一种基于DSP 技术的采煤机自动控制系统设计
2022-02-10覃正强
叶 青,覃正强
(1.柳州职业技术学院,广西 柳州 545036;2.百色职业学院,广西 百色 533000)
0 引言
随着煤矿高质量发展的需求不断提升,现代化矿井努力通过推进“四化”来提升安全生产标准化水平,已经成为现阶段的业界共识与普遍追求。在科学技术的驱动作用持续释放的当下,煤矿综采工作面的自动化、信息化、智能化改造水平仍要进一步提高。采煤机作为煤矿综采工作面实现高质量回采的核心设备,有必要增加自动化技术的投入。而从现阶段国内中型煤矿的综采工作面采煤机运行情况看,多数仍以人工操控或遥控器操控为主,不具备高水平的自动控制能力。本研究设计一种基于DSP 技术的计算机自动控制系统,面向自动化工作面建设要求,以双DSP 为主架构,发挥DSP 的独特数算能力实现对综采工作面采煤机的日常作业工况的数据采集与处理,以达到采煤机自动截割、远程监控,组态设计稳定等目的,最终提升综采工作面采煤机的操作自动化水平。
1 自动控制系统的总体设计方案
综采工作面若拥有较为稳定的煤层以及顶底板结构,煤层厚度较大,则在推行综采工艺的过程中机械化程度将明显高于95%。综采工作面一般都会布置众多具有不同功能的大型设备,诸如滚筒采煤机、液压支架、刮板输送机、顺槽转载机、带式输送机等。其中,采煤机具有关键性地位,往往拥有较复杂结构。所研究设计的综采工作面采煤机计算机自动控制系统采用主从双DSP 控制内核结构,建立DSP/BIOS 即时嵌入式操作系统。该系统的主要功能是:由机组传感器对不同数据进行采集,实现实时通讯,确保输入输出的灵活控制,有效完成自动截割等工艺组合,接受远程监控保障安全生产,简言之就是采煤机主要包括基础控制、自动截割、工艺配组、远程监控等功能[1]。
主DSP 采用德州仪器(TI)公司研发的32 位定点微控制单元(MCU)TMS320F2812,具备多重总线接口,实现采煤机自动控制系统的信息采集、数据传输、交互通信等基本功能;辅DSP 采用TI 公司的TMS320F28335,具有32 位浮点处理单元,实现自动控制相关的算法处理,缓解软件开发压力;双DSP 间经SPI 总线接口建立通信渠道。而采煤机自动控制系统的远距离监控功能将采用CAN 总线来连接采煤机与上位机,前者的工况数据传至上位机后,后者直接发布命令指挥采煤机的实时动作。自动控制系统的硬件如图1 所示。

图1 采煤机的计算机自动控制系统硬件
采煤机的计算机自动控制系统主要工作原理为:主DSP 完成机组运行状态的物理量监测、采集、通信,在数据解码处理中准确定位采煤机在综采工作面的位置,获取机身倾斜角度与俯仰角度以及摇臂高度,所有监测数据均在本地和远程监控平台上同步显示。主DSP 将电气系统的电气参数以及工作面煤层建模数据一并发送至辅DSP,后者执行相应的机组截割负载预测、牵引速率自控、摇臂调高预控、故障预测等算法,并将数据传回主DSP 后实现采煤机组的控制[2]。
2 自动控制系统的功能设计
采煤机的计算机自动控制系统的功能如图2 所示。自动控制系统主要有基本控制、自动截割、工艺配组、远程监控等功能。
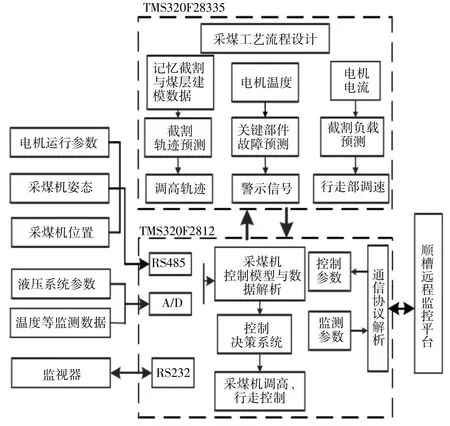
图2 自动控制系统的功能
2.1 基本控制模块设计
2.1.1 接口模块设计
在数字量接口模块设计方面,可由主DSP 的通用输入输出多路复用器GPIO 口通过复杂可编程逻辑器CPLD 扩展,并经IO 接口的光电隔离设计来完成。此设计方法可增进对控制单元的保护,并能提升IO 接口的驱动电压,达到匹配采煤机自动控制所要求的24 V。
在数字量采集模块设计方面,机组上搭载传感器,发出具有固定格式的命令来采集机组的倾角、变频器、编码器以及惯导数据等数字量信号,采用RS485 接口通讯,确保数据达到10 Mbps 的高传输速率,并增强信号抗扰性,提升传输距离。
在模拟量采集模块设计方面,主要通过主DSP内部的ADC 模块来发挥作用,该模块具有16 路,输入电压不超过3.3 V,因此电压信号需经转化来达到电平要求。采煤机的模拟量信号一般包括牵引或截割单元的电流电压等电气参数以及工作面区域的瓦斯浓度等[3],故可选ADC 模块16 路中的不同接口形成对应模拟量的通道接口见表1。
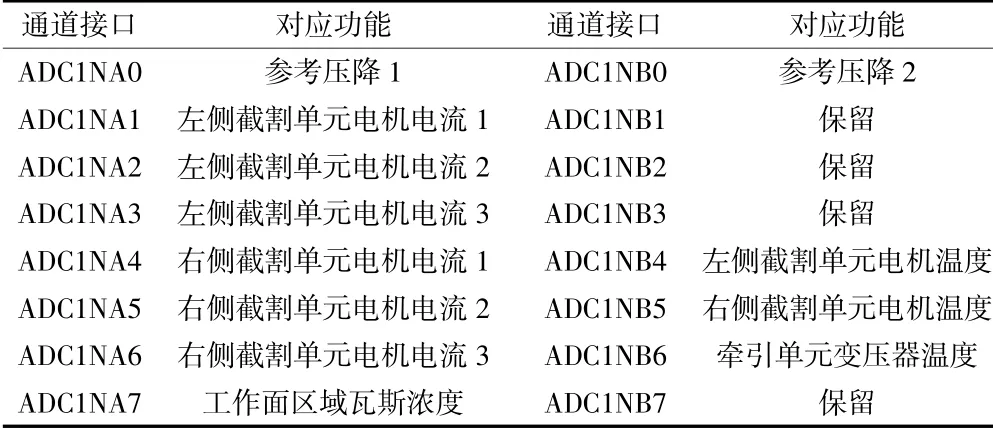
表1 ADC 模块模拟量采集通道接口拟配
在通信模块设计方面,可使用RS232 串口建立通讯接口,由主DSP 内异步串口SCIA 连接MAX3232 芯片而成,通过引脚连接可建立机组与外显示屏的交互通讯。
2.1.2 基于DSP/BISO 系统的程序设计
采煤机的计算机自动控制系统可利用DSP/BISO系统来完成编程,降低编程难度,提升程序运行效率。DSP/BISO 系统同样由TI 公司开发设计,是一类实时性的操作系统,其拥有4 类线程,且优先级各有不同,见表2。

表2 DSP/BISO 系统的线程说明
图3 采煤机的计算机自动控制系统软件的主程主程序中,主DSP 的程序功能主要包括通过PRO 周期函数来发布中断信息采集的命令,而且针对模拟量与数字量的采集中断程序也有所不同。对已经采集的数据,经TSK 数据指令来解析数据后获得采煤机的准确工况信息以及对应的作业运行操控指令。

图3 自动控制系统的软件程序
对于系统子程序的设计,考虑到DSP/BISO 系统属于抢占式的任务机制,因此不同的系统子程序可视为不同线程,因此结合机组的实际控制需求以及程序响应启动的时间可将不同的系统子程序置于不同模块中运行。可将数据采集与通信等相关子程序置于HW1 线程中,而可将数据的衔接与存贮等相关子程序置于SW1 线程中。从采煤机组的控制优先级看,要先等其他子程序执行完取得结果后才能激发运行,进程机组控制可进入到TSK 线程中。因不少传感器需要在采煤机发出命令后才会采集并发回传感数据,因此可把发送命令的子程序置于SW1 软件中断中[4]。
2.1.3 双DSP 通讯的设计
系统总体方案中提到双DSP 间经SPI 总线接口建立通信渠道。SPI 属于全双工通信,可同时满足双DSP 的多端收发数据的需求,保障数据低误率以及通信实时性。TI 公司开发设计的主DSPTMS320F2812和辅DSPTMS320F28335 内部均有SPI 模块的存在,因此,将主DSP 设定为主机模式而将辅DSP 设置为从机模式,并找准对应的引脚来实现数据收发功能。双DSP 的数据通信形式以数据帧为主,主DSP 会按照不同的数据格式来存放与采煤机工况相关的配置信息,并将数据下发到辅DSP,而辅DSP 经过算法控制后向主DSP 返回操作指令,也会按照不同的数据格式来存在有关牵引、截割摇臂调高等信息。
2.2 自动截割模块设计
在截割工作中,采煤机自动控制应关注对牵引速度、滚筒调高、进程响应、工艺衔接等方面的设计。综采工作面的采煤机自动截割作业应对电机负载以及机组移动速度进行监测和及时调整。电机负载监测可通过监测电机的电流、温度、液压等指标水平来实现。自动控制系统的主DSP 将及时采集电机的不同性能参数,并准确解析温度、压力、电流等实际数值,传至辅DSP 后在后者监测下,将对各种参数的超限状态作出预警甚至停机决策,决策按特定数据格式反馈到主DSP 后,后者将解读辅DSP 的监测结果后实施对应决策的相关工作[5]。经辅DSP 内的电机负载估算模型能得到采煤机截割电动机的电流监测值,对机组的负载运算后,按预设负载阈值编码和解码出调速及停机决策。系统负载运行提升后,若拉低牵引速度且机组负载异常,应下落滚筒高度;若滚筒高度降至一定位置后机组的异常负载无法摆脱,则可转换为人工模式进行干预。
2.3 工艺配组模块设计
综采工作面的采煤机自动采煤过程,应增进工艺配组来对应特殊复杂的采煤流程变化,以工艺整合来优化自动采煤作业的适应度。一般采煤流程含多重割煤样态,对于不同禀赋的巷道煤层,采煤流程的差异性可能更突出。故设计采煤机自动控制系统中应设计工艺组合的模块,其中存储典型煤层或巷道的参考采煤流程,特别录入各工序的数信息。一旦辅DSP对机组摇臂的调高轨迹进行描述运算,可重新形成机组运行与调高作业的轨迹,并通过SPI 将数据格式下的轨迹信息传至主DSP,后者解析新数据包后可直接对应找准采煤机的自动控制激励点,从而控制机组实施自动截割。
2.4 远程监控模块设计
2.4.1 远距离监控设计
在综采工作面,采煤机的远距离监测监控可在远端建立虚拟化的上位监控平台,与工作面的不同设备均保持通讯联系,实行CAN 总线通信,如图4 所示。

图4 自动化控制系统的远距离监控方案
机组控制单元在采集工况数据后按特定格式经CAN 总线发出,在CAN 总线网络中的不同设备可识别并判断特定标识符,从而接收对应的数据,因此从机组到远端监控平台中的所有设备都可以接收到针对性的信息,而远端平台也可以在整体读取标识符后向采煤机反馈数据,机组在解析后可获得控制命令并择令而动。整个远距离监控平台将使用Quest3D 虚拟平台,匹配数据库,采用VC++语言设计,彰显其可视化特点,并增加了人机交互的灵活性。
2.4.2 机组与远端计算机的通讯程序设计
采煤机机组DSP 与远端的计算机虚拟系统进行通讯时,可按照图5 所示的流程图来理解工作原理。系统初始化后,GPIO 的引脚也随之初始化,DSP 为CAN 总线所提供的通讯接口eCAN 的收发引脚将得到设置,而eCAN 工作模式也完成了初始化。若DSP收到远端计算机数据后启动中断响应,将在读取和解析数据后确定是否发送数据,并在数据发送完成后清楚发送标识符。

图5 DSP 与远端的计算机虚拟系统的通讯程序
2.4.3 机组历史数据存储模块设计
建立数据存储模块是为将机组运行中的工况进行监控,存储相关监控数据后便于后期查询,并为建立煤层模型提供数据支撑,可在后期读取并调出煤层模型数据来计算机组摇臂的调高参数。本系统主要采用SD 卡来建立存储模块。SD 卡读写速度快且安全稳定,可在SPI 模式下读写数据。首先要完成SD 卡的接口设计,及将SD 卡视为从设备,以主DSP 作为主设备,将对应的管脚进行连接完成接口设计。其次在SPI 模式下完成SD 读写,需要将SD 卡的48 字节位进行代码命令,并做好SPI 模式下SD 命令的宏定义。
为了进一步实现综采工作面采煤机可以在远程计算机或其他嵌入式设备端进行数据交换,应在DSP中完成FatFS 文件系统的移植。FatFS 是一个通用FAT 文件系统,适用于微型嵌入式系统。模块可按ANSIC 标准来编写,且与磁盘输入输出层分离,因而可独立在硬件结构之外。在移植FatFS 文件系统时,应先完成功能配置,并做好硬件逻辑与扇区擦除权限的设置,并对文件系统的数据递进格式、最大可打开文件数等要求进行设置后,可拷贝SPI 模式下的底层驱动程序源文件,编写底层接口,最后利用SD 卡的SPI 模式编写驱动函数以及初始化函数后,将所有的代码置于DSP 工程下后,可通过ff.c 的API 函数直接读写SD 卡内数据。
3 结语
加强采煤机自动控制系统的设计研究,是提升煤矿综采工作面的计算机自动控制系统应用水平的重要要求。通过利用DSP 优越的性能来设计采煤机的计算机自动化控制系统,对采煤机的基本控制、自动截割、工艺配组、远程监控等功能实现进行设计,能发挥良好的自动控制效果,可满足煤矿综采工作面采煤机控制的功能需求。
