传统集火射击体系的缺陷,国内外学者提出[1]并不断改进未来空域窗设计体制[2],国内文献[3]提出了最优射击实际的计算方法;文献[4]提出了散步中心的菱形分配法,文献[5]提出了最优空域窗的配置方法,文献[6]提出了网状形配置瞄准点。
本文结合未来空域窗的构造方法[6~7]建立典型反舰导弹末端航迹模型,模拟完成舰艇对反舰导弹进行跟踪滤波、计算未来点、配置未来空域窗、解算射击诸元的过程,通过仿真弹道与导弹航行区域进行比对,统计命中导弹的炮弹数量,并与集火射击体制相对比,以验证未来空域窗射击体系的效能。
2 仿真实验工作流程
针对小口径舰炮拦截反舰导弹的实际问题,仿真实验的整体思路为首先建立反舰导弹航迹模型并同时根据参考导弹外形参数建立导弹航行区域,在目标航迹模型数据中掺杂噪声信号后当做传感器采集到的信号,进行滤波处理后将信息送入火控解算模块进行解算,根据未来空域窗理论,得出射弹时机[3]、数量等信息[7~8],随后生成理论炮弹弹道,再对每枚炮弹生成随机射弹误差,通过计算得到该枚炮弹在仿真条件下的“实际”弹道,最后比对反舰导弹模拟航路和炮弹模拟导弹,判断是否命中目标。在相同条件下反复进行仿真实验以避免随机误差造成的影响。仿真实验工作流程如图1所示。

图1 仿真实验流程图
3 仿真实验的关键流程
3.1 反舰导弹航路生成
本文假定反舰导弹弹道类似于俄罗斯宝石导弹弹道,其前段巡航高度10000m~30000m,距目标50km~70km时降低高度到5m~60m,掠海低空飞行接敌。反舰导弹的整个飞行弹道包括发射段、控制巡航段和机动搜索阶段,而对于舰炮武器拦截反舰导弹问题来说,导弹发射段、自控或指令控制巡航段以及机动搜索段由于距离较远,因此本文不再讨论,假定反舰导弹末端的自导引规律为比例导引律,而我方舰艇沿正东方向航行,航速30节。以反舰导弹结束平飞,开始转入比例导引阶段的时刻为计时起始时刻进行仿真实验,仿真时间步长Δt=1ms,并以计时起始时刻我方舰艇位置为原点,沿原点纬线的切线方向指东为X轴正方向,沿原点的经线方向指北为Y轴正方向建立地理参考系,在该参考系下反舰导弹初始位置为(10000m,40000m,60m),反舰导弹速度Vm=2100m/s,[9]比例导引系数K=3,用Matlab进行仿真[10]其模拟航路示意图如图2所示。

图2 反舰导弹末端弹道示意图
3.2 未来空域窗配置
若记Dm(t)为反舰导弹弹道,为反舰导弹弹道估计值,若t=ti瞬时,估计值处于舰炮射程之内,记以该点为提前点计算出的舰炮理论弹道为Dti(t),则反舰导弹和炮弹在该时刻的速度分别为,理论弹道在该点的弹头存速,则过的迎弹面在地理坐标系下的解析式可由平面的点法式方程确定。其几何关系如图3所示。
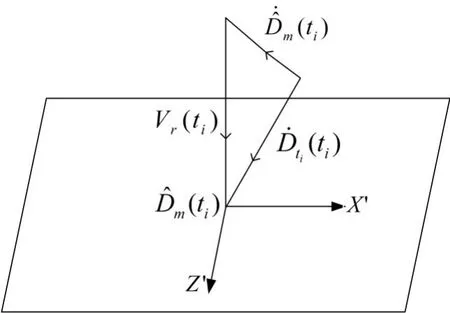
图3 迎弹面几何关系示意图
未来空域窗的瞄准点依据文献[6],采用网状形状配置,在迎弹面内直角坐标系下各瞄准点坐标如图4所示。

图4 瞄准点配置
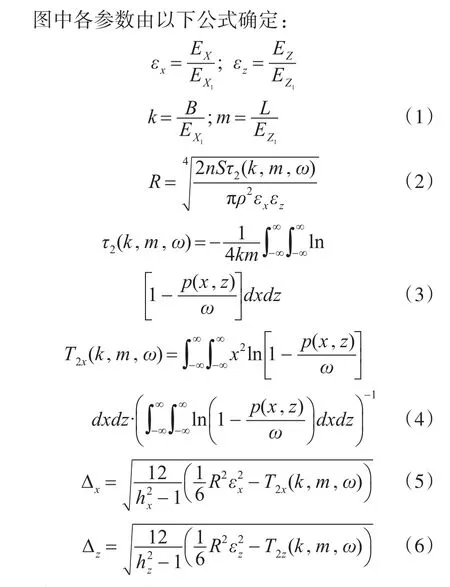
其中一次齐射炮弹数量n=150,总计配置瞄准点数h=25,网状空域窗行数及列数分别为hx=5,hz=5,假设炮弹在任意迎弹面上的射弹散布误差都服从参数σ1=σ2=1的高斯分布,ω=1,观测误差EX和EZ由仿真实验统计算出,B,L为反舰导弹的等效宽度和长度,其取值依据反舰导弹姿态和迎弹面方程而变化。
3.3 模拟弹道生成与命中判断
为了模拟实际舰炮炮弹拦截反舰导弹的过程,在模拟某一特定舰炮炮弹弹道时,先计算出理论弹道在迎弹面上的弹着点,随后叠加上射弹散布误差,得到该炮弹在迎弹面上的实际弹着点,从而逆推弹道。同时在反舰导弹全航路上构建导弹运动区域模型,具体方法是以一主体为圆柱体,顶部为圆锥体的三维体近似代表反舰导弹在全行路飞行过程中所处的空间区域,其参数依据“花岗岩”导弹设定[11],圆柱体高10m,截面半径0.55m,圆锥体高0.5m,关于反舰导弹的姿态确定问题,本文近似认为在较小时间间隔(0.001s)内反舰导弹中轴线方向与该时间间隔内的平均速度方向一致,在导弹飞行过程中,忽略质量损失等因素引起的外形变化以及质心偏移。图5为反舰导弹在t=0时刻所处区域与姿态示意图。
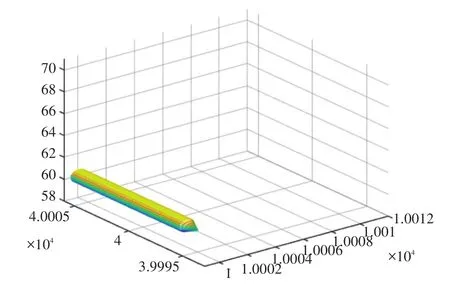
图5 导弹外形示意图
通过对比舰炮炮弹弹道与导弹运动区域模型,若在某一时刻,炮弹位置属于与导弹运动区域,则认为该炮弹命中了目标。
4 仿真结果及分析
4.1 滤波与预测
假设跟踪器在计时开始时刻对反舰导弹进行跟踪,同时将数据传输至相关模块完成滤波、提前点计算的工作,在反舰导弹进入舰炮有效射程之前,只对探测数据进行滤波处理,而在进入我方小口径舰炮有效射程后,即刻根据观测数据对未来点进行预测估计对直至反舰导弹脱离小口径舰炮射程,在本文的仿真实验中,假定小口径舰炮系统的射程为300m~3000m,弹丸初速1000m/s。假定观测器的距离观测误差μD~N(0,502),单位m,高低角观测误差με与方位角观测误差μβ均服从N(0,52),单位毫弧度。滤波方法采用文献[12]中的IMM滤波方法,图6~8在某次重复实验中高低角、方位角、目标距离的观测值、真实值与滤波值的变化情况。
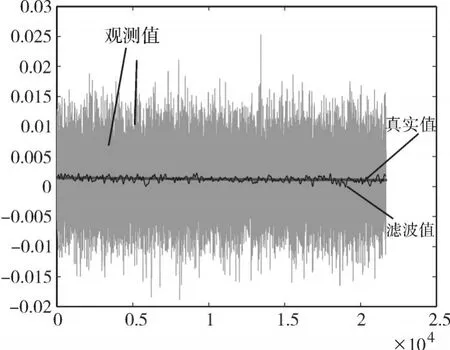
图6 高低角滤波结果
4.2 仿真实验命中结果及分析
对于单次实验,主要考察不同射击模式的炮弹命中数量。图9为某次实验结果示意图,为了便于分析在图中加入了预测与滤波误差曲线,该曲线表示火控系统计算出的理论弹着点与目标实际航迹点的距离偏差随时间的变化(图中数据在经过归一化处理后在纵轴方向进行了缩放)。
图7 方位角滤波结果

图8 距离滤波结果
从图9的单次实验结果上看,未来空域窗的射击性能较为稳定,在全部的模拟射击次数中,绝大多数情况下均有炮弹命中反舰导弹,而在少量时刻的模拟射击中,集火射击的命中情况要优于未来空域窗,且这种情况随着时间的推移越来越频繁。发生这一情况的主要原因在于集火射击体制对于探测、滤波火控解算等过程中的误差抗性较低,因此当某次射击时随机误差在事实上对火控系统进行了修正时,就使得集火射击模式的命中弹数陡然提高,且随着时间推移,反舰导弹距舰艇距离缩短,随机误差对系统的影响就更加显著。
图9 单次实验命中数量
在重复1000次试验后,除了考察各射击时刻命中炮弹数量以外,还考察两种射击体制在每次射击中是否能成功命中反舰导弹,即在每次150发的炮弹射击中,若有1发以上命中反舰导弹,则认为该次的射击为成功的。图10和图11分别为在1000次重复实验中,不同时刻模拟射击中,两种射击模式的平均命中炮弹数量和平均射击成功概率。

图10 千次实验平均命中数

图11 千次实验平均成功率
从图10与图11中不难看出在1000次模拟实验过程中,未来空域窗的整体命中成功率相较于集火射击有明显的提升,但是两者的整体命中率都并不高,峰值也不超过0.3,也就是说在本文的模拟条件下,每次射击150发舰炮炮弹的情况下,也需要较多轮次射击才能命中反舰导弹。主要原因在于高超声速武器的高速机动使得对其进行探测与航迹处理时,精度下降,如图所示,列出了在1000次模拟实验中滤波与预测模块给出的未来点序列与反舰弹道实际航迹的距离偏差均值。通过分析仿真实验结果可以得到以下结论:
针对末段航路以比例导引律导引的高超声速反舰导弹,当以未来空域窗射击体制对舰炮系统进行瞄准点配置时,命中效果明显优于集火射击体制,这与理论分析的结果[13]是一致的。
5 结语
本文通过对舰炮系统拦截反舰导弹问题进行仿真分析,提出了利用未来空域窗射击体制对处于末段航路反舰导弹进行拦截的仿真实验的主要流程,并分析了在仿真条件下如何根据未来空域窗理论生成考虑各类误差的炮弹弹道,并与反舰导弹的运动模型进行对比,在全航路上进行命中判断的算法。最后依据仿真实验结果,对未来空域窗和集火射击体制进行了对比分析。仿真实验表明,在探测和预测精度不高的情况下,相较于集火射击体制,未来空域窗确实具有更高的命中率。
