深圳地铁车辆脚踏升弓泵应用优化研究
2022-02-10李红佗李凯迪伍珣
李红佗,李凯迪,伍珣
(1.深圳地铁运营集团有限公司,广东 深圳 518000;2.中南大学,湖南 长沙 410075)
为了保证地铁车辆受电弓的正常工作,地铁车辆设置了一套升弓系统管路,通过压缩空气实现升弓操作。同时,为了保障升弓系统可靠性,车辆还配备了机械式脚踏升弓泵(以下简称脚踏泵),防止在电动升弓泵故障时受电弓无法正常工作的问题。
目前,在气囊式受电弓广泛应用的背景下,升弓系统对脚踏泵的要求也越来越高。本文结合实际问题,对用于气囊式受电弓的脚踏泵进行分析,提出了一种脚踏泵的优化方案。
1 问题分析
1.1 工作原理分析
脚踏泵关键部件为活塞式拉杆气缸,其运动平稳,无噪声,工作时吸入大气,提供压缩空气。脚踏泵压缩介质为大气。压缩气缸再回复弹簧的作用下推动活塞伸出,气缸内吸入大气,通过踩踏脚踩杆,将踩踏力转化为压缩气缸活塞杆的轴向力,气缸被压缩,压缩气体经过气路接口处集成的单向阀输出压缩空气。其原理图与关键部件组成如图1所示。
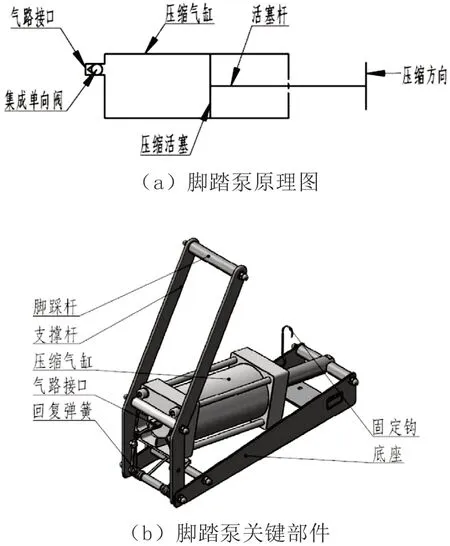
图1 地铁车辆机械式脚踏升弓泵
使用时,将固定勾从支撑杆上摘下,脚踏泵处于全伸张状态,沿下图图示方向踩踏,使脚踏泵气缸压缩,同时,脚踏泵沿气路接口输出压缩空气。存放或者不使用时,脚踏泵处于全压缩状态,使用固定勾勾住。
1.2 实际问题分析
脚踏泵的主要应用环境为地铁车辆在无电、无气下的升弓操作。
在这种情况下,使用脚踏泵升弓需要两人操作。一人在司机室按下升弓按钮,观察情况;一人去7车二位端电气柜中确认升弓风缸压力,如升弓风缸压力在8.0bar±0.2bar以上,按下电磁阀手动操作按钮,受电弓可直接升起,待司机室人员确认总风压力达到5.5bar±0.2bar以上时,可松开电磁阀手动按钮。
如升弓风缸压力低于8.0bar±0.2bar时,需要一边踩脚踏泵,一边按压电磁阀手动按钮,踩踏50~80次受电弓会升起,待司机室人员确认总风压力达到5.5bar±0.2bar以上时,可松开电磁阀手动按钮。
根据文献[2]计算,理论最大脚踏力为705.3N,而在传动效率为90%时,踩踏力为783.6N。实际试验中,在受电弓升至1950mm时,脚踏次数超过70次。
根据深圳地铁1号线续建工程项目合同要求,“受电弓升弓用风泵,泵动不大于50次即可升起受电弓”,可见当前脚踏泵进行升弓打风时存在脚踏次数不满足合同要求、不省力的问题。
2 脚踏泵优化设计
通过以上分析,该脚踏泵不仅存在脚踏力大的问题,脚踏次数也难以满足合同需求。因此,本文针对以上问题提出了一种改进的地铁车辆机械式脚踏升弓泵。
优化后的脚踏泵如图2所示。该脚踏泵在两个独立的单缸脚踏泵基础上加装了额外的可拆卸金属固定杆与可折叠脚踏板,可折叠脚踏板与金属固定杆采用固定连接,与单缸脚踏泵的脚踩杆采用滑动连接。因此,该脚踏泵在使用时只需要简单的组装即可完成,在存放时通过简单拆卸与折叠可以有效减少存放空间。
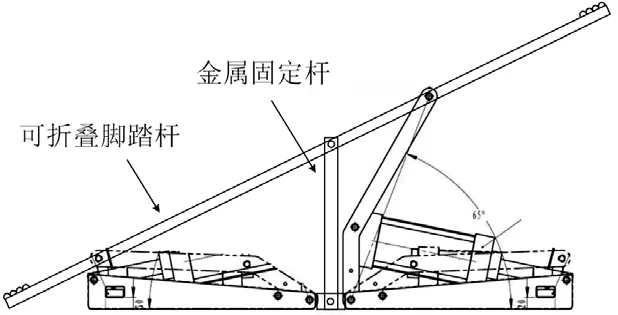
图2 地铁车辆机械式脚踏升弓泵优化示意图
使用过程中,工作人员站在可折叠脚踏板上,双脚踩在可折叠脚踏板两端,交替用力踩压踏板,从而实现两个脚踏泵的空气压缩。
相比现有的脚踏泵,该脚踏泵采用“跷跷板式”的脚踏方式,能够在给受电弓气囊持续输出压缩空气的同时,有效缓解单脚连续踩踏产生的肌肉疲劳,避免受电弓因断续上升而引起的拉弧现象。此外,采用“跷跷板式”的脚踏方式,当一个气缸处于压缩状态时,另一个气缸处于回复状态,能够为可折叠脚踏杆提供一定的回复力,从而达到省力的目的。
3 结语
本文针对深圳地铁现有的脚踏升弓泵在使用时存在脚踏力大,单人难以完成操作等问题,提出了一种优化的脚踏泵设计。优化后的脚踏泵采用“跷跷板式”的设计方案,该方案只需要对现有的脚踏泵进行简单加装即可实现,不需要过多的存放空间。相比现有的脚踏泵使用方式,该设计方案能够在持续输出压缩空气的同时缓解肌肉疲劳并提供一定的回复力,使工作人员在地铁车辆无电无气的条件下升弓更省力。
